
A Multisensor Fusion-Based Cooperative Localization Scheme in Vehicle Networks



Abstract
:1. Introduction
2. Materials for the Cooperative Localization Scheme
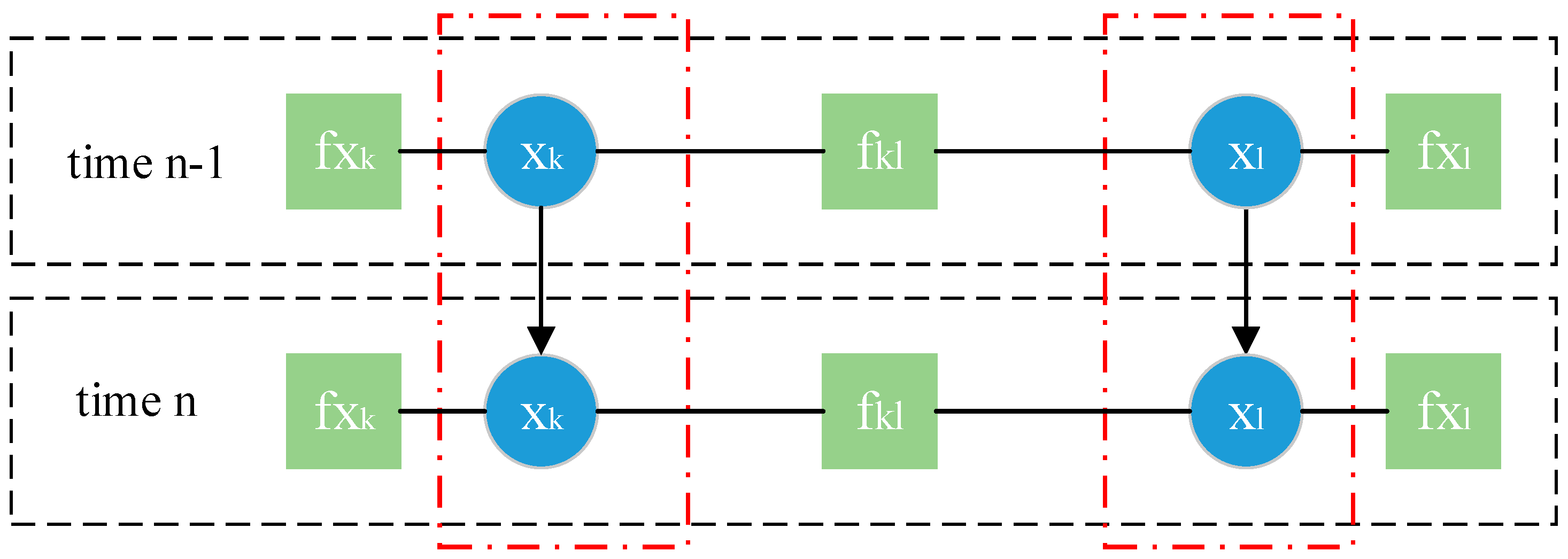
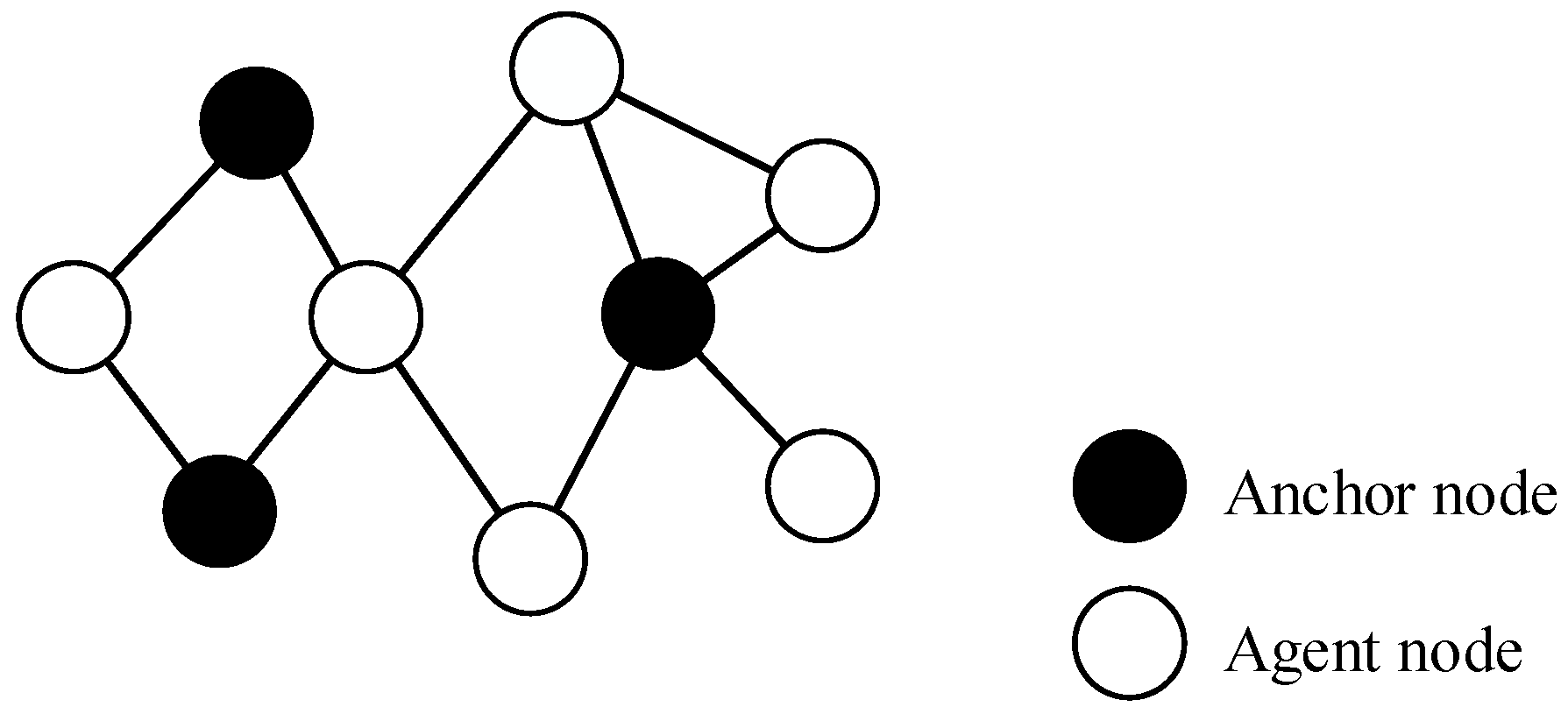
2.1. System Model
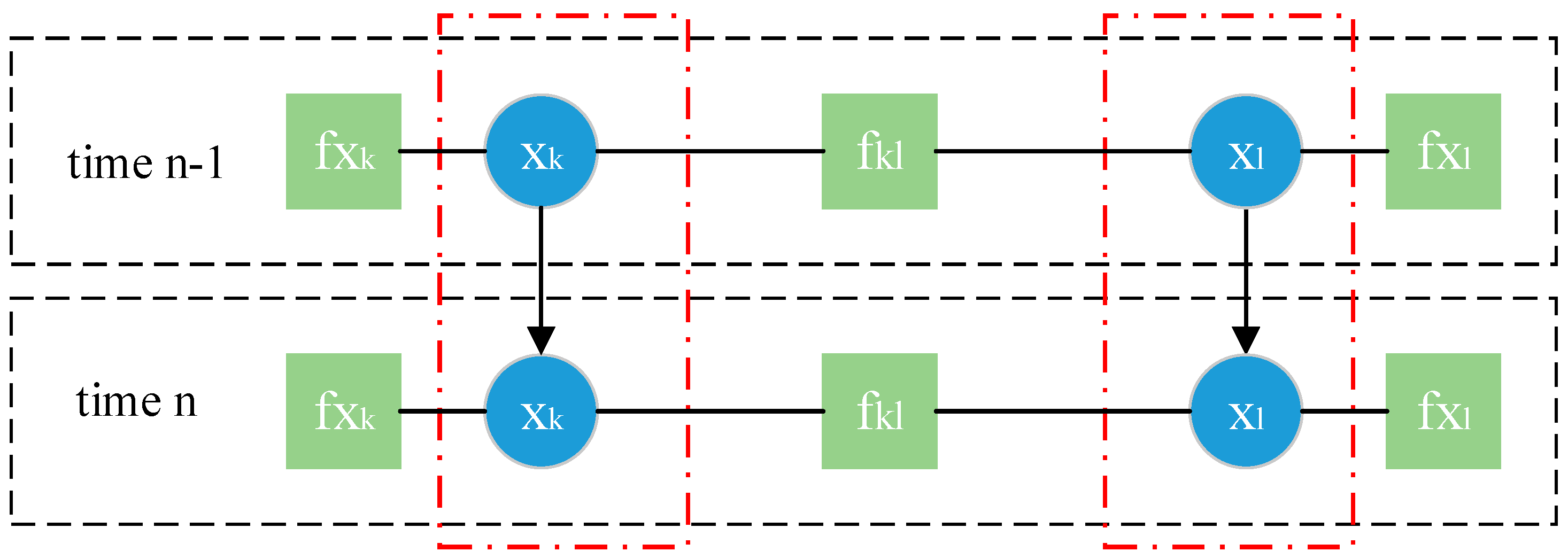
2.2. BP Algorithm for Cooperative Localization
3. Methods
3.1. Position Calculation
| Algorithm 1. Cooperative localization and tracking. |
| Initialization: At time 0 agent drawn from a prior pdf and anchors with accurate locations compose a cooperative network. The distances among nodes are given. For n = 1 to Time Step 