1. Introduction
Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) communications play a vital role in building an Intelligent transportation system in Vehicular ad hoc networks (VANETs) [
1,
2]. The vehicles and infrastructure communicate and exchange important information about the traffic situations, road conditions, and many more [
3,
4]. This information helps autonomous vehicles to make decisions dynamically and avoid potentially dangerous conditions. Furthermore, utilizing V2V and V2I concepts in smart cities will enhance the safety of the vehicle on the roads as well as optimize the flow of traffic [
5,
6,
7].
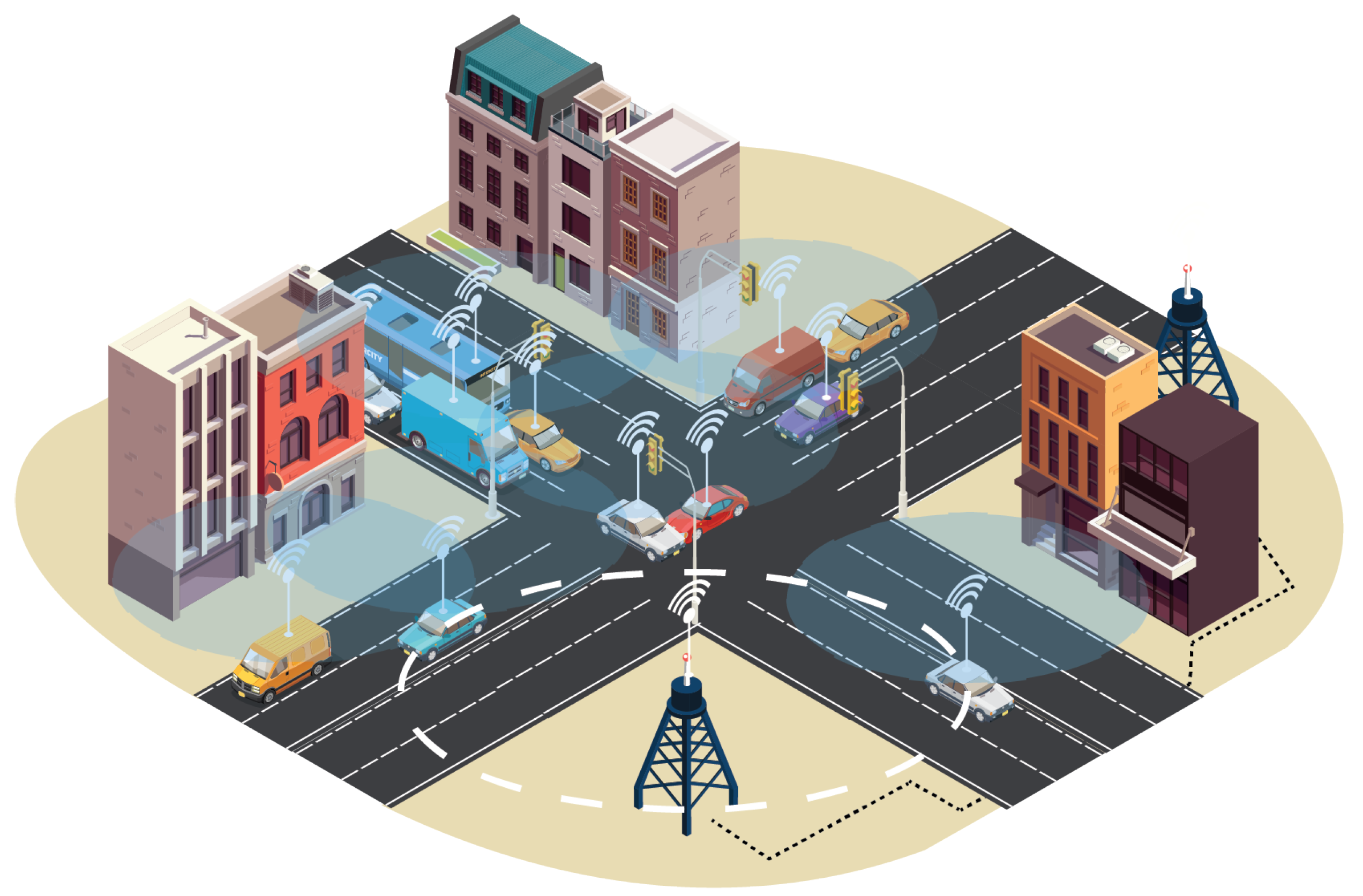
Figure 1 describes a VANET of a smart city environment with V2I and V2V wireless ad hoc communication. Vehicles transmit and relay packets across the network informing of incidents, such as accident scenarios, at specific locations. The ad hoc protocols employed by the literature and this work proactively or reactively send out packets to the nearest neighbors based on the communication range and antenna. The figure further elaborates on the V2I concept in the VANET environment, where a base station node with a larger communication range receives the relayed packet and forwards it to vehicles further away or via cable to other entities in the network.
The concurrent presence of human-driven and fully automated vehicles on a road network poses new research challenges. Especially in the case that this type of mixed fleet needs to cooperate under a real-life urban or extra-urban environment [
8,
9]. The key challenge in these environments is traffic congestion, a regular phenomenon, which causes dynamic changes in the environment and in the decisions the automated vehicles will make (lane blockage, delays, illegal parking, short-time cars’ stops) to be self-navigated within the urban area [
10,
11]. To make things worse, the coexistence of heavy pedestrian traffic and adverse weather conditions, such as heavy rain, extreme heat, strong winds, and hail, can make the co-presence of conventional (human-driven) and automated vehicles even more challenging [
12]. We need to find a way that will not lead to an increase in the traffic jam due to this necessary cooperation of the two different types of vehicle fleets. Traffic congestion induces serious infrastructure degradation in metropolitan areas. Considering that malfunction cooperation among conventional and automated vehicles can increase traffic jams and consequently the cost, it is clear that civil infrastructures should be equipped with novel sensors and software tools to enable cooperative functionality among the conventional and automated vehicles [
13].
For the seamless coexistence of automated and conventional vehicles, it is clear that new signaling and traffic management methods are required. These methods should be dynamic and adapted according to the real-time traffic flow conditions, which will allow for increased efficiency. In this paper, we develop wireless communication between Vehicles and Infrastructure. Both human-driven and autonomous vehicles will need to wirelessly communicate with each other: Vehicle-to-Vehicle and with the surrounding road infrastructure (V2I). The transportation network utilizes traffic modeling and available data to simulate the future state. First, we use OpenStreetMap (OSM) [
14,
15] to extract the roads network map of Madinah city. Next, we use the Simulation of Urban MObility (SUMO) [
16,
17] traffic modeling tool to generate various traffic scenarios for our simulation. We select OMNeT++ [
18,
19] as the network simulation platform in our study and import the Madinah city map as well as SUMO-generated traffic scenarios to perform simulations and obtain the results. For this study, we select three routing protocols, including Ad hoc On-Demand Distance Vector (AODV) [
20,
21], Destination Sequenced Distance Vector (DSDV) [
22,
23], and Dynamic Manet on Demand (DYMO) [
24,
25,
26,
27], which are discussed later. This study takes into account the conditions of the city of Madinah, especially at peak times of Hajj and Umrah. To the best of our knowledge, very few works are conducted on autonomous vehicles in the Kingdom of Saudi Arabia.
The contribution of our work is as follows:
We study the effect of different routing protocols in VANET communication systems. Two types of routing protocols (proactive and reactive) are considered, and a performance evaluation is conducted of the VANET system under varying traffic scenarios.
Furthermore, we demonstrated the effect of various populations of autonomous to human-driven vehicles in the smart city by analyzing the impact of the introduction of autonomous vehicles on the trip times of the vehicles in the VANET scenario.
Finally, we evaluated the main factors that influence the performance of the VANET system through the analysis of variance (ANOVA) test, and our study illustrated the contrasting influence of the factors captured on multiple metrics in a smart city simulation.
The organization of this paper is as follows:
Section 2 provides a brief summary of recent studies, while
Section 3 provides a detailed methodology of our work.
Section 4 explains the simulation details and various test scenarios we considered in our study.
Section 5 elaborates and analyzes the results and findings of our simulation. Lastly, the conclusion is presented in
Section 6.
2. Related Works
There are various research areas in the VANET domain [
28]. We focus on the communication aspects of VANETs. Tremendous work regarding the communication routing protocols for VANETs is studied. The authors in [
29] discuss the details of the protocol stack, application, and challenges of VANET. In [
30], the authors classify the routing protocols based on the type of architecture and mode of operation. They discuss the features of the current known routing protocols and how bio-inspired protocols can improve the performance of the routing process. Several factors might affect the performance of the routing protocols. Hence, the authors conclude that depending on the VANET application, the routing protocol needs to be designed or tailored.
The authors in [
31] evaluate the performance of AODV and Dynamic Source Routing (DSR) [
32,
33] routing protocols in VANET with dense and sparse car traffic density. The simulation was carried out in the OPNET Network Simulator [
34] using IEEE 802.11b standard [
35] to study the impact on VANET. The Packet Delivery Ratio (PDR), throughput, and end-to-end delay were the performance metrics used for the study, and the authors concluded that AODV was better in dense traffic density. However, the authors only considered reactive routing protocols in their analysis.
Another study [
36] analyzed the performance of DSR, AODV, and DSDV routing protocols in terms of PDR, average throughput, delay, and total energy under high traffic density. The authors compared the performance of the routing protocols in a highly congested area of Khartoum to find out the most suitable routing protocol. Regardless, the authors did not consider different traffic scenarios or routes that might affect the performance. In [
37], the authors studied the performance of AODV, DSR, and DSDV routing protocols in terms of PDR, throughput, and Normalized Routing Load (NRL) as performance metrics. The intended map of the city of Casablanca was generated using OSM, and the mobility model was created using SUMO. Simulations were run using the Network Simulator 2 (NS-2) [
38] tool with a high traffic density. The authors concluded that the AODV protocol outperforms DSR and DSDV protocols under a heavy traffic load. However, the authors did not consider different traffic scenarios and the autonomy of vehicles in VANET systems.
Ghori et al. [
39] studied several routing protocols to identify the most suitable protocol for video streaming in VANET. They classified and examined the routing protocols and discussed the pros and cons of each routing protocol. The authors evaluated the performance of AODV and DSR routing protocols in terms of throughput and delay using OPNET as the network simulation tool. Road-side Units (RSUs) [
40] were used to simulate a complex traffic scenario, and the authors concluded that AODV is the best routing protocol for VANET. However, the authors did not consider any proactive routing protocols in their study. The researchers in [
41] analyzed AODV, Optimized Link State Routing Protocol (OLSR) [
42], and DSDV routing protocols in terms of PDR, goodput, routing overhead, and end-to-end delay as performance metrics under different node densities and velocities. The mobility model was generated using the BonnMotion tool [
43], and the simulation was carried out in NS-3 [
44]. The authors concluded that the OLSR routing protocol performs best in their scenario. Nonetheless, the authors did not consider a more realistic scenario with traffic lights, etc. Additionally, they did not consider high node density in their study.
The authors in [
45] present a detailed classification of the routing protocols in VANET with their benefits and drawbacks. They simulate a VANET environment of Oujda city using OSM, SUMO, and NS-3 tools to compare the topology-based and position-based routing protocols. The performance of DSDV, AODV, Greedy Perimeter Stateless Routing (GPSR) [
46], OLSR, and Greedy Perimeter Coordinator Routing (GPCR) [
47] routing protocols are evaluated in terms of PDR, end-to-end delay, throughput, and routing overhead by varying the node density. The authors observe that the OLSR protocol outperforms other protocols in terms of PDR and throughput. GPSR and GPCR protocols perform better concerning the routing overhead and end-to-end delay. Additionally, the authors propose a new greedy forwarding technique based on the angle direction, speed variation, density, and distance to the next-hop node to improve the GPSR and GPCR protocols. However, no simulation was conducted based on the proposed technique. Furthermore, the authors did not consider autonomous traffic distribution in their traffic scenarios.
Shi et al. [
48] evaluate the performance of two communication technologies, including 802.11p and LTE-V, in the V2X scenario. The authors consider a scenario where the vehicles communicate an accident at an intersection. To perform the experiments, the authors deploy two vehicles in a real-world test field, which communicate with each other using 802.11p and LTE-V technologies. The Packet Delivery Ratio (PDR) and latency are selected as two performance metrics. From the results, the authors conclude that 802.11p provides much lower latency compared to LTE-V; however, the PDR of LTE-V is much better. Nevertheless, the study only provides a small-scale deployment and does not provide an extensive comparison between the two technologies. Furthermore, the implementation scenario is oversimplified in this study.
