
Underwater Image Color Constancy Calculation with Optimized Deep Extreme Learning Machine Based on Improved Arithmetic Optimization Algorithm


Abstract
:1. Introduction
- (1)
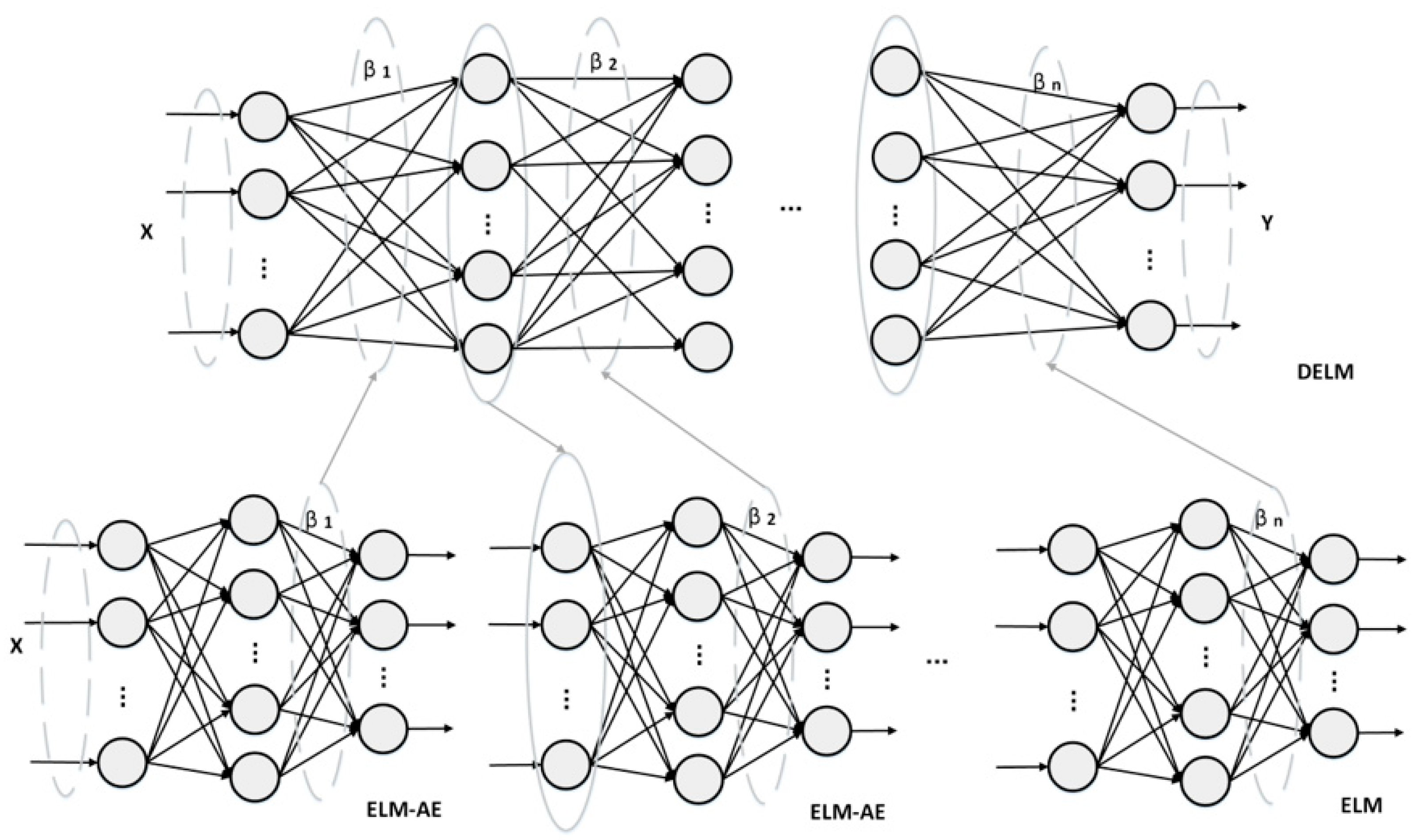
- Constructing the basic model of DELM to compute scene illumination information from the color features of underwater images.
- (2)
- To address the stability and generalization issues caused by the initial parameters in the orthogonal matrix, AOA is employed to optimize the input layer weights and thresholds of ELM-AE in the DELM structure. The search and development stages of AOA are combined with the nonlinear feature mapping stage of ELM-AE.
- (3)
- AOA is applied to select the hidden layer nodes’ number and adaptively search for the optimization of effective activation nodes. It simultaneously optimizes hidden layer biases, input weights, and hidden layer nodes’ numbers, obtaining an underwater image illumination estimation model with good predictive performance and stability.
- (4)
- The overall initial search agents of AOA are generated using iterative chaos mapping to improve the initialization strategy of AOA and obtain IAOA. In the initialization strategy, without prior knowledge, IAOA enhances the initial population’s quality, thereby improving the algorithm’s operation speed and accuracy.
