
Efficient Route Planning Using Temporal Reliance of Link Quality for Highway IoV Traffic Environment

 , ,
, ,  ,
,  and
and 
Abstract
:1. Introduction
- (1)
- Firstly, geometrical localization for GPS outage is presented to know the GPS locations of the vehicles.
- (2)
- Secondly, a temporal link quality estimation model is proposed to capture the tendency of future link quality and residual link lifetime for the underlying structure for the vehicular traffic mobility model for highways.
- (3)
- Thirdly, a new kind of geocast routing is proposed using geometrical localization, temporal transmission probability, and residual link lifetime under shadowing fading condition for a highway traffic environment.
- (4)
- Finally, to show the benefit of the proposed routing, a comparison is made with state-of-the-art works in terms of one-hop link disconnection, throughput, and delay.
2. Related Work
2.1. GPS-Location-Based Geocast Routing without Link Quality
2.2. GPS-Location-Based Geocast Routing with Link Quality
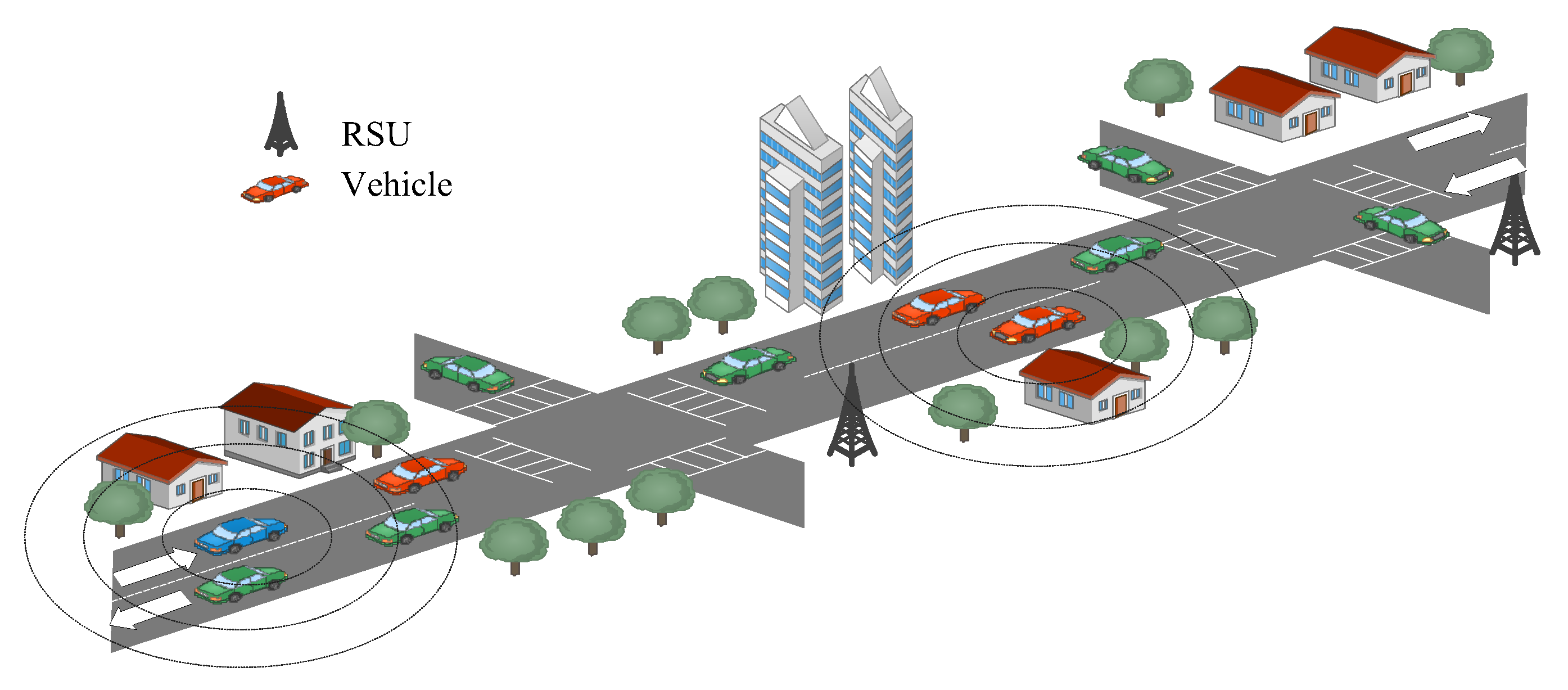
3. The Proposed EGR Approach for Highway Traffic Environment
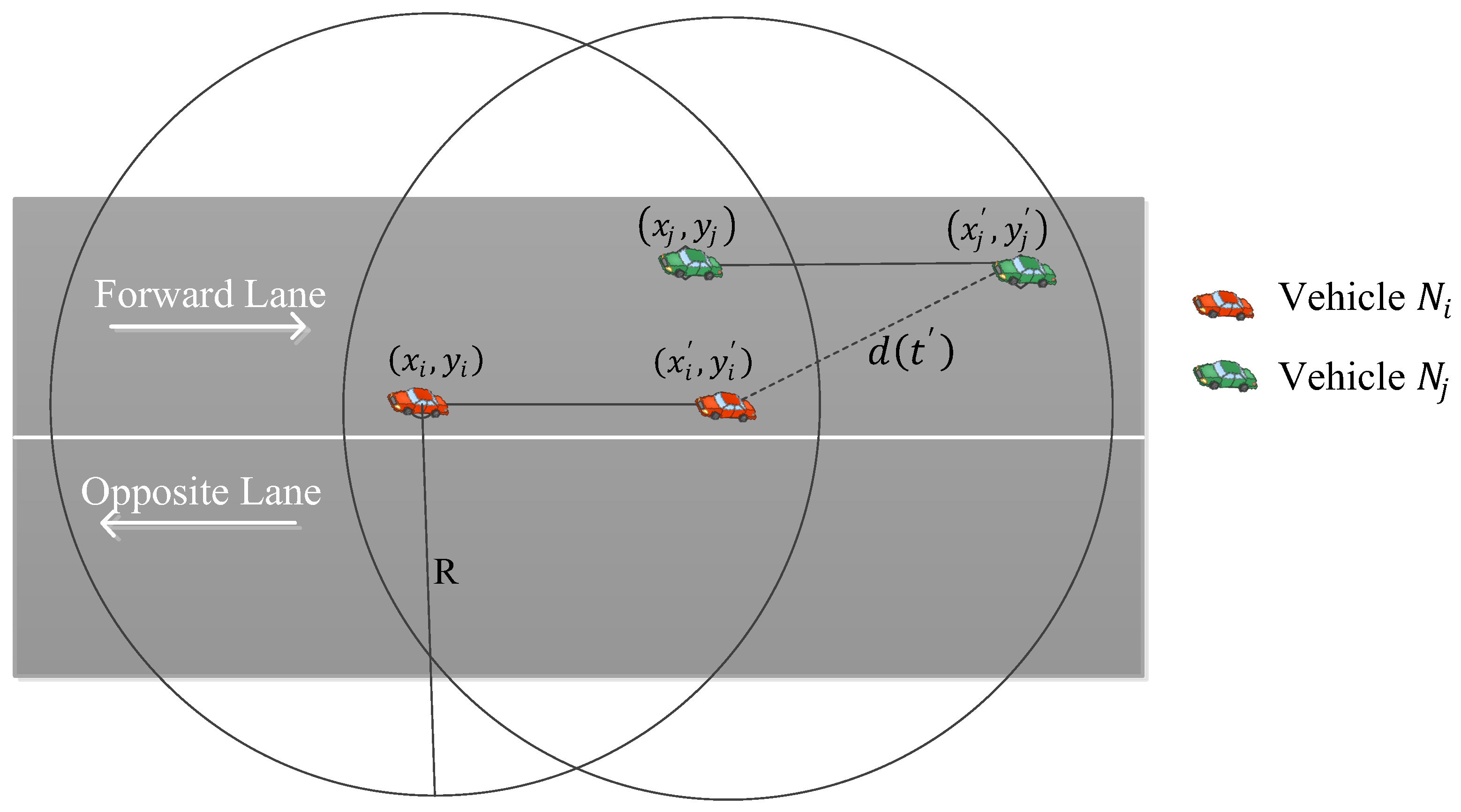
3.1. Highway Traffic Environment
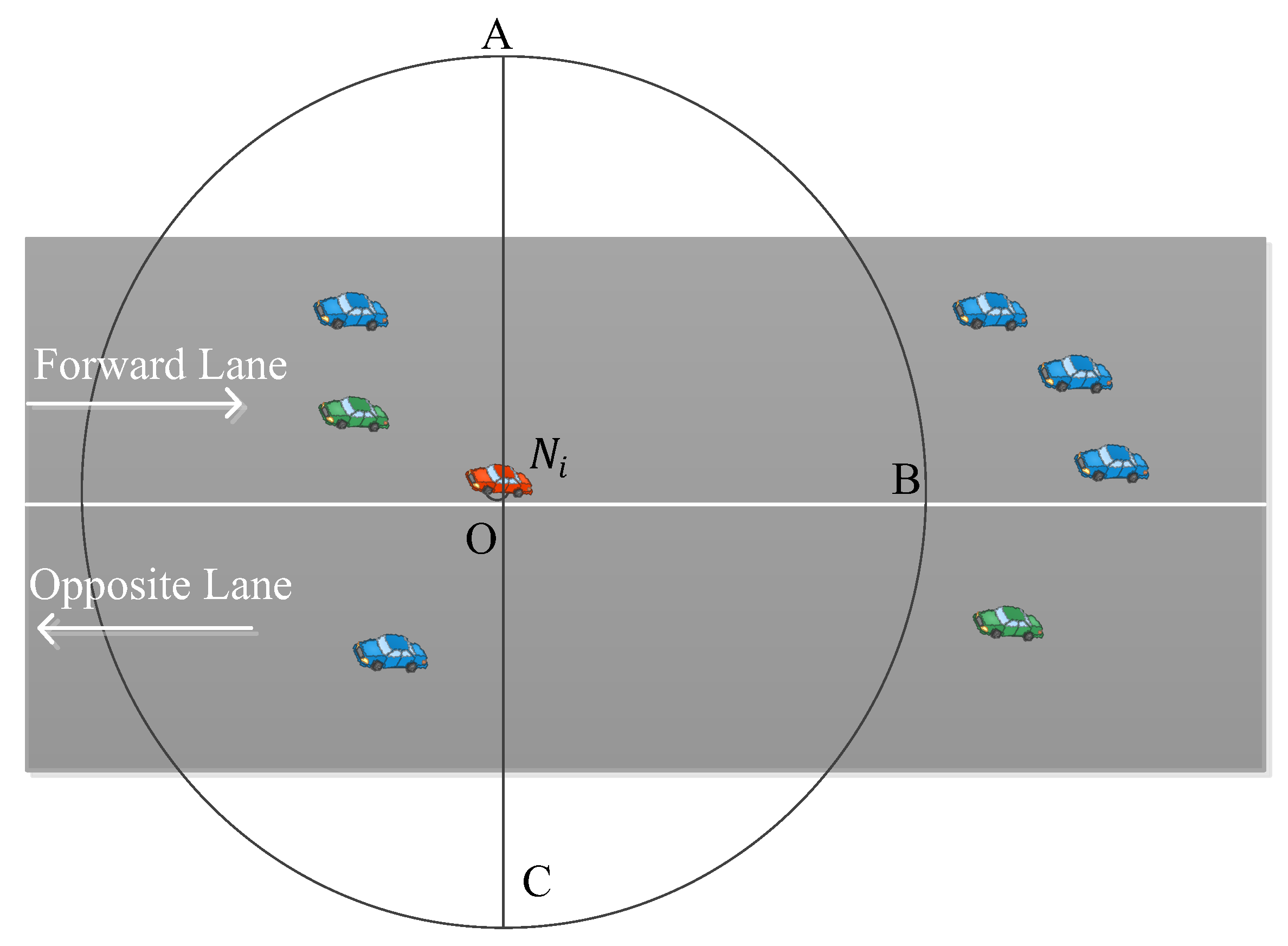
3.2. Geometrical Localization for GPS Outage
3.3. Temporal Link Quality Estimation Model
- (a)
- Temporal Transmission Probability
- (b)
- The Residual Link-Lifetime
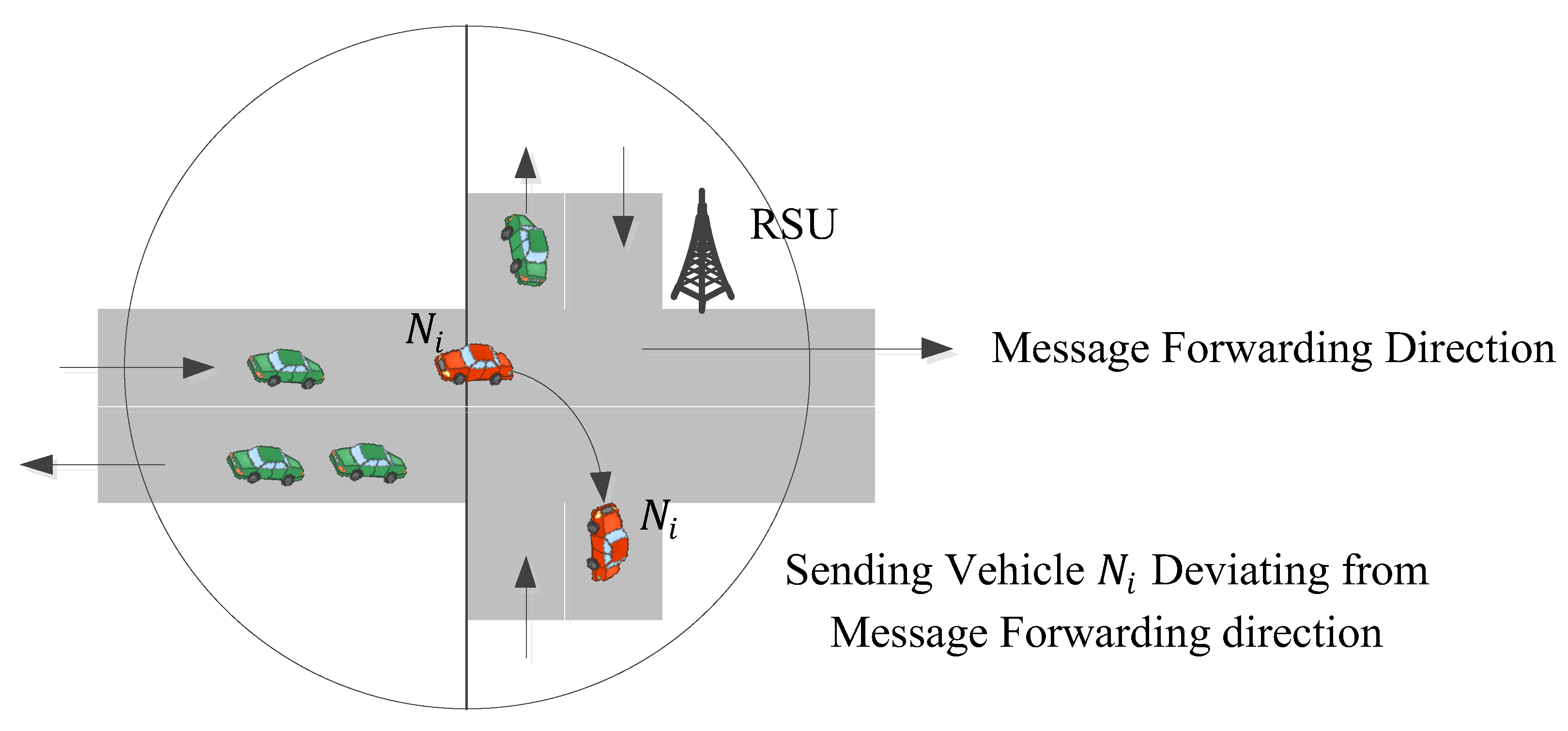
3.4. Geocast Routing
- The residual link lifetime of the radio link between both the vehicles is greater than the round trip time .
- The temporal distance between the sending vehicle and vehicle should be high.