The authors of [
49] conduct a performance evaluation of routing protocols for VANETs using a simulation system called Cellular Automaton-based VEhicular NETwork (CAVENET). CAVENET generates mobility behavior in one-dimensional cellular automata, and the network is simulated on NS-2. They implemented two reactive routing protocols, AODV and DYMO, and one proactive routing protocol, OSLR. Packet delivery ratio is used as the primary evaluation metric between the protocols. They claim that DYMO is the best routing protocol because of its route maintenance ability. Their simulation is limited as it only considers 30 nodes from a 10 to 90 s simulation time. Further, only two nodes can deliver the majority of the packets, while some cannot deliver any packet at all because of disappearing routes over multi-hop communication, and the PDR is dependent on the number of hops in this simulation, not the routing protocol.
García-Campos et al. [
50] perform a comparison study of ad hoc reactive routing protocols for VANETs in urban settings. The routing protocols studied were AODV, DSR, DYMO, and Location-Aided Routing (LAR) [
51], and the MAC protocol used was IEEE 802.11p. The performance evaluation was conducted on the ns-2 simulator for the network simulation and BonnMotion for the mobility generator. The number of nodes in the VANET ranged up to a maximum of 175 with increments of 25 vehicles. Performance metrics captured were throughput, end-to-end delay, max. route activity time, number of hops, jitter, and more. Their results show that Dymo and AODV perform best for the jitter metric, Dymo for route activity time, and LAR for the remaining metrics. Their study is limited in that only one distribution of vehicles are used, and they only scale the traffic to 175 nodes.
3. Methodology
3.1. OpenStreetMap
The map of Madinah city was exported with the OpenStreetMap tool—an open-source geographic database of the world.
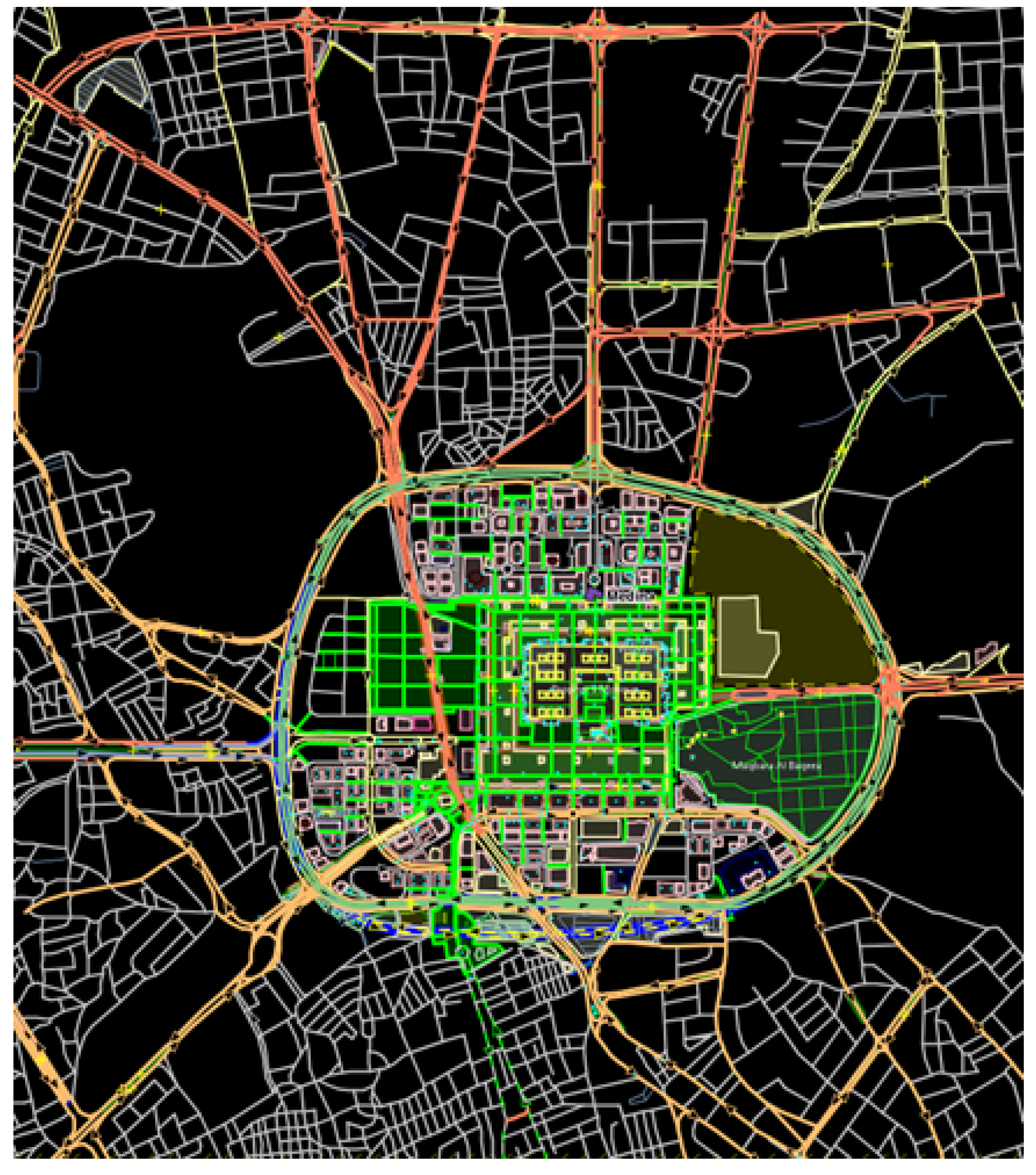
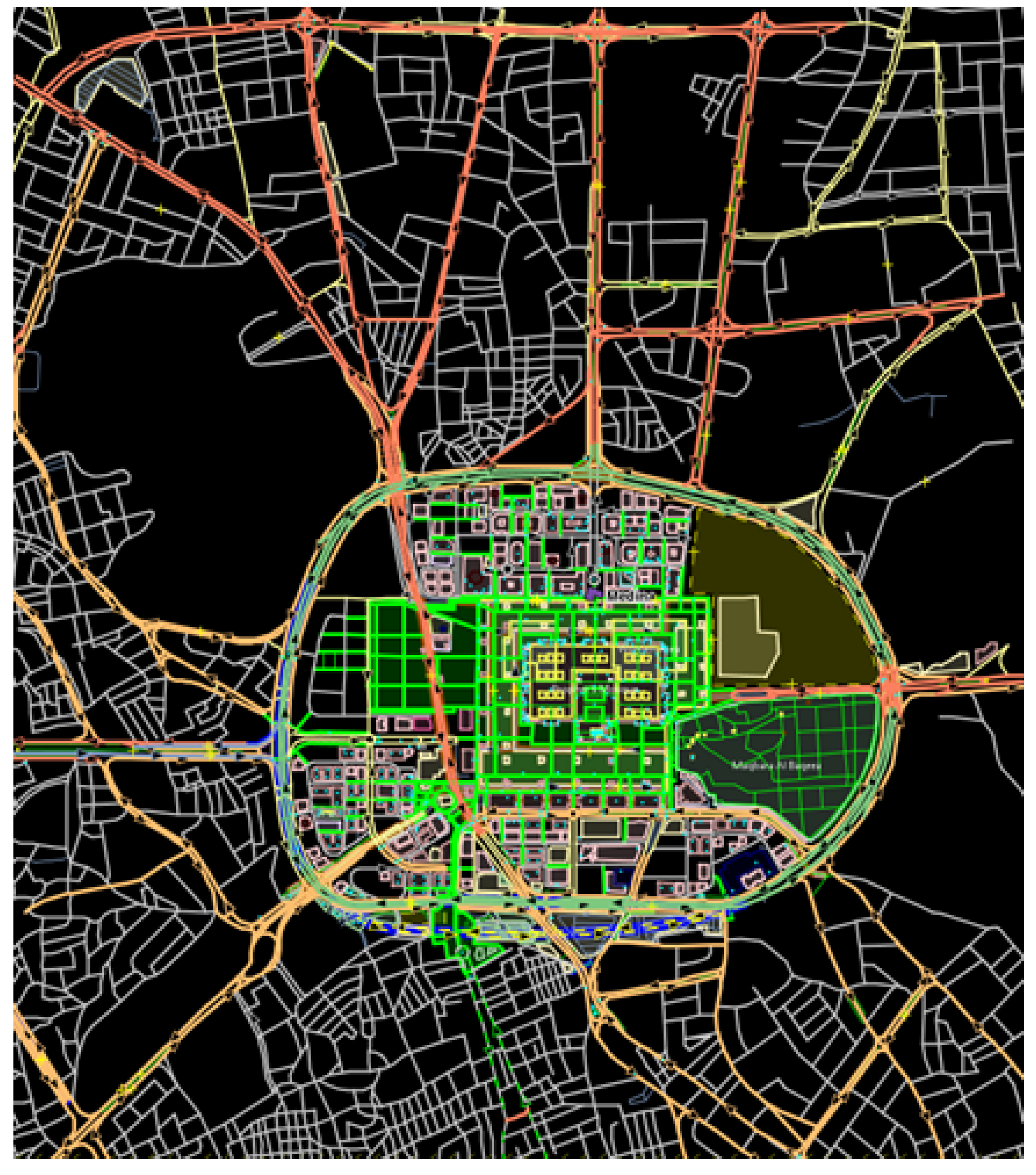
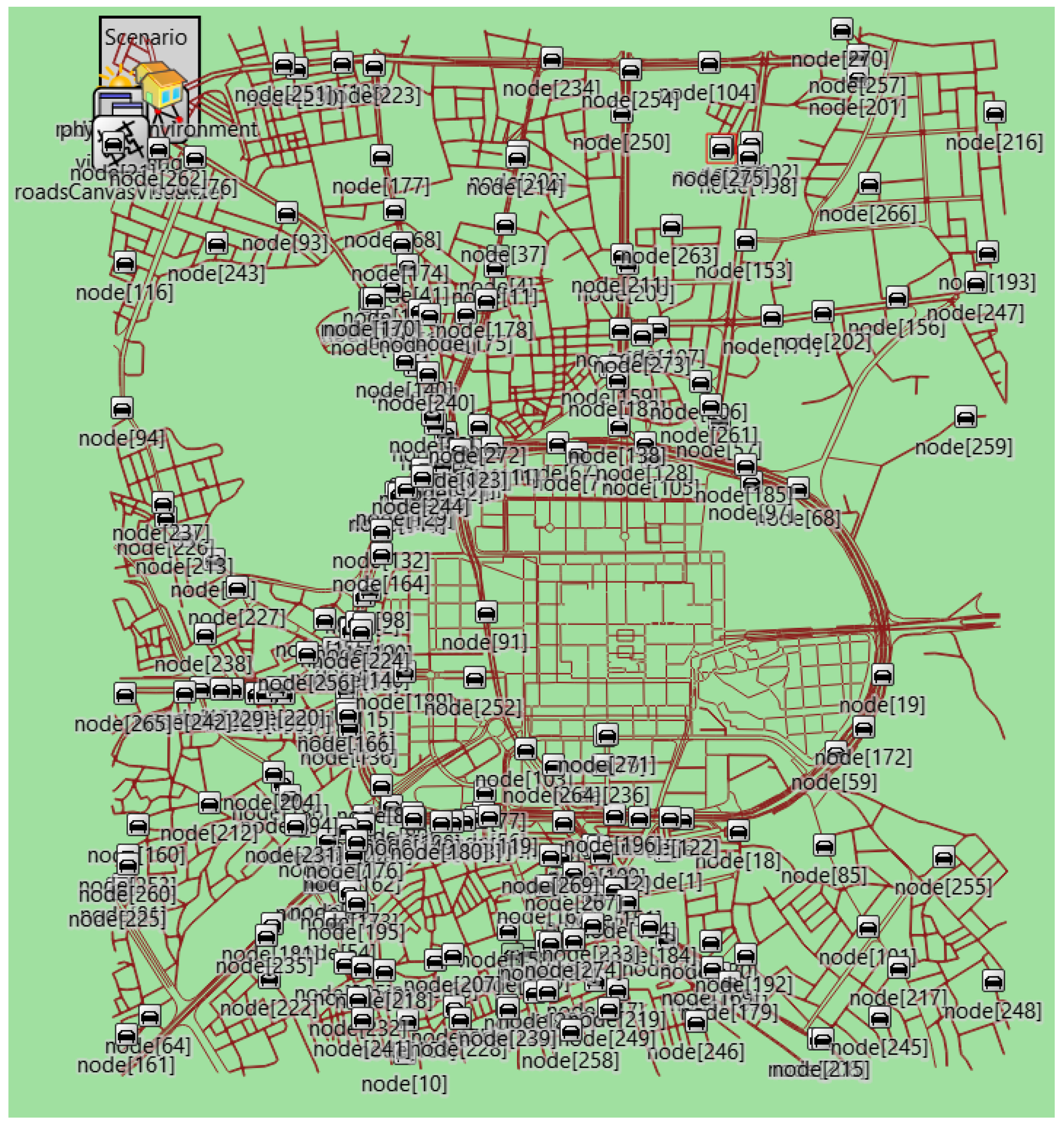
Figure 2 shows the extracted map on the Java OpenStreetMap Editor (JOSM), a java tool to inspect and edit OSM maps. From this tool, ID extraction is possible of the edges (roads) and their connections to create custom trip routes of vehicles traveling from points of interest to the Prophet’s Mosque in the center of the exported map.
