
Expansion Joints Risk Prediction System Based on IoT Displacement Device
Abstract
:1. Introduction
2. Related Works
2.1. Expansion Joint and Bridge Inspection
2.2. IoT Displacement Measurement Device
3. Proposed Scheme
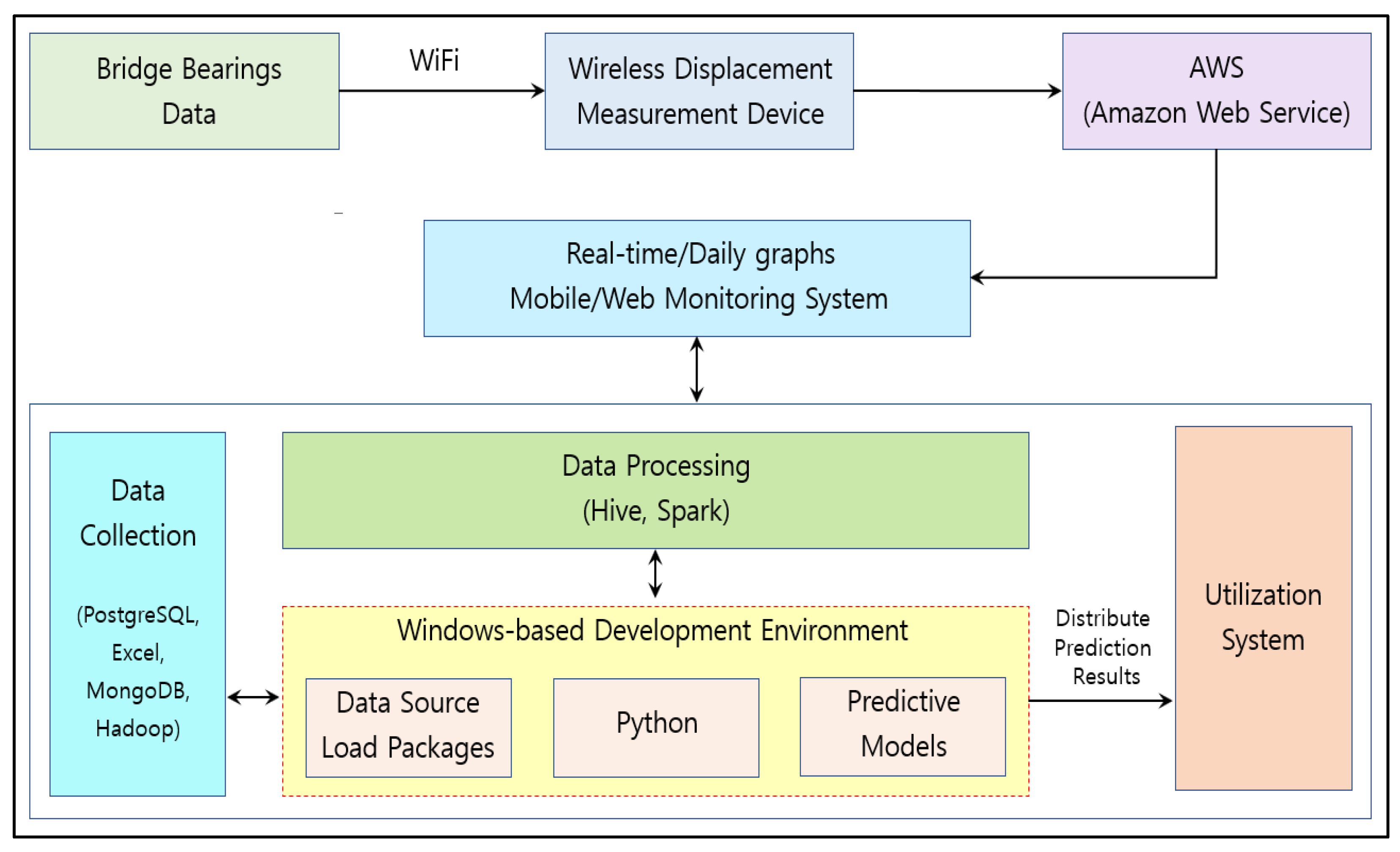
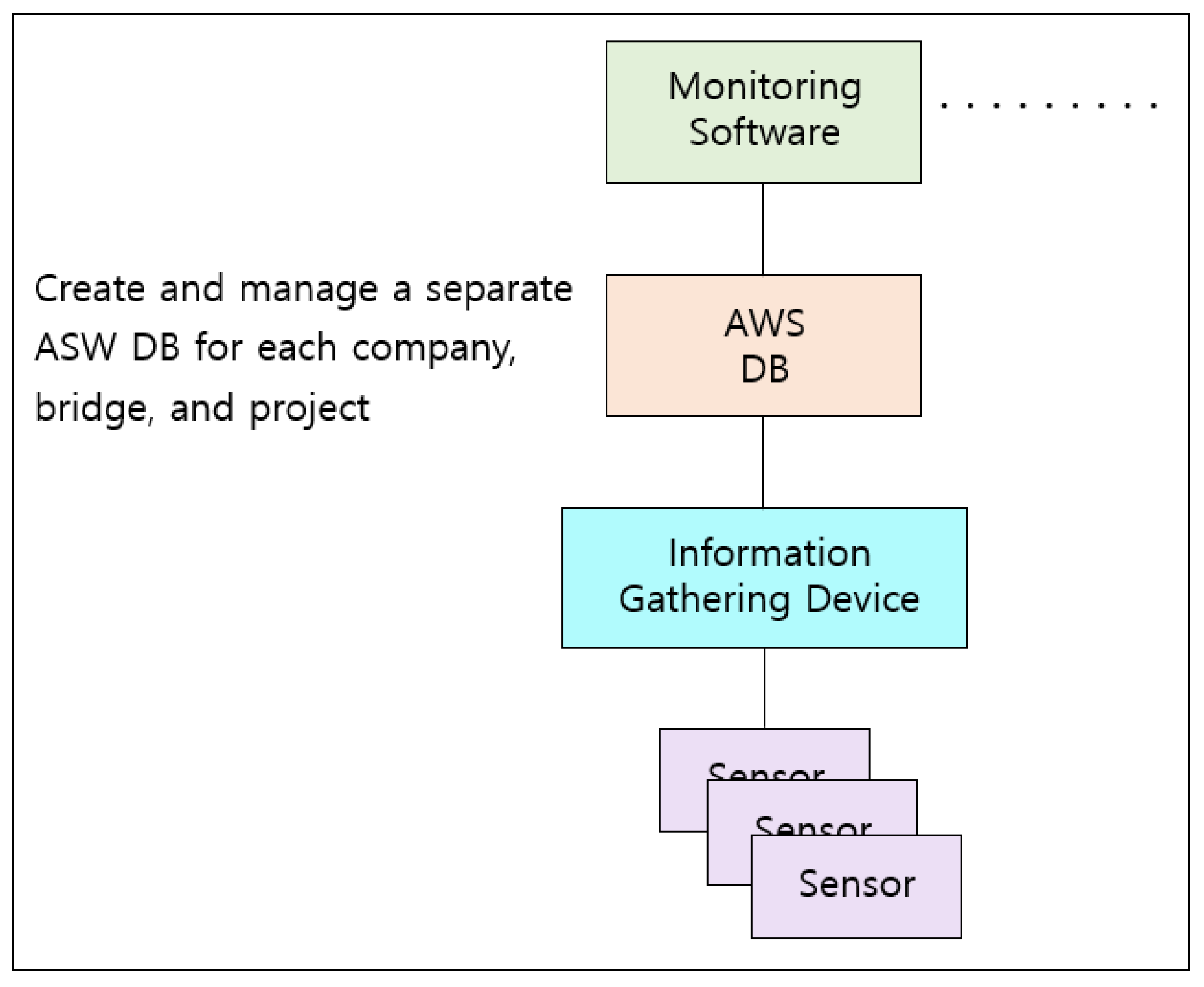
3.1. Architecture of the Proposed System
3.2. Wireless Displacement Measurement Device
3.2.1. Design of Wireless Displacement Measurement Device
3.2.2. H/W Implementation and Precision Measurement
3.3. S/W Implementation and Design
Design
4. Test Device Making
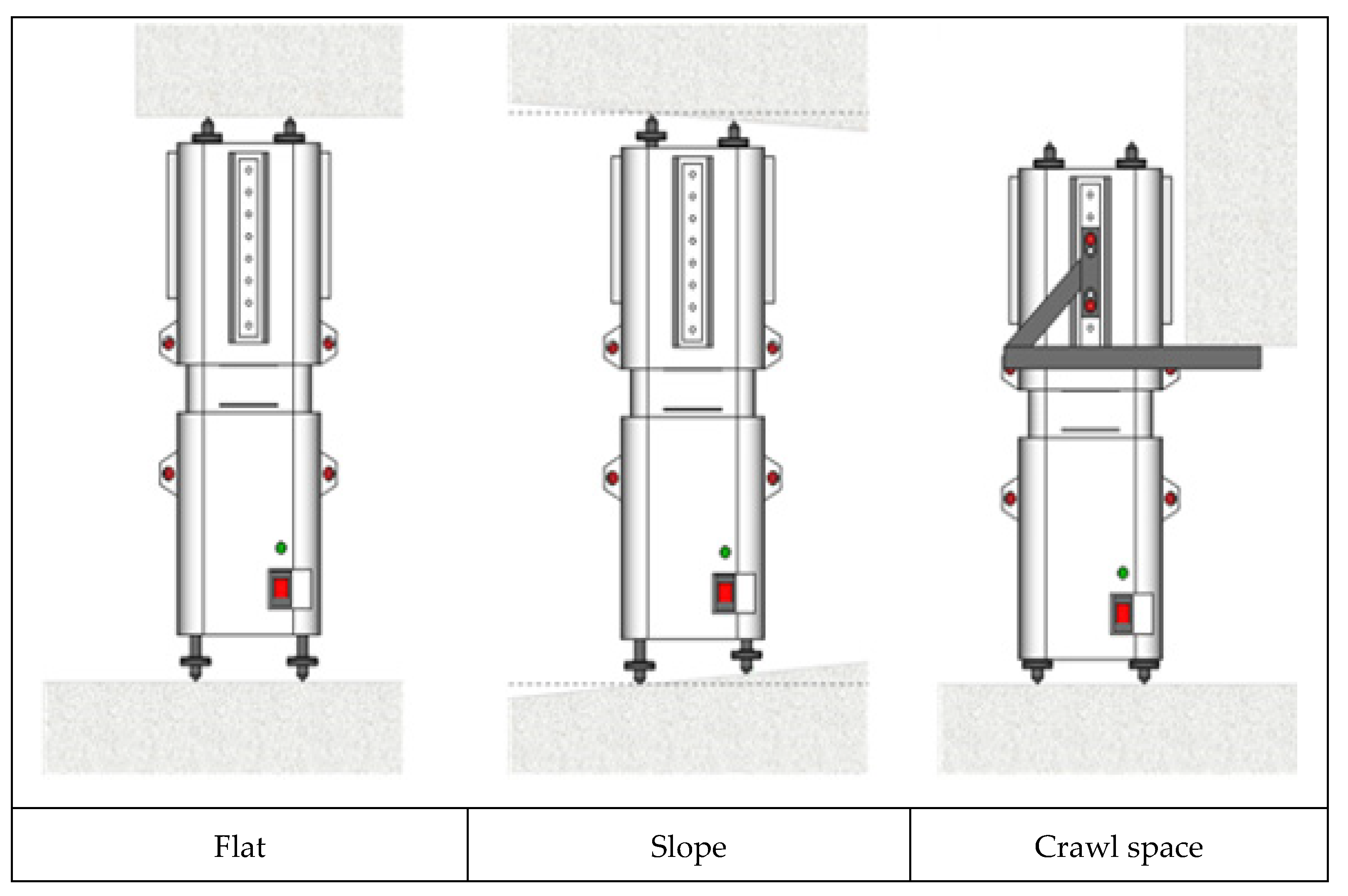
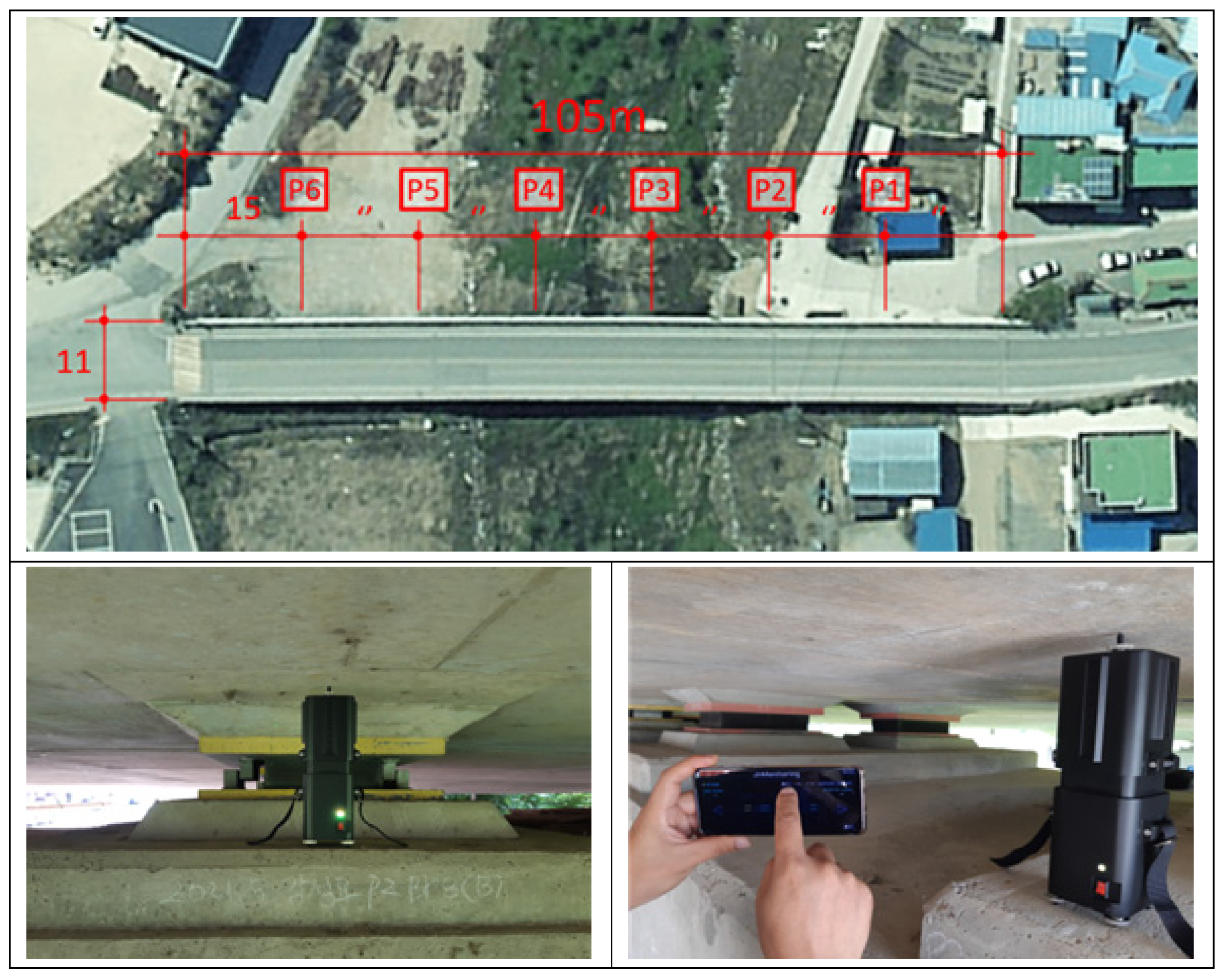
4.1. Experiment of the Simulated Bridge
4.2. Factor
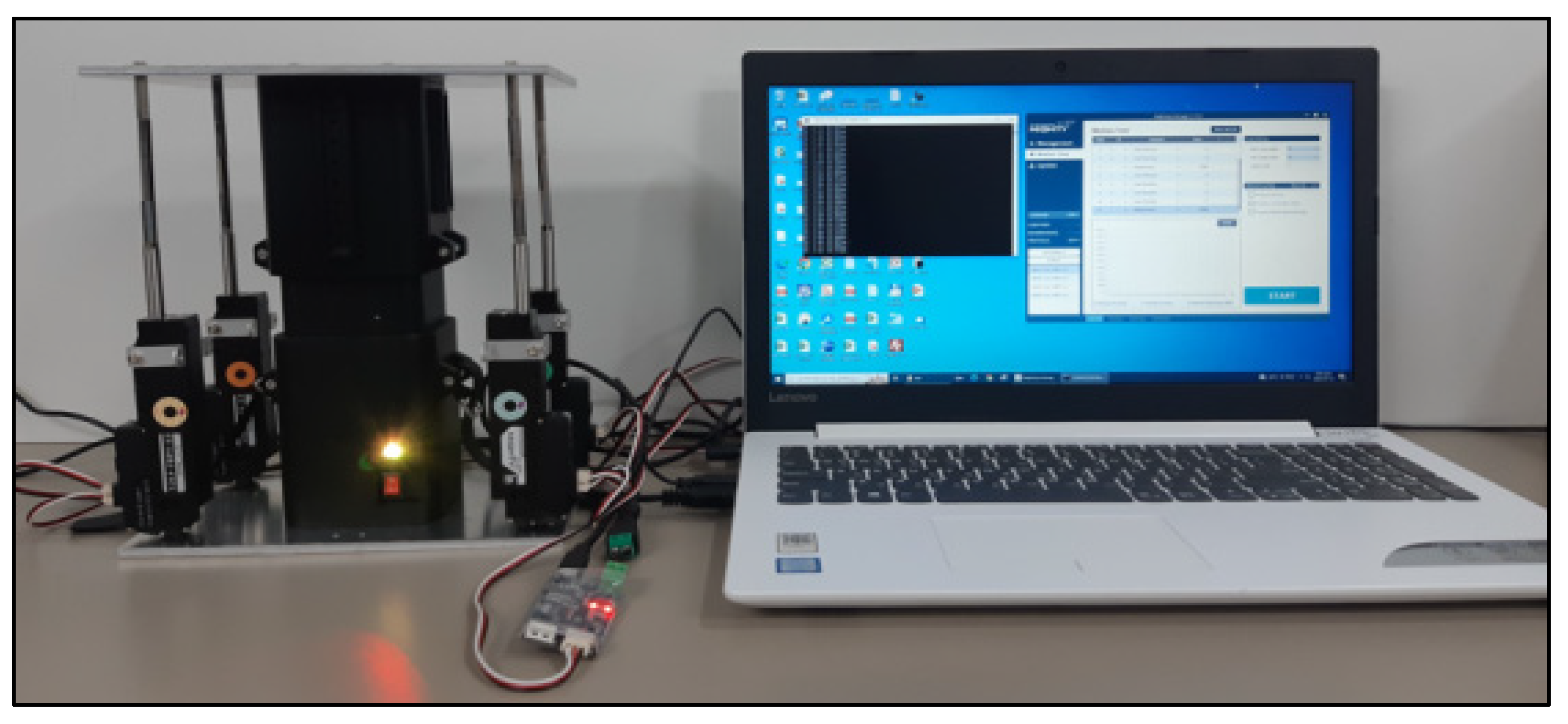
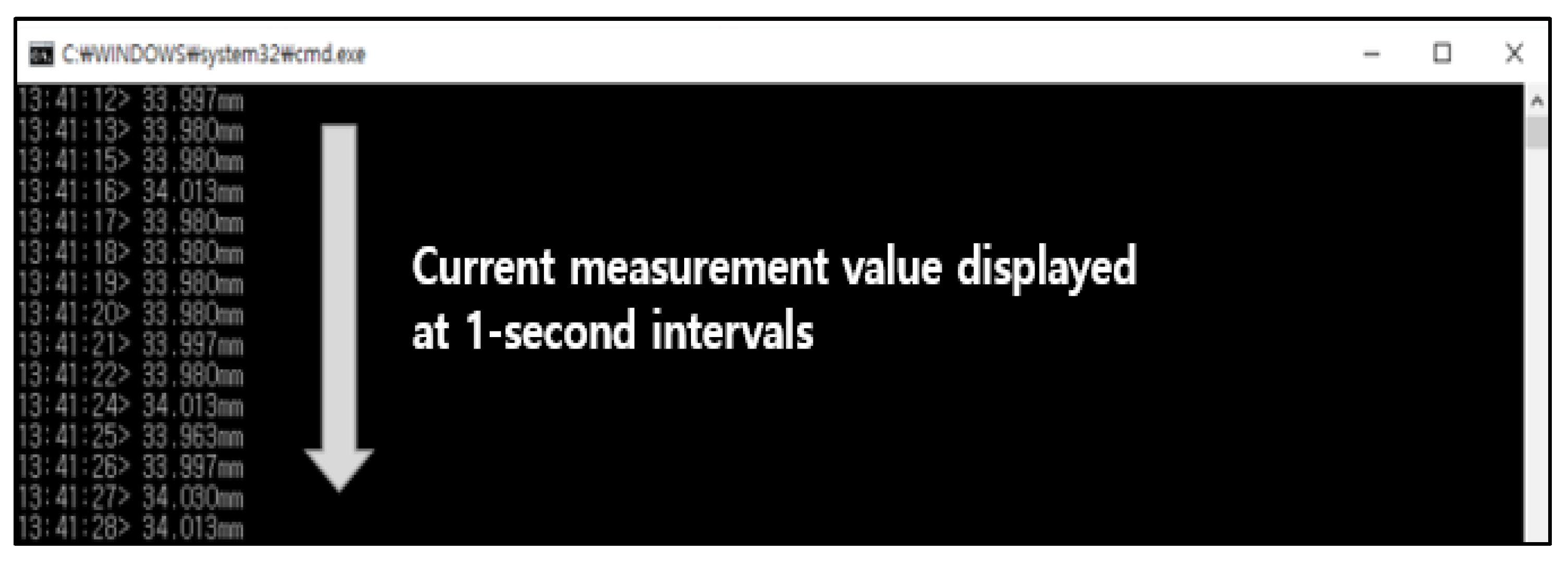
4.3. Testing and Data Acquisition
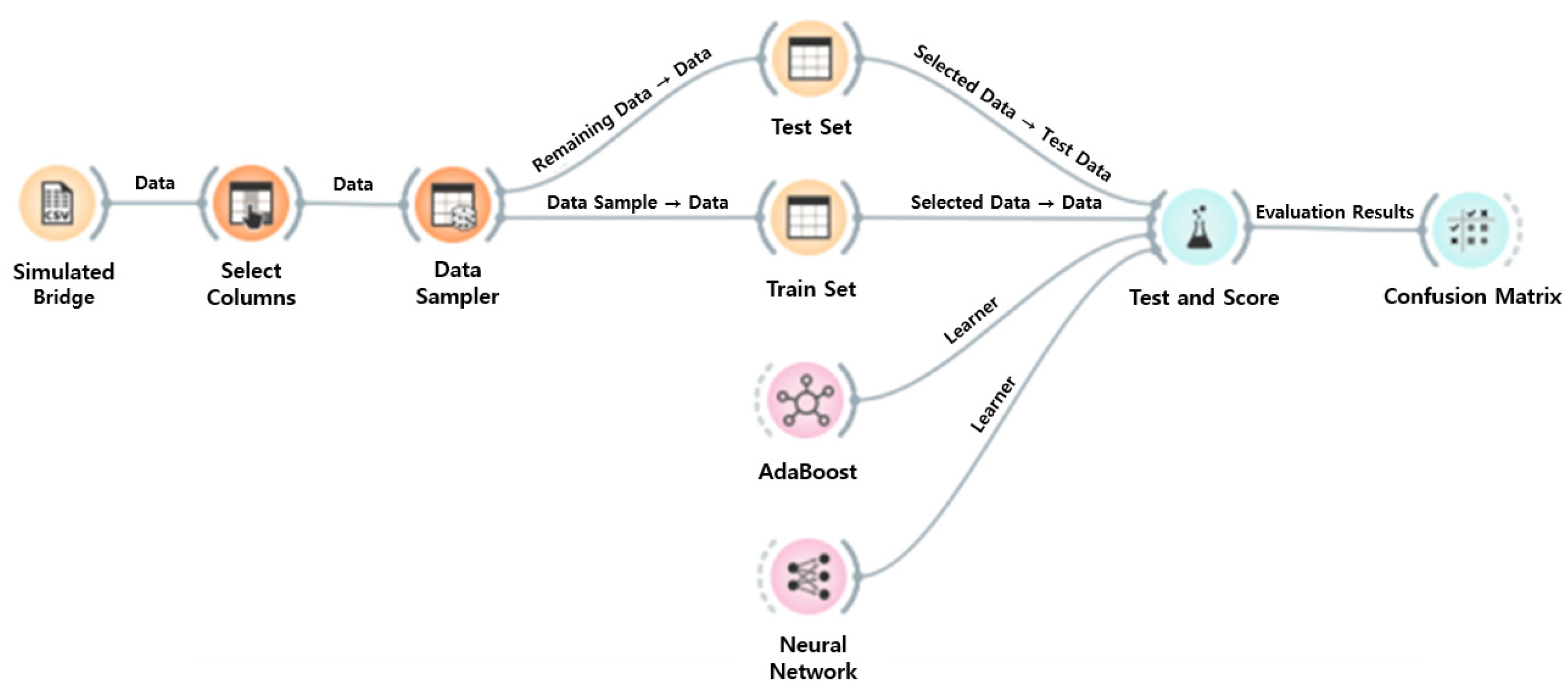
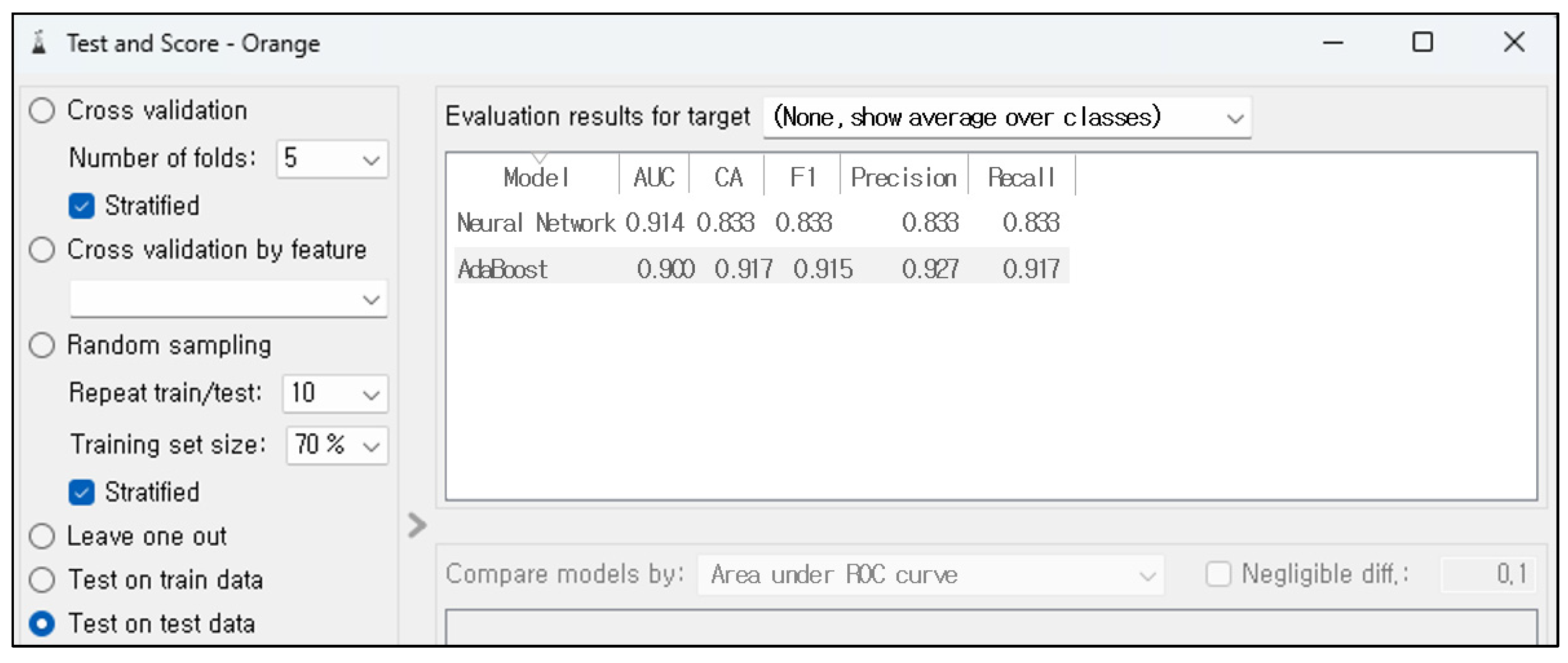
4.4. AI Model Training and Evaluation
4.5. IoT Data Processing
4.6. Development of AI Model
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Malla, R.B.; Shaw, M.T.; Shrestha, M.R.; Brijmohan, S.B. Development and laboratory analysis of silicone foam sealant for bridge expansion joints. J. Bridge Eng. 2007, 12, 438–448. [Google Scholar] [CrossRef]
- McCarthy, E.; Wright, T.; Padgett, J.E.; DesRoches, R.; Bradford, P. Development of an experimentally validated analytical model for modular bridge expansion joint behavior. J. Bridge Eng. 2014, 19, 235–244. [Google Scholar] [CrossRef]
- Lima, J.M.; de Brito, J. Inspection survey of 150 expansion joints in road bridges. Eng. Struc. 2009, 31, 1077–1084. [Google Scholar] [CrossRef]
- Huang, H.B.; Yi, T.H.; Li, H.N.; Liu, H. New representative temperature for performance alarming of bridge expansion joints through temperature-displacement relationship. J. Bridge Eng. 2018, 23, 04018043. [Google Scholar] [CrossRef]