1—Prediction: For agent , the prediction messages are calculated to substitute the state transition pdf ; Step 2—BP message passing: The agent exchanges information among neighbors and calculates the likelihood function and ; Step 3—Estimation location: The agents approximate their locations via the MMSE algorithm using the belief and incoming messages. The QPSO–BiLSTM method learns the location of the agent . If the number of its neighbors is less than 3, the agent uses the prediction of the QPSO–BiLSTM method as its location. End for |
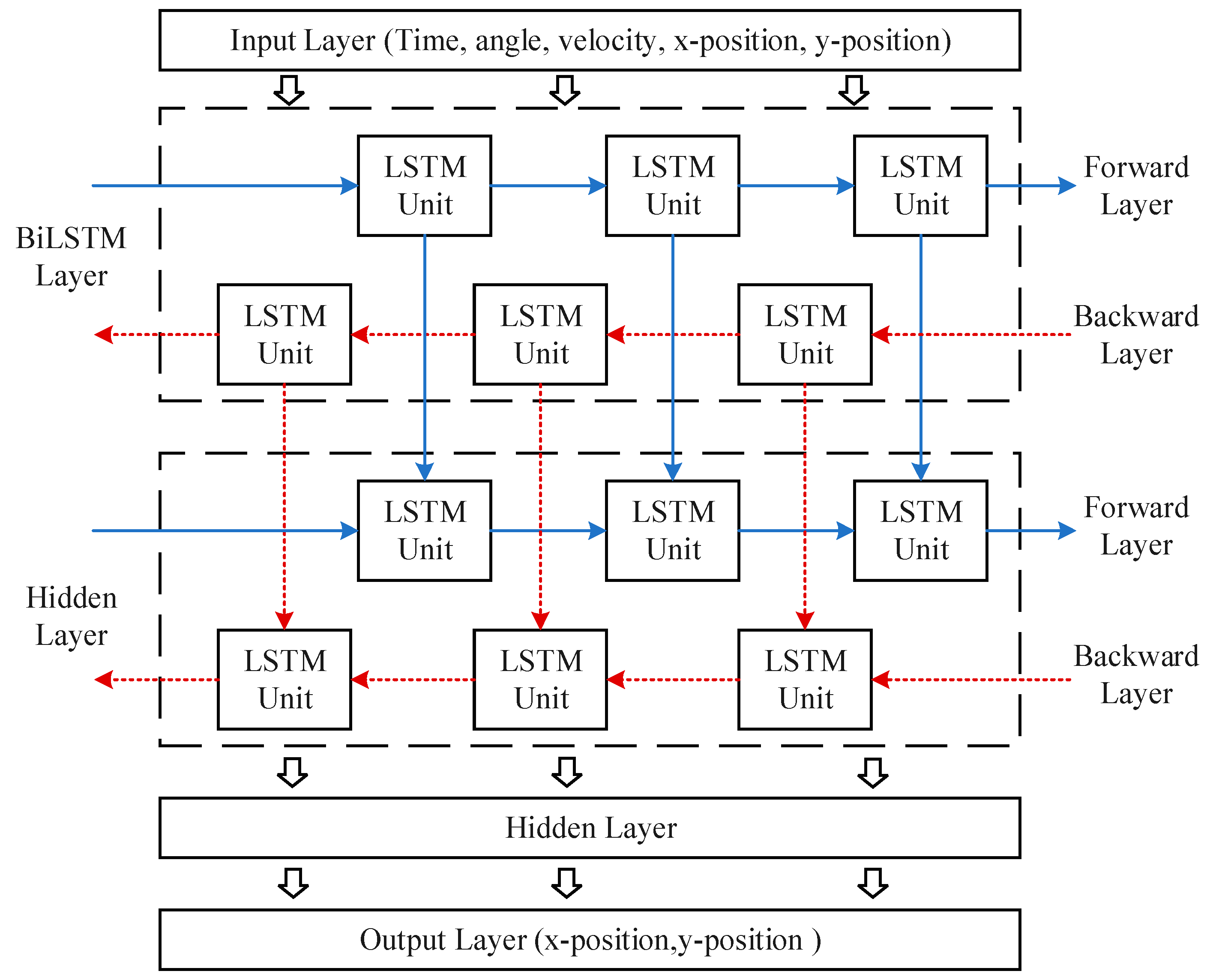
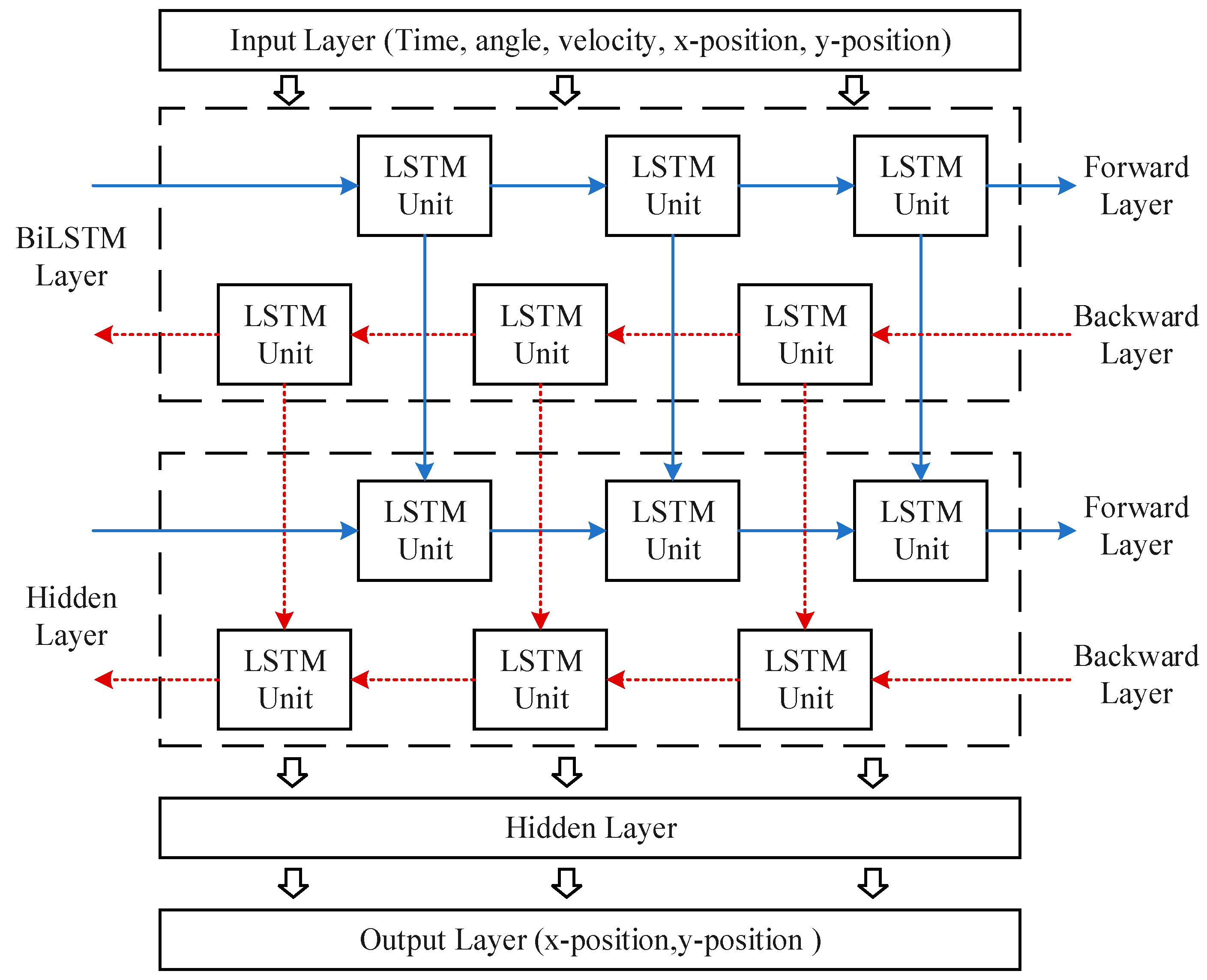
3.2. Sensor Information Fusion and Node Tracking
- Step 1.
- Obtain information about the sensor and preprocess it;
- Step 2.
- Obtain the training data and initialize the parameters;
- Step 3.
- Randomly initialize and input parameters into the network and utilize the MSE function as the fitness function to train and achieve the fitness value;
- Step 4.
- Update the location and velocity of the parameters;
- Step 5.
- Repeat steps 3–4 until the termination criterion is satisfied;
- Step 6.
- Output the optimal weights as the initial weights of the neural network and train the network to obtain the coordinate value.
