
Resilient Networked Control of Inverter-Based Microgrids against False Data Injections


Abstract
:1. Introduction
2. Model of Inverter-Based Microgrids
2.1. The Microgrid State-Space Representation
2.1.1. VSI State-Space Model
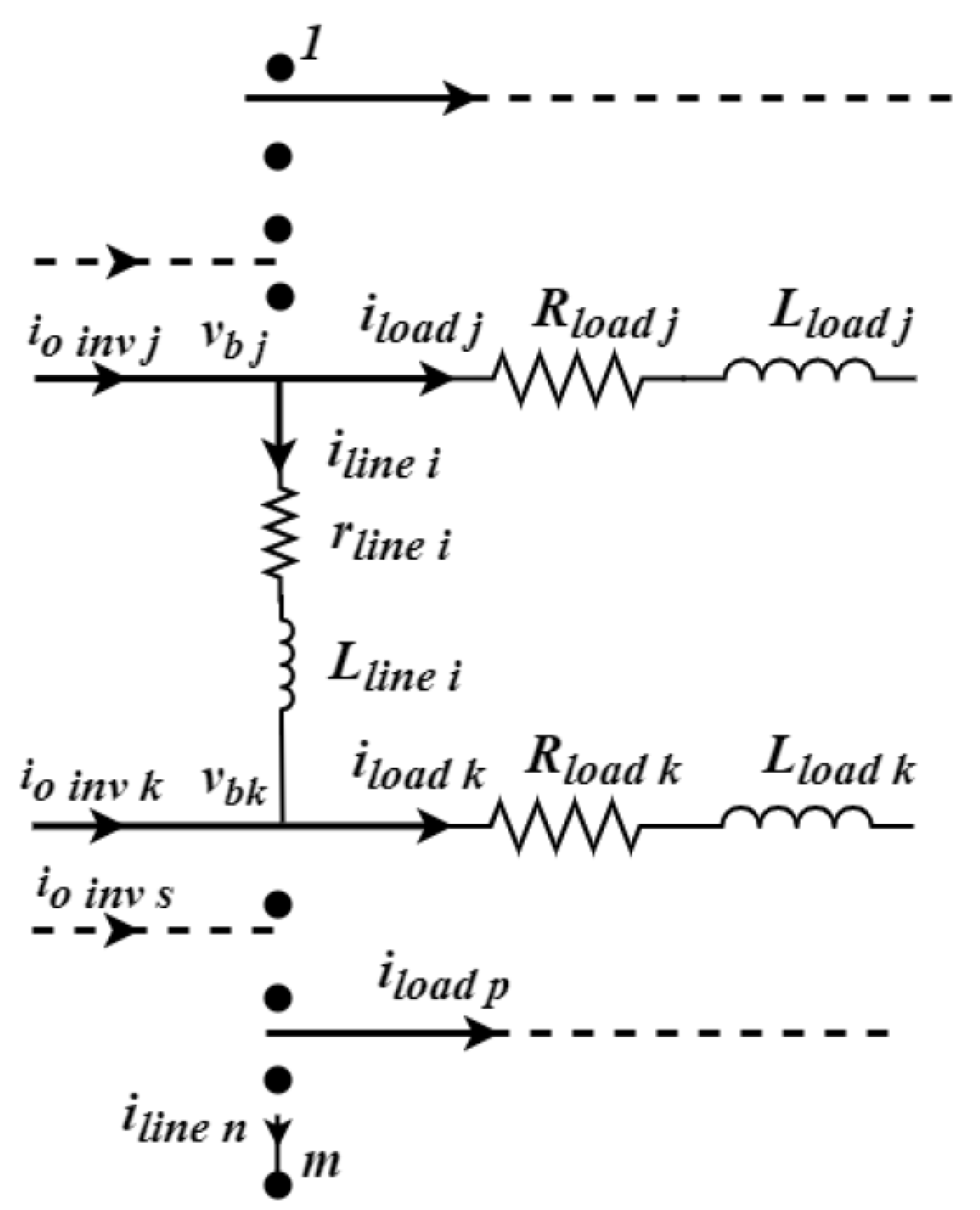
2.1.2. Network Model
2.1.3. Load Model
2.1.4. Complete Microgrid Model
2.2. Secondary Control of the Inverter-Based Microgrid
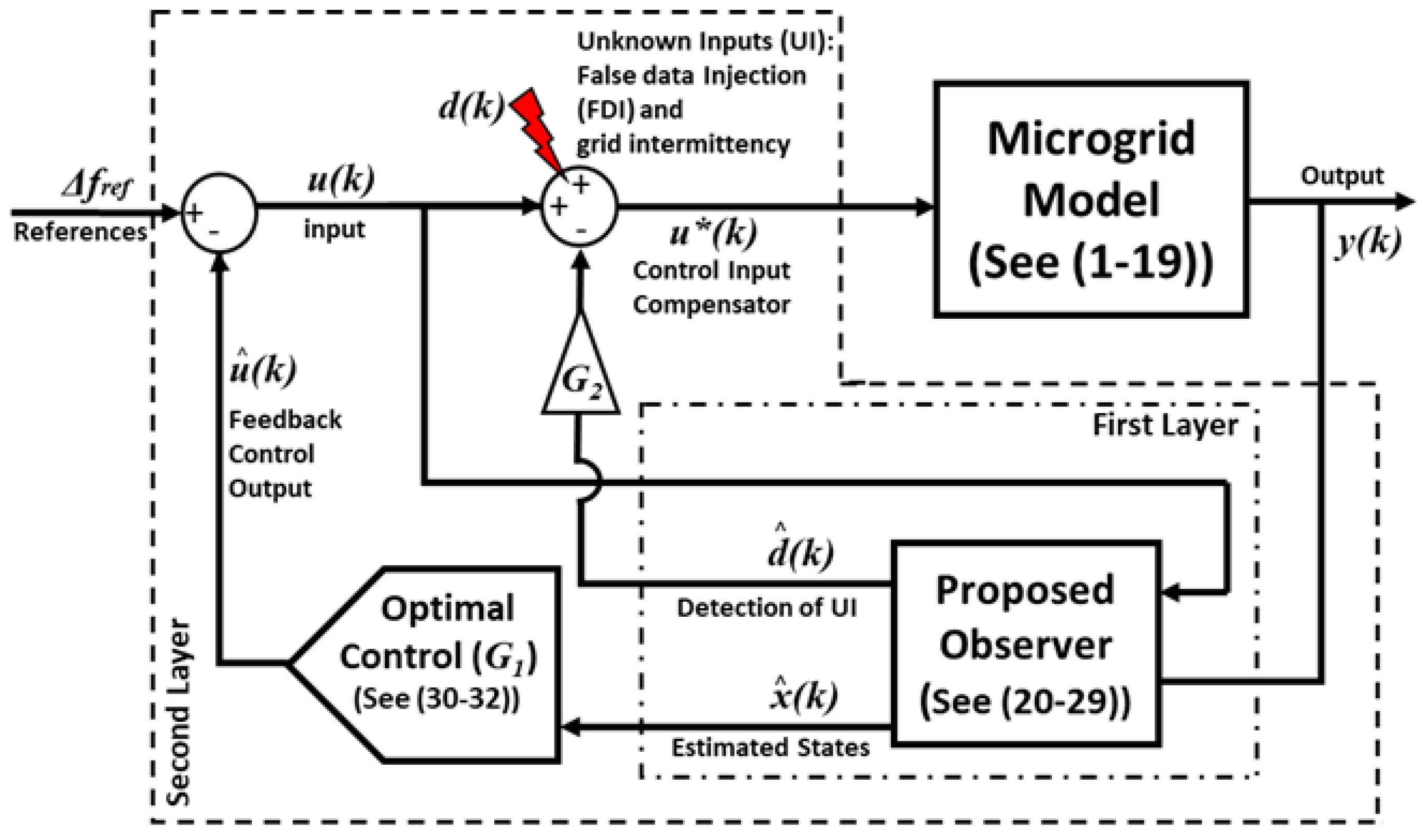
3. The Proposed Control Method
3.1. Design of Unknown Input Observer
3.2. Unknown Input Compensator Design
4. Vulnerability Analysis of Microgrids with Inverter-Based Resources
- Stealthy FDIs always severely impact systems since this class of cyber attacks cannot be easily identified [22]. Most detecting methods fail correctly to discover the stealthy FDIs since they mainly rely on residual-based detection that may not trigger the alarm in the presence of this cyber attack type;
- Islanded microgrids have limited access to energy resources, and the poor performance of these inverter-based resources can draw the grid to an unstable control region;
- To control this microgrid model and regulate the frequency, all inverters’ angles are highly dependent on the first inverter (reference) active power. In other words, any inaccuracy in the first inverter active power can degrade or destabilize the energy resources in a microgrid, as shown further.
