
The New Method of Active SLAM for Mapping Using LiDAR


Abstract
:1. Introduction
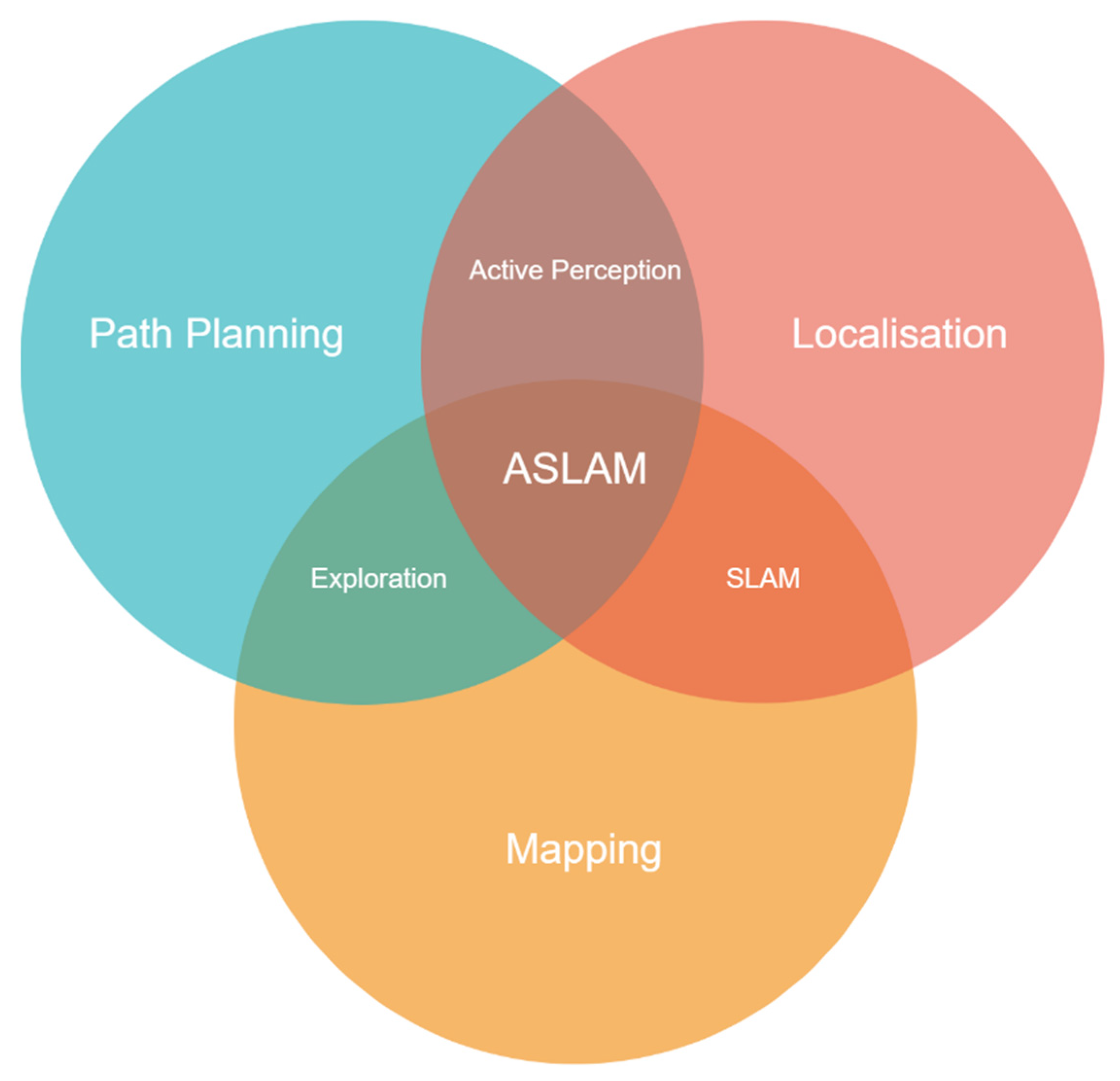
2. Active SLAM
- Position identification.
- Destination selection.
- Navigation and motion control.