- The product of the temporal distance and temporal transmission probability between the sending vehicle and vehicle should be high.
- The vehicle has at least one neighboring vehicle that is moving in a forward lane.
- The temporal distance between and is minimal, and the temporal transmission probability of the link between vehicle and vehicle should be high.
- Use a RSU in case no neighboring vehicle is present.
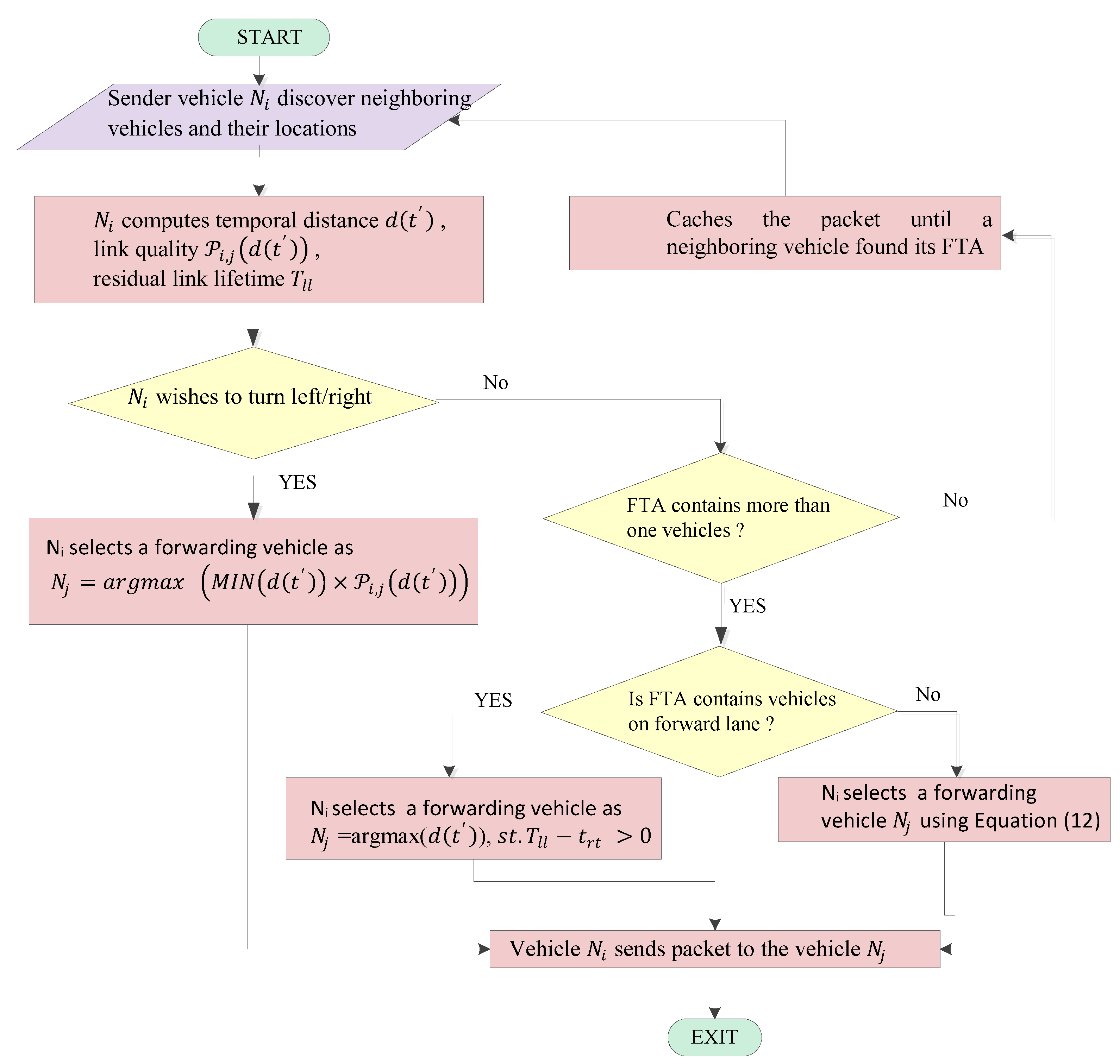
3.5. The Route Construction Algorithm
- Neighbor Discovery: Every vehicle sends HELLO packets in its FTA including its coordinates. When a vehicle receives a HELLO packet, it responds with an “ECHO” packet containing positional data. Every vehicle creates a list of its neighbors after receiving these ECHO packets. Only those vehicles that are included in the relevant FTA will be included in the list.