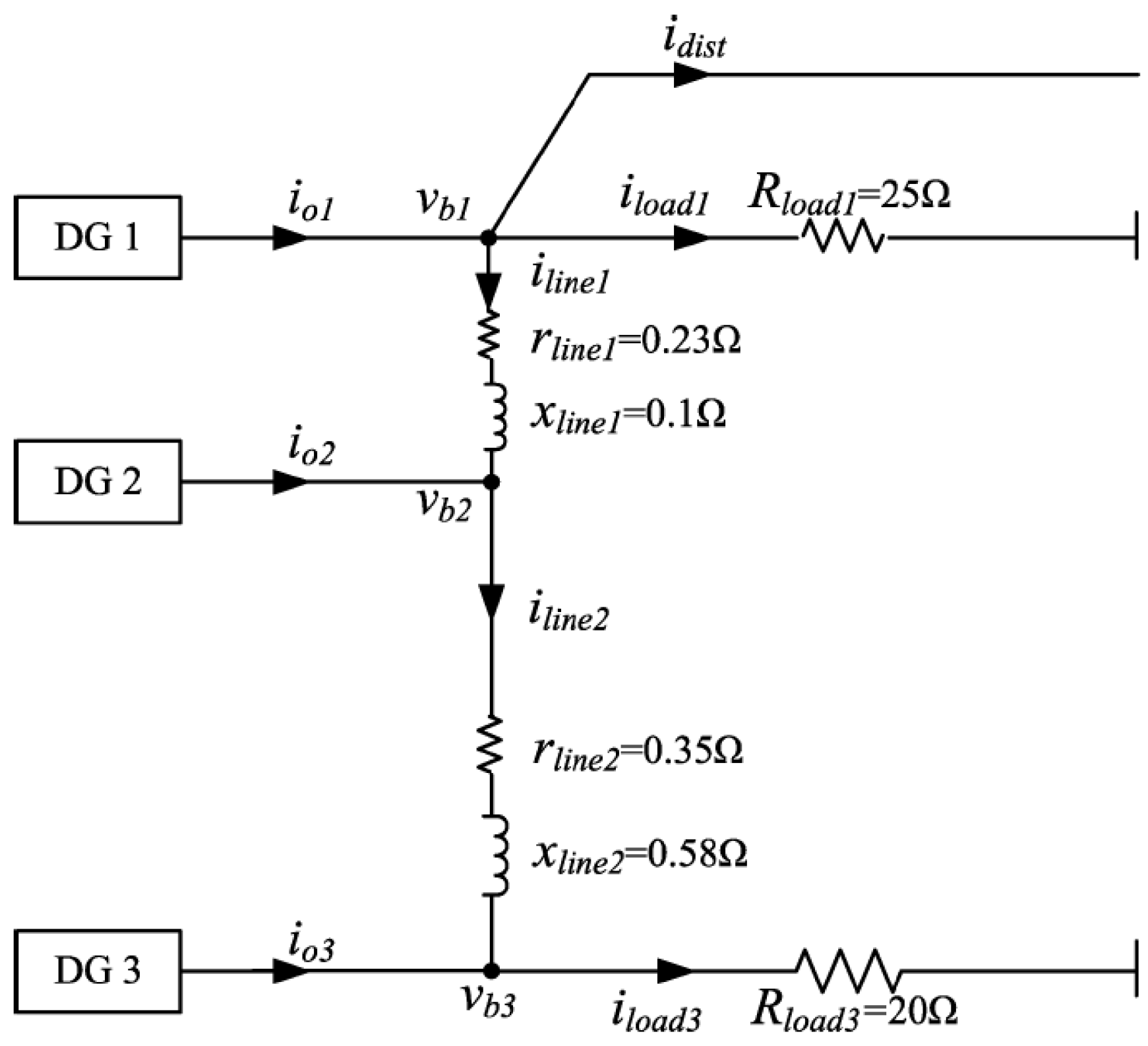
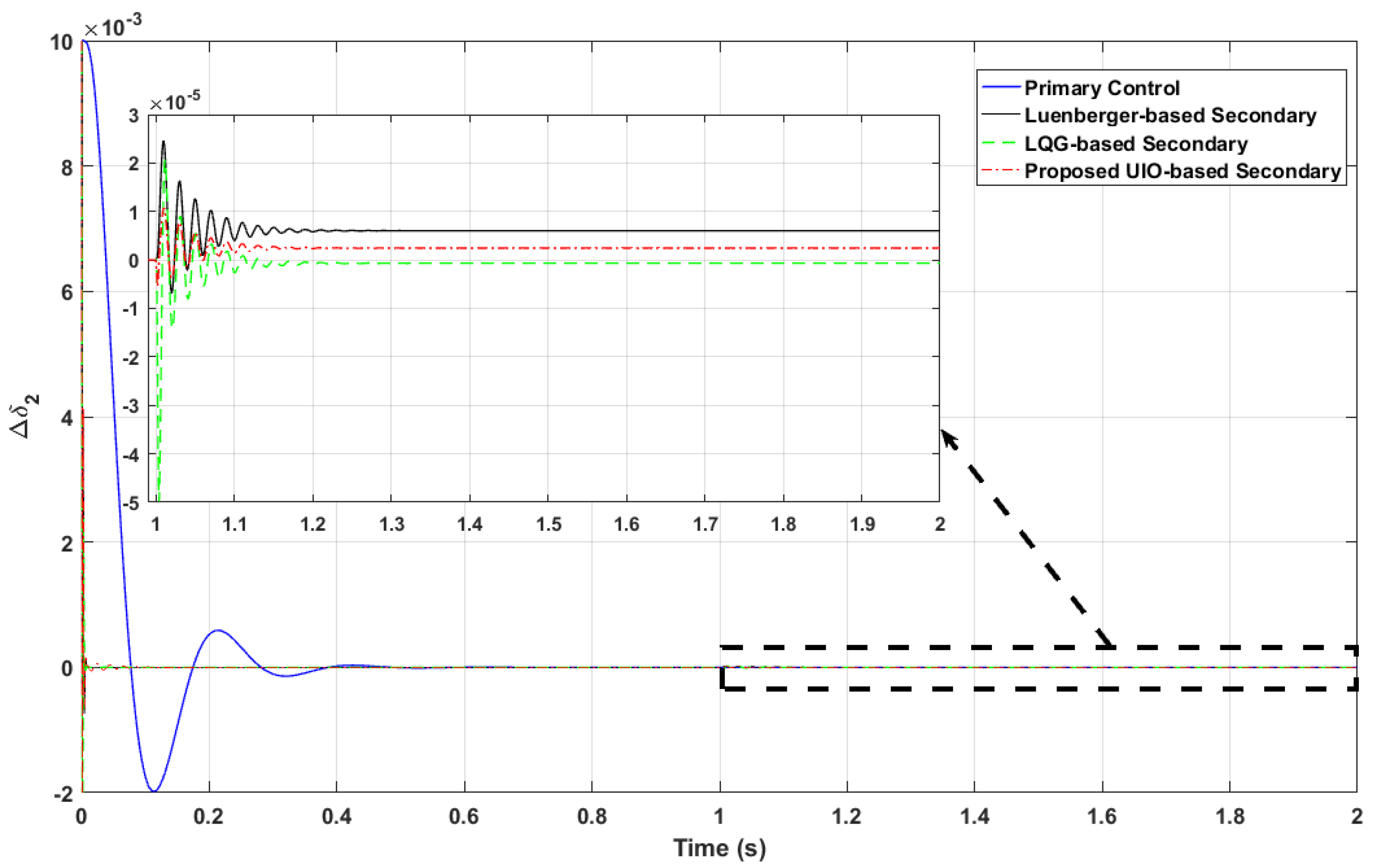
5. Simulation and Results
5.1. Case 1
5.2. Case 2
5.3. Case 3
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Khalghani, M.R.; Solanki, J.; Solanki, S.K.; Khooban, M.H.; Sargolzaei, A. Resilient Frequency Control Design for Microgrids Under False Data Injection. IEEE Trans. Ind. Electron. 2021, 68, 2151–2162. [Google Scholar] [CrossRef]
- Khalghani, M.R.; Solanki, J.; Khushalani-Solanki, S.; Sargolzaei, A. Stochastic Load Frequency Control of Microgrids Including Wind Source Based on Identification Method. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Victorio, M.; Sargolzaei, A.; Khalghani, M.R. A Secure Control Design for Networked Control Systems with Linear Dynamics under a Time-Delay Switch Attack. Electronics 2021, 10, 322. [Google Scholar] [CrossRef]
- Khalghani, M.R.; Solanki, J.; Solanki, S.K.; Sargolzaei, A. Resilient and Stochastic Load Frequency Control of Microgrids. In Proceedings of the 2019 IEEE Power Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Qi, J.; Hahn, A.; Lu, X.; Wang, J.; Liu, C.C. Cybersecurity For Distributed Energy Resources And Smart Inverters. IET Cyber-Phys. Syst. Theory Appl. 2016, 1, 28–39. [Google Scholar] [CrossRef] [Green Version]
- Bidram, A.; Poudel, B.; Damodaran, L.; Fierro, R.; Guerrero, J.M. Resilient and Cybersecure Distributed Control of Inverter-Based Islanded Microgrids. IEEE Trans. Ind. Inform. 2020, 16, 3881–3894. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Tran, Q.T.; Caire, R.; Gavriluta, C.; Nguyen, V.H. Agent Based Distributed Control Of Islanded Microgrid—Real-Time Cyber-Physical Implementation. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Turin, Italy, 26–29 September 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Q.; Shahidehpour, M.; Alabdulwahab, A.; Abusorrah, A. A Cyber-Attack Resilient Distributed Control Strategy In Islanded Microgrids. IEEE Trans. Smart Grid 2020, 11, 3690–3701. [Google Scholar] [CrossRef]