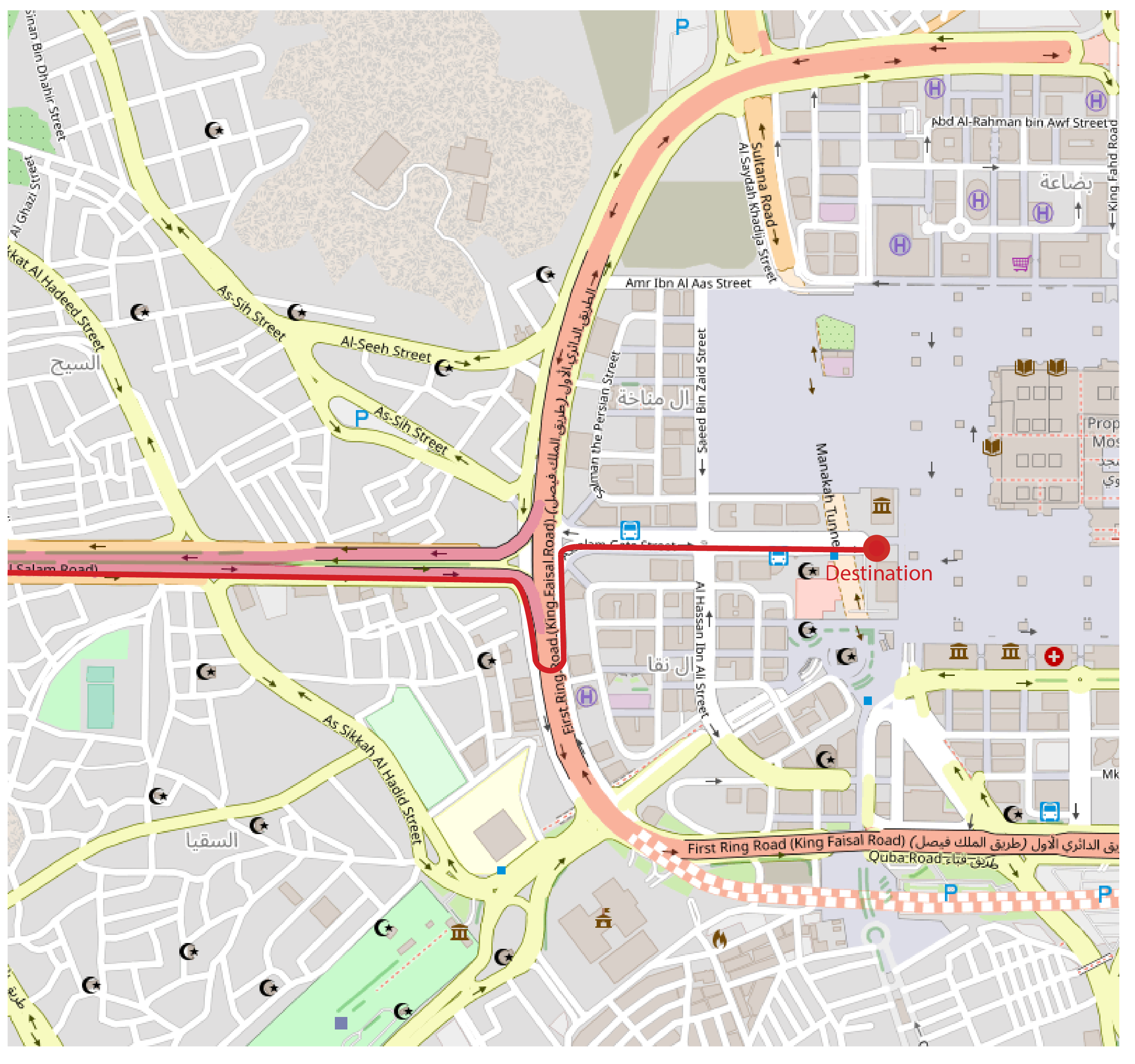
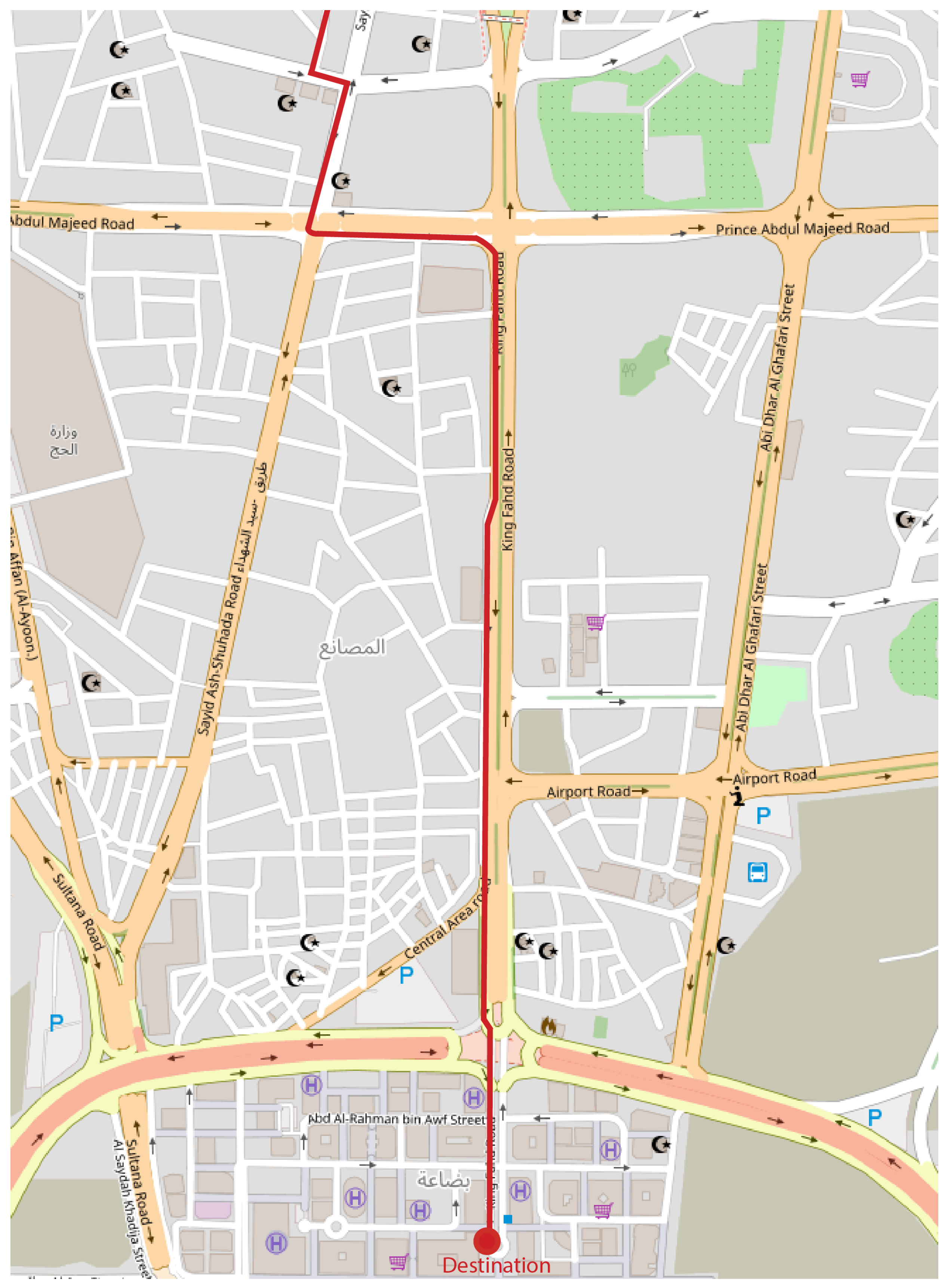
The selection criteria comprised of factors such as the inclusion of main highway routes towards the center, the Prophet’s Mosque. These highways connect to a primary Ring Road that encircles the point of interest in the center of the city. In addition to all the highway routes, the roads within the encircling Ring Road need to be included as passenger vehicle trips end near the hotels at this location or the drop-off points near the mosque.
Some of these highways connecting to the Ring Road are primary sources of external traffic towards the city. For example, the west and south-west highways are the primary routes for traffic entering the city for pilgrims coming from Makkah city via road and from the main hub airport for the Hijaz region and pilgrims traveling to the country, King Abdulaziz International Airport (KAIA). In addition, the eastern highway welcomes visitors from the Madinah train station, the final stop for the high-speed haramain railway project connecting Makkah, Jeddah (KAIA airport), and King Abdullah Economic City (KAEC).
3.2. Simulators and Frameworks
A combination of a traffic simulation tool and a network simulation tool was used to model the traffic behavior and communication of autonomous and human-driven vehicles in Madinah city. The network simulator imported the traffic data generated on the traffic simulator to perform VANET communication in each scenario tested. The traffic simulator created a variety of traffic situations to match the traffic patterns of the population densities in Madinah city.
3.2.1. Simulation of Urban MObility (SUMO)
SUMO is an open-source traffic modeling simulation tool developed by the German Aerospace Center, now maintained by the Eclipse Foundation. SUMO enables researchers to model road traffic and traffic management systems and to perform in-depth analysis prior to launching the solution in real-world scenarios. In addition to road traffic comprising autonomous and human-driven vehicles, SUMO is capable of simulating public transportation and pedestrians.
SUMO provides a variety of tools with the ability to generate, execute, and evaluate traffic simulations that involve the importing or creation of road networks, route calculations with given parameters and constraints, visualization of the traffic, and emissions cost of each trip for the vehicles.
SUMO has been used in prior research projects to conduct a variety of application studies with a diverse set of research questions and objectives. Examples include an evaluation of proposed algorithms for traffic light control systems to improve vehicle throughput and reduce waiting times, artificial intelligence (AI) training of traffic light schedules, traffic effects of autonomous vehicles, simulation of traffic parking scenarios, and so on.
3.2.2. OMNeT++
OMNeT++ is a discrete-event simulation library and platform developed to perform network simulations. These network simulations can include anything from wired to wireless communication to domain-specific networks, such as wireless sensor networks, ad hoc networks, and so on. These networks are modeled using external framework projects and imported into the OMNeT++ simulator. INET [
52] is a popular framework that contains models for a diverse range of network protocols, such as IPv6, Border Gateway Protocol (BGP), and many Ad hoc routing protocols.
OMNeT++ employs a modular architecture for models, referred to as components. These components are written in C++ language and then integrated using higher-level language NEtwork Description (NED) into larger components or models. This modular architecture enables researchers to easily import and embed external models into the applications for simulation.
