
Multi-Parameter Optimization of Stator Coreless Disc Motor Based on Orthogonal Response Surface Method



Abstract
:1. Introduction
2. Structure and Working Principle of the PCB Stator Coreless Disc Motor
2.1. Integrated Motor System
2.2. Calculation of Main Parameters of the Motor
3. Optimization of Motor Parameters Based on Orthogonal Experiments
4. Response Surface Experimental Design
4.1. Response Surface Algorithm
4.2. Selection of Optimization Objectives and Factors and Experimental Results
5. Comparative Analysis before and after Optimization
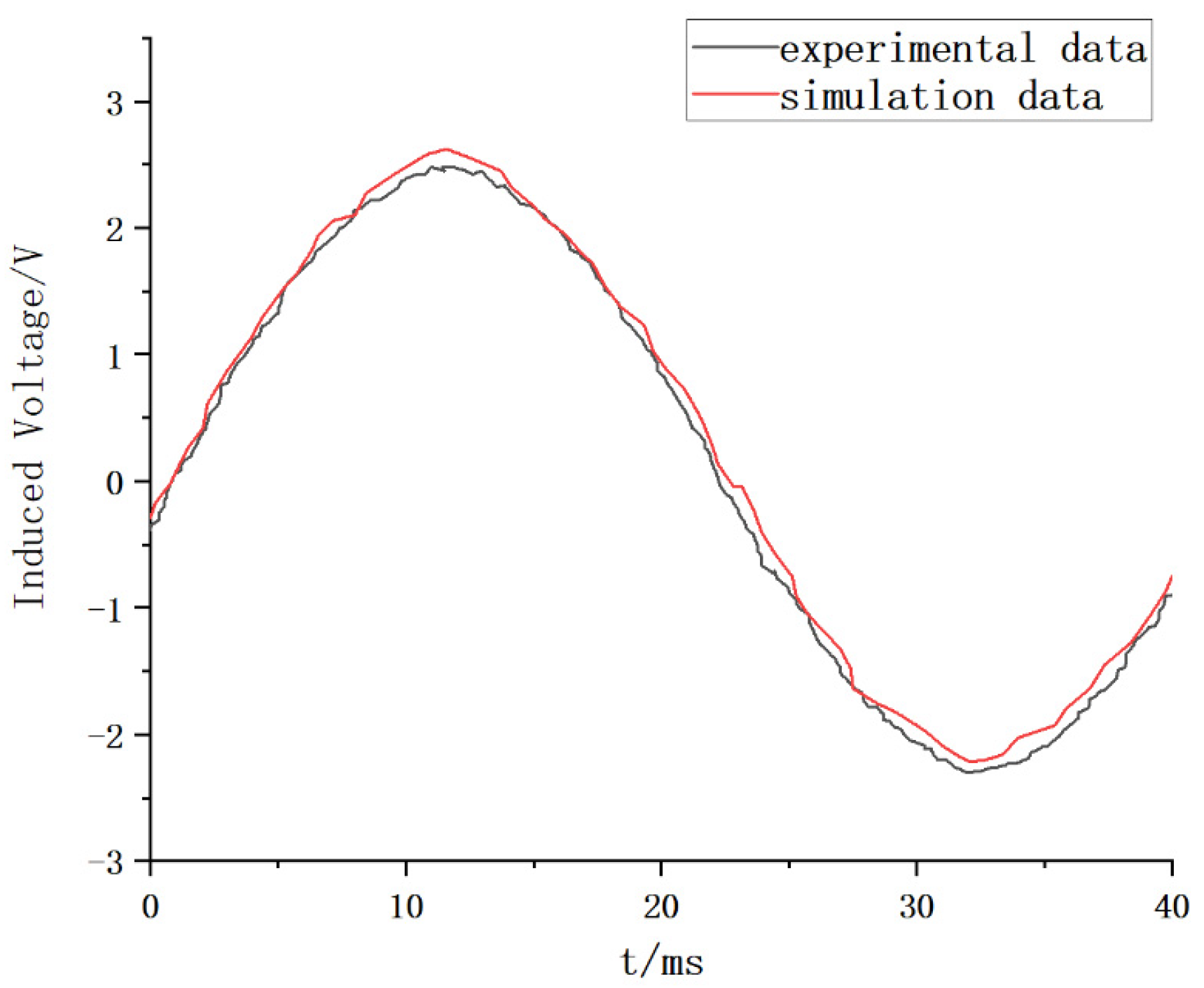
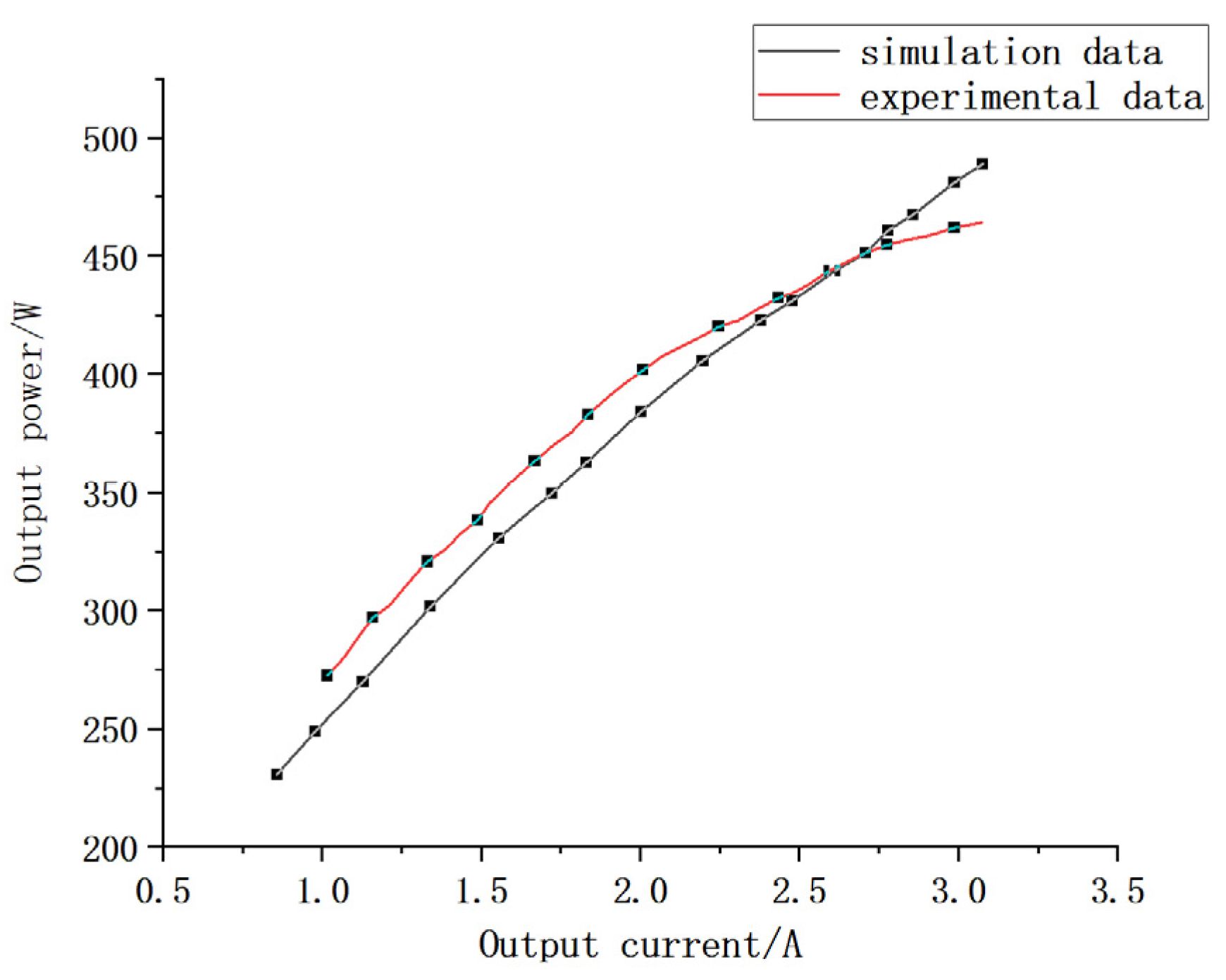
6. Prototype Experiment
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sultan, H.M. Design and Modeling of a Robust Sensorless Control System for a Linear Permanent Magnet Synchronous Motor. Electronics 2021, 10, 966. [Google Scholar] [CrossRef]
- Qiu, R.; Hua, Q.; Zhang, H. Optimization design of permanent magnet synchronous motor rotor based on Taguchi method. J. Qingdao Univ. (Eng. Technol. Ed.) 2020, 35, 57–61. [Google Scholar]
- Wang, X.; Huang, X.; Li, T. Optimization design of PCB stator disc permanent magnet motor winding under high-frequency power supply conditions. J. China Electr. Eng. 2021, 41, 1937–1946. [Google Scholar]
- Lu, Y.; Li, J.; Qu, R.; Ye, D.; Lu, H.; Sun, J.; Ge, M.; Xu, H. Electromagnetic Force and Vibration Analysis of Permanent-Magnet-Assisted Synchronous Reluctance Machines. IEEE Trans. Ind. Appl. 2018, 54, 4246–4256. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, Y.; Zhou, G. Research on a Novel Transverse Flux Permanent Magnet Motor with Hybrid Stator Core and Disk-Type Rotor for Industrial Robot Applications. IEEE Trans. Ind. Electron. 2021, 68, 11223–11233. [Google Scholar] [CrossRef]
