
Investigations on Field Distribution along the Earth’s Surface of a Submerged Line Current Source Working at Extremely Low Frequency Band



Abstract
:1. Introduction
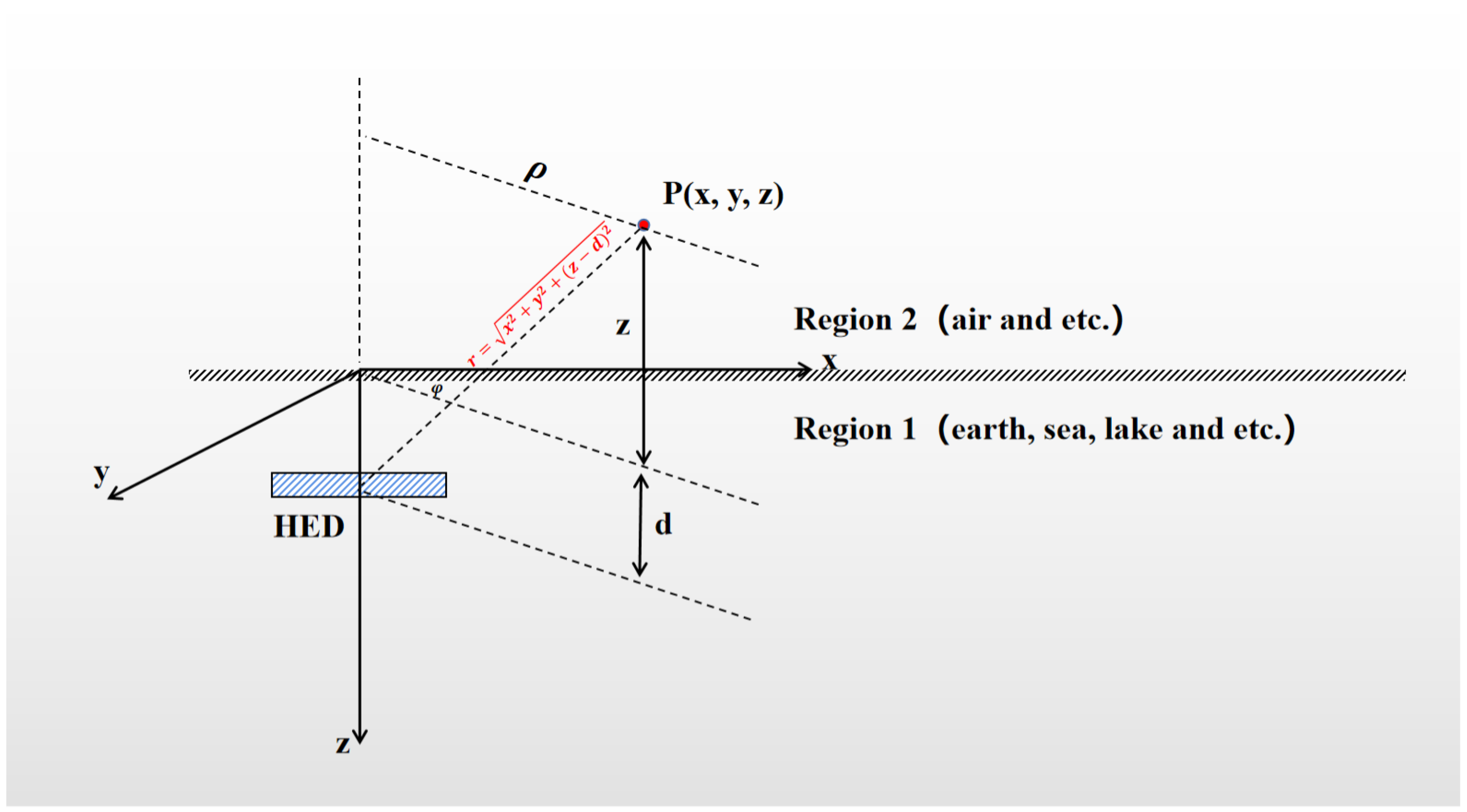
2. Theoretical Model
2.1. Gauss-Laguerre Method
2.2. Romberg-Euler Method
3. Experiments and Results Discussions
3.1. Experiments Description
3.2. Results Discussion
3.2.1. Validation of the Numerical Model
3.2.2. Investigations on the Field Distribution
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zenneck, J. Propagation of plane electromagnetic waves along a plane conducting surface and its bearing on the theory of transmission in wireless telegraphy. Ann. Phys. 1907, 23, 846–866. [Google Scholar] [CrossRef] [Green Version]
- Sommerfeld, A. Propagation of waves in wireless telegraphy. Ann. Phys. 1909, 333, 665–736. [Google Scholar] [CrossRef] [Green Version]
- Baños, A.J. Dipole Radiation in the Presence of a Conducting Half-Space; Pergamon Press: Oxford, UK, 1966. [Google Scholar]
- Pappert, R.A.; Moler, W.F. Propagation theory and Calculations at Lower Extremely Low Frequencis (ELF). Commun. IEEE Trans. 1974, 22, 438–451. [Google Scholar] [CrossRef]
- Chew, W.C. Waves and Fields in Inhomogeneous Media; IEEE Press: Piscataway, NJ, USA, 1995. [Google Scholar]
- Al-Shamma, A.I.; Shaw, A.; Saman, S. Propagation of electromagnetic waves at MHz frequencies through seawater. IEEE Trans. Ant. Prop. 2004, 52, 2843–2849. [Google Scholar] [CrossRef]
- Wang, H.; Zheng, K.; Yang, K.; Ma, Y. Electromagnetic field in air produced by a horizontal magnetic dipole immersed in sea: Theoretical analysis and experimental results. IEEE Trans. Ant. Prop. 2014, 62, 4647–4655. [Google Scholar] [CrossRef]
- Pan, W.Y.; Li, K. Propagation of SLF/ELF Electromagnetic Waves; Springer: Berlin, Germany, 2014. [Google Scholar]
- Zhima, Z.; Hu, Y.; Shen, X.; Chu, W.; Piersanti, M.; Parmentier, A.; Zhang, Z.; Wang, Q.; Huang, J.; Zhao, S.; et al. Storm-Time Features of the Ionospheric ELF/VLF Waves and Energetic Electron Fluxes Revealed by the China Seismo-Electromagnetic Satellite. Appl. Sci. 2021, 11, 2617. [Google Scholar] [CrossRef]