4. Results
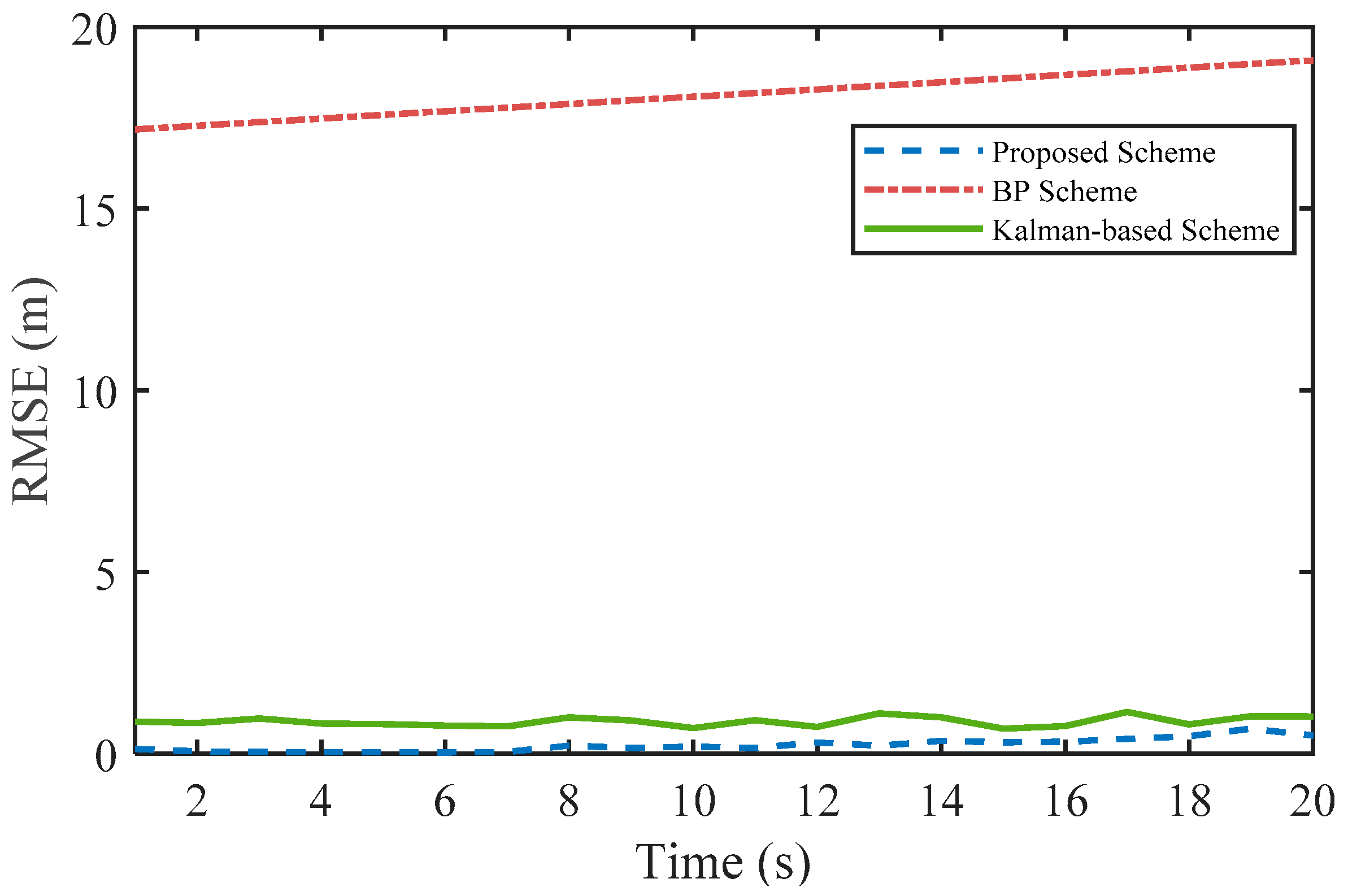
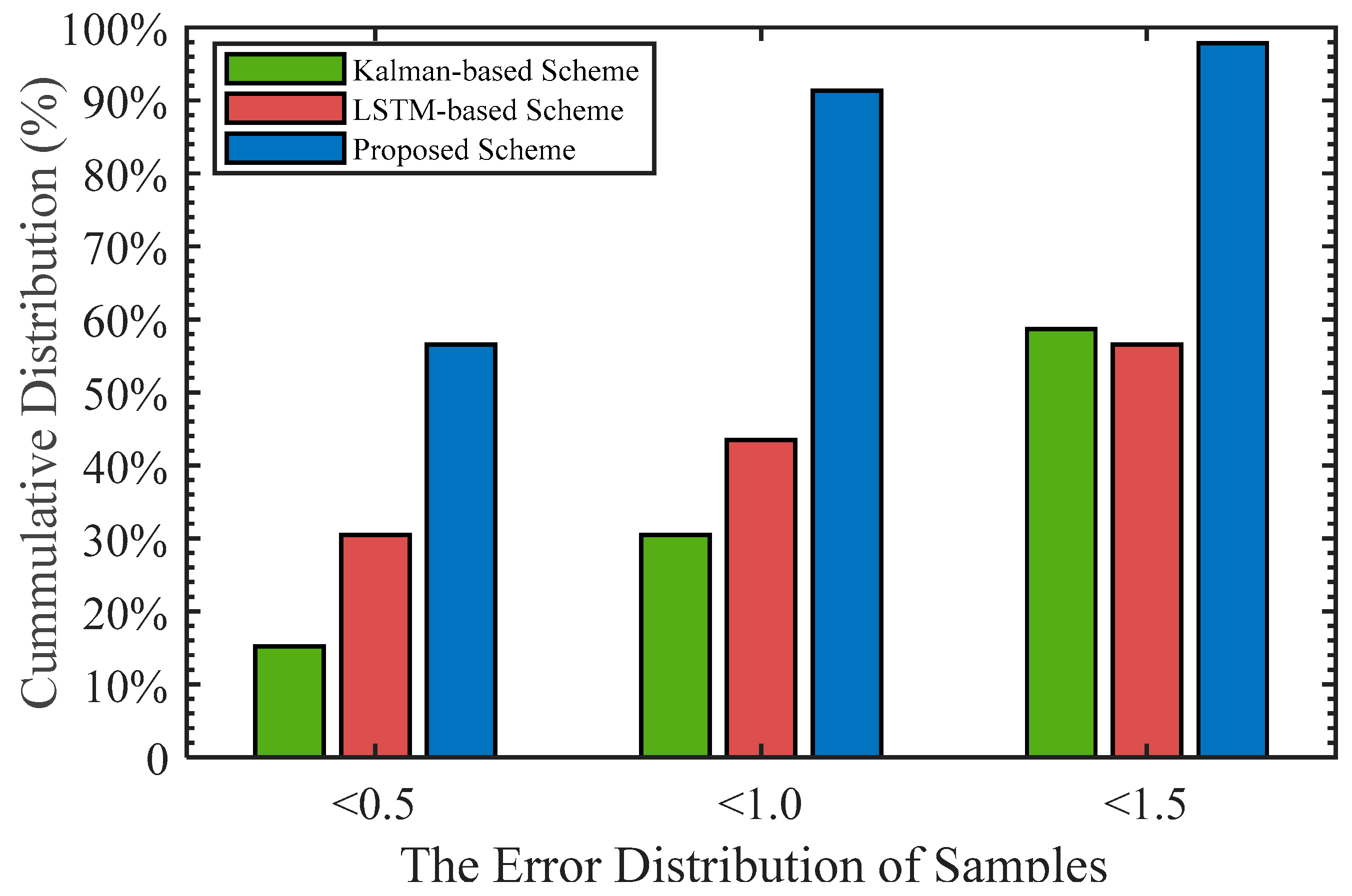
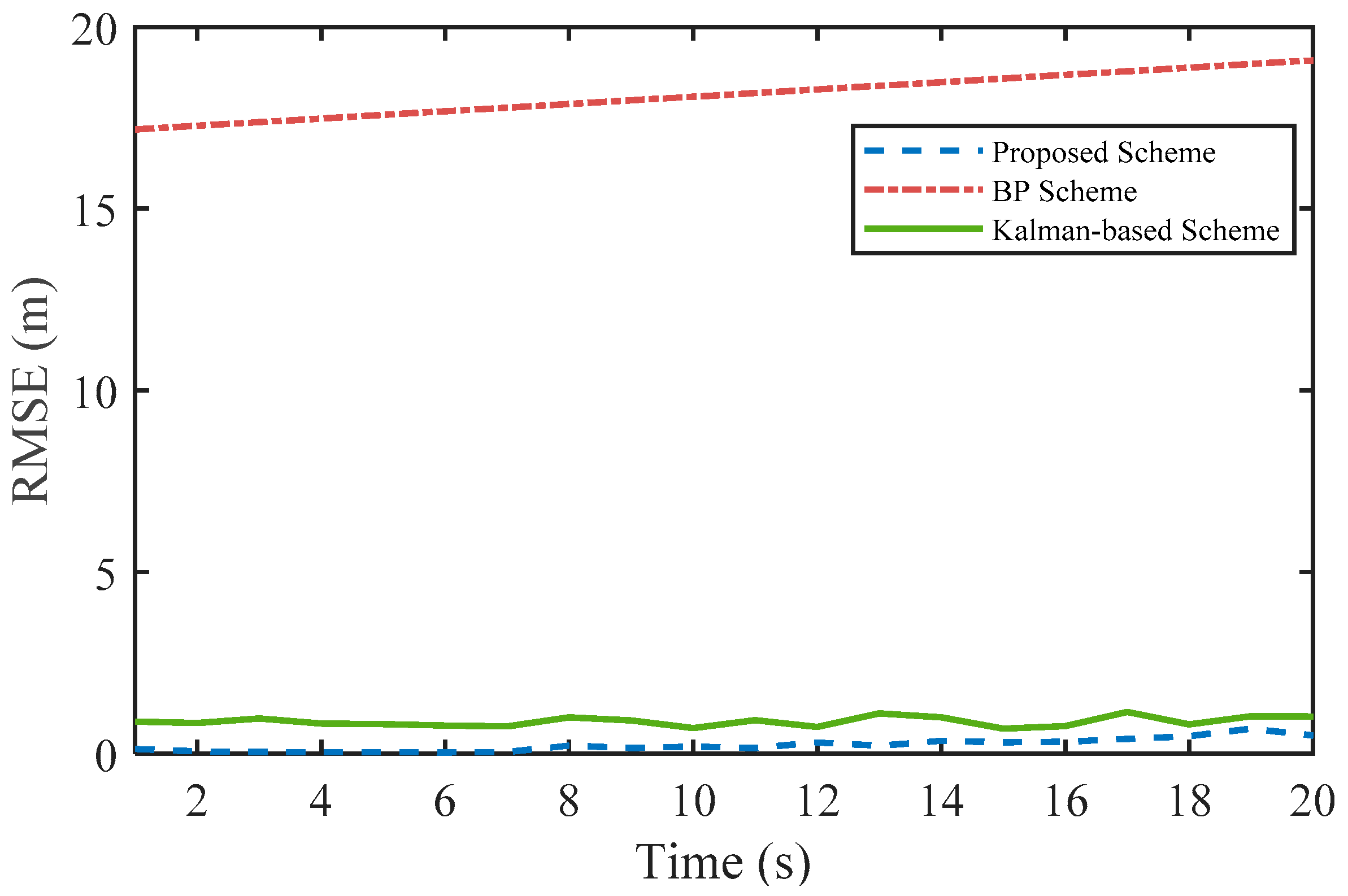
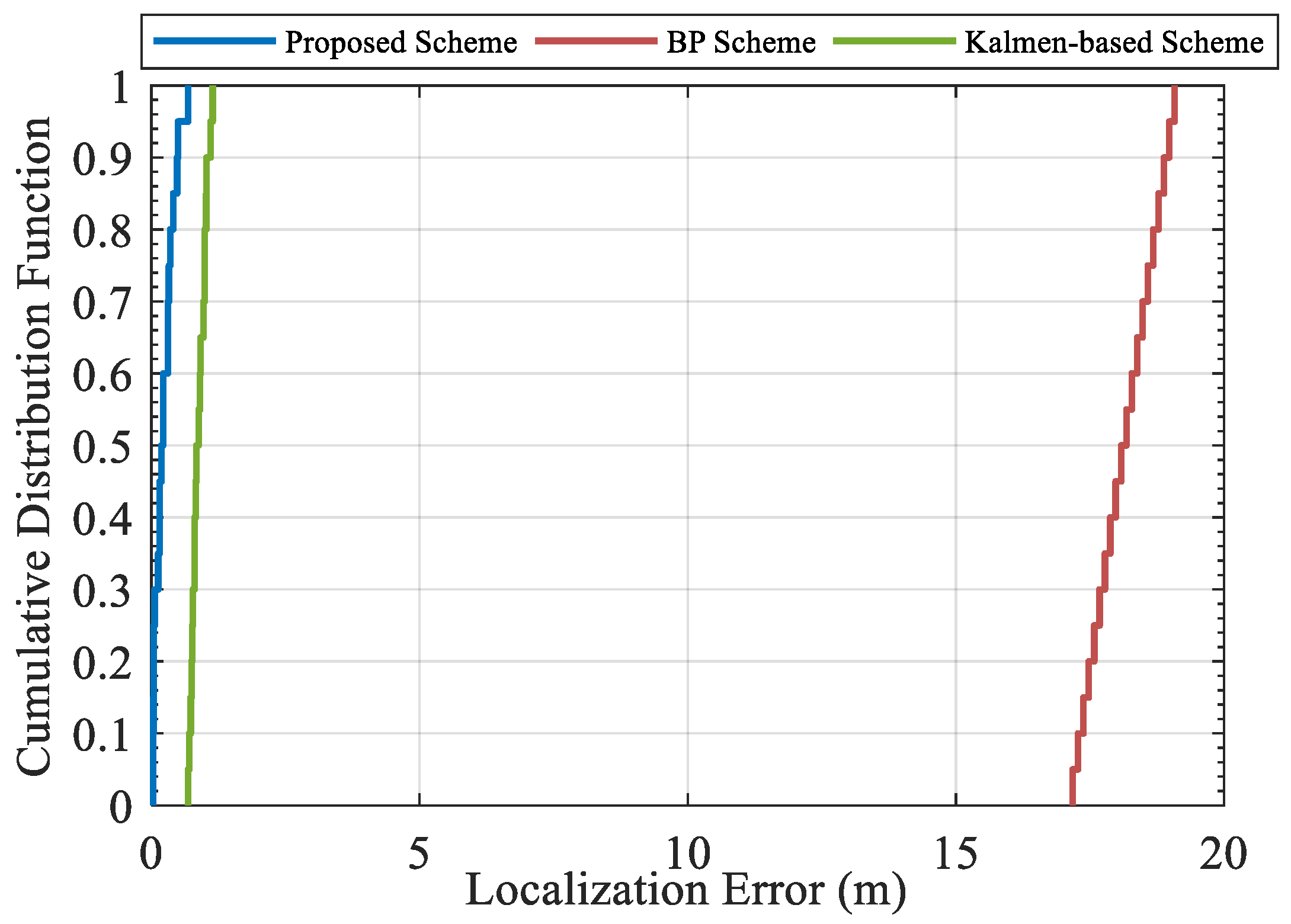
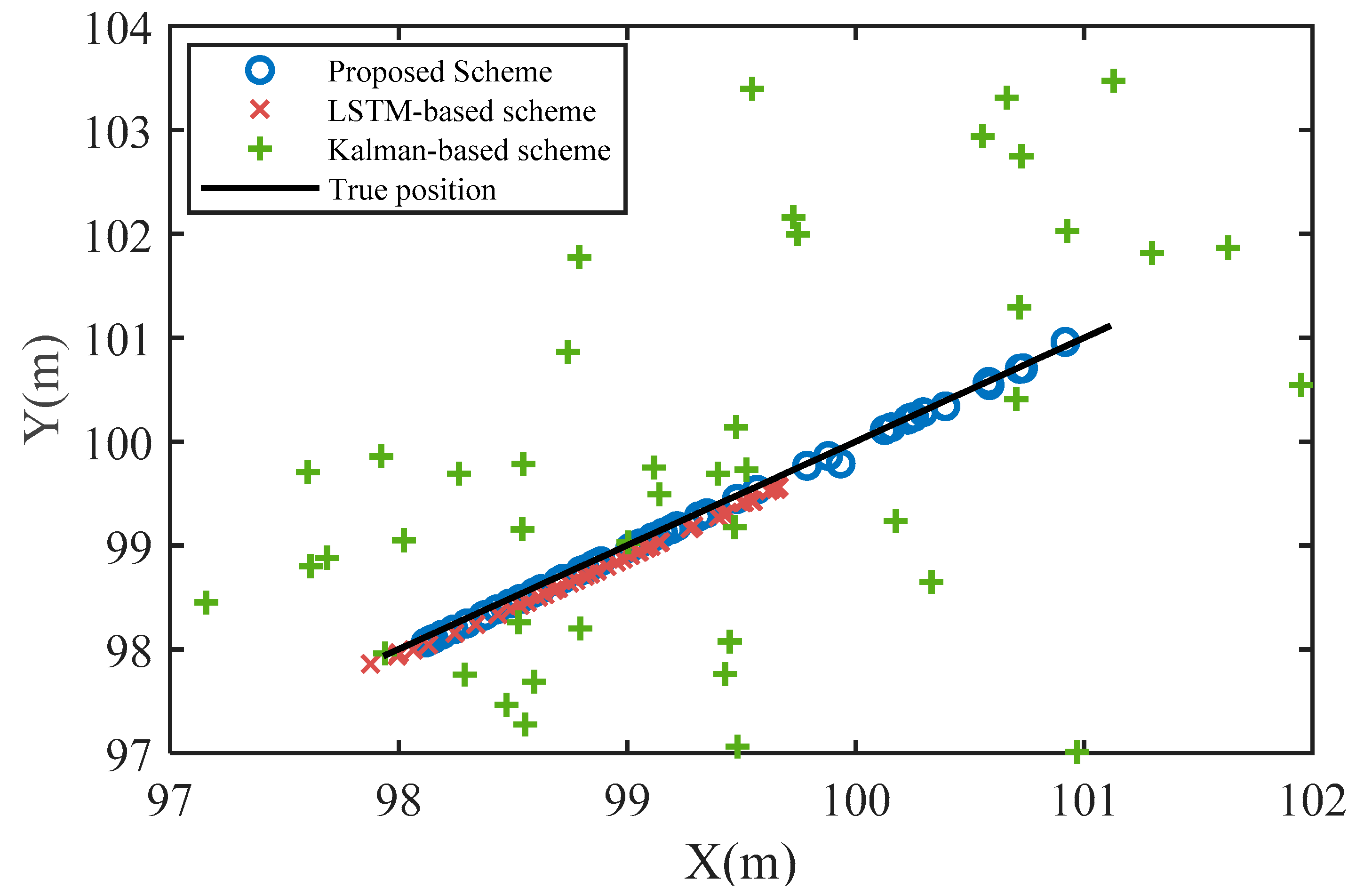
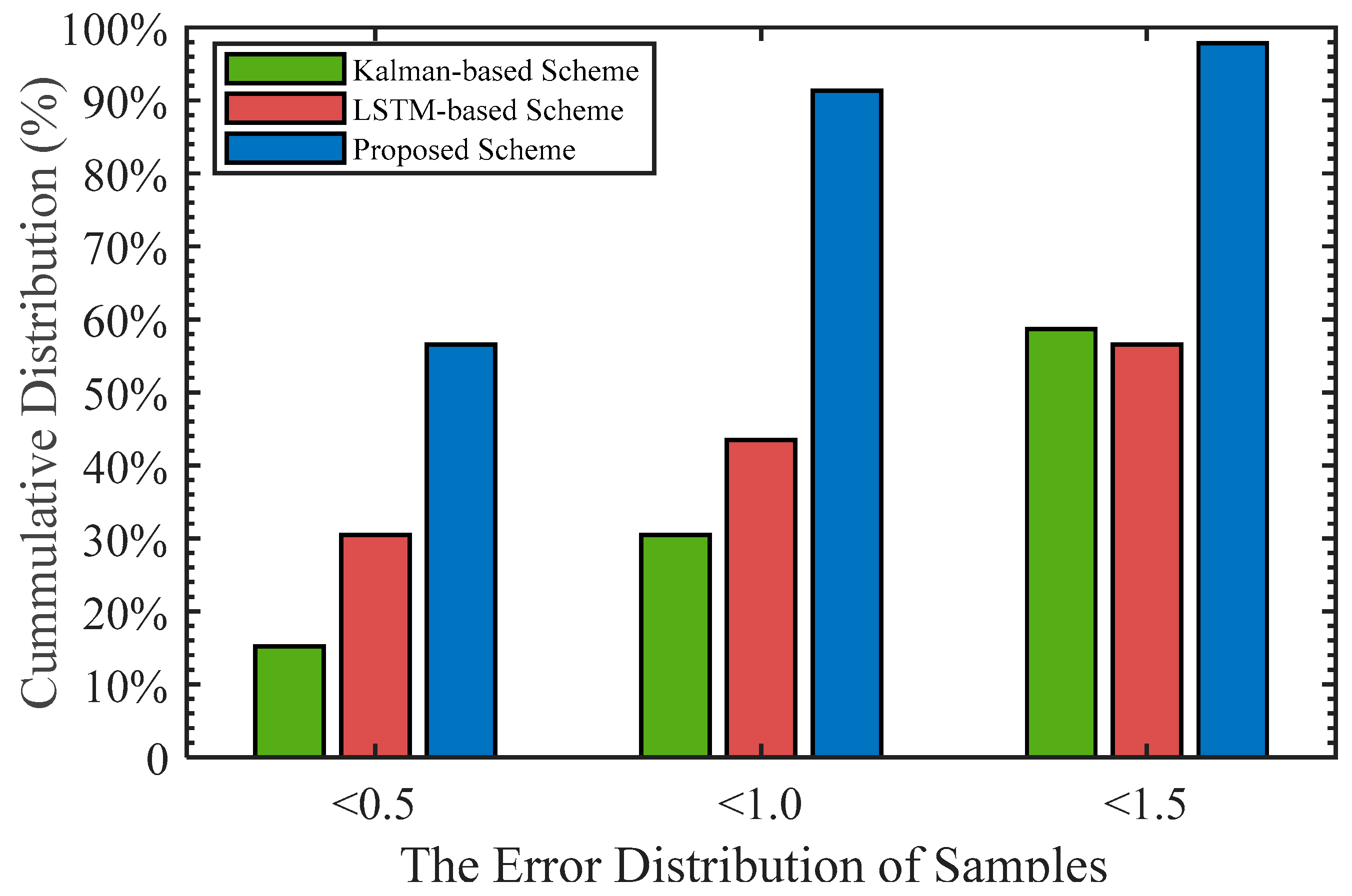
4.1. Analysis of the Localization Scheme
4.2. Impact of Sensor Performance on Localization Scheme
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chandra Shit, R. Crowd intelligence for sustainable futuristic intelligent transportation system: A review. IET Intell. Transp. Syst. 2020, 14, 480–494. [Google Scholar] [CrossRef]
- Wymeersch, H.; Seco-Granados, G.; Destino, G.; Dardari, D.; Tufvesson, F. 5G mmWave Positioning for Vehicular Networks. IEEE Wire. Commun. 2017, 24, 80–86. [Google Scholar] [CrossRef] [Green Version]
- Sharma, S.; Bhatia, V.; Gupta, A. Sparsity based narrowband interference mitigation in UWB communication for 5G and beyond. Elsevier Comput. Electr. Eng. 2017, 64, 83–95. [Google Scholar] [CrossRef]
- Sharma, S.; Bhatia, V.; Gupta, A. Joint Symbol and ToA Estimation for Iterative Transmitted Reference Pulse Cluster UWB System. IEEE Syst. J. 2019, 13, 2629–2640. [Google Scholar] [CrossRef]
- Va, V.; Shimizu, T.; Bansal, G.; Heath, R.W. Millimeter Wave Vehicular Communications: A Survey. Found. Trends Netw. 2016, 10, 1–113. [Google Scholar] [CrossRef]
- Piccinni, G.; Avitabile, G.; Coviello, G. An improved technique based on Zadoff-Chu sequences for distance measurements. In Proceedings of the 2016 IEEE Radio and Antenna Days of the Indian Ocean (RADIO), Reunion, France, 10–13 October 2016. [Google Scholar]
- Fadzilla, M.A.; Harun, A.; Shahriman, A.B. Localization Assessment for Asset Tracking Deployment by Comparing an Indoor Localization System with a Possible Outdoor Localization System. In Proceedings of the 2018 International Conference on Computational Approach in Smart Systems Design and Applications (ICASSDA), Kuching, Malaysia, 15–17 August 2018. [Google Scholar]