- Ni, Y.Q.; Wang, Y.W.; Zhang, C. A Bayesian approach for condition assessment and damage alarm of bridge expansion joints using long-term structural health monitoring data. Eng. Struc. 2020, 212, 110520. [Google Scholar] [CrossRef]
- Roberge, P.R. Corrosion Inspection and Monitoring; John Wiley & Sons: Hoboken, NJ, USA, 2007; ISBN 9780470099766. [Google Scholar]
- Komary, M.; Komarizadehasl, S.; Tošić, N.; Segura, I.; Lozano-Galant, J.A.; Turmo, J. Low-Cost Technologies Used in Corrosion Monitoring. Sensors 2023, 23, 1309. [Google Scholar] [CrossRef]
- Lei, J.; Lozano-Galant, J.A.; Xu, D.; Turmo, J. Structural system identification by measurement error-minimizing observability method. Struct. Control Health Monit. 2019, 26, e2425–e2444. [Google Scholar] [CrossRef]
- Kalybek, M.; Bocian, M.; Nikitas, N. Performance of Optical Structural Vibration Monitoring Systems in Experimental Modal Analysis. Sensors 2021, 21, 1239. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Khanmohammadi, M. Novel plastic hinge modification factors for damaged RC shear walls with bending performance. Adv. Concr. Constr. 2021, 12, 355–365. [Google Scholar] [CrossRef]
- Peng, T.; Nogal, M.; Casas, J.R.; Turmo, J. Role of sensors in error propagation with the dynamic constrained observability method. Sensors 2021, 21, 2918. [Google Scholar] [CrossRef]
- Xia, Y.; Hao, H.; Zanardo, G.; Deeks, A. Long term vibration monitoring of an RC slab: Temperature and humidity effect. Eng. Struct. 2006, 28, 441–452. [Google Scholar] [CrossRef]
- Hajializadeh, D.; Wang, Y.; Kullaa, J. Damage Detection and Localization under Variable Environmental Conditions Using Compressed and Reconstructed Bayesian Virtual Sensor Data. Sensors 2022, 22, 306. [Google Scholar] [CrossRef]
- Farré-Checa, J.; Komarizadehasl, S.; Ma, H.; Lozano-Galant, J.A.; Turmo, J. Direct simulation of the tensioning process of cable-stayed bridge cantilever construction. Autom. Constr. 2022, 137, 104197. [Google Scholar] [CrossRef]