- Residual Link Lifetime Calculation: The sender estimates the residual link lifetime and temporal transmission probability that will be used to find the best forwarding vehicle among the discovered neighboring vehicles, as shown in step 2.
- Route Computation: In step 3, the EGR searches for forwarding vehicle using residual link lifetime and temporal transmission probability.
| Algorithm 1. EGR Algorithm |
| Input: , , , , and Output: forwarding vehicle
|
4. Simulation and Performance Analysis
4.1. Simulation Environment
4.2. Simulation Metrics
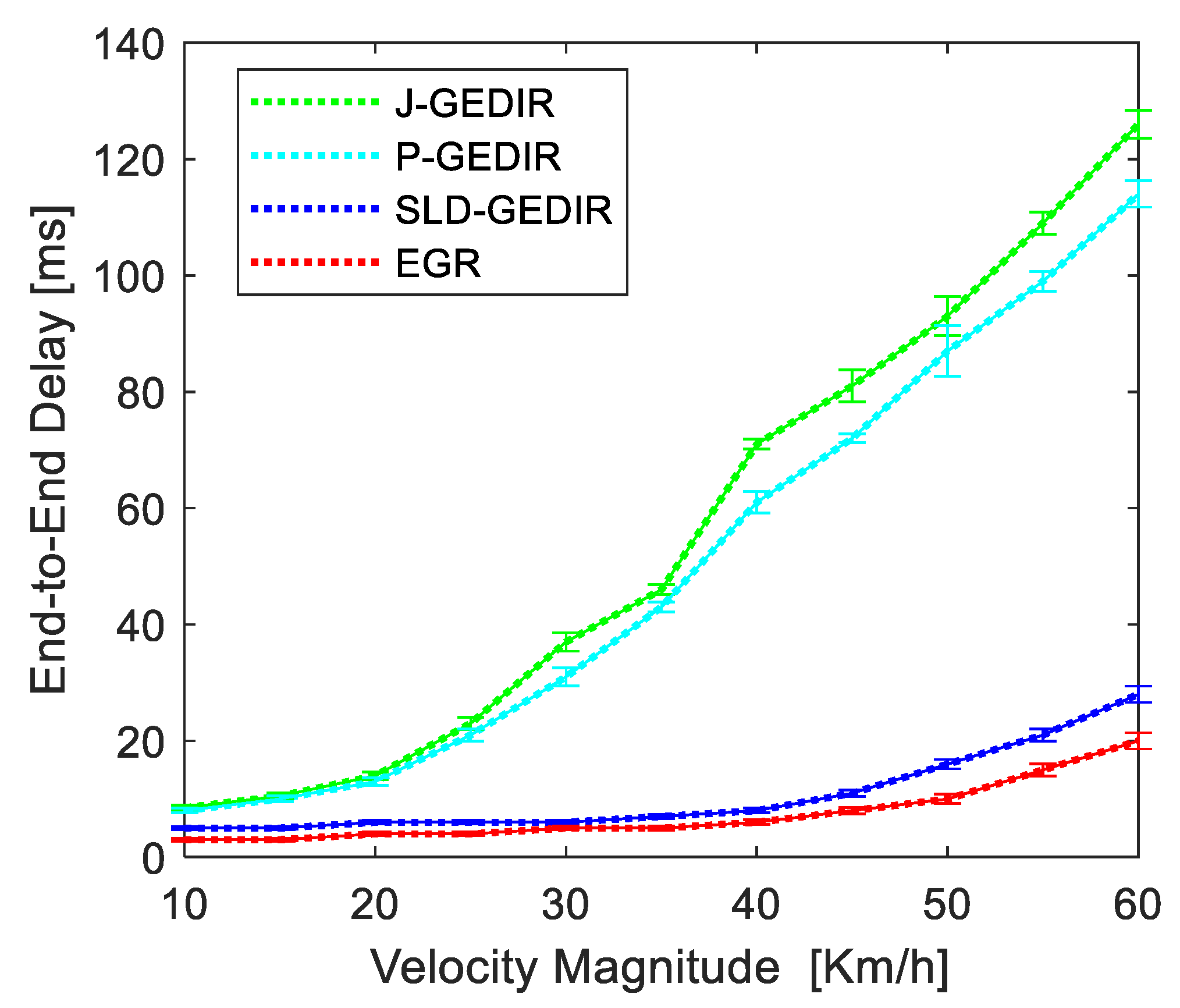
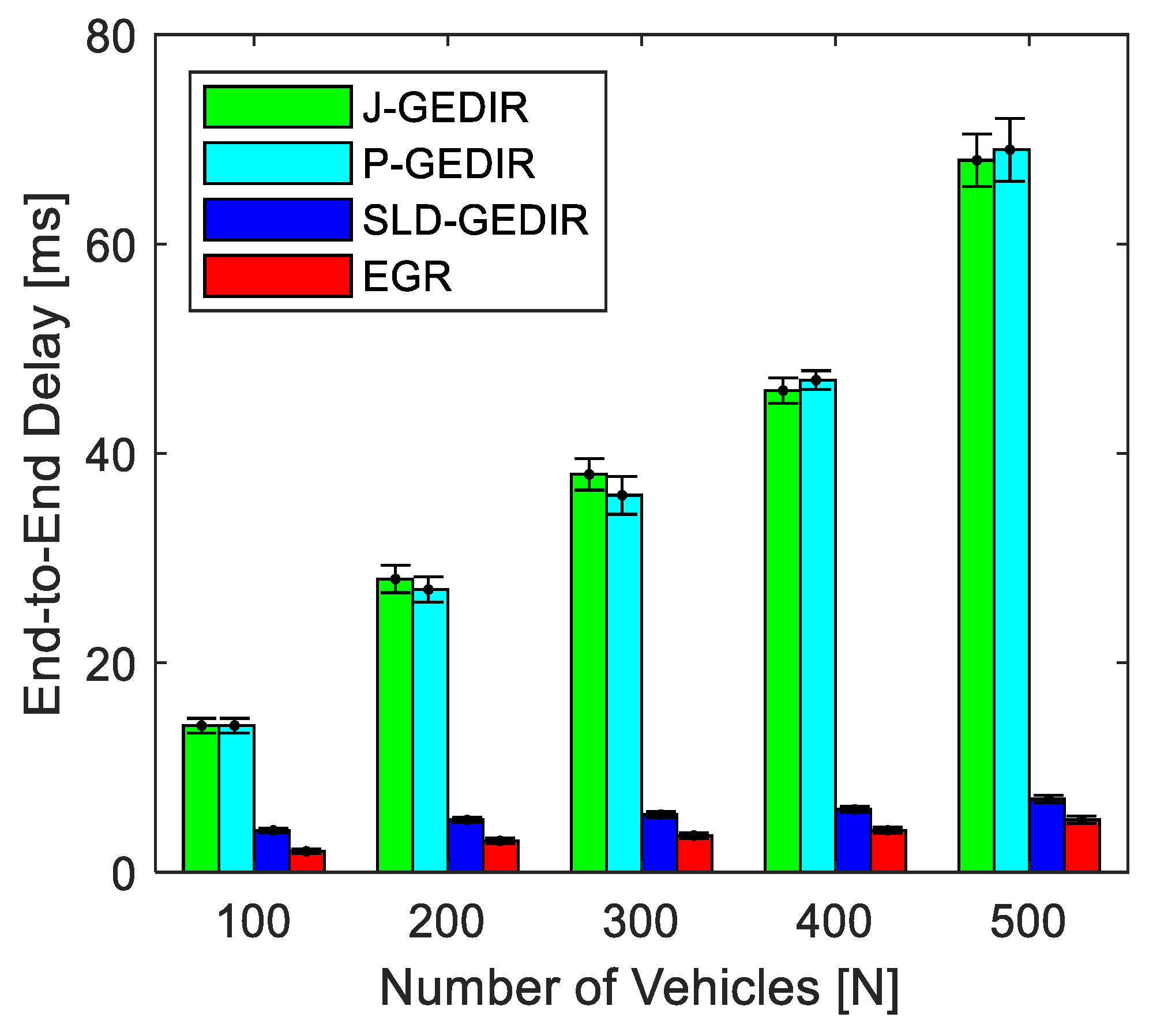