- Ammous, M.; Valaee, S. Cooperative Positioning in Vehicular Networks using Angle of Arrival Estimation through mmWave. In Proceedings of the GLOBECOM, Madrid, Spain, 7–11 December 2020. [Google Scholar]
- Soatti, G.; Nicoli, M.; Garcia, N.; Denis, B.; Raulefs, R.; Wymeersch, H. Implicit Cooperative Positioning in Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3964–3980. [Google Scholar] [CrossRef] [Green Version]
- Seco, F.; Jiménez, A.; Zheng, X. RFID-based centralized cooperative localization in indoor environments. In Proceedings of the IPIN 2016: International Conference on Indoor Positioning and Indoor Navigation, Madrid, Spain, 4–7 October 2016. [Google Scholar]
- Ihler, A.T.; Fisher, J.W.; Moses, R.L.; Willsky, A.S. Nonparametric belief propagation for self-localization of sensor networks. In Proceedings of the 3rd International Symposium on Information Processing in Sensor Networks, Berkeley, CA, USA, 26–27 April 2004. [Google Scholar]
- Wymeersch, H.; Lien, J.; Win, M.Z. Cooperative Localization in Wireless Networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Pedersen, C.; Pedersen, T.; Fleury, B.H. A Variational Message Passing Algorithm for Sensor Self-Localization in Wireless Networks. In Proceedings of the IEEE International Symposium on Information Theory Proceedings (ISIT), St Petersburg, Russia, 31 July–5 August 2011. [Google Scholar]
- Garcia-Fernandez, A.F.; Svensson, L.; Sarkka, S. Cooperative Localization Using Posterior Linearization Belief Propagation. IEEE Trans. Veh. Technol. 2018, 67, 832–836. [Google Scholar] [CrossRef]
- Cakmak, B.; Urup, D.N.; Meyer, F.; Pedersen, T.; Fleury, B.H.; Hlawatsch, F. Cooperative Localization for Mobile Networks: A Distributed Belief Propagation—Mean Field Message Passing Algorithm. IEEE Signal Process. Lett. 2016, 23, 828–832. [Google Scholar] [CrossRef] [Green Version]