- Nogal, M.; Lozano-Galant, J.A.; Turmo, J.; Castillo, E. Numerical damage identification of structures by observability techniques based on static loading tests. Struct. Infrastruct. Eng. 2016, 12, 1216–1227. [Google Scholar] [CrossRef] [Green Version]
- Laurendeau, D.; Ručevskis, S.; Rogala, T.; Katunin, A. Optimal Sensor Placement for Modal-Based Health Monitoring of a Composite Structure. Sensors 2022, 22, 3867. [Google Scholar] [CrossRef]
- Dumitriu, M. Condition Monitoring of the Dampers in the Railway Vehicle Suspension Based on the Vibrations Response Analysis of the Bogie. Sensors 2022, 22, 3290. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Model Updating of Railway Bridge Using in Situ Dynamic Displacement Measurement under Trainloads. J. Bridge Eng. 2015, 20, 04015019–04015031. [Google Scholar] [CrossRef]
- Guo, T.; Frangopol, D.M.; Chen, Y. Fatigue reliability assessment of steel bridge details integrating weigh-in-motion data and probabilistic finite element analysis. Comput. Struct. 2012, 112–113, 245–257. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Mobaraki, B.; Ma, H.; Lozano-Galant, J.-A.; Turmo, J. Development of a Low-Cost System for the Accurate Measurement of Structural Vibrations. Sensors 2021, 21, 6191. [Google Scholar] [CrossRef]
- Khandpur, R.S. Accelerometer; Wiley: Hoboken, NJ, USA, 2020; ISBN 9781119288121. [Google Scholar]
- Shi, Y.; Zhang, J.; Jiao, J.; Zhao, R.; Cao, H. Calibration Analysis of High-G MEMS Accelerometer Sensor Based on Wavelet and Wavelet Packet Denoising. Sensors 2021, 21, 1231. [Google Scholar] [CrossRef]
- Wojnar, G.; Burdzik, R.; Wieczorek, A.N.; Konieczny, Ł. Multidimensional Data Interpretation of Vibration Signals Registered in Different Locations for System Condition Monitoring of a Three-Stage Gear Transmission Operating under Difficult Conditions. Sensors 2021, 21, 7808. [Google Scholar] [CrossRef] [PubMed]