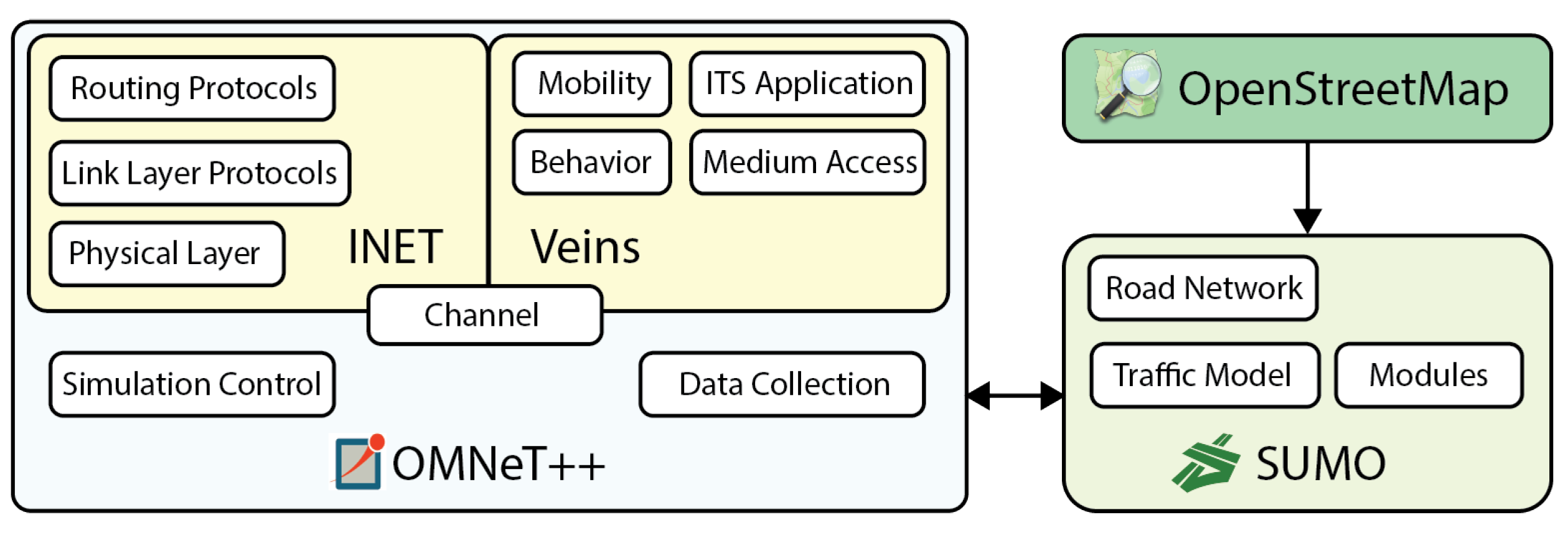
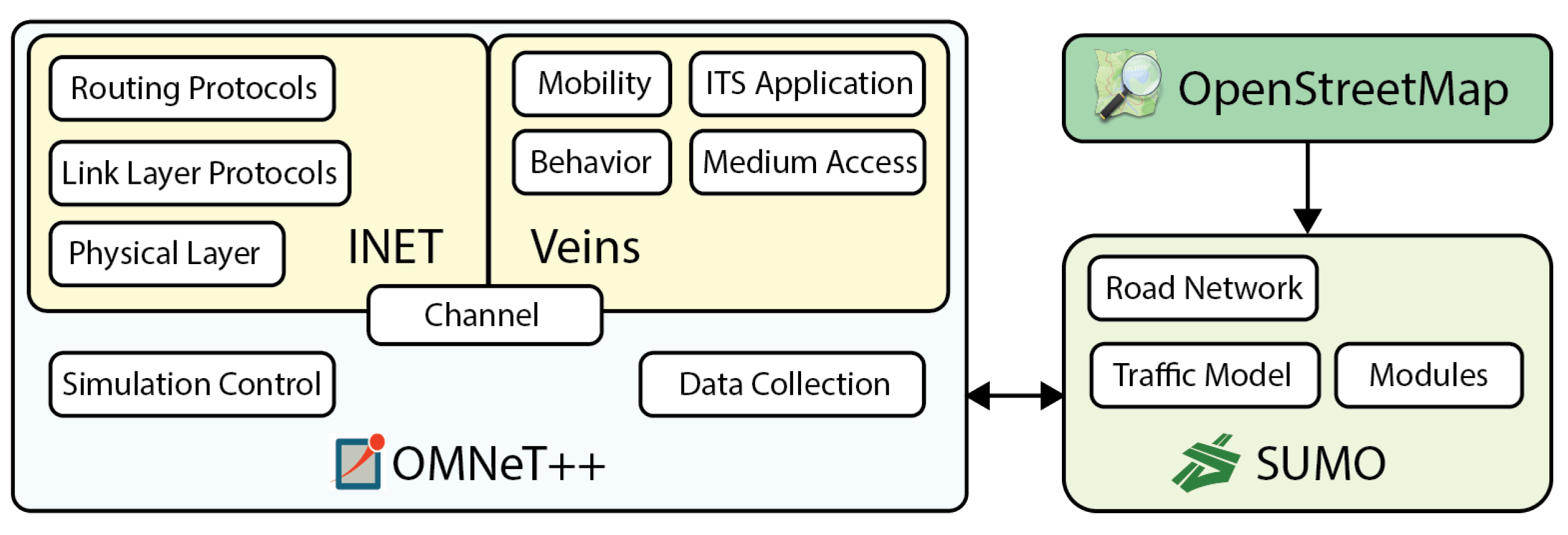
In this research, OMNeT++ is the core simulation platform, INET provides the communication libraries such as routing protocols and wireless technologies, while Vehicles in network simulation (Veins) [
53,
54] provides cars and road network libraries to create VANETs. All of this is performed within the specific traffic models generated by SUMO on the imported OSM map, as described by the system design in
Figure 3.
3.2.3. INET Framework
INET is an open-source framework model library for OMNeT++ network simulations designed for communication experiments. It consists of a variety of network protocols (e.g., Open Shortest Path First (OSPF), BGP), wired and wireless protocols for the data link layer (e.g., IEEE 802.11), mobility models, and numerous other models and components.
INET, such as OMNeT++, follows a modular design with the concept of modules communicating by passing messages using agents. These agents and protocols are the components that form the higher-level function of network devices, such as routers, switches, hosts, and other devices.
INET is used in this research to import and implement the link-layer protocol, IEEE 802.11p designed for VANETS, and the ad hoc routing protocols described later.
3.2.4. Veins
Veins is an open-source simulation framework for vehicular networking. The models provided by the framework libraries are imported into the OMNeT++ event-based simulation to interact with INET and SUMO to perform VANET communication simulation for a given road network and traffic characteristics.
The Veins framework provides a user-modifiable application-specific simulation code that enables researchers to tweak or adapt certain applications to their use-cases. In this research, Veins is used to simulate the VANET applications for the two test case scenarios performed in the simulation experiments described in detail later.
3.2.5. Simulation Process
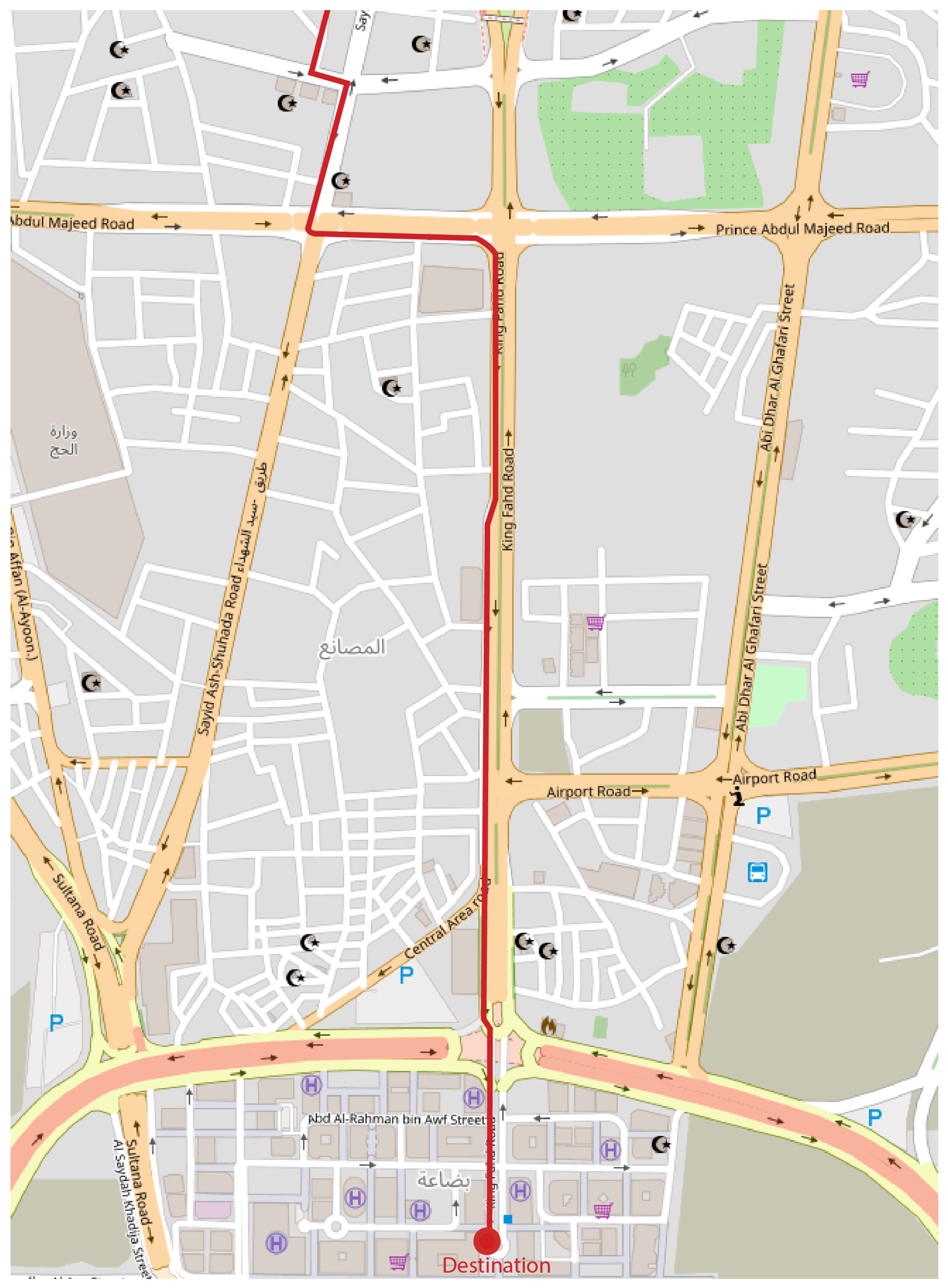
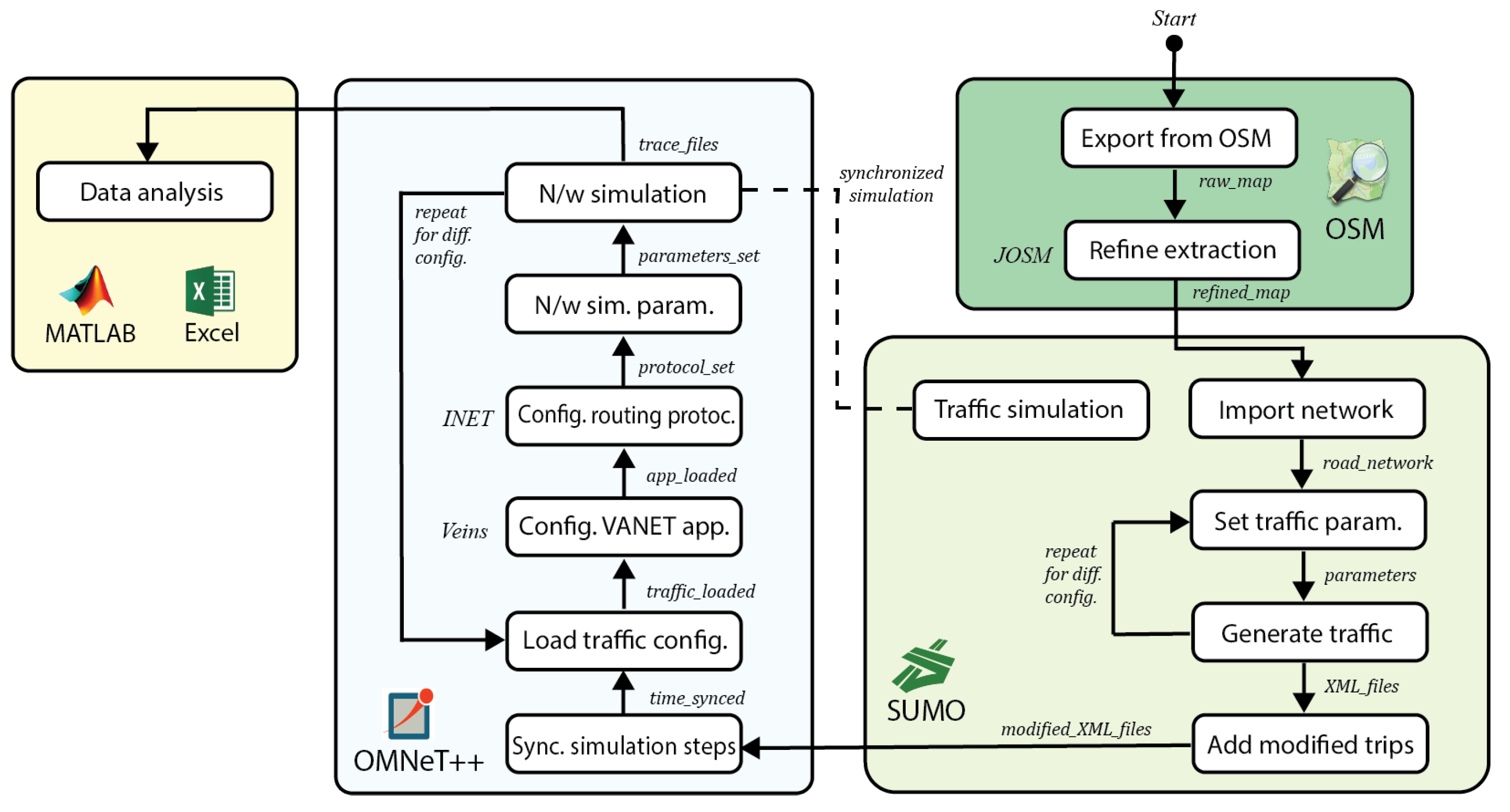
Figure 4 illustrates in further detail the steps that were taken to perform the simulation experiments between the various simulation platforms. The map extracted from the OSM platform is refined by correcting disjoint roads, missing paths, and other miscellaneous modifications. The refined map or road network is then imported into the SUMO traffic modeling tool. Traffic is generated based on the predefined parameters for various experiment configurations. The resulting set of XML files for the specific scenario is configured with a set of modified routes to measure the trip time performance measure—explained in further detail later. The set of XML files and a configuration file are imported into an OMNeT++ network simulator project where the simulation start and end times are defined in the OMNeT++ configuration file for synchronizing the simultaneous simulations. The configuration file requires the path to the XML files to load the traffic into the road network.