- Chave, A.D.; Flosadottir, A.; Cox, C.S. Some Comments on Seabed Propagation of ULF/ELF Electromagnetic fields. Radio Sci. 2016, 25, 825–836. [Google Scholar] [CrossRef]
- Wang, J.; Li, B. Electromagnetic Fields Generated above a Shallow Sea by a Submerged Horizontal Electric Dipole. IEEE Trans. Antenna Propag. 2017, 65, 2707–2712. [Google Scholar] [CrossRef]
- Xiang, G.; Yan, S.; Li, B. Localisation of Ferromagnetic Target with Three Magnetic Sensors in the Movement Considering Angular Rotation. Sensors 2017, 17, 2079. [Google Scholar]
- Wang, J.; Li, B.; Chen, L.; Li, L. A Novel Detection Method for Underwater Moving Targets by Measuring Their ELF Emissions with Inductive Sensors. Sensors 2017, 17, 1734. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, T.; He, L.N.; Li, K. Poynting vector of an ELF electromagnetic wave in three-layered ocean floor. J. Electromagn. Waves Appl. 2018, 32, 2339–2349. [Google Scholar] [CrossRef]
- Li, F.; Yang, Z.; Fan, Y.; Li, Y.; Li, G. Application of a New Combination Algorithm in ELF-EM Processing. Symmetry 2020, 12, 337. [Google Scholar] [CrossRef] [Green Version]
- King, R.W.P.; Wu, T.T. Lateral wave: Formulas for the magnetic field. J. Appl. Phys. 1983, 54, 507–514. [Google Scholar] [CrossRef]
- King, R.W.P. Electromagnetic surface waves: New formulas and their application to determine the electrical properties of the sea bottom. J. Appl. Phys. 1985, 58, 3612–3624. [Google Scholar] [CrossRef]
- King, R.W.P.; Wu, T.T. Properties of lateral electromagnetic fields and their application. Radio Sci. 1986, 21, 13–23. [Google Scholar] [CrossRef]
- Dunn, J.M. Lateral wave propagation in a three-layered medium. Radio Sci. 1986, 21, 787–796. [Google Scholar] [CrossRef]
- Bogie, S. Conduction and Magnetic Signaling in the Sea. Radio Electron. Eng. 1972, 42, 447–452. [Google Scholar] [CrossRef]
- Diegel, M.; King, R.W.P. 1973: Electromagnetic propagation between antennas submerged in the ocean. IEEE Trans. Ant. Prop. 1973, 4, 507–513. [Google Scholar]
- Hoh, Y.S. Propagation Prediction for the Navy Extremely Low Frequency Program. IEEE J. Ocean. Eng. 1984, 9, 164–178. [Google Scholar]