- Zhang, C.; Chen, Z.; Mei, Q.; Duan, J. Application of Particle Swarm Optimization Combined with Response Surface Methodology to Transverse Flux Permanent Magnet Motor Optimization. IEEE Trans. Magn. 2017, 53, 1–7. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Robust Predictive Control Scheme for Permanent-Magnet Synchronous Generators Based Modern Wind Turbines. Electronics 2021, 10, 1596. [Google Scholar] [CrossRef]
- Tang, R. Theory and Design of Modern Permanent Magnet Motors; Mechanical Industry Press: Beijing, China, 2016. [Google Scholar]
- Ebrahimi, M.; Javadi, H.; Daghigh, A. Maximum power point tracking of a variable speed wind turbine with a coreless AFPM synchronous generator using oTc method. In Proceedings of the 2017 8th Power Electronics, Drive Systems & Technologies Conference (PEDSTC), Mashhad, Iran, 14–16 February 2017; pp. 507–512. [Google Scholar]
- Wang, X.; Lou, F.; Li, C. PCB disc type permanent magnet synchronous motor spiral winding optimization. Chin. J. Electr. Eng. 2017, 37, 6092–6100. [Google Scholar]
- Wang, X.; Li, H.; Pang, W.; Li, C.-P. Comparative analysis of distributed windings for PCB statorless disc motors. J. Electr. Mach. Control 2018, 22, 11. [Google Scholar]
- Ma, Y.; Ching, T.W.; Fu, W.N.; Niu, S. Multi-Objective Optimization of a Direct-Drive Dual-Structure Permanent Magnet Machine. Magn. IEEE Trans. 2019, 55, 1–4. [Google Scholar] [CrossRef]
- Silva, A.M.; Antunes, C.H.; Mendes, A.M.; Ferreira, F.J. On Phase Shifting and Diversified Coil-Pitch for Enhanced Multiobjective Winding Design Optimization. IEEE Trans. Energy Convers. 2020, 36, 2002–2011. [Google Scholar] [CrossRef]
- Farhan, A.; Johnson, M.; Hanson, K.; Severson, E.L. Design of an ultra-high speed bearingless motor for significant rated power. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Detroit, MI, USA, 11–15 October 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Liu, F.; Wang, P.; Lei, Y. Structural Optimization of Permanent Magnet Vernier Motors Based on Taguchi Method. Exp. Technol. Manag. 2020, 37, 96–100. [Google Scholar]