- Mahmud, R.; Seo, G.S. Blockchain-Enabled Cyber-Secure Microgrid Control Using Consensus Algorithm. In Proceedings of the 2021 IEEE 22nd Workshop on Control and Modelling of Power Electronics (COMPEL), Cartagena, Colombia, 2–5 November 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Zografopoulos, I.; Konstantinou, C. Detection of Malicious Attacks In Autonomous Cyber-Physical Inverter-Based Microgrids. IEEE Trans. Ind. Inform. 2021, 1. [Google Scholar] [CrossRef]
- Liu, S.; Hu, Z.; Wang, X.; Wu, L. Stochastic Stability Analysis and Control of Secondary Frequency Regulation for Islanded Microgrids Under Random Denial of Service Attacks. IEEE Trans. Ind. Inform. 2019, 15, 4066–4075. [Google Scholar] [CrossRef]
- Lu, L.Y.; Liu, H.J.; Zhu, H.; Chu, C.C. Intrusion Detection in Distributed Frequency Control of Isolated Microgrids. IEEE Trans. Smart Grid 2019, 10, 6502–6515. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Wang, Y.; Tran, Q.T.; Caire, R.; Xu, Y.; Besanger, Y. Agent-based Distributed Event-Triggered Secondary Control for Energy Storage System in Islanded Microgrids-Cyber-Physical Validation. In Proceedings of the 2019 IEEE International Conference on Environment and Electrical Engineering and 2019 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I CPS Europe), Genova, Italy, 11–14 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, Analysis and Testing of Autonomous Operation of an Inverter-Based Microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar]