- End-to-End delay: End-to-end delay is the amount of time for moving a packet from the source to the destination across a network. It is the sum of the delays experienced during transmission, propagation, and processing via each link from the source to the destination. Equation (14) represents the statistical formula that can be used to determine end-to-end delay () in terms of milliseconds and is given by
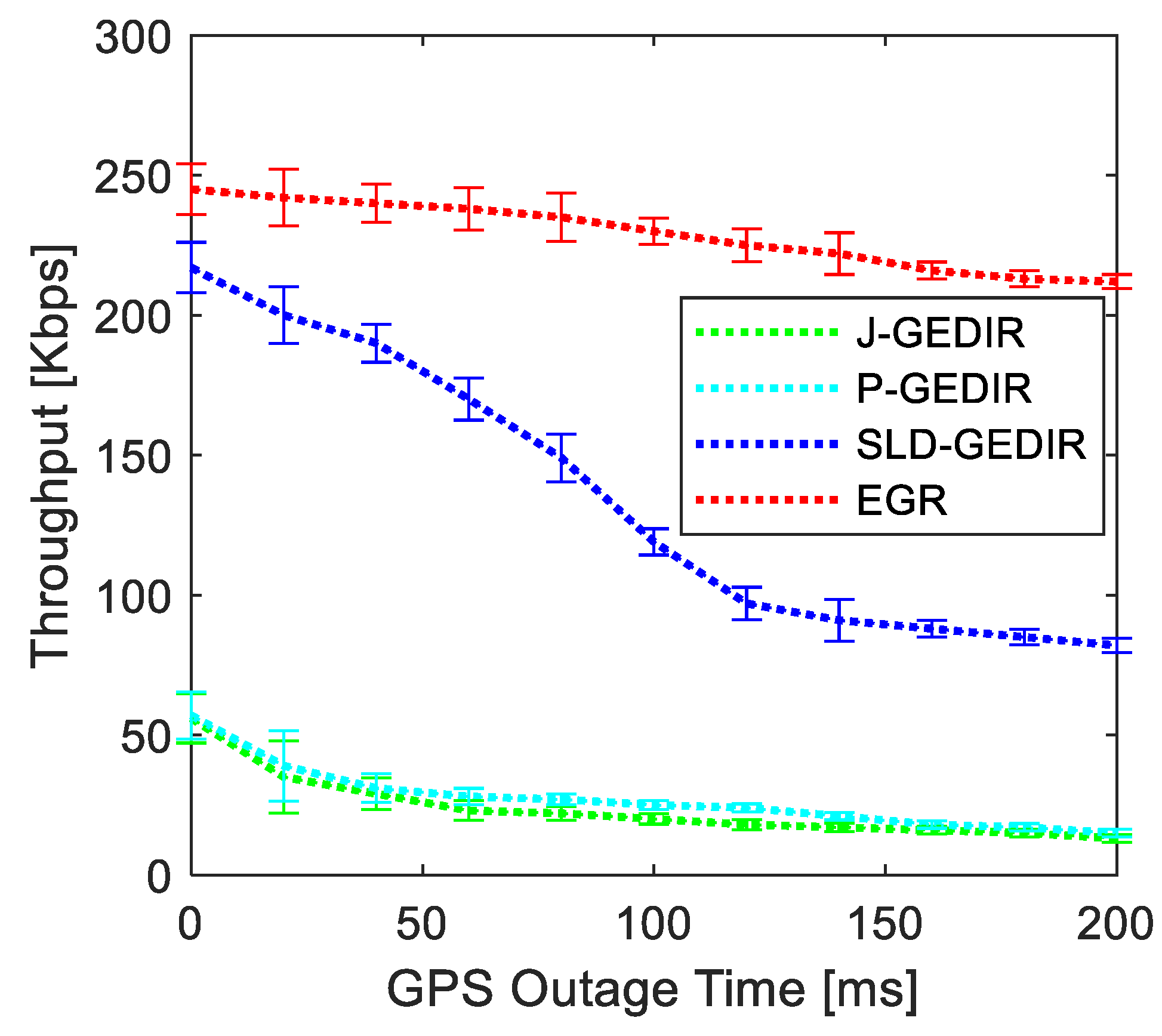
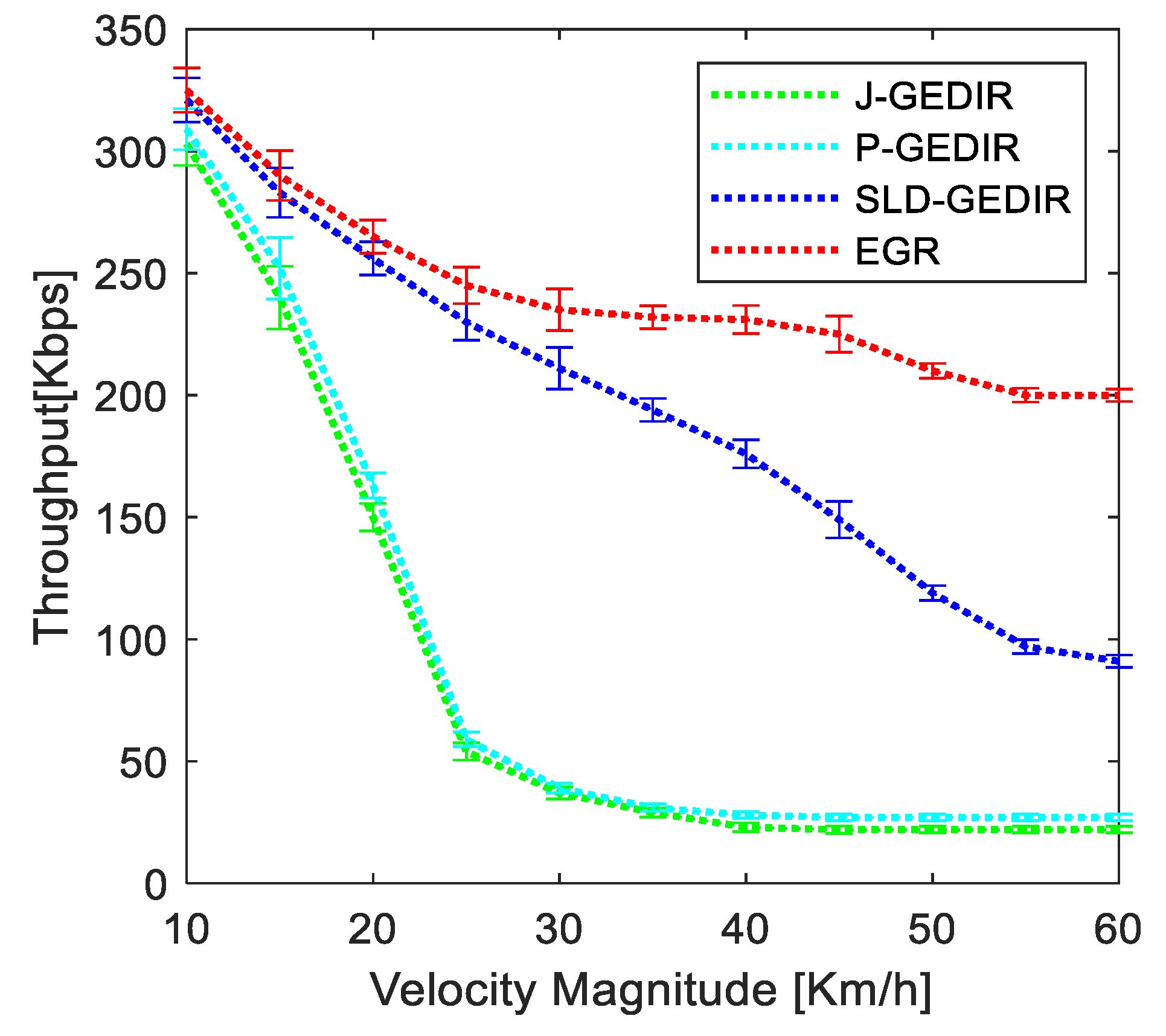
- Throughput: The throughput is the quantity of packets effectively sent to the destination in a unit simulation time. Bits per second are used to measure it. The limited number of