- Zhou, X.; Zhu, X.; Wu, W.; Xiang, Z.; Liu, Y.; Quan, L. Multi-objective optimization design of variable-saliency-ratio PM motor considering driving cycles. IEEE Trans. Ind. Electron. 2020, 68, 6516–6526. [Google Scholar] [CrossRef]
- Du, X.; Deng, J. Optimization of Air Gap Magnetic Density Waveform of Permanent Magnet Synchronous Motor Based on GPR-PSO Model. Explos. Proof Mot. 2017, 52, 20. [Google Scholar]
- Cao, Y.; Huang, Y.; Jin, L.; Hu, M. Design and analysis of axial magnetic field coreless permanent magnet motors with magnetic pole combination. Chin. J. Electr. Eng. 2014, 34, 903–909. [Google Scholar]
- Gao, F.Y.; Qi, X.D.; Li, X.F.; Tao, C.X.; Gao, P. Analytical calculation and optimization analysis of electromagnetic performance of unequal-width unequal-thickness Halbach partially segmented permanent magnet synchronous motor. J. Electrotechnol. 2022, 37, 1398–1414. [Google Scholar]
- Wang, X. Design and Analysis of a New Type of Coreless Armature Disc Motor; China Shipbuilding Research Institute: Beijing, China, 2012. [Google Scholar]
- Liu, R.; Liu, J.; Zhang, J.; Sun, G. Analytical model of eccentric air gap magnetic field of rotor of Halbach array list-pasted permanent magnet motor based on hyperbolic cotangent transform. J. Electrotechnol. 2023, 38, 1433–1446. [Google Scholar]
- Du, X.; Huang, K.; Tan, G.; Huang, X. Multi-objective optimization of permanent magnet motor torque based on response surface method. Micro Spec. Mot. 2019, 47, 20–23. [Google Scholar]
- Yang, X.; Ren, Z.; Guo, B.; Ding, Y. Probabilistic optimal energy flow calculation method for electricity-gas interconnection system based on stochastic response surface. New Technol. Electr. Energy 2021, 40, 1–9. [Google Scholar]
- Liu, G.; Wang, Y.; Chen, Q.; Xu, G.; Song, C. Multi-Objective Deterministic and Robust Optimization Design of a new Spoke-Type Permanent Magnet Machine for the Improvement of Torque Performance. IEEE Trans. Ind. Electron. 2020, 67, 10202–10212. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value |