- Banadaki, A.D.; Mohammadi, F.D.; Feliachi, A. State Space Modeling of Inverter Based Microgrids Considering Distributed Secondary Voltage Control. In Proceedings of the 2017 North American Power Symposium (NAPS), Morgantown, WV, USA, 17–19 September 2017; pp. 1–6. [Google Scholar]
- Banadaki, A.D.; Feliachi, A.; Kulathumani, V.K. Fully Distributed Secondary Voltage Control in Inverter-Based Microgrids. In Proceedings of the 2018 IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Denver, CO, USA, 16–19 April 2018; pp. 1–9. [Google Scholar]
- Keshtkar, H.; Mohammadi, F.D.; Solanki, J.; Solanki, S.K. Multi-Agent Based Control of a Microgrid Power System in Case of Cyber Intrusions. In Proceedings of the 2020 IEEE Kansas Power and Energy Conference (KPEC), Manhattan, KS, USA, 13–14 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. Reduced-Order Small-Signal Model of Microgrid Systems. IEEE Trans. Sustain. Energy 2015, 6, 1292–1305. [Google Scholar] [CrossRef]
- Khalghani, M.R.; Khushalani-Solanki, S.; Solanki, J.; Sargolzaei, A. Cyber Disruption Detection In Linear Power Systems. In Proceedings of the 2017 North American Power Symposium (NAPS), Morgantown, WV, USA, 17–19 September 2017; pp. 1–6. [Google Scholar]
- Hou, M.; Muller, P.C. Design of Observers for Linear Systems with Unknown Inputs. IEEE Trans. Autom. Control. 1992, 37, 871–875. [Google Scholar] [CrossRef]
- Guo, F.; Wen, C.; Mao, J.; Song, Y.D. Distributed Secondary Voltage and Frequency Restoration Control of Droop-Controlled Inverter-Based Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4355–4364. [Google Scholar] [CrossRef]
- Liu, C.; Deng, R.; He, W.; Liang, H.; Du, W. Optimal Coding Schemes for Detecting False Data Injection Attacks in Power System State Estimation. IEEE Trans. Smart Grid 2022, 13, 738–749. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standard Inverter-Based Microgrid Model | Reduced-Order Inverter- Based Microgrid Model | |