forwarding possibilities available on the highway is due to the fact that there are alternative forms of transportation accessible, and intercity traffic is not extremely heavy. Equation (15), a statistical expression representing throughput (), is given by
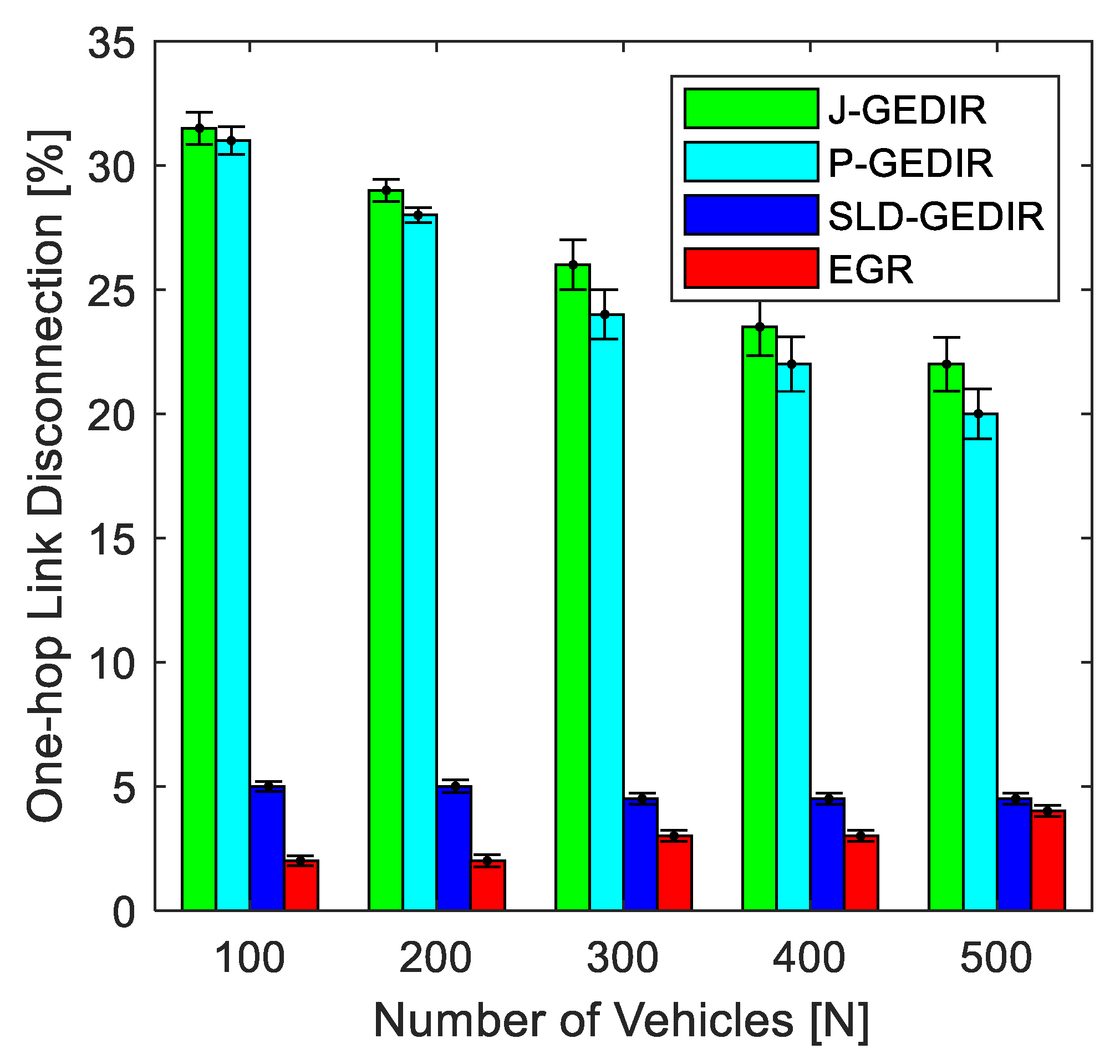
- One-hop Link Disconnection: One-hop link disconnection is the number of unsuccessful attempts at packet transmission. The reliability of a link is demonstrated by this measure. It affirms the effectiveness of the forwarding vehicle selection process. Equation (16) represents the arithmetical formula that used to quantify one-hop link disconnection ().