|---|---|
| Rated power, w | 500 |
| Rated speed, r/min | 750 |
| Outer diameter of stator, mm | 100 |
| Stator bore, mm | 70 |
| Number of PCB coils per layer | 3 |
| Coil conductor thickness, mm | 0.105 |
| Width of coil conductor, mm | 0.70 |
| Insulation distance between conductors, mm | 0.20 |
| Number of coil conductor layers | 12 |
| PCB Number of sections | 1 |
| Initial Design Factor | Horizontal | Numerical Value |
|---|---|---|
| Number of rotor poles p | 1 | 2 |
| 2 | 4 | |
| 3 | 6 | |
| 4 | 8 | |
| Main/auxiliary magnetic pole size ratio Rnd | 1 | 0.5 |
| 2 | 1 | |
| 3 | 2 | |
| 4 | 3 | |
| Permanent magnet thickness Tm, mm | 1 | 3 |
| 2 | 4 | |
| 3 | 5 | |
| 4 | 6 | |
| Air gap length δ, mm | 1 | 0.5 |
| 2 | 0.8 | |
| 3 | 1 | |
| 4 | 1.2 |
| Divisor | Horizontal | Td, mN·m | Bδ, T | THD, % |
|---|---|---|---|---|
| A | 1 | 93.3 | 0.43 | 38.0 |
| 2 | 42.8 | 0.56 | 42.4 | |
| 3 | 74.4 | 0.60 | 35.6 | |
| 4 | 81.7 | 0.66 | 28.2 | |
| B | 1 | 48.1 | 0.56 | 54.5 |
| 2 | 77.9 | 0.58 | 42.2 | |
| 3 | 111.7 | 0.57 | 25.3 | |
| 4 | 54.3 | 0.54 | 22.1 | |
| C | 1 | 100.0 | 0.53 | 26.5 |
| 2 | 65.2 | 0.53 | 39.2 | |
| 3 | 92.1 | 0.60 | 39.9 | |
| 4 | 34.8 | 0.61 | 38.6 | |
| D | 1 | 58.4 | 0.61 | 60.3 |
| 2 | 80.7 | 0.55 | 39.5 | |
| 3 | 90.0 | 0.52 | 36.8 | |
| 4 | 63.0 | 0.58 | 38.3 |
| Order Number | Plate Thickness, mm | Aperture, mm | Unequal Width, mm | A | B | C | Eddy Current Loss, W | Average Temperature, °C | Torque, mN·m |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 1.4 | 0.15 | 0.15 | −1 | −1 | 0 | 0.436 | 127.1 | 161 |
| 2 | 1.8 | 0.15 | 0.15 | 1 | −1 | 0 | 0.428 | 130.0 | 112 |
| 3 | 1.4 | 0.25 | 0.15 | −1 | 1 | 0 | 0.432 | 129.7 | 164 |
| 4 | 1.8 | 0.25 | 0.15 | 1 | 1 | 0 | 0.423 | 107.4 | 117 |
| 5 | 1.4 | 0.20 | 0.10 | −1 | 0 | −1 | 0.425 | 158.4 | 192 |
| 6 | 1.8 | 0.20 | 0.10 | 1 | 0 | −1 | 0.415 | 134.4 | 136 |