Two tweaks are made on the Veins imported libraries to enable the Veins VANET car to perform routing operations on network packets. The Veins accident scenario application is also modified, enabling Veins cars to propagate the accident packet to their neighbors within the communication range specified. The receiving cars further relay the packet until all vehicles in the network are aware of the accident packet. These modified Veins applications in tandem with the routing protocols provided by INET are loaded in runtime for each vehicle simulated by the SUMO simulator. The simulations are repeated for the various configurations designed for this evaluation. At the end of the simulation time, the trace files are extracted and saved for later data analysis.
3.3. Ad Hoc Routing Protocols
Several routing protocols are implemented in the INET framework. The target of this research is to compare topology-based routing protocols [
55] in certain traffic contexts. We chose the DSDV protocol as a proactive routing protocol. For the reactive routing protocol, we selected AODV and DYMO protocols for comparison.
Based on the Bellman–Ford algorithm [
56,
57], DSDV is a loop-free proactive routing protocol that maintains the routing table containing sequence numbers for each route in the network. A node will update its routing table when it receives a route update with a higher sequence number. If the route update has the same sequence number, a route with a better metric is selected. A periodic update of the routing tables is necessary for the DSDV protocol. Full dump or incremental update methods are used to perform the routing updates. In the full dump method, nodes transmit the whole routing table, whereas, in the incremental update, the node only transmits entries that have changed. Routing updates are broadcasted by either transmitting infrequent full dumps or frequent incremental updates. In a high dynamic topology, routing information needs to be updated more frequently, consuming more power.
Reactive protocols do not maintain routing information about all the nodes but rather only keep the information of the nodes that are present in the route. AODV is a loop-free reactive protocol where routes are generated based on demand from the source node. When a source node finds no route to the destination node, it initiates the route discovery process by flooding [
58] the network with route request (RREQ) messages. After discovering the destination node, a unicast message is sent back to the source node in the form of a route reply (RREP) message. A route is established and kept in the routing table of the source node until the link is expired. If any node is unreachable due to broken links, a route error (RERR) message is broadcasted. Like AODV, DYMO is a reactive protocol in which routes are calculated on demand. However, DYMO does not support unnecessary HELLO messages and relies on the sequence numbers assigned to all the messages.
Table 1 shows the characteristic comparison between Ad hoc routing protocols.
3.4. Traffic Characteristics
The dataset used to perform experiments were generated using the SUMO traffic modeling simulator due to the lack of real-world datasets available for Madinah city. The synthetic dataset contained modeling of autonomous vehicles and human-driven vehicles with different traffic densities and distributions to measure the performance difference in each test case.
3.4.1. Distributions
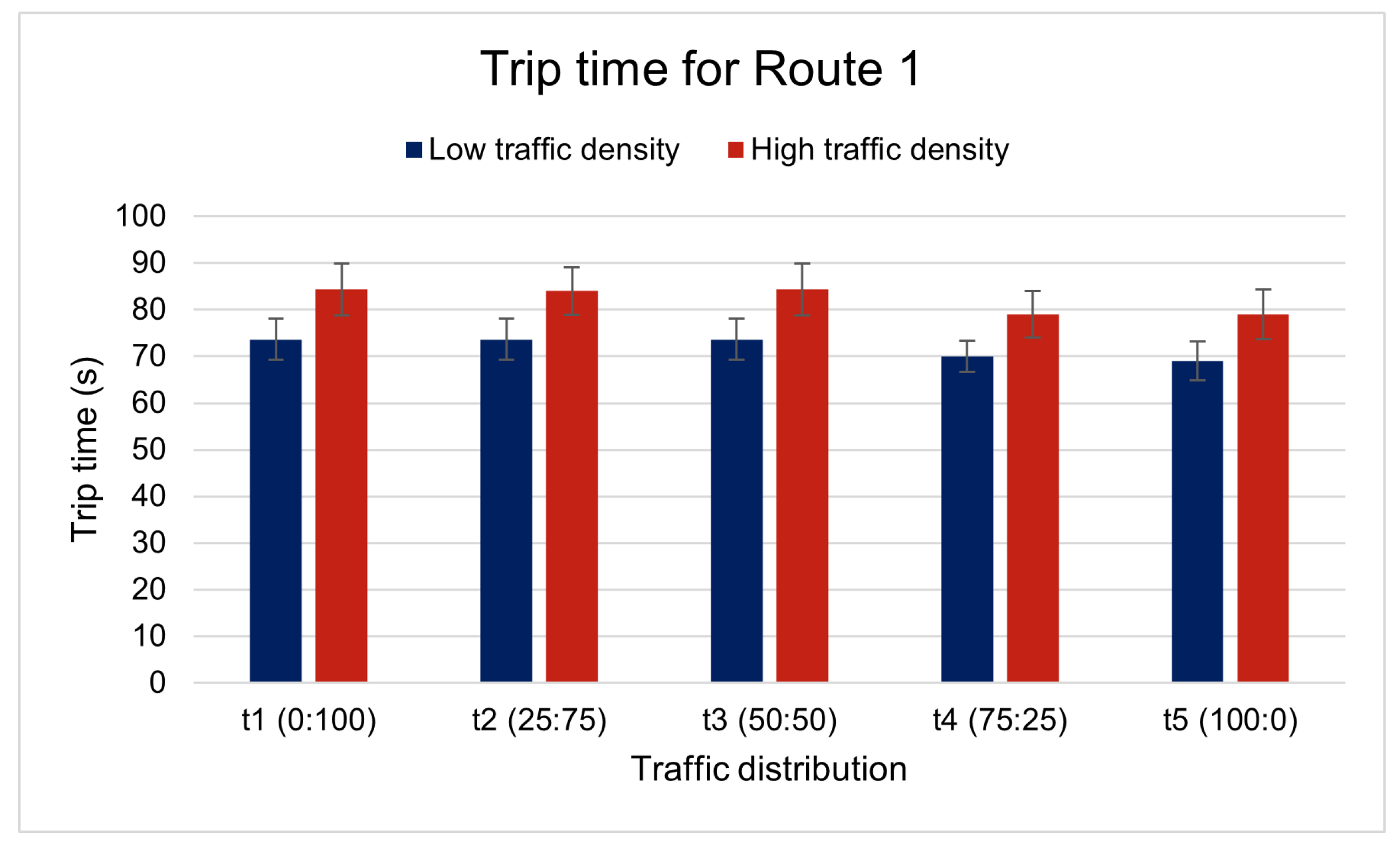
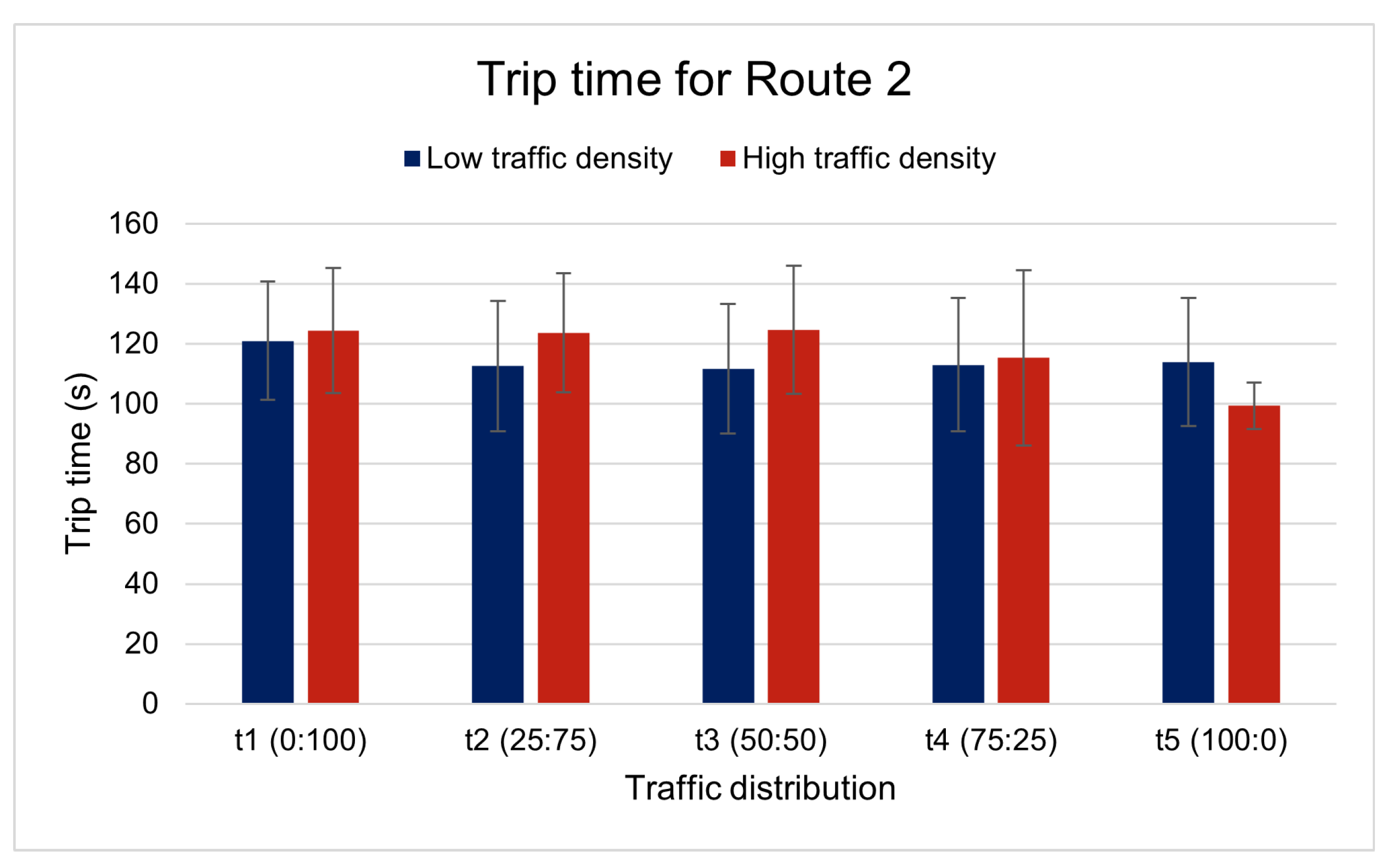
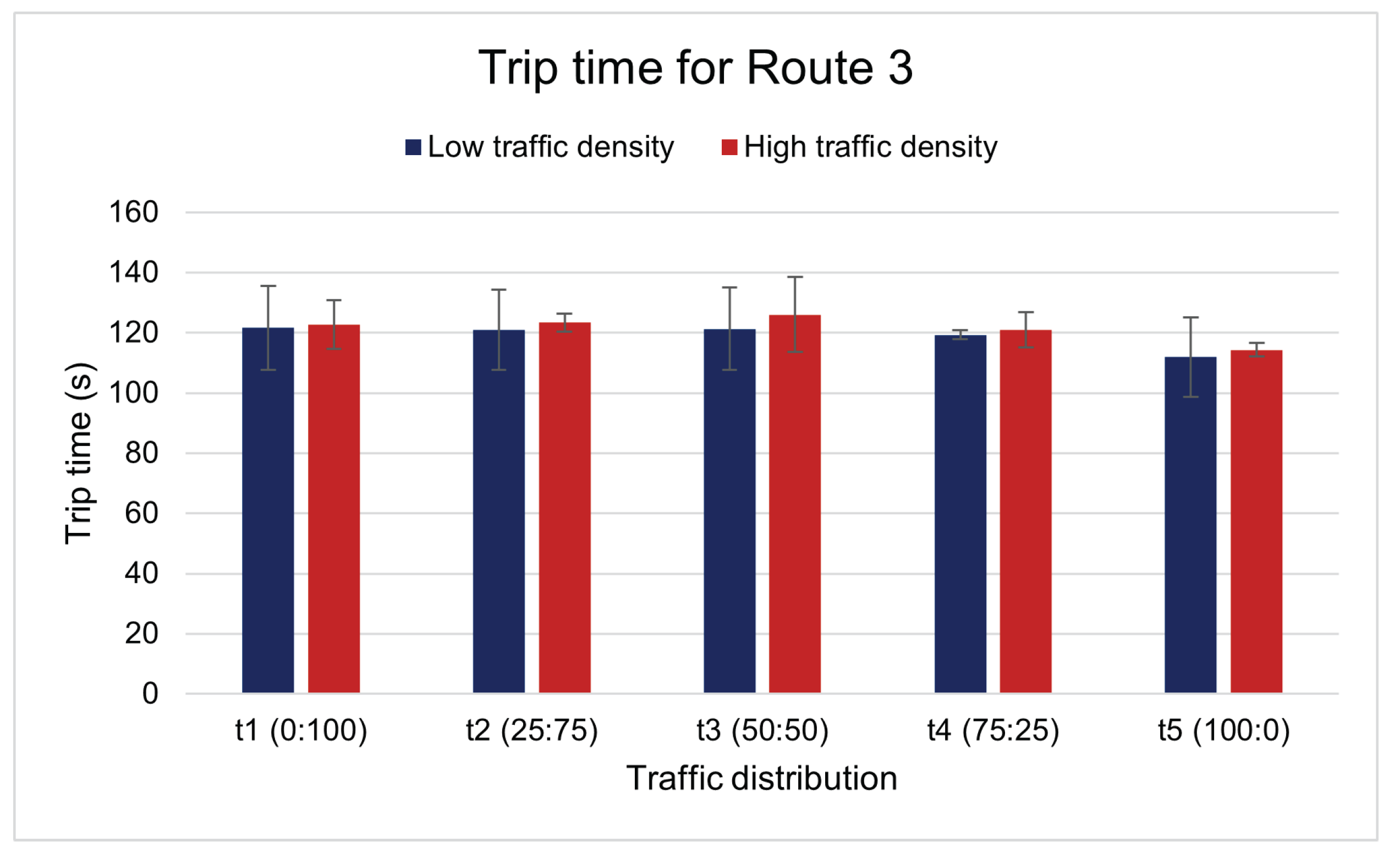
Varying traffic distributions were considered when modeling the traffic to study the effect of a higher volume of autonomous vehicles to human-driven vehicles on the performance metrics captured. Five distribution types were modeled:
t1—Autonomous 0: 100 Human-Driven;
t2—Autonomous 25: 75 Human-Driven;
t3—Autonomous 50: 50 Human-Driven;
t4—Autonomous 75: 25 Human-Driven;
t5—Autonomous 100: 0 Human-Driven.