4.3. Performance Analysis
- (a)
- Performance Analysis Under GPS Outage
- (b)
- Performance Analysis Under Vehicle Mobility
- (c)
- Performance Analysis Under Vehicle Density
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kaiwartya, O.; Abdullah, A.H.; Cao, Y.; Altameem, A.; Prasad, M.; Lin, C.-T.; Liu, X. Internet of Vehicles: Motivation, Layered Architecture, Network Model, Challenges, and Future Aspects. IEEE Access 2016, 4, 5356–5373. [Google Scholar] [CrossRef]
- Li, Y.; Barthelemy, J.; Sun, S.; Perez, P.; Moran, B. Urban Vehicle Localization in Public LoRaWan Network. IEEE Internet Things J. 2021, 9, 10283–10294. [Google Scholar] [CrossRef]
- Kaiwartya, O.; Kumar, S. Guaranteed Geocast Routing Protocol for Vehicular Adhoc Networks in Highway Traffic Environment. Wirel. Pers. Commun. 2015, 83, 2657–2682. [Google Scholar] [CrossRef]
- Kumar, S.; Dohare, U.; Kumar, K.; Dora, D.P.; Qureshi, K.N.; Kharel, R. Cybersecurity Measures for Geocasting in Vehicular Cyber Physical System Environments. IEEE Internet Things J. 2018, 6, 5916–5926. [Google Scholar] [CrossRef]
- Kaiwartya, O.; Cao, Y.; Lloret, J.; Kumar, S.; Aslam, N.; Kharel, R.; Abdullah, A.H.; Shah, R.R. Geometry-Based Localization for GPS Outage in Vehicular Cyber Physical Systems. IEEE Trans. Veh. Technol. 2018, 67, 3800–3812. [Google Scholar] [CrossRef] [Green Version]
- Blum, J.; Eskandarian, A.; Hoffman, L. Challenges of Intervehicle Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2004, 5, 347–351. [Google Scholar] [CrossRef]
- Sofra, N.; Gkelias, A.; Leung, K.K. Route Construction for Long Lifetime in VANETs. IEEE Trans. Veh. Technol. 2011, 60, 3450–3461. [Google Scholar] [CrossRef] [Green Version]
- U.S. Department of Transportation. ITS Strategic Plan 2015–2019. Available online: http://www.its.dot.gov/research_areas/strategicplan2015.htm (accessed on 10 October 2022).
- Fawcett, J.; Robinson, P. Adaptive routing for road traffic. IEEE Comput. Graph. Appl. 2000, 20, 46–53. [Google Scholar] [CrossRef] [Green Version]
- Ammoun, S.; Nashashibi, F.; Laurgeau, C. Crossroads risk assessment using GPS and inter-vehicle communications. IET Intell. Transp. Syst. 2007, 1, 95–101. [Google Scholar] [CrossRef]
- Wu, D.; Zhang, Y.; Bao, L.; Regan, A.C. Location-Based Crowdsourcing for Vehicular Communication in Hybrid Networks. IEEE Trans. Intell. Transp. Syst. 2013, 14, 837–846. [Google Scholar] [CrossRef]
- Cui, Y.; Ge, S.S. Autonomous vehicle positioning with GPS in urban canyon environments. IEEE Trans. Robot. Autom. 2003, 19, 15–25. [Google Scholar]
- Kaiwartya, O.; Kumar, S. Geocasting in vehicular adhoc networks using particle swarm optimization. In Proceedings of the International Conference on Information Systems and Design of Communication Lisbon, Lisboa, Portugal, 16–17 May 2014; pp. 62–66. [Google Scholar]
- Tsiachris, S.; Koltsidas, G.; Pavlidou, F.-N. Junction-Based Geographic Routing Algorithm for Vehicular Ad hoc Networks. Wirel. Pers. Commun. 2012, 71, 955–973. [Google Scholar] [CrossRef]
- Raw, R.S.; Das, S. Performance analysis of P-GEDIR protocol for vehicular adhoc network in urban traffic environments. Wirel. Pers. Commun. 2013, 68, 65–78. [Google Scholar] [CrossRef]
- Stojmenovic, I.; Ruhil, A.P.; Lobiyal, D.K. Voronoi diagram and convex hull based geocasting and routing in wireless networks. Wirel. Commun. Mob. Comput. 2006, 6, 247–258. [Google Scholar] [CrossRef]
- Kaiwartya, O.; Kumar, S.; Lobiyal, D.K.; Abdullah, A.H.; Hassan, A.N. Performance Improvement in Geographic Routing for Vehicular Ad Hoc Networks. Sensors 2014, 14, 22342–22371. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sangho, O.; Jaewon, K.; Gruteser, M. Location-based flooding techniques for Vehicular emergency messaging (D-Flooding). In Proceedings of the 2006 Third Annual International Conference on Mobile and Ubiquitous Systems: Networking & Services, San Jose, CA, USA, 17–21 July 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 1–9. [Google Scholar]
- Maihofer, C.; Eberhardt, R. Geocast in vehicular environments: Caching and transmission range control for improved efficiency (CTRC). In Proceedings of the 2004 Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 951–956. [Google Scholar]
- Raw, R.S.; Lobiyal, D.K. B-MFR routing protocol for vehicular ad hoc networks. In Proceedings of the 2010 International Conference on Networking and Information Technology (ICNIT), Manila, Philippines, 11–12 June 2010; pp. 420–423. [Google Scholar]
- Sommer, C.; Tonguz, O.K.; Dressler, F. Traffic information systems: Efficient message dissemination via adaptive beaconing. IEEE Commun. Mag. 2011, 49, 173–179. [Google Scholar] [CrossRef] [Green Version]