- Taniwaki, M.; Hanada, T.; Sakurai, N. Device for acoustic measurement of food texture using a piezoelectric sensor. Food Res. Int. 2006, 39, 1099–1105. [Google Scholar] [CrossRef] [Green Version]
- Zhuang, Y.; Chen, W.; Jin, T.; Chen, B.; Zhang, H.; Zhang, W. A review of computer vision-based structural deformation monitoring in field environments. Sensors 2022, 22, 3789. [Google Scholar] [CrossRef] [PubMed]
- Gayakwad, H.; Thiyagarajan, J.S. Structural damage detection through EMI and wave propagation techniques using embedded PZT smart sensing units. Sensors 2022, 22, 2296. [Google Scholar] [CrossRef] [PubMed]
- Civera, M.; Surace, C. Non-destructive techniques for the condition and structural health monitoring of wind turbines: A literature review of the last 20 years. Sensors 2022, 22, 1627. [Google Scholar] [CrossRef]
- Bado, M.F.; Tonelli, D.; Poli, F.; Zonta, D.; Casas, J.R. Digital twin for civil engineering systems: An exploratory review for distributed sensing updating. Sensors 2022, 22, 3168. [Google Scholar] [CrossRef]
- Seo, J.; Hu, J.W.; Lee, J. Summary review of structural health monitoring applications for highway bridges. J. Perform. Constr. Fac. 2016, 30, 04015072. [Google Scholar] [CrossRef]
- Yi, T.H.; Huang, H.B.; Li, H.N. Development of sensor validation methodologies for structural health monitoring: A comprehensive review. Measure 2017, 109, 200–214. [Google Scholar] [CrossRef]
- Lu, J.; Hu, H.; Bai, Y. Generalized radial basis function neural network based on an improved dynamic particle swarm optimization and AdaBoost algorithm. Neurocomputing 2015, 152, 305–315. [Google Scholar] [CrossRef]
- Mohammady, S.; Delavar, M.R.; Pahlavani, P. Urban growth modeling using an artificial neural network a case study of Sanandaj City, Iran. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-2/W3, 203–208. [Google Scholar] [CrossRef] [Green Version]