3.4.2. Densities
Varying traffic densities were considered when modeling the traffic to study the effect of a higher volume of vehicles on the performance metrics captured from the two test case scenarios detailed later. Four densities of traffic were modeled:
500 vehicles (low);
1000; vehicles;
2500 vehicles;
5000 vehicles (high).
Both low- and high-density numbers of vehicles are labeled to differentiate between the performance metrics captured and discussed in the results and analysis section of this paper.
3.5. Performance Metrics
The performance metrics measured in the experiments reflected the objective of the two application scenarios:
The average trip time is measured through the SUMO simulator that tracks the vehicle trajectory over the road network and measures the departure time and arrival time, even the waiting time for each vehicle that completed its route. In the case of latency, the trace file of the experiment provides time stamps of the packet transmission time and packet receiving time for specified nodes within the communication range. We compute the latency from the time the first ’accident’ packet is sent until the last node in the communication range receives the packet and acknowledges it.
6. Conclusions
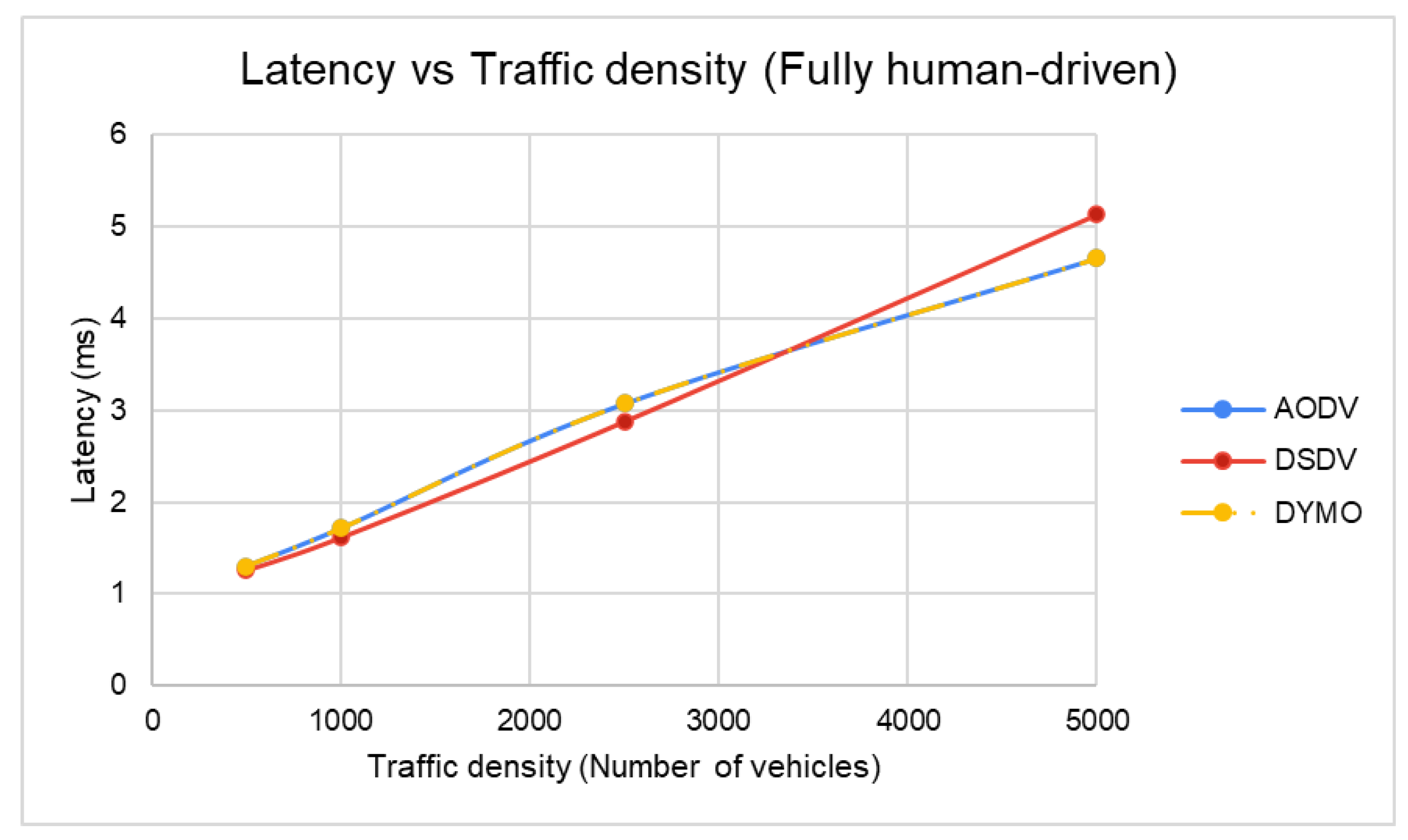
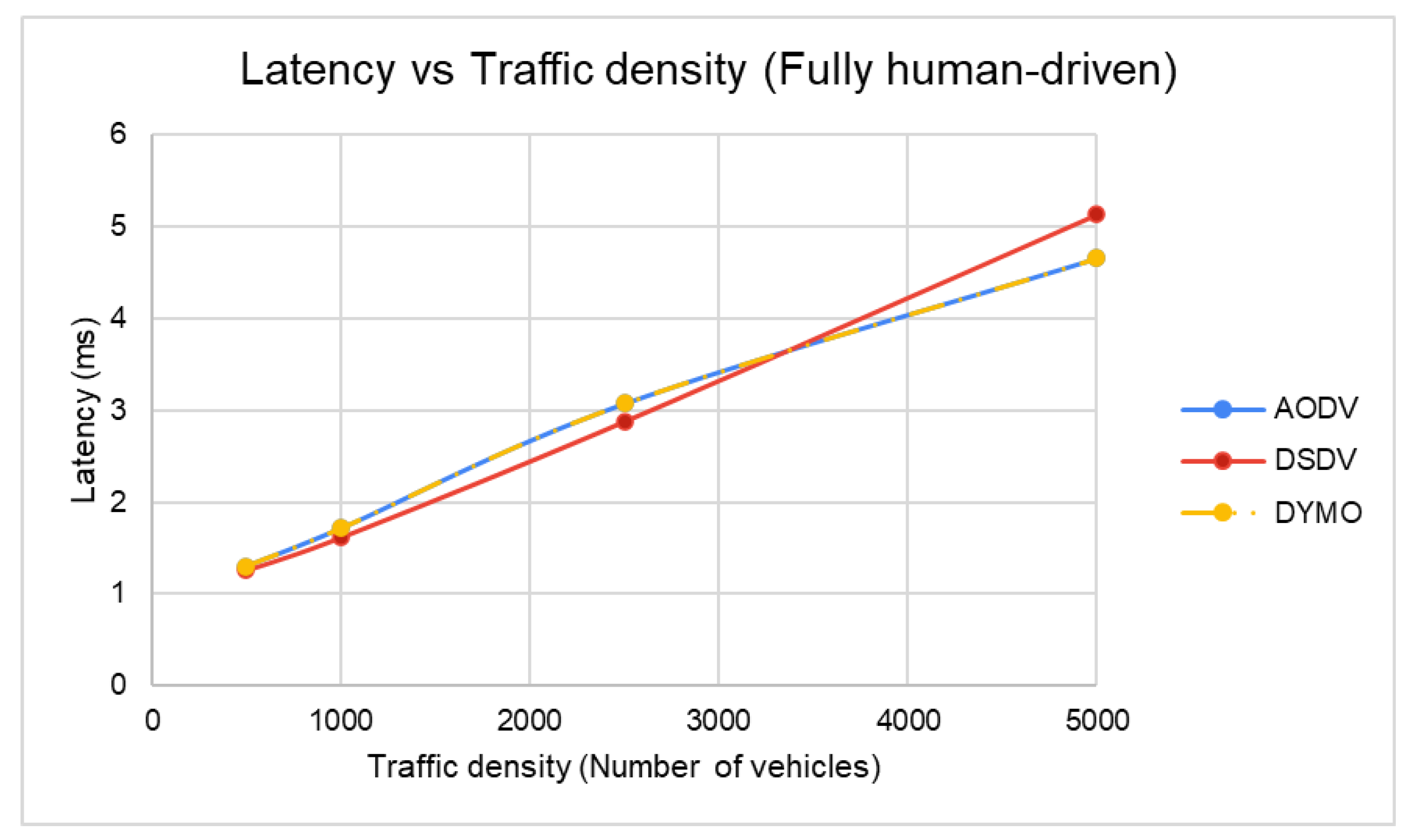
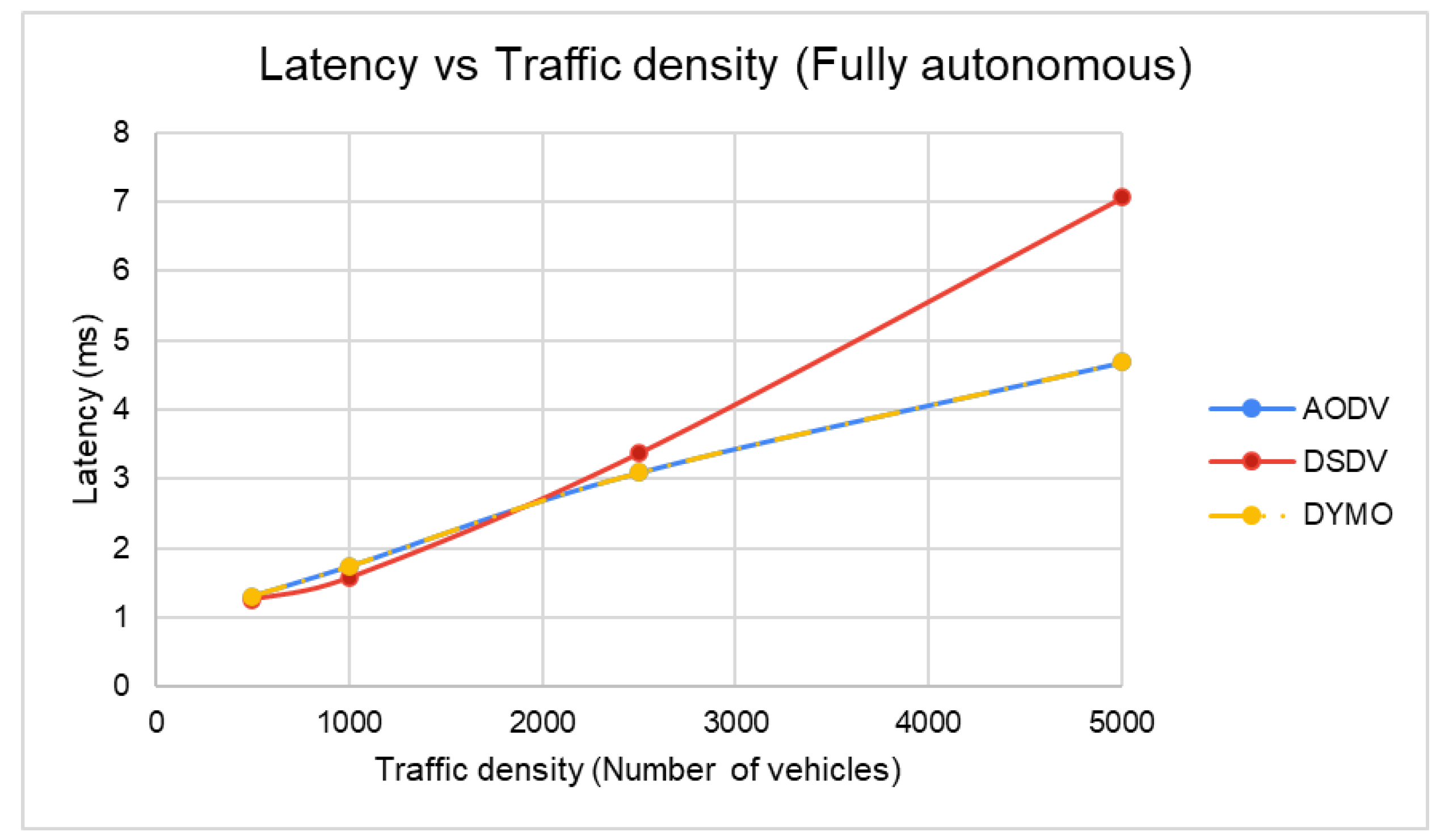
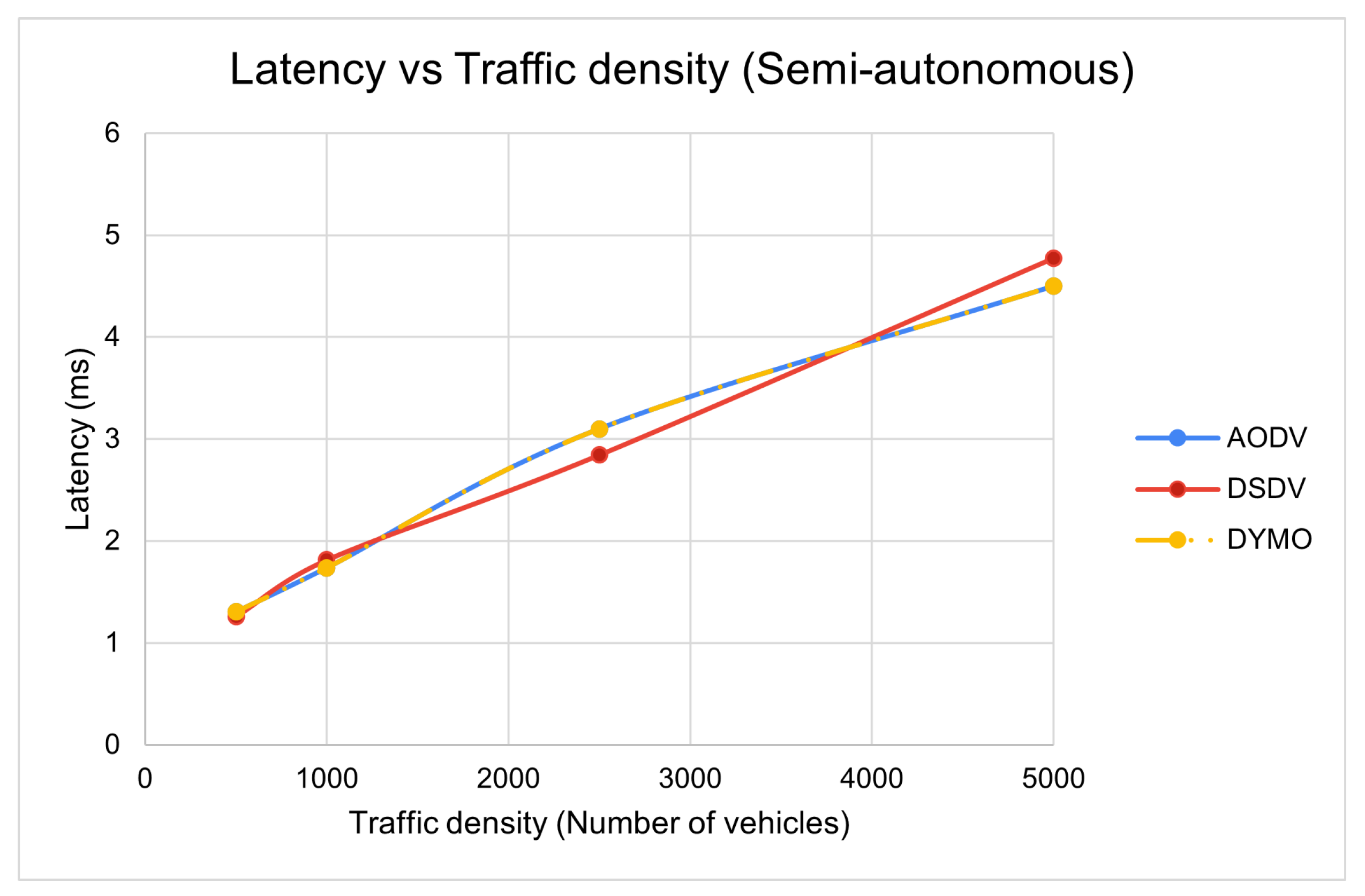
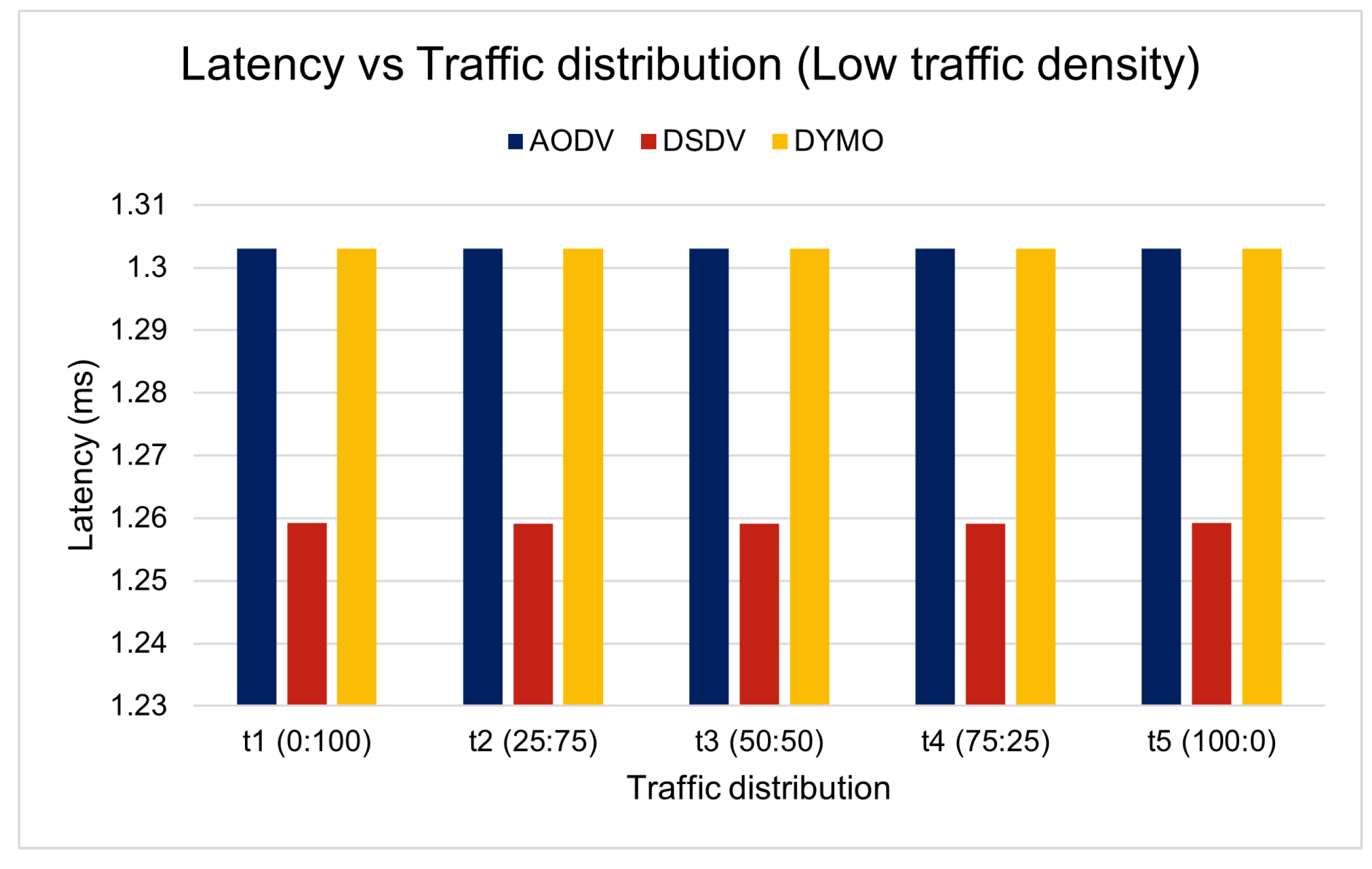
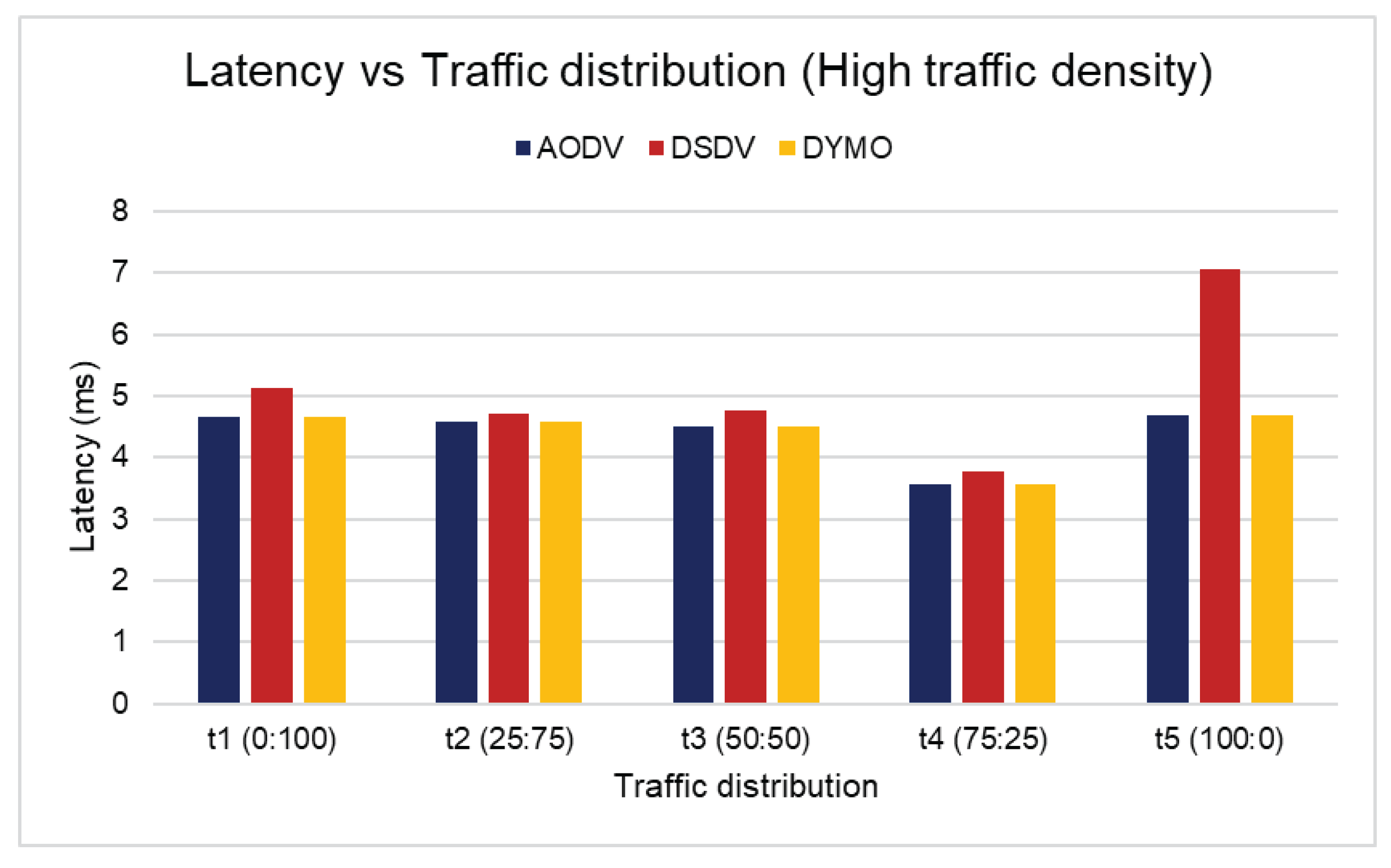
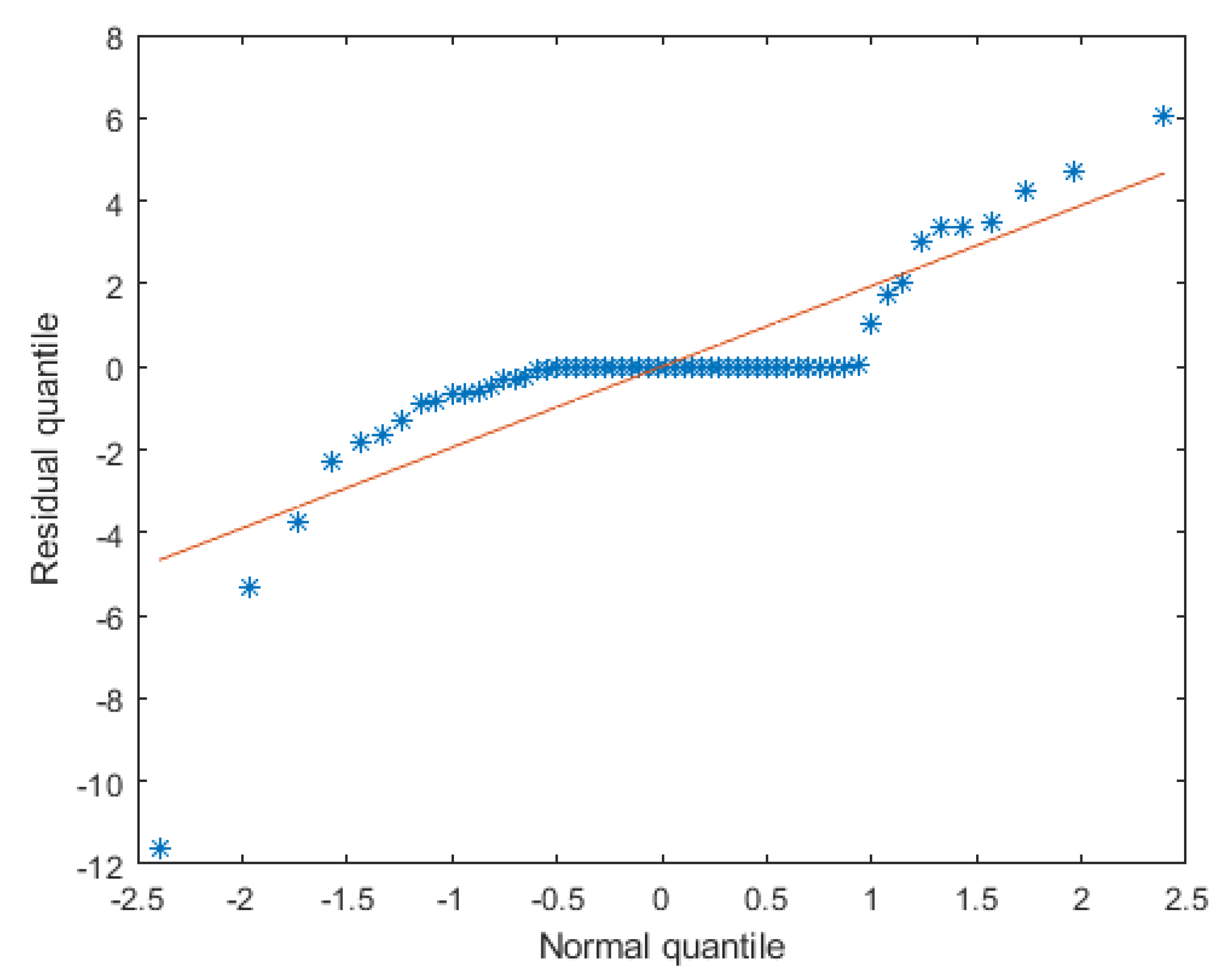
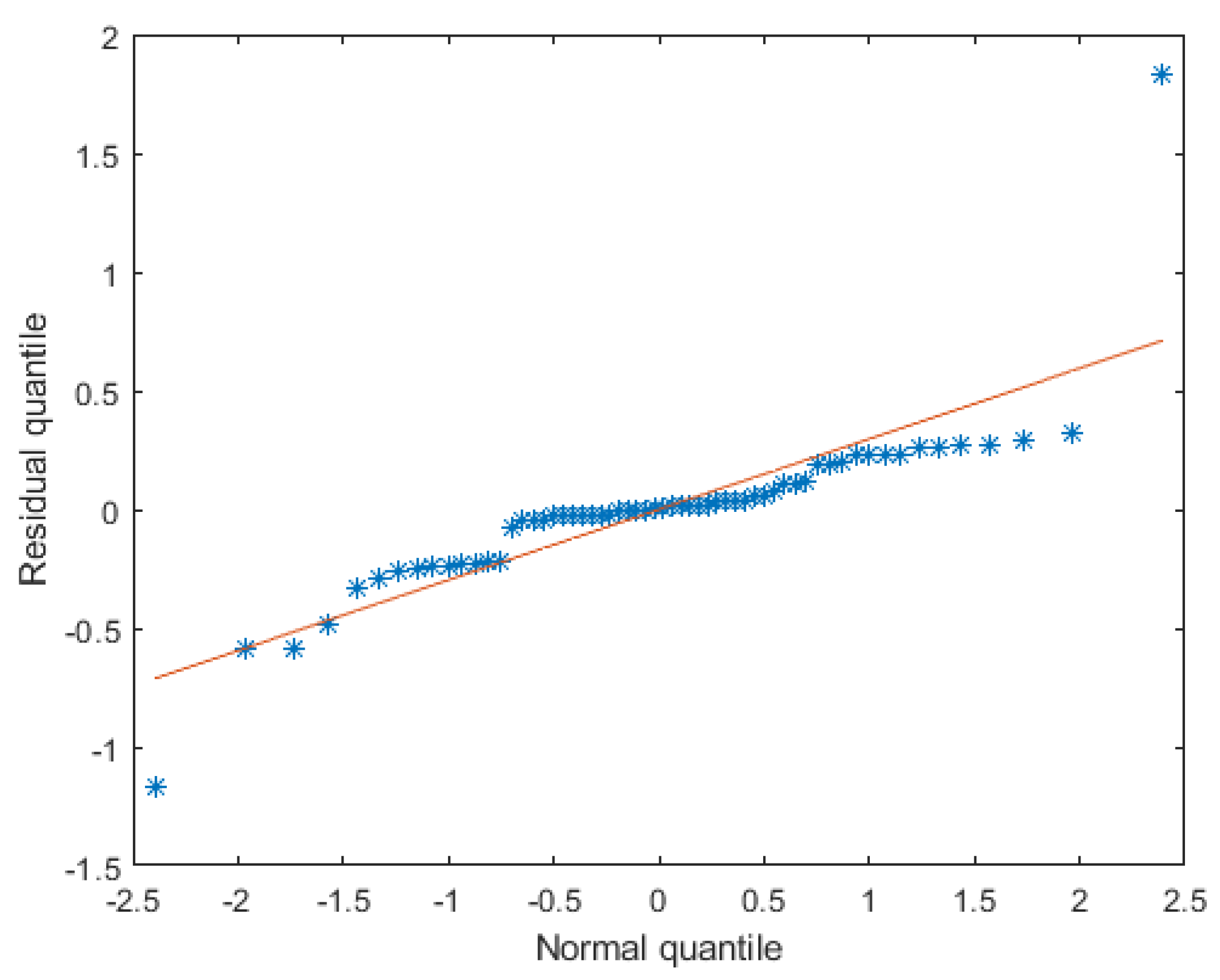
In this work, we evaluated the performance of various VANET routing protocols in Madinah city under different traffic scenarios. Two reactive routing protocols, AODV and DYMO, are selected, while one proactive protocol, DSDV, is considered. We considered both fully autonomous and human-driven vehicles in our study to replicate the