|---|---|---|
| Eigenvalues | −9.44e6 + j3.14e2 | −9.44e6 + j3.14e2 |
| −9.44e6 − j3.14e2 | −9.44e6 − j3.14e2 | |
| −3.63e6 + j3.14e2 | −3.63e6 + j3.14e2 | |
| −3.63e6 − j3.14e2 | −3.63e6 − j3.14e2 | |
| −2.85e6 + j3.14e2 | −2.85e6 + j3.14e2 | |
| −2.85e6 − j3.14e2 | −2.85e6 − j3.14e2 | |
| −2.94e3 + j7.38e3 | −2.94e3 + j7.38e3 | |
| −2.94e3 − j7.38e3 | −2.94e3 − j7.38e3 | |
| −2.79e3 + j6.84e3 | −2.79e3 + j6.84e3 | |
| −2.79e3 − j6.84e3 | −2.79e3 − j6.84e3 | |
| −2.84e3 + j4.89e3 | −2.84e3 + j4.89e3 | |
| −2.84e3 − j4.89e3 | −2.84e3 − j4.89e3 | |
| −2.53e3 + j4.43e3 | −2.53e3 + j4.43e3 | |
| −2.53e3 − j4.43e3 | −2.53e3 − j4.43e3 | |
| −2.86e3 + j2.92e3 | −2.86e3 + j2.92e3 | |
| −2.86e3 − j2.92e3 | −2.86e3 − j2.92e3 | |
| −2.21e3 + j2.20e3 | −2.21e3 + j2.20e3 | |
| −2.21e3 − j2.20e3 | −2.21e3 − j2.20e3 | |
| −1.49e3 + j2.51e3 | −1.49e3 + j2.51e3 | |
| −1.49e3 − j2.51e3 | −1.49e3 − j2.51e3 | |
| −1.29e3 + j2.10e3 | −1.29e3 + j2.10e3 | |
| −1.29e3 − j2.10e3 | −1.29e3 − j2.10e3 | |
| −1.31e3 + j1.71e3 | −1.31e3 + j1.71e3 | |
| −1.31e3 − j1.71e3 | −1.31e3 − j1.71e3 | |
| −1.22e3 + j1.65e3 | −1.22e3 + j1.65e3 | |
| −1.22e3 − j1.65e3 | −1.22e3 − j1.65e3 | |
| −1.14e3 + j1.54e3 | −1.14e3 + j1.54e3 | |
| −1.14e3 − j1.54e3 | −1.14e3 − j1.54e3 | |
| −1.11e3 + j1.50e3 | −1.11e3 + j1.50e3 | |
| −1.11e3 − j1.50e3 | −1.11e3 − j1.50e3 | |
| −2.00e1 + j3.13e2 | −2.00e1 + j3.13e2 | |
| −2.00e1 − j3.13e2 | −2.00e1 − j3.13e2 | |
| −2.50e1 + j3.13e2 | −2.50e1 + j3.13e2 | |
| −2.50e1 − j3.13e2 | −2.50e1 − j3.13e2 | |
| −1.42e2 + j2.10e2 | −1.42e2 + j2.10e2 | |
| −1.42e2 − j2.10e2 | −1.42e2 − j2.10e2 | |
| −1.23e2 + j1.50e2 | −1.23e2 + j1.50e2 | |
| −1.23e2 − j1.50e2 | −1.23e2 − j1.50e2 | |
| −13.48 + j30.21 | −13.48 + j30.21 | |