2. Theoretical Basis
2.1. Arithmetic Optimization Algorithm
2.2. Deep Extreme Learning Machine
3. Our Contribution
3.1. Search Agent Strategy of DELM Based on AOA
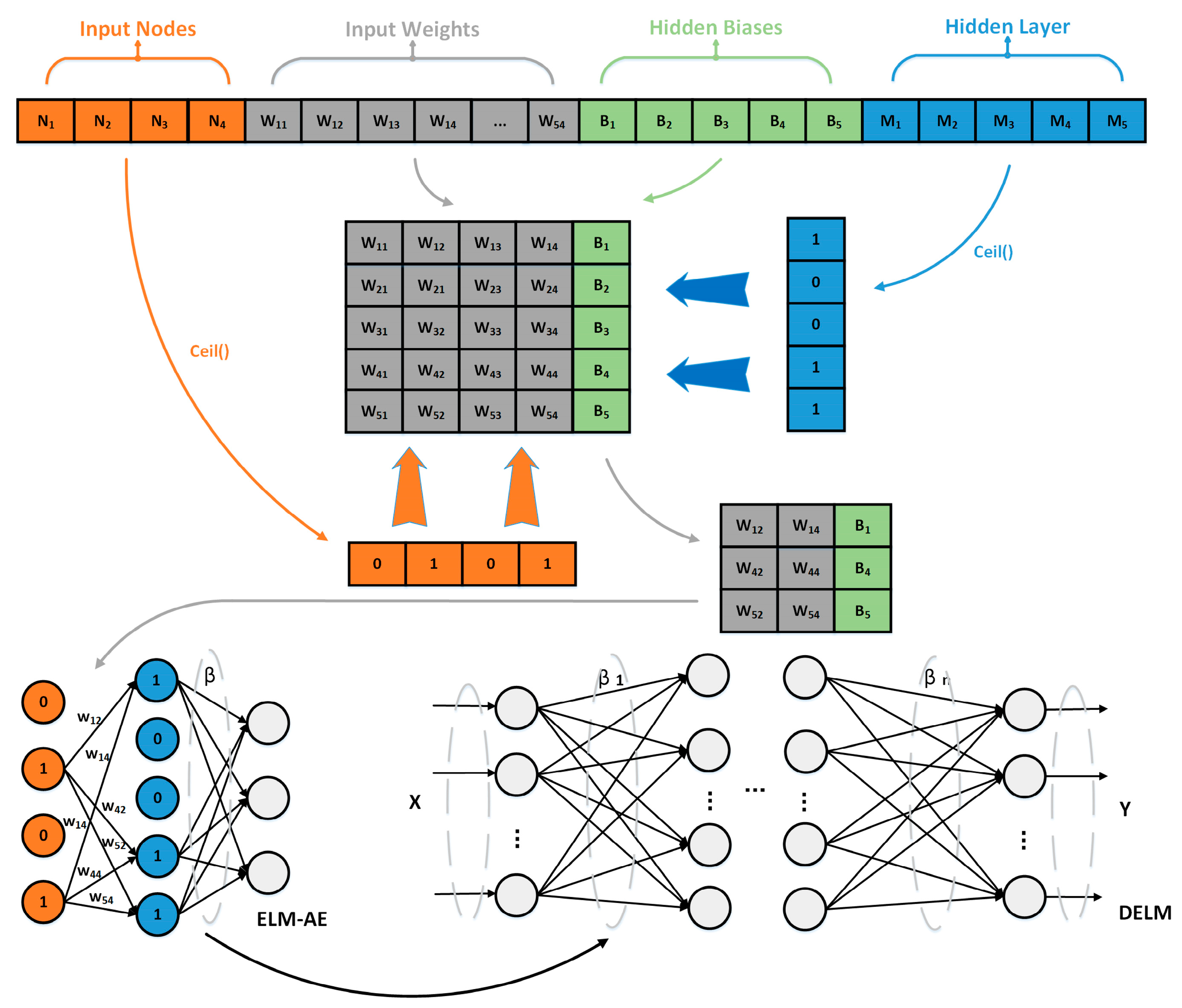
- To determine the maximum network structure, the number of hidden layers and the upper limit of the number of hidden layer nodes were set for DELM;
- The relevant parameters of AOA were initialized, and the n input nodes’ number and the s hidden layer nodes’ number were input into AOA as independent parameters for optimization;
- The fitness value of each individual was calculated to obtain the optimal parameter combination based on the search agent structure, and the node parameter results of the input and output layers were collected;
- According to the Ceil function, map the result to 0 or 1 (0 means freezing the node, 1 means activating the node), and calculate the number of optimal hidden layer nodes.
3.2. Improved Arithmetic Optimization Algorithm Based on Iterative Chaotic Initialization (IAOA)
3.3. Color Constancy Algorithm Flow of Underwater Image Based on IAOA-DELM
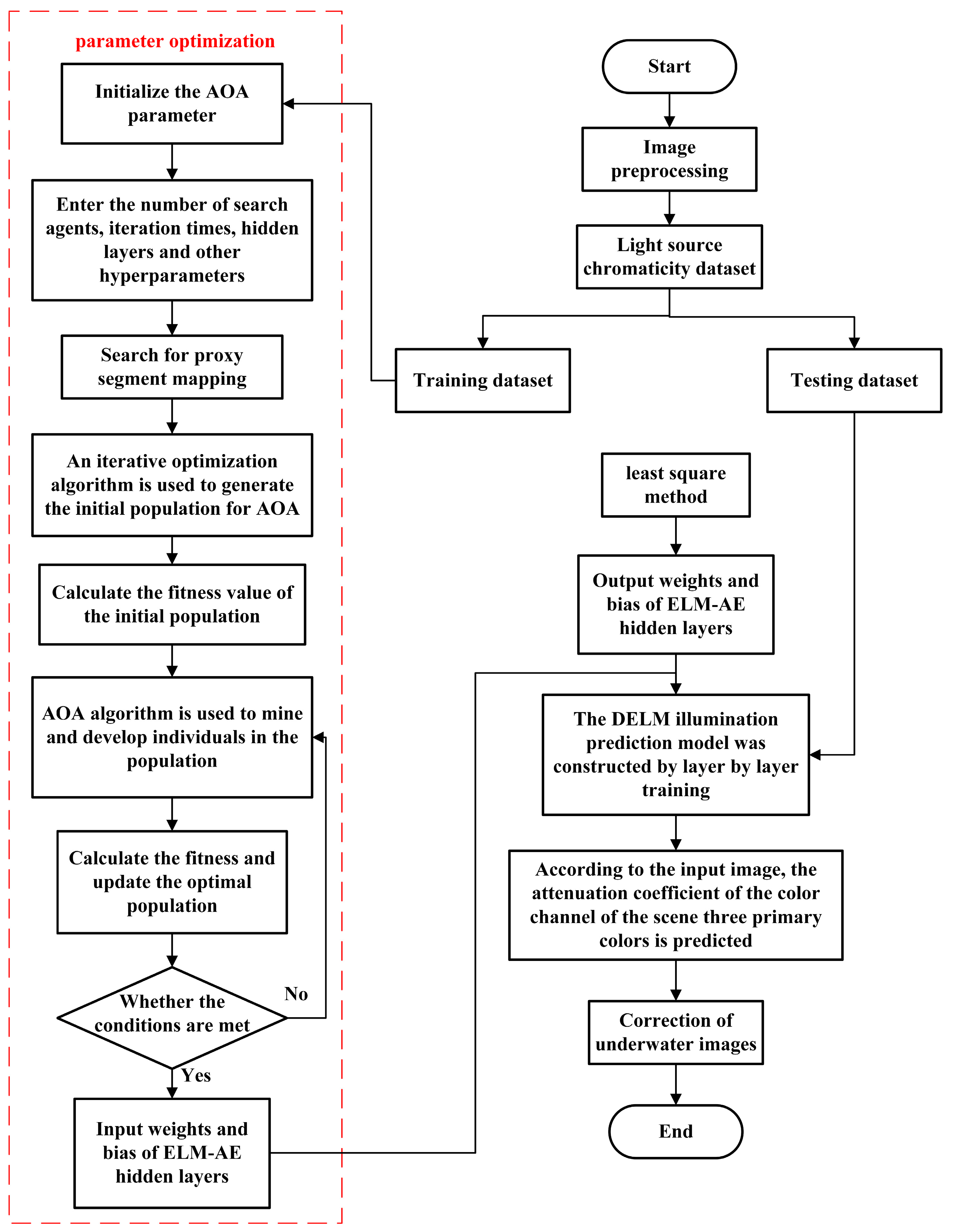
- Underwater scene images were shot, and a gray edge frame was used to extract color features from the images as an input vector and constitute the input data set;
- The number of DELM hidden layers, the number of iterations, and the number of search agents were input. A group of excellent initial populations for AOA was generated by using the iterative chaos algorithm;
- The dataset was randomly divided into training and test sets using ten-fold cross-validation, where nine subsets were used for training and one subset was used for testing;
- The training data set was input, the chromaticity feature vector was normalized, and the parameters were limited to search the effective interval. The training set was used as input for training, and the effective nodes of DELM were activated. The enhanced AOA algorithm was employed to optimize the input layer weights, hidden layer biases, and hidden layer nodes of DELM;
- The fitness of the AOA search agent population was calculated and compared with the best fitness in the previous iteration to decide whether to update the population position;
- The optimal parameters of IAOA-DELM were obtained after reaching the maximum number of iterations, and the input weight matrix β of ELM-AE was calculated. The output weight matrix of DELM was obtained, and the IAOA-DELM illumination estimation model was constructed;
- The IAOA-DELM illumination estimation model was used to calculate the illumination of the test set images. The color constancy of underwater images is realized by restoring the image to the standard light source based on the diagonal mapping matrix.