- Hehdly, K.; Laaraiedh, M.; Abdelkefi, F.; Siala, M. Cooperative localization and tracking in wireless sensor networks. Int. J. Commun. Syst. 2018, 32, e3842. [Google Scholar] [CrossRef] [Green Version]
- Meyer, F.; Hlinka, O.; Wymeersch, H.; Riegler, E.; Hlawatsch, F. Distributed Localization and Tracking of Mobile Networks Including Noncooperative Objects. IEEE Trans. Signal Inform. Process. Netw. 2016, 2, 57–71. [Google Scholar] [CrossRef] [Green Version]
- Meyer, F.; Riegler, E.; Hlinka, O.; Hlawatsch, F. Simultaneous Distributed Sensor Self-Localization and Target Tracking Using Belief Propagation and Likelihood Consensus. In Proceedings of the 2012 Conference Record of The Forty Sixth Asilomar Conference on Signals, Systems and Computers (ASILOMAR), Pacific Grove, CA, USA, 4–7 November 2012. [Google Scholar]
- Meyer, F.; Hlawatsch, F.; Wymeersch, H. Cooperative simultaneous localization and tracking (coslat) with reduced complexity and communication. In Proceedings of the ICASSP, Pacific Grove, CA, USA, 4–7 November 2012. [Google Scholar]
- Eom, J.; Kim, H.; Lee, S.H.; Kim, S. DNN-Assisted Cooperative Localization in Vehicular Networks. Energies 2019, 12, 2758. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Granstrom, K.; Gao, L.; Battistelli, G.; Kim, S.; Wymeersch, H. 5G mmWave Cooperative Positioning and Mapping using Multi-Model PHD Filter and Map Fusion. IEEE Trans. Wirel. Commun. 2019, 16, 3782–3795. [Google Scholar] [CrossRef] [Green Version]
- Denis, B.; Maman, M.; Ouvry, L. On the scheduling of ranging and distributed positioning updates in cooperative IR-UWB networks. In Proceedings of the IEEE International Conference on Ultra-Wideband, Vancouver, BC, Canada, 9–11 September 2009. [Google Scholar]
- Zhang, R.; Zhao, Z.; Cheng, X.; Yang, L. Overlapping Coalition Formation Game Based Opportunistic Cooperative Localization Schemefor Wireless Networks. IEEE Trans. Commun. 2017, 65, 3629–3642. [Google Scholar]