| −13.48 − j30.21 | −13.48 − j30.21 | |
| −15.53 + j10.59 | −15.53 + j10.59 | |
| −15.53 − j10.59 | −15.53 − j10.59 | |
| −20.84 | −20.84 | |
| −28.25 | −28.25 | |
| −31.38 | −31.38 | |
| −31.40 | −31.40 | |
| 0 | Removed |
| Inverter Parameters | |||
|---|---|---|---|
| Parameter | Value | Parameter | Value |
| 8 kHz | 9.4 | ||
| 1.35 mH | |||
| 50 F | 0.05 | ||
| 0.1 Ohm | 390 | ||
| 0.35 mH | 10.5 | ||
| 0.03 Ohm | |||
| 31.41 | F | 0.75 | |
| Initial Conditions | |||
|---|---|---|---|
| Parameter | Value | Parameter | Value |
| [380.8 381.8 380.4] | [0 0 0] | ||
| [11.4 11.4 11.4] | [0.4 −1.45 1.25] | ||
| [11.4 11.4 11.4] | [−5.5 −7.3 −4.6] | ||
| [379.5 380.5 379] | [−6 −6 −5] | ||
| [314] | [0 1.9 −3 −0.0113] | ||
| [−3.8] | [0.4] | ||
| [7.6] | [−1.3] | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khalghani, M.R.; Verma, V.; Khushalani Solanki, S.; Solanki, J.M. Resilient Networked Control of Inverter-Based Microgrids against False Data Injections. Electronics 2022, 11, 780. https://doi.org/10.3390/electronics11050780
Khalghani MR, Verma V, Khushalani Solanki S, Solanki JM. Resilient Networked Control of Inverter-Based Microgrids against False Data Injections. Electronics. 2022; 11(5):780. https://doi.org/10.3390/electronics11050780
Chicago/Turabian StyleKhalghani, Mohammad Reza, Vishal Verma, Sarika Khushalani Solanki, and Jignesh M. Solanki. 2022. "Resilient Networked Control of Inverter-Based Microgrids against False Data Injections" Electronics 11, no. 5: 780. https://doi.org/10.3390/electronics11050780
APA StyleKhalghani, M. R., Verma, V., Khushalani Solanki, S., & Solanki, J. M. (2022). Resilient Networked Control of Inverter-Based Microgrids against False Data Injections. Electronics, 11(5), 780. https://doi.org/10.3390/electronics11050780