state of future traffic. We further model multiple traffic distributions with the varying volume of autonomous and human-driven vehicles, along with several traffic densities to represent different traffic conditions. We performed simulations to analyze the average trip time and average communication latency between vehicles. For an average trip time, we found that fully autonomous traffic distribution achieved the shortest trip time, with a reduction of around 7.1% compared to other distributions with human-driven vehicles. For average latency, we observed that the DSDV protocol performs better in fully human-driven scenarios. However, in the case of fully autonomous traffic, both reactive protocols outperform the DSDV protocol, reducing the latency by 2.38 milliseconds (33.7% improvement). From our experiments, we recommend the use of reactive routing protocols compared to the proactive DSDV protocol, as the control message overhead of DSDV is much higher. Furthermore, we performed an ANOVA test to examine the effect of factors on the trip time and latency results. For the average trip time, we observed that the routes compared to traffic density and distribution had the most significant effect (91.8%) on the variation of the results. On the other hand, traffic density had the highest impact on the latency result (91.1%) compared to other factors. The ANOVA table also highlighted the effects of the interactions between the factors on the results. The visual tests observed from the Q-Q plots exhibit that the residuals fall evenly around the least-squares line, forming a heavy-tailed linear line. This confirms our assumption that the residuals are normally distributed. Hence, the variation in the results is not random but due to factors considered in our study.
6.1. Limitations