- Gattulli, V.; Chiaramonte, L. Condition assessment by visual inspection for a bridge management system. Comput.-Aided Civ. Infrastruct. Eng. 2005, 20, 95–107. [Google Scholar] [CrossRef]
- Liu, C.; Gong, Y.; Laflamme, S.; Phares, B.; Sarkar, S. Bridge damage detection using spatiotemporal patterns extracted from dense sensor network. Meas. Sci. Technol. 2016, 28, 014011. [Google Scholar] [CrossRef] [Green Version]
- An, Y.; Chatzi, E.; Sim, S.H.; Laflamme, S.; Blachowski, B.; Ou, J. Recent progress and future trends on damage identification methods for bridge structures. Struct. Control Health Monit. 2019, 26, e2416. [Google Scholar] [CrossRef]
- Brownjohn, J.M. Structural health monitoring of civil infrastructure. Philos. Trans. A Math. Phys. Eng. Sci. 2007, 365, 589–622. [Google Scholar] [CrossRef] [Green Version]
- Sim, S.H. Decentralized Identification and Multimetric Monitoring of Civil Infrastructure Using Smart Sensors; University of Illinois at Urbana-Champaign ProQuest Dissertations Publishing: Ann Arbor, MI, USA, 2011. [Google Scholar]
- Laflamme, S.; Cao, L.; Chatzi, E.; Ubertini, F. Damage detection and localization from dense network of strain sensors. Shock Vib. 2016, 2016, 2562949. [Google Scholar] [CrossRef] [Green Version]
- Downey, A.; Laflamme, S.; Ubertini, F. Reconstruction of in-plane strain maps using hybrid dense sensor network composed of sensing skin. Meas. Sci. Technol. 2016, 27, 124016. [Google Scholar] [CrossRef] [Green Version]
- O’Connor, S.M.; Lynch, J.P.; Gilbert, A.C. Compressed sensing embedded in an operational wireless sensor network to achieve energy efficiency in long-term monitoring applications. Smart Mater. Struct. 2014, 23, 085014. [Google Scholar] [CrossRef]
- Noel, A.B.; Abdaoui, A.; Elfouly, T.; Ahmed, M.H.; Badawy, A.; Shehata, M.S. Structural health monitoring using wireless sensor networks: A comprehensive survey. IEEE Commun. Surv. Tutor. 2017, 19, 1403–1423. [Google Scholar] [CrossRef]