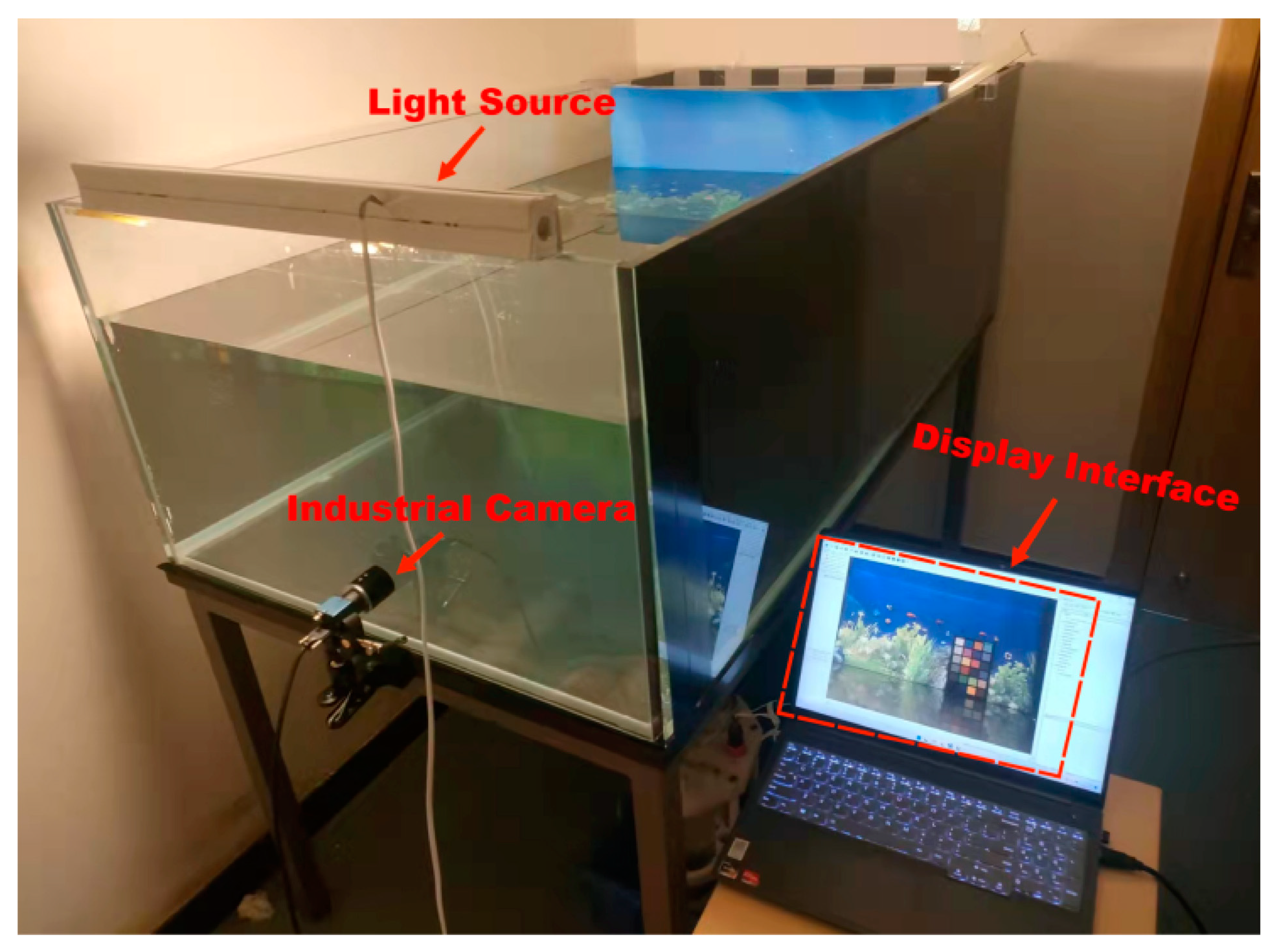
3.4. Experimental Scene Construction
3.5. Data Set Acquisition
3.6. Evaluation Index
4. Experimental Results and Analysis
4.1. Experimental Parameter Setting
4.1.1. DELM Set Network Parameters
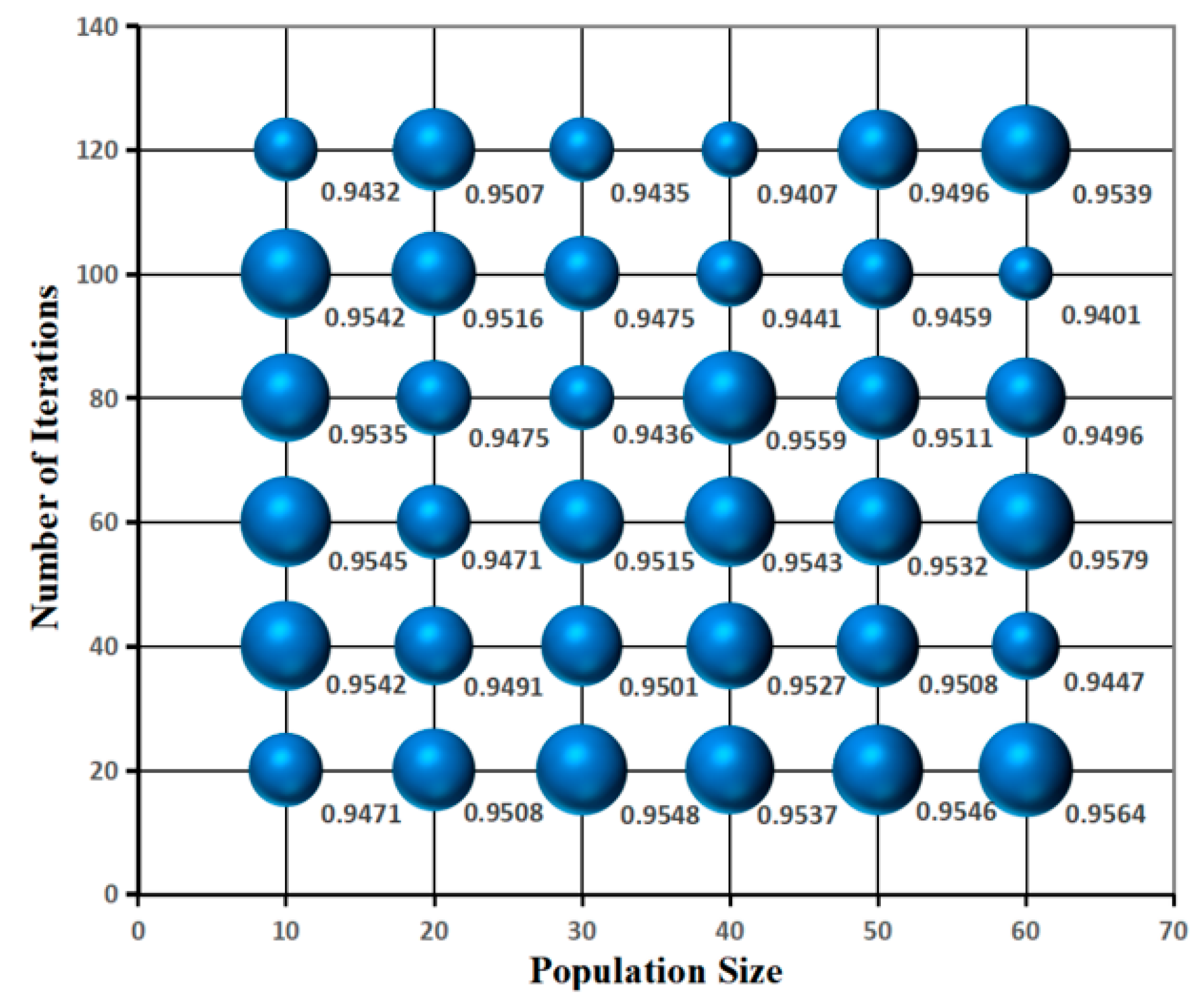
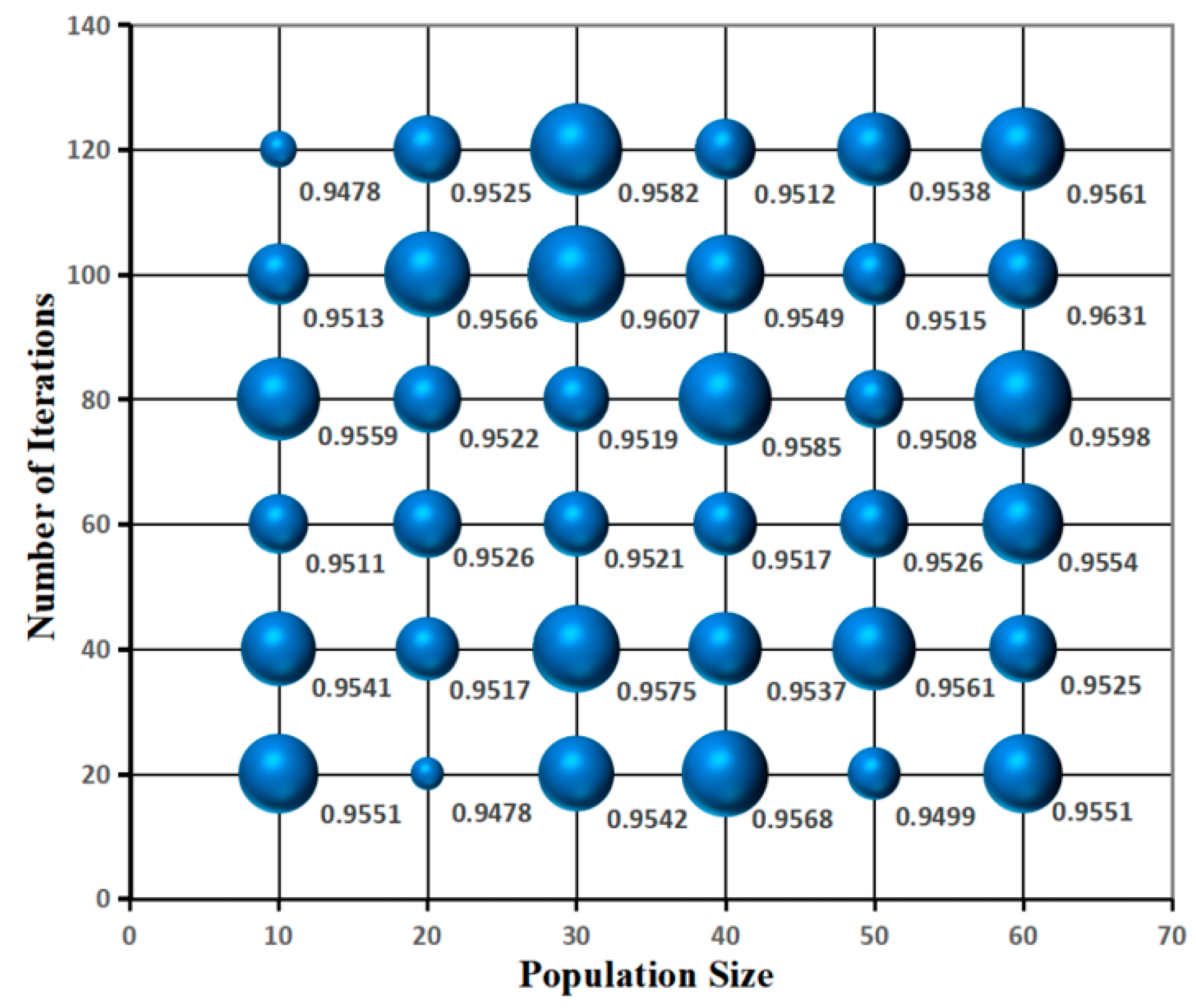
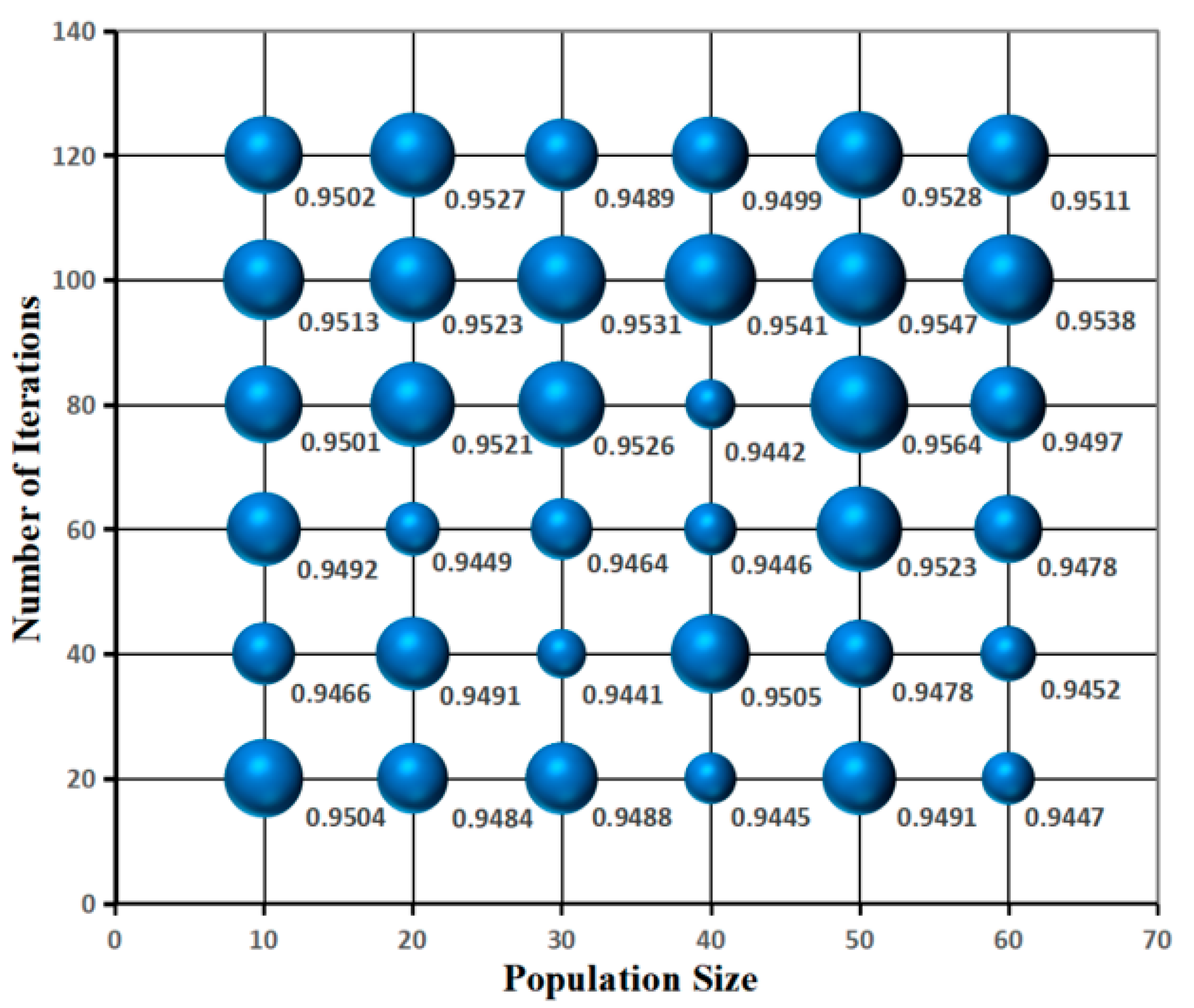
4.1.2. Parameter Selection of IAOA
4.2. Compare the Experimental Results of the Group
4.2.1. Comparison Group Algorithm Parameter Selection
4.2.2. Comparison of Chroma Estimates
4.2.3. Stability Analysis
4.2.4. Comparison of Image Correction Effect
5. Conclusions
- (1)
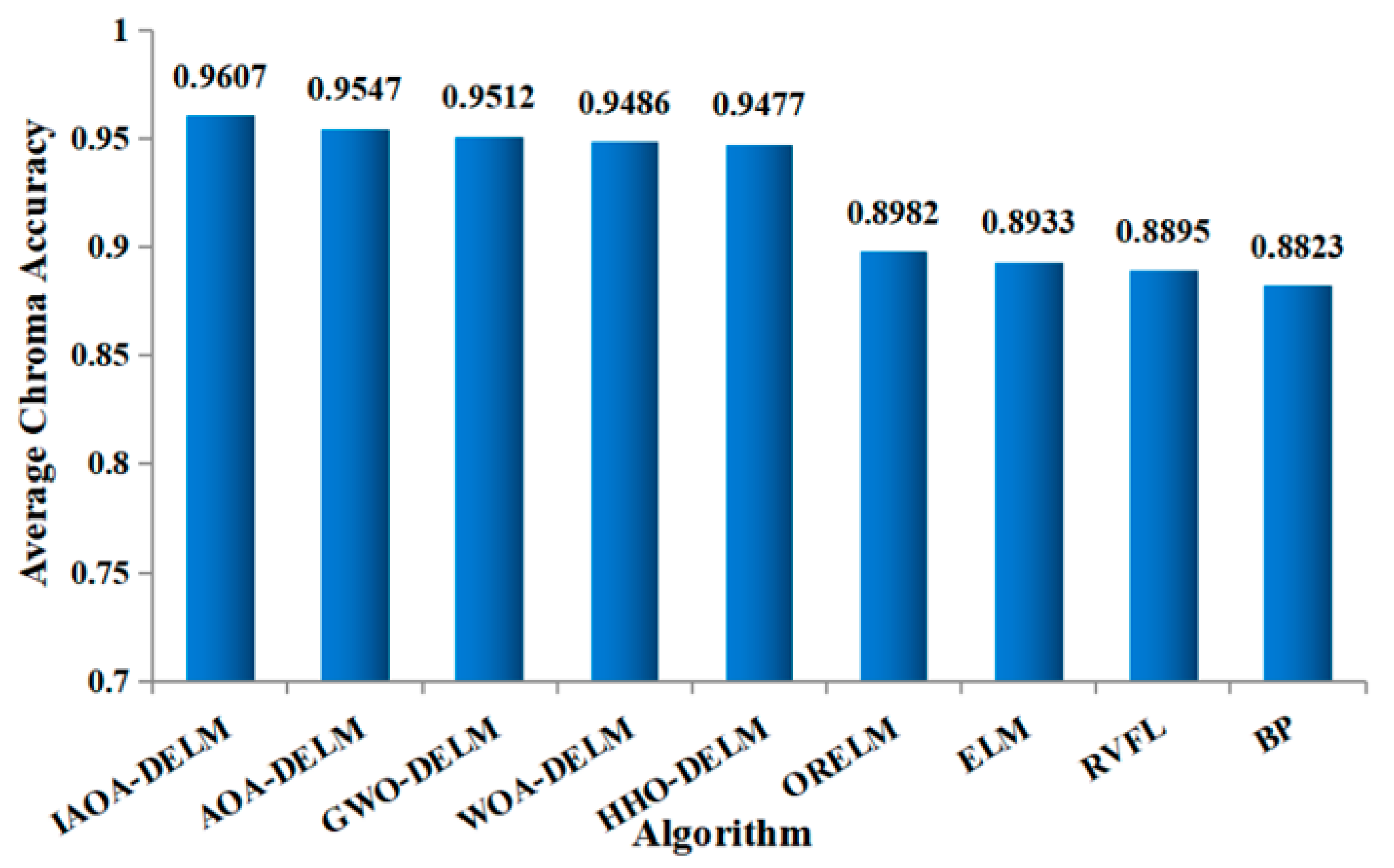
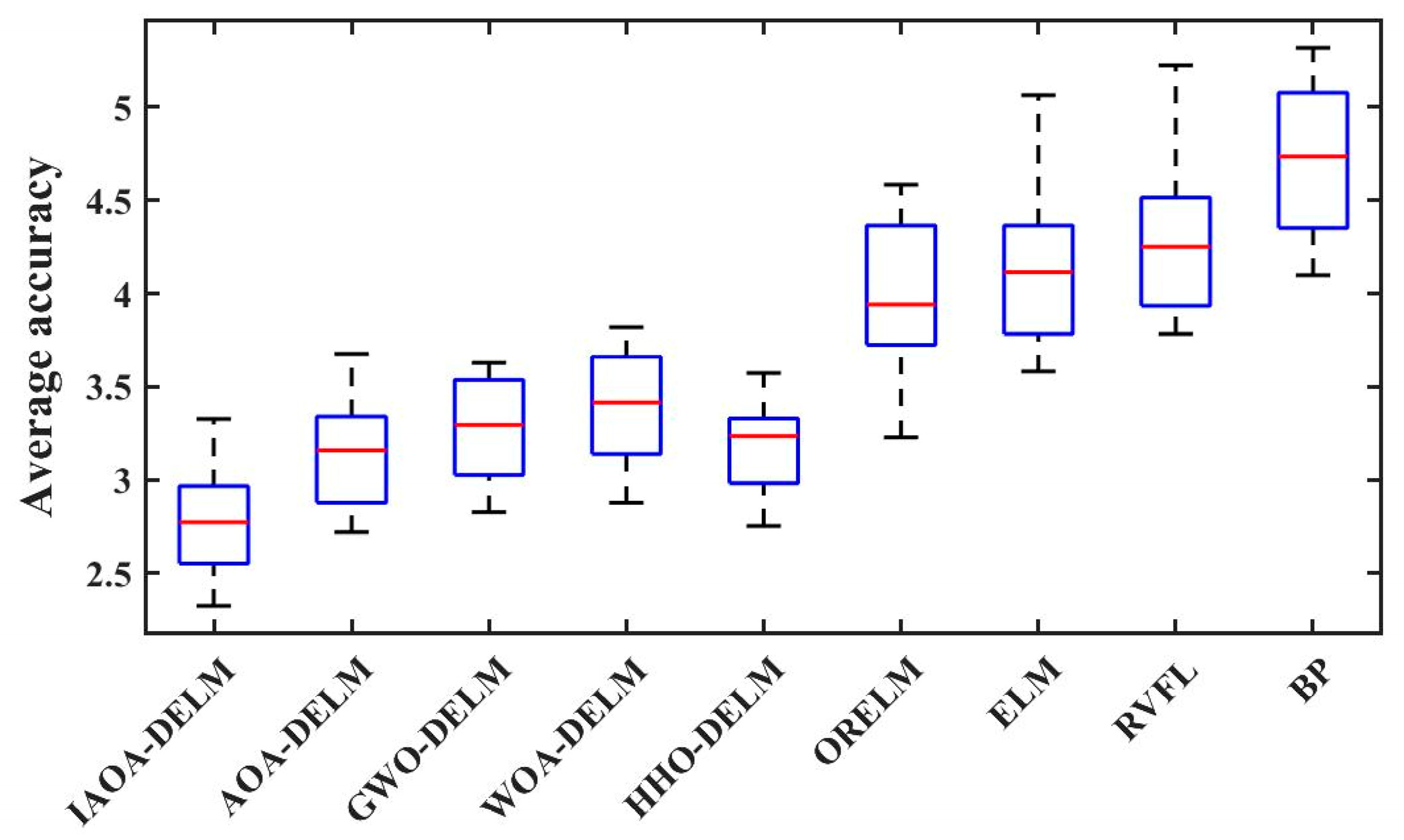
- By optimizing the initial search agents of the AOA algorithm using the iterative chaotic map, this study achieves a more uniform initialization of the population. Comparing the results of computational accuracy in terms of time cost (shown in Table 5) and average accuracy (depicted in Figure 9), it is evident that this method significantly improves the accuracy of color constancy computation at a minimal time cost;