| 7 | 1.4 | 0.20 | 0.20 | −1 | 0 | 1 | 0.443 | 118.6 | 177 |
| 8 | 1.8 | 0.20 | 0.20 | 1 | 0 | 1 | 0.434 | 106.3 | 129 |
| 9 | 1.6 | 0.15 | 0.10 | 0 | −1 | −1 | 0.424 | 140.4 | 181 |
| 10 | 1.6 | 0.25 | 0.10 | 0 | 1 | −1 | 0.418 | 136.8 | 184 |
| 11 | 1.6 | 0.15 | 0.20 | 0 | −1 | 1 | 0.432 | 119.2 | 176 |
| 12 | 1.6 | 0.25 | 0.20 | 0 | 1 | 1 | 0.430 | 97.2 | 179 |
| 13 | 1.4 | 0.15 | 0.10 | −1 | −1 | −1 | 0.429 | 162.7 | 182 |
| 14 | 1.6 | 0.20 | 0.15 | 0 | 0 | 0 | 0.434 | 130.9 | 160 |
| 15 | 1.8 | 0.25 | 0.20 | 1 | 1 | 1 | 0.433 | 102.4 | 131 |
| Motor Parameters | Before Optimization | After Optimization |
|---|---|---|
| Number of rotor poles | 4 | 8 |
| Primary/auxiliary pole size ratio | 1 | 2 |
| Thickness of permanent magnets | 5 mm | 3 mm |
| Air gap length | 0.8 mm | 1 mm |
| Plate thickness | 1.4 mm | 1.62 mm |
| Aperture | 0.1 mm | 0.25 mm |
| Unequal width | 0.2 mm | 0.1 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Li, Y.; Zhang, L.; Xue, Z.; Hu, W.; Li, G.; Guo, Y. Multi-Parameter Optimization of Stator Coreless Disc Motor Based on Orthogonal Response Surface Method. Electronics 2023, 12, 3020. https://doi.org/10.3390/electronics12143020
Sun H, Li Y, Zhang L, Xue Z, Hu W, Li G, Guo Y. Multi-Parameter Optimization of Stator Coreless Disc Motor Based on Orthogonal Response Surface Method. Electronics. 2023; 12(14):3020. https://doi.org/10.3390/electronics12143020
Chicago/Turabian StyleSun, Huiqin, Ying Li, Lucheng Zhang, Zezhao Xue, Weiguang Hu, Guoshuai Li, and Yingjun Guo. 2023. "Multi-Parameter Optimization of Stator Coreless Disc Motor Based on Orthogonal Response Surface Method" Electronics 12, no. 14: 3020. https://doi.org/10.3390/electronics12143020
APA StyleSun, H., Li, Y., Zhang, L., Xue, Z., Hu, W., Li, G., & Guo, Y. (2023). Multi-Parameter Optimization of Stator Coreless Disc Motor Based on Orthogonal Response Surface Method. Electronics, 12(14), 3020. https://doi.org/10.3390/electronics12143020