- Chen, Z.; Zhou, X.; Wang, X.; Dong, L.; Qian, Y. Deployment of a smart structural health monitoring system for long-span arch bridges: A review and a case study. Sensors 2017, 17, 2151. [Google Scholar] [CrossRef] [Green Version]
- Vallan, A.; Casalicchio, M.L.; Perrone, G. Displacement and acceleration measurements in vibration tests using a fiber optic sensor. IEEE Trans. Instrum. Meas. 2010, 59, 1389–1396. [Google Scholar] [CrossRef] [Green Version]
- Park, J.W.; Sim, S.H.; Jung, H.J. Wireless displacement sensing system for bridges using multi-sensor fusion. Smart Mater. Struct. 2014, 23, 045022. [Google Scholar] [CrossRef]
- Sung, Y.C.; Lin, T.K.; Chiu, Y.T.; Chang, K.C.; Chen, K.L.; Chang, C.C. A bridge safety monitoring system for prestressed composite box-girder bridges with corrugated steel webs based on in-situ loading experiments and a long-term monitoring database. Eng. Struct. 2016, 126, 571–585. [Google Scholar] [CrossRef]
- Jo, B.W.; Lee, Y.S.; Jo, J.H.; Khan, R.M.A. Computer vision-based bridge displacement measurements using rotation-invariant image processing technique. Sustainability 2018, 10, 1785. [Google Scholar] [CrossRef] [Green Version]
- Park, K.T.; Kim, S.H.; Park, H.S.; Lee, K.W. The determination of bridge displacement using measured acceleration. J. Eng. Struct. 2005, 27, 371–378. [Google Scholar] [CrossRef]
- Psimoulis, P.; Pytharouli, S.; Karambalis, D.; Stiros, S. Potential of Global Positioning System (GPS) to measure frequencies of oscillations of engineering structures. J. Sound Vib. 2008, 318, 606–623. [Google Scholar] [CrossRef]
- Hou, S.; Wu, G. A low-cost IoT-based wireless sensor system for bridge displacement monitoring. Smart Mater. Struct. 2019, 28, 085047. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Part | Product Name/Content | Quantity |
|---|---|---|---|
| 1 | Linear Position Sensor (LVDT) | Miran KTR3-50 | 1 |