3. Hardware and Software Equipment
4. ASLAM Method Design
4.1. Selecting a Potential Destination for Path Planning
| Algorithm 1: | Target position selection |
| Input: | Gridmap, actual position, area of interest |
| Output: | Navigation destination |
| 1. | Generating a matrix of states based on a grid map. |
| 2. | Searching the state matrix and selecting suitable areas based on a predetermined condition. |
| 3. | Clustering of appropriate areas (k-means). |
| 4. | Assigning weight to each area. |
| 5. | Selecting the goal point with the highest weight. |
4.2. K-means and K-means++ Algorithm
4.3. Own Research
4.4. Comparison and Evaluation of Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khairuddin, A.R.; Talib, M.S.; Haron, H. Review on simultaneous localization and mapping (SLAM). In Proceedings of the 2015 IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 27–29 November 2015; pp. 85–90. [Google Scholar] [CrossRef]
- Singandhupe, A.; La, H.M. A Review of SLAM Techniques and Security in Autonomous Driving. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; pp. 602–607. [Google Scholar] [CrossRef]
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Lei, X.; Feng, B.; Wang, G.; Liu, W.; Yang, Y. A Novel FastSLAM Framework Based on 2D Lidar for Autonomous Mobile Robot. Electronics 2020, 9, 695. [Google Scholar] [CrossRef]
- Liu, S.; Li, S.; Pang, L.; Hu, J.; Chen, H.; Zhang, X. Autonomous Exploration and Map Construction of a Mobile Robot Based on the TGHM Algorithm. Sensors 2020, 20, 490. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, Y.; Cai, J.; Chen, M.; Yan, X.; Xie, Y. An autonomous exploration algorithm using environment-robot interacted traversability analysis. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar] [CrossRef]
- Schleicher, D.; Bergasa, L.M.; Ocaña, M.; Barea, R.; López, M.E. Real-time hierarchical outdoor SLAM based on stereovision and GPS fusion. IEEE Trans. Intell. Transp. Syst. 2009, 10, 440–452. [Google Scholar] [CrossRef]
- Cheein, F.A.A.; Toibero, J.M.; di Sciascio, F.; Carelli, R.; Pereira, F.L. MonteCarlo uncertainty maps-based for mobile robotautonomous SLAM navigation. In Proceedings of the IEEE International Conference on Industrial Technology, Viña del Mar, Chile, 14–17 March 2010; pp. 1433–1438. [Google Scholar]
- Stachniss, C. Robotic Mapping and Exploration; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Lluvia, I.; Lazkano, E.; Ansuategi, A. Active Mapping and Robot Exploration: A Survey. Sensors 2021, 21, 2445. [Google Scholar] [CrossRef] [PubMed]
- Bajcsy, R. Active perception. Proc. IEEE 1988, 76, 966–1005. [Google Scholar] [CrossRef]
- Arévalo, M.L.R. On the Uncertainty in Active Slam: Representation, Propagation and Monotonicity. Ph.D. Thesis, Universidadde Zaragoza, Zaragoza, Spain, 2018. [Google Scholar]
- Lee, J.; Lee, K.; Yoo, A.; Moon, C. Design and Implementation of Edge-Fog-Cloud System through HD Map Generation from LiDAR Data of Autonomous Vehicles. Electronics 2020, 9, 2084. [Google Scholar] [CrossRef]
- Qian, J.; Zi, B.; Wang, D.; Ma, Y.; Zhang, D. The Design and Development of an Omni-Directional Mobile Robot Oriented to an Intelligent Manufacturing System. Sensors 2017, 17, 2073. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Biber, P.; Strasser, W. The normal distributions transform: A new approach to laser scan matching. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 27–31 October 2003; pp. 2743–2748. [Google Scholar]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar] [CrossRef]
- Safeea, M.; Neto, P. KUKA Sunrise Toolbox: Interfacing Collaborative Robots With MATLAB. IEEE Robot. Autom. Mag. 2019, 26, 91–96. [Google Scholar] [CrossRef] [Green Version]
- Thrun, S. Wolfram Burgard, and Dieter Fox. In Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Mihálik, M.; Hruboš, M.; Janota, A. Testing of SLAM methods in the Matlab environment. In Proceedings of the 2021 IEEE 19th World Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 21–23 January 2021; pp. 000055–000058. [Google Scholar] [CrossRef]
- Žigo, V. K-means Alogoritmus a Voronoiove Regiony. Bachelor’s Thesis, Fakulta Matematiky, Fyziky a Informatiky, Univerzita Komenského v Bratislave, Bratislava, Slovakia, 2020. [Google Scholar]
- Boyd, S.; Vandenberghe, L. Introduction to Applied Linear Algebra: Vectors, Matrices, and Least Squares; Cambridge University Press: Cambridge, UK, 2018. [Google Scholar]
- Jain, K.A.; Dubes, R.C. Algorithms for Clustering Data; Prentice Hall: Englewood Cliffs, NJ, USA, 1998. [Google Scholar]
- Arthur, D.; Vassilvitskii, S. K-means++: The advantages of careful seeding. In SODA ’07, Proceedings of the Eighteenth Annual ACMSIAM Symposium on Discrete Algorithms, Society for Industrial and Applied Mathematics, Philadelphia, PA, USA, 7–9 January 2007; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2007; pp. 1027–1035. [Google Scholar]
- Andel, J.; Šimák, V.; Skultety, F.; Nemec, D. IoT-based Data Acquisition Unit for aircraft and road vehicle. Transp. Res. Procedia 2021, 55, 969–976. [Google Scholar] [CrossRef]
- Bujňák, M.; Pirník, R.; Rástočný, K.; Janota, A.; Nemec, D.; Kuchár, P.; Tichý, T.; Łukasik, Z. Spherical Robots for Special Purposes: A Review on Current Possibilities. Sensors 2022, 22, 1413. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mihálik, M.; Malobický, B.; Peniak, P.; Vestenický, P. The New Method of Active SLAM for Mapping Using LiDAR. Electronics 2022, 11, 1082. https://doi.org/10.3390/electronics11071082
Mihálik M, Malobický B, Peniak P, Vestenický P. The New Method of Active SLAM for Mapping Using LiDAR. Electronics. 2022; 11(7):1082. https://doi.org/10.3390/electronics11071082
Chicago/Turabian StyleMihálik, Michal, Branislav Malobický, Peter Peniak, and Peter Vestenický. 2022. "The New Method of Active SLAM for Mapping Using LiDAR" Electronics 11, no. 7: 1082. https://doi.org/10.3390/electronics11071082
APA StyleMihálik, M., Malobický, B., Peniak, P., & Vestenický, P. (2022). The New Method of Active SLAM for Mapping Using LiDAR. Electronics, 11(7), 1082. https://doi.org/10.3390/electronics11071082