- Qing, Y.; Lim, A.; Shuang, L.; Jian, F.; Agrawal, P. ACAR: Adaptive Connectivity Aware Routing Protocol for Vehicular Ad Hoc Networks. In Proceedings of the 17th International Conference on Computer Communications and Networks, ICCCN’08, Saint Thomas, VI, USA, 3–7 August 2008; pp. 1–6. [Google Scholar]
- Kaiwartya, O.; Kumar, S. Cache agent-based geocasting in VANETs. Int. J. Inf. Commun. Technol. 2015, 7, 562. [Google Scholar] [CrossRef]
- Kasana, R.; Kumar, S. Multimetric Next Hop Vehicle Selection for Geocasting in Vehicular Ad-hoc Networks. In Proceedings of the 2015 IEEE International Conference on Computational Intelligence & Communication Technology, Ghaziabad, India, 13–14 February 2015; pp. 400–405. [Google Scholar]
- Li, Z.; Wu, P. Intermittent geocast routing in urban vehicular delay tolerant networks. Tsinghua Sci. Technol. 2016, 21, 630–642. [Google Scholar] [CrossRef]
- Karimi, R.; Shokrollahi, S. PGRP: Predictive geographic routing protocol for VANETs. Comput. Netw. 2018, 141, 67–81. [Google Scholar] [CrossRef]
- Kasana, R.; Kumar, S.; Kaiwartya, O.; Yan, W.; Cao, Y.; Abdullah, A.H. Location error resilient geographical routing for vehicular ad-hoc networks. IET Intell. Transp. Syst. 2017, 11, 450–458. [Google Scholar] [CrossRef] [Green Version]
- Oliveira, H.A.; Nakamura, E.F.; Loureiro, A.A.; Boukerche, A. Error analysis of localization systems for sensor networks. In Proceedings of the 13th Annual ACM International Workshop on Geographic Information Systems, New York, NY, USA, 4–5 November 2005; ACM: New York, NY, USA, 2005; pp. 71–78. [Google Scholar]
- Qureshi, K.N.; Islam, F.U.; Kaiwartya, O.; Kumar, A.; Lloret, J. Improved Road Segment-Based Geographical Routing Protocol for Vehicular Ad-hoc Networks. Electronics 2020, 9, 1248. [Google Scholar] [CrossRef]
- Bai, X.; Chen, S.; Shi, Y.; Liang, C.; Lv, X. Blockchain-based Authentication and Proof-of-Reputation Mechanism for Trust Data Sharing in Internet of Vehicles. Adhoc Sens. Wirel. Netw. 2022, 53, 85–113. [Google Scholar]
- Pandey, P.K.; Kansal, V.; Swaroop, A. ALMR: Alternate Link Based Multipath Reactive Routing Protocol for Vehicular Ad Hoc Networks (VANETs). Adhoc Sens. Wirel. Netw. 2021, 50, 27–53. [Google Scholar]
- Rathore, R.; Sangwan, S.; Kaiwartya, O. Towards Trusted Green Computing for Wireless Sensor Networks: Multi Metric Optimization Approach. Ad Hoc Sens. Wirel. Netw. 2021, 49, 131–171. [Google Scholar]
- Hizal, S.; Zengin, A. QEAODV: A New Routing Protocol based on Quality of Service in MANETs. Adhoc Sens. Wirel. Netw. 2021, 49, 81–109. [Google Scholar]
- Prasad, M.; Liu, Y.-T.; Li, D.-L.; Lin, C.-T.; Shah, R.R.; Kaiwartya, O.P. A New Mechanism for Data Visualization with Tsk-Type Preprocessed Collaborative Fuzzy Rule Based System. J. Artif. Intell. Soft Comput. Res. 2017, 7, 33–46. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Total time | Ifqlen | packets | |
| Simulation area | Channel type | Wireless | |
| Vehicle speed | Antenna model | Omni directional | |
| Number of vehicles | vehicles | Propagation model | Shadowing |
| Source vehicles | MAC data rate | ||
| Tranmission range | 300 m | MAC protocol | IEEE 802.11p |
| Junction | 8 | CBR rate | |
| Hello timeout | Packet type | UDP | |
| Query period | Packet size | 512 bytes | |
| Traffic type | CBR | Geocast region size |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yaduwanshi, R.; Kumar, S.; Kumar, A.; Kaiwartya, O.; Deepti; Aljaidi, M.; Lloret, J. Efficient Route Planning Using Temporal Reliance of Link Quality for Highway IoV Traffic Environment. Electronics 2023, 12, 130. https://doi.org/10.3390/electronics12010130
Yaduwanshi R, Kumar S, Kumar A, Kaiwartya O, Deepti, Aljaidi M, Lloret J. Efficient Route Planning Using Temporal Reliance of Link Quality for Highway IoV Traffic Environment. Electronics. 2023; 12(1):130. https://doi.org/10.3390/electronics12010130
Chicago/Turabian StyleYaduwanshi, Ritesh, Sushil Kumar, Arvind Kumar, Omprakash Kaiwartya, Deepti, Mohammad Aljaidi, and Jaime Lloret. 2023. "Efficient Route Planning Using Temporal Reliance of Link Quality for Highway IoV Traffic Environment" Electronics 12, no. 1: 130. https://doi.org/10.3390/electronics12010130
APA StyleYaduwanshi, R., Kumar, S., Kumar, A., Kaiwartya, O., Deepti, Aljaidi, M., & Lloret, J. (2023). Efficient Route Planning Using Temporal Reliance of Link Quality for Highway IoV Traffic Environment. Electronics, 12(1), 130. https://doi.org/10.3390/electronics12010130