- (2)
- By mapping the search agent fragments, the improved AOA algorithm optimizes the input weights and hidden biases of DELM. The stability analysis boxplot of algorithmic angular error, as presented in Figure 10, demonstrates that the improved AOA-DELM model exhibits a smaller angular error and good stability in color constancy;
- (3)
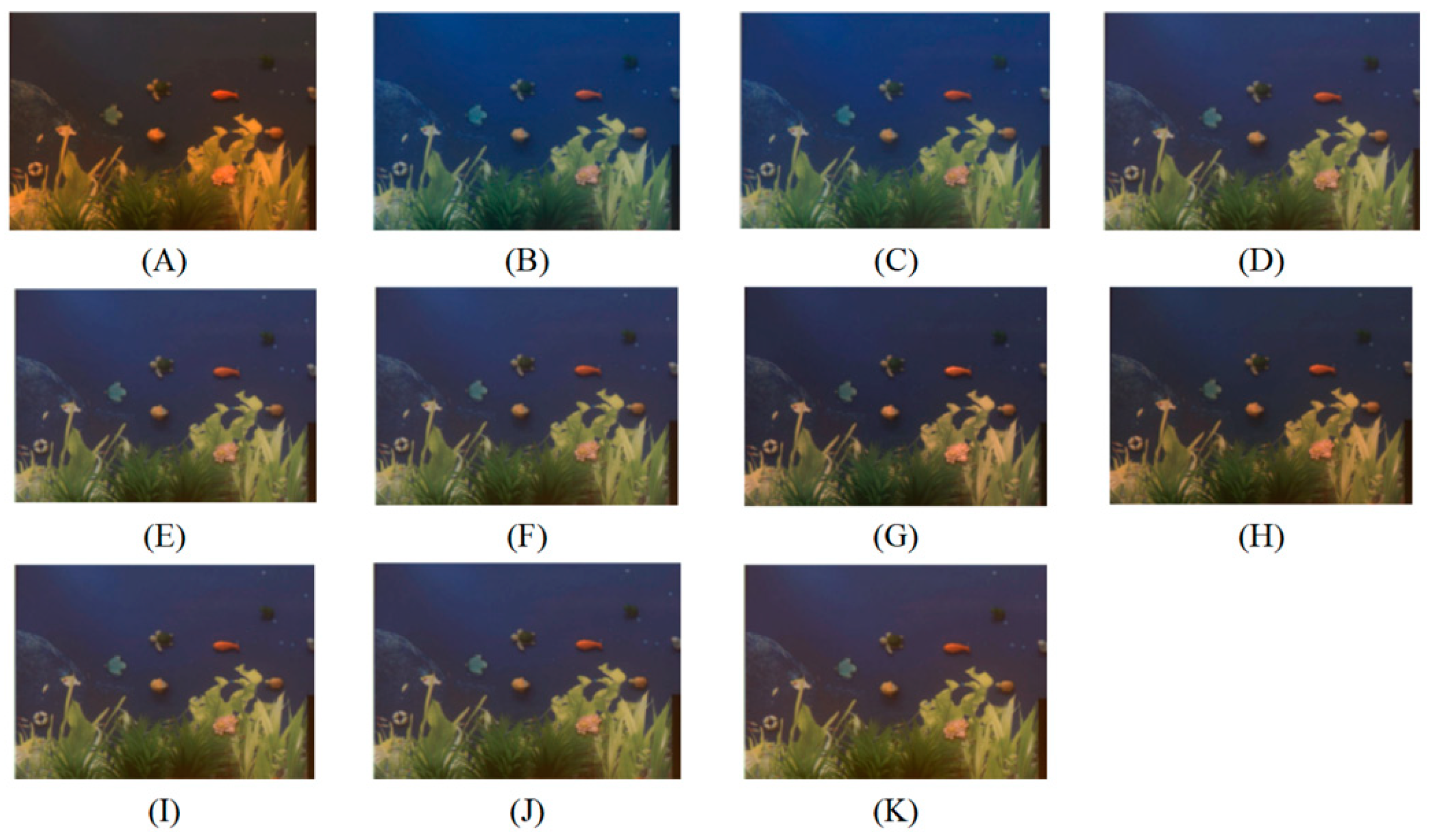
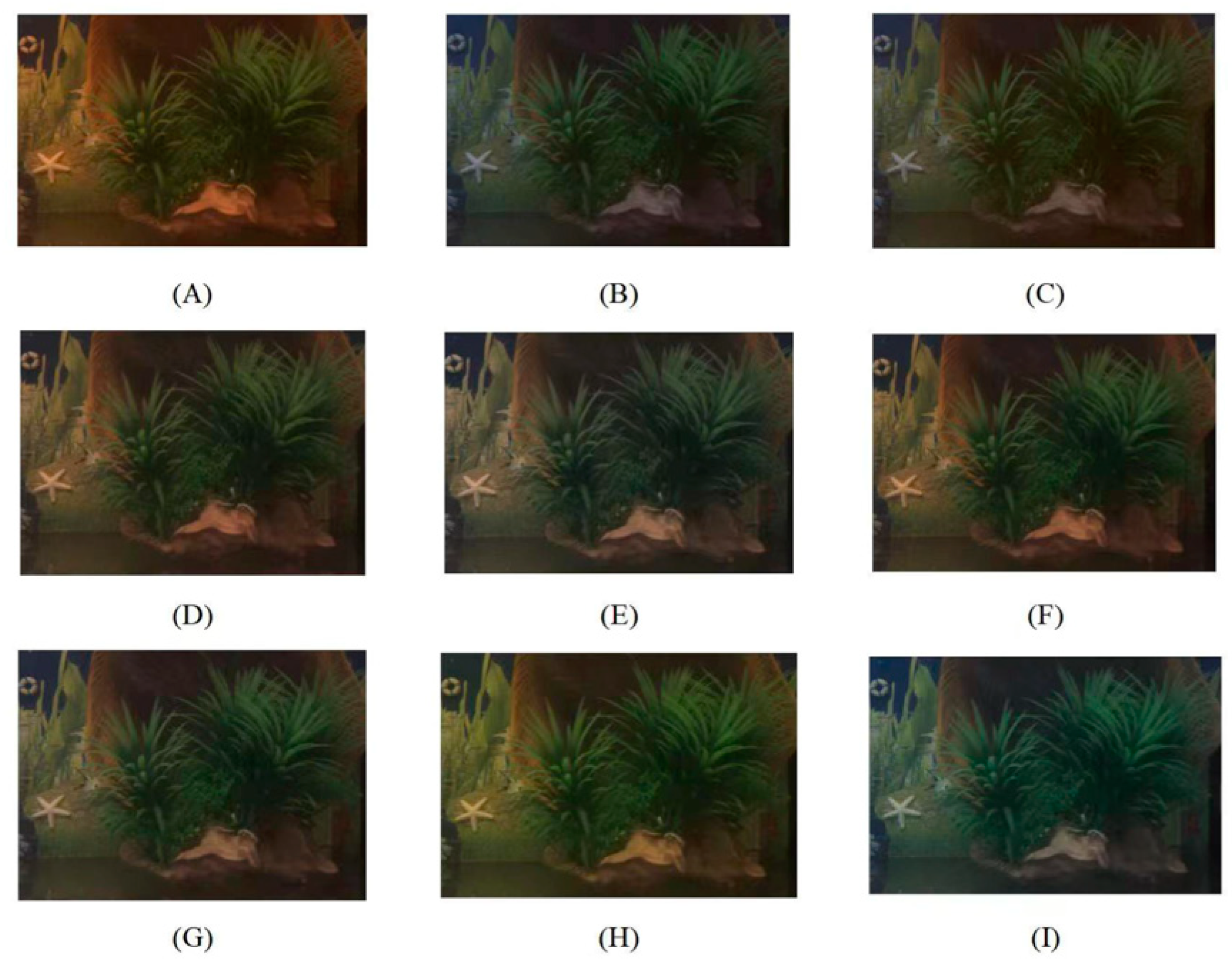
- Comparison of the correction results with selected classical color constancy algorithms and advanced color constancy algorithms, as illustrated in Figure 12, verifies that the underwater image corrected by the improved AOA-DELM model achieves the best visual effect, resembling images with no color error in the air.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Teague, J.; Willans, J.; Megson-Smith, D.A.; Day, J.C.; Allen, M.J.; Scott, T.B. Using Colour as a Marker for