- Sathyan, T.; Hedley, M. Fast and Accurate Cooperative Tracking in Wireless Networks. IEEE Trans. Mob. Comput. 2013, 12, 1801–1813. [Google Scholar] [CrossRef]
- Tian, Q.; Wang, K.I.-K.; Salcic, Z. A Resetting Approach for INS and UWB Sensor Fusion Using Particle Filter for Pedestrian Tracking. IEEE Trans. Instrum. Meas. 2020, 69, 5914–5921. [Google Scholar] [CrossRef]
- Tian, Q.; Wang, K.I.-K.; Salcic, Z. An INS and UWB Fusion Approach with Adaptive Ranging Error Mitigation for Pedestrian Tracking. IEEE Sens. J. 2020, 20, 4372–4381. [Google Scholar] [CrossRef]
- Alvarez-Merino, C.S.; Luo-Chen, H.Q.; Khatib, E.J.; Barco, R. Opportunistic Fusion of Ranges from Different Sources for Indoor Positioning. IEEE Commun. Lett. 2021, 25, 2260–2264. [Google Scholar] [CrossRef]
- Zhang, M.; Jia, J.; Chen, J.; Deng, Y.; Wang, X.; Aghvami, A.H. Indoor Localization Fusing WiFi with Smartphone Inertial Sensors Using LSTM Networks. IEEE Internet Things J. 2021, 8, 13608–13623. [Google Scholar] [CrossRef]
- Llinas, J.; Antony, R.T. Blackboard Concepts for Data Fusion Applications. Int. J. Pattern Recognit. Artif. Intell. 1993, 7, 285–308. [Google Scholar] [CrossRef]
- Graves, A.; Schmidhuber, J. Framewise phoneme classification with bidirectional LSTM and other neural network architectures. Neural Netw. 2005, 18, 602–610. [Google Scholar] [CrossRef] [PubMed]
- Greff, K.; Srivastava, R.K.; Koutník, J.; Steunebrink, B.R.; Schmidhuber, J. LSTM: A Search Space Odyssey. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 2222–2232. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Omkar, S.; Khandelwal, R.; Ananth, T.; Naik, G.N.; Gopalakrishnan, S. Quantum behaved Particle Swarm Optimization (QPSO) for multi-objective design optimization of composite structures. Expert Syst. Appl. Int. J. 2009, 36, 11312–11322. [Google Scholar] [CrossRef]