Our focus was studying and evaluating the routing protocols under different traffic scenarios. We considered 500 vehicles as a low traffic density and 5000 vehicles as a high traffic density for our study. It might not be the case in a real-world scenario for a highly congested area. Furthermore, we did not assess dynamic vehicle velocity changes based on conditions in our simulation. Although we considered a reasonable size of map area for the city of Madinah, we might need to take into account a larger area to study the overall performance. Other environmental factors that might affect the performance are out of scope for this particular study.
6.2. Future Works
This research can be extended by conducting further studies on the various issues considered in this article in the future. For the traffic model designed and adopted in this work, multiple factors can be expanded to outline the effect of those factors. For example, the car-following model for the human-driven vehicle can be another factor to consider by comparing against models, such as Krauss, EIDM, Wiedemann, and so on. Further, the parameters for each respective car-following model can be studied, such as minimum gaps kept from the vehicle in front, acceleration, and deceleration rates and other parameters. Another future study could outline the effect of even higher traffic densities in Madinah city with further distributions of not just passenger vehicles but also buses, motorcycles, etc. Routing protocols in this study could be expanded to include other ad hoc protocols, such as OLSR and DSR. Performance metrics can be furthered by considering the impact of the packet delivery ratio and the network throughput of the accident notification and relaying packets on traffic congestion. Other metrics could also be studied such as the effect of the network behavior on the carbon dioxide emissions and waiting time of passenger vehicles in the traffic model.


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}