Coral ‘Health’: A Study on Hyperspectral Reflectance and Fluorescence Imaging of Thermally Induced Coral Bleaching. Oceans 2022, 3, 547–556. [Google Scholar] [CrossRef]
- Liu, B.; Liu, Z.; Men, S.; Li, Y.; Ding, Z.; He, J.; Zhao, Z. Underwater hyperspectral imaging technology and its applications for detecting and mapping the seafloor: A review. Sensors 2020, 20, 4962. [Google Scholar] [CrossRef] [PubMed]
- Hu, H.; Huang, Y.; Li, X. UCRNet: Underwater color image restoration via a polarization-guided convolutional neural network. Front. Mar. Sci. 2022, 9, 1031549. [Google Scholar] [CrossRef]
- Berman, D.; Treibitz, T.; Avidan, S. Diving into haze-lines: Color restoration of underwater images. In Proceedings of the British Machine Vision Conference (BMVC), London, UK, 4–7 September 2017; Volume 1, p. 2. [Google Scholar]
- Land, E.H. The retinex theory of color vision. Sci. Am. 1977, 237, 108–129. [Google Scholar] [CrossRef]
- Banić, N.; Lončarić, S. Improving the white patch method by subsampling. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; pp. 605–609. [Google Scholar]
- Buchsbaum, G. A spatial processor model for object colour perception. J. Frankl. Inst. 1980, 310, 1–26. [Google Scholar] [CrossRef]
- Xu, L.L.; Jia, B.X. Automatic white balance based on gray world method and retinex. Appl. Mech. Mater. 2014, 462, 837–840. [Google Scholar] [CrossRef]
- Li, Q.Z.; Li, C.S.; Wang, Z.Q. Restoration algorithm for degraded underwater image based on wavelet transform. Comput. Eng. 2011, 37, 202–203. [Google Scholar]
- Yan, M.; Hu, Y.; Zhang, H. Color Constancy Based on Local Reflectance Differences. Electronics 2023, 12, 1396. [Google Scholar] [CrossRef]
- Iqbal, M.; Riaz, M.M.; Ali, S.S. Underwater image enhancement using laplae decomposition. IEEE Geosci. Remote Sens. Lett. 2020, 99, 1–5. [Google Scholar]
- Hassan, N.; Ullah, S.; Bhatti, N. The Retinex based improved underwater image enhancement. Multimed. Tools Appl. 2021, 80, 1839–1857. [Google Scholar] [CrossRef]