| 2 | Control Board | Raspberry Pi Zero 2W | 1 |
| 3 | Power Board | Ada Fruit Power boost 1000c | 1 |
| 4 | ADC Board | Multi-Purpose Board | 1 |
| 5 | ADC | MCP3208 | 1 |
| 6 | ADC Socket | 16 pin DIP | 1 |
| 7 | Wireless LAN | USB LAN | 1 |
| 8 | Switch | toggle Switch | 1 |
| 9 | Display | LED | 1 |
| 10 | Battery | Customized Li-ion 5200 mAh | 1 |
| 11 | Thermo-hygrometer | High precision sensor | 1 |
| Case | Type | Measured Value | |||||
|---|---|---|---|---|---|---|---|
| Displacement | Count | Min | Max | The Mean | Error | ||
| 1 | Lower | 10 mm | 118 | 10.00 | 10.05 | 10.02 | 0.05 |
| Upper | 12 mm | 11.97 | 12.04 | 12.01 | 0.07 | ||
| 2 | Lower | 12 mm | 102 | 11.99 | 12.05 | 12.02 | 0.06 |
| Upper | 14 mm | 13.95 | 14.04 | 14.00 | 0.09 | ||
| 3 | Lower | 14 mm | 103 | 13.99 | 14.05 | 14.02 | 0.06 |
| Upper | 16 mm | 15.98 | 16.03 | 16.01 | 0.05 | ||
| 4 | Lower | 16 mm | 102 | 15.96 | 16.03 | 16.01 | 0.07 |
| Upper | 18 mm | 17.97 | 18.04 | 18.01 | 0.07 | ||
| 5 | Lower | 18 mm | 104 | 17.97 | 18.04 | 18.01 | 0.07 |
| Upper | 20 mm | 19.96 | 20.05 | 20.01 | 0.09 | ||
| 6 | Lower | 20 mm | 103 | 19.99 | 20.05 | 20.02 | 0.06 |
| Upper | 22 mm | 21.97 | 22.06 | 22.01 | 0.09 | ||
| 7 | Lower | 22 mm | 102 | 21.97 | 22.04 | 22.01 | 0.07 |
| Upper | 24 mm | 23.95 | 24.05 | 24.02 | 0.10 | ||
| 8 | Lower | 24 mm | 104 | 23.98 | 24.06 | 24.01 | 0.08 |
| Upper | 26 mm | 25.98 | 26.05 | 26.01 | 0.07 | ||
| 9 | Lower | 26 mm | 101 | 25.98 | 26.06 | 26.02 | 0.08 |
| Upper | 28 mm | 27.98 | 28.05 | 28.02 | 0.07 | ||
| 10 | Lower | 28 mm | 104 | 27.97 | 28.06 | 28.01 | 0.09 |
| Upper | 30 mm | 29.98 | 30.04 | 30.01 | 0.06 | ||
| 11 | Lower | 30 mm | 104 | 29.98 | 30.06 | 30.02 | 0.08 |
| Upper | 32 mm | 31.97 | 32.06 | 32.01 | 0.09 | ||
| 12 | Lower | 32 mm | 103 | 31.97 | 32.07 | 32.01 | 0.10 |
| Upper | 34 mm | 33.98 | 34.05 | 34.01 | 0.07 | ||
| Item | Real Bridge (Standard) | Simulated Bridge | Reduction Ratio | Remark |