- Sun, J.; Xu, W.; Feng, B. A global search strategy of quantum-behaved particle swarm optimization. In Proceedings of the IEEE Conference on Cybernetics and Intelligent Systems, Singapore, 1–3 December 2004. [Google Scholar]
- Sharma, S.; Gupta, A.; Bhatia, V. IR-UWB Sensor Network Using Massive MIMO Decision Fusion: Design and Performance Analysis. IEEE Sens. J. 2018, 18, 6290–6302. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 5G | Vehicle Information | |
|---|---|---|
| Sensor 1 | Angle, Time, Position | - |
| Sensor 2 | - | Velocity |
| Hidden Layer 1 | Hidden Layer 2 | Learning Rate | Max Epochs | |
|---|---|---|---|---|
| maximum | 250 | 250 | 0.1 | 200 |
| minimum | 1 | 1 | 0.001 | 1 |
| The Standard Input | Without the
Angle Sensor | Without the Speed Sensor | With Poor
Speed Sensor | |
|---|---|---|---|---|
| RMSE | 0.4188 m | 0.4369 m | 0.4454 m | 0.4347 m |
| 20 Hz | 10 Hz | 8 Hz | |
|---|---|---|---|
| RMSE | 0.4188 m | 0.4369 m | 0.4454 m |
| Kalman-Based | LSTM-Based | Proposed Scheme | |
|---|---|---|---|
| RMSE | 1.0946 m | 0.9030 m | 0.3628 m |
| MAE | 1.5717 m | 1.2682 m | 0.5102 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, T.; Zou, D.; Lu, X.; Bi, C. A Multisensor Fusion-Based Cooperative Localization Scheme in Vehicle Networks. Electronics 2022, 11, 603. https://doi.org/10.3390/electronics11040603
Yin T, Zou D, Lu X, Bi C. A Multisensor Fusion-Based Cooperative Localization Scheme in Vehicle Networks. Electronics. 2022; 11(4):603. https://doi.org/10.3390/electronics11040603
Chicago/Turabian StyleYin, Ting, Decai Zou, Xiaochun Lu, and Cheng Bi. 2022. "A Multisensor Fusion-Based Cooperative Localization Scheme in Vehicle Networks" Electronics 11, no. 4: 603. https://doi.org/10.3390/electronics11040603
APA StyleYin, T., Zou, D., Lu, X., & Bi, C. (2022). A Multisensor Fusion-Based Cooperative Localization Scheme in Vehicle Networks. Electronics, 11(4), 603. https://doi.org/10.3390/electronics11040603