- Brainard, D.H.; Freeman, W.T. Bayesian color constancy. J. Opt. Soc. Am. A 1997, 14, 1393–1411. [Google Scholar] [CrossRef]
- Cardei, V.C.; Funt, B.; Barnard, K. Estimating the scene illumination chromaticity by using a neural network. J. Opt. Soc. Am. A 2002, 19, 2374–2386. [Google Scholar] [CrossRef] [Green Version]
- Xiong, W.; Funt, B. Estimating illumination chromaticity via support vector regression. J. Imaging Sci. Technol. 2006, 50, 341–348. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Xiong, W.; Xu, D. A supervised combination strategy for illumination chromaticity estimation. ACM Trans. Appl. Percept. (TAP) 2010, 8, 1–17. [Google Scholar] [CrossRef]
- Lou, Z.; Gevers, T.; Hu, N. Color Constancy by Deep Learning. In Proceedings of the British Machine Vision Conference (BMVC), Swansea, UK, 7–10 September 2015; pp. 71–76. [Google Scholar]
- Bianco, S.; Cusano, C.; Schettini, R. Color constancy using CNNs. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Boston, MA, USA, 8–10 June 2015; pp. 81–89. [Google Scholar]
- Bianco, S.; Cusano, C.; Schettini, R. Single and multiple illuminant estimation using convolutional neural networks. IEEE Trans. Image Process. 2017, 26, 4347–4362. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Kang, X.; Li, C. Transfer learning for color constancy via statistic perspective. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtual, 22 February–1 March 2022; Volume 36, pp. 2361–2369. [Google Scholar]
- Barron, J.T.; Tsai, Y.T. Fast fourier color constancy. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 886–894. [Google Scholar]
- Lo, Y.C.; Chang, C.C.; Chiu, H.C. Clcc: Contrastive learning for color constancy. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 8053–8063. [Google Scholar]
- Deng, C.W.; Huang, G.B.; Xu, J. Extreme learning machines: New trends and applications. Sci. China Inf. Sci. 2015, 2, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Jiang, S.; Liu, H.; Lian, M. Rock slope displacement prediction based on multi-source information fusion and SSA