- King, R.W.P.; Owen, M.; Wu, T.T. Lateral Electromagnteic Waves: Theory and Applications to Communications, Geophysical Exporation, and Remote Sensing; Springer: New York, NY, USA, 1992. [Google Scholar]
- Li, K. Electromagnetic Fields in Stratified Media; Springer: Berlin, Germany, 2009. [Google Scholar]
- Yang, K.; Pellegrini, A.; Munoz, M.; Brizzi, A.; Alomainy, A.; Hao, Y. Numerical Analysis and Characterisation of THz Propagation Channel for Body-Centric Nano-Communications. IEEE Trans. Thz Sci. Technol. 2015, 5, 419–426. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paramters | Values |
|---|---|
| Bandwith | 0.1 Hz–200 Hz |
| Noise Level | 0.057 pT/@1 Hz |
| Measurement Range | ±10 nT |
| Output Voltage | ±10 V |
| NRP | ≤0.35 W |
| Freq. | a | b | c | SSE | RMSE |
|---|---|---|---|---|---|
| 3 Hz | 30.86 | −0.87 | 0.46 | 4.43 | 0.22 |
| 5 Hz | 39.56 | −0.85 | 2.11 | 25.99 | 0.53 |
| 9 Hz | 46.17 | −0.63 | 3.43 | 4.83 | 0.23 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, K.; Wang, J.; Liu, S.; Ding, K.; Li, H.; Li, B. Investigations on Field Distribution along the Earth’s Surface of a Submerged Line Current Source Working at Extremely Low Frequency Band. Electronics 2022, 11, 1116. https://doi.org/10.3390/electronics11071116
Yang K, Wang J, Liu S, Ding K, Li H, Li B. Investigations on Field Distribution along the Earth’s Surface of a Submerged Line Current Source Working at Extremely Low Frequency Band. Electronics. 2022; 11(7):1116. https://doi.org/10.3390/electronics11071116
Chicago/Turabian StyleYang, Ke, Jinhong Wang, Shuwen Liu, Kai Ding, Hao Li, and Bin Li. 2022. "Investigations on Field Distribution along the Earth’s Surface of a Submerged Line Current Source Working at Extremely Low Frequency Band" Electronics 11, no. 7: 1116. https://doi.org/10.3390/electronics11071116
APA StyleYang, K., Wang, J., Liu, S., Ding, K., Li, H., & Li, B. (2022). Investigations on Field Distribution along the Earth’s Surface of a Submerged Line Current Source Working at Extremely Low Frequency Band. Electronics, 11(7), 1116. https://doi.org/10.3390/electronics11071116