|---|---|---|---|---|
| No. of spans | 10 or less | 5 | - | Abutment and span |
| Max. span length | 24 m | 0.8 m | 1:30 | - |
| Total width | 18 m | 0.6 m | 1:30 | - |
| Design load | DB-24 | - | - | Standard truck running |
| Type | Simulated Bridge | Factor | Real Bridge |
|---|---|---|---|
| Faulting | 1 mm | 0.46 | 0.46 mm |
| Gap | 1 mm | 0.46 | 0.46 mm |
| Type | Simulated Bridge | Factor | Real Bridge |
|---|---|---|---|
| Time of displacement by impacts | 1 s | 0.83 | 0.83 s |
| Type | Factor | Value |
|---|---|---|
| Faulting | Fs | 0.46 |
| Gap | Fg | 0.46 |
| Time of displacement by impacts | Ft | 0.83 |
| An amount of displacement | Fw | - |
| Category | Speed | Faulting | Gap |
|---|---|---|---|
| Simulated bus | 2.3 km/h | −3~3 mm (1 mm distance) | 0~4 mm (2 mm distance) |
| 2.5 km/h | −3~3 mm (1 mm distance) | 0~4 mm (2 mm distance) | |
| 2.7 km/h | −3~3 mm (1 mm distance) | 0~4 mm (2 mm distance) | |
| 2.9 km/h | −3~3 mm (1 mm distance) | 0~4 mm (2 mm distance) | |
| 3.1 km/h | −3~3 mm (1 mm distance) | 0~4 mm (2 mm distance) | |
| Simulated truck | 2.3 km/h | −3~3 mm (1 mm distance) | 0~4 mm (2 mm distance) |
| 2.5 km/h | −3~3 mm (1 mm distance) | 0~4 mm (2 mm distance) | |
| 2.7 km/h | −3~3 mm (1 mm distance) | 0~4 mm (2 mm distance) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.-S.; Ham, H.-M.; Ahn, Y.-H. Expansion Joints Risk Prediction System Based on IoT Displacement Device. Electronics 2023, 12, 2713. https://doi.org/10.3390/electronics12122713
Park J-S, Ham H-M, Ahn Y-H. Expansion Joints Risk Prediction System Based on IoT Displacement Device. Electronics. 2023; 12(12):2713. https://doi.org/10.3390/electronics12122713
Chicago/Turabian StylePark, Jong-Su, Hyoung-Min Ham, and Yeong-Hwi Ahn. 2023. "Expansion Joints Risk Prediction System Based on IoT Displacement Device" Electronics 12, no. 12: 2713. https://doi.org/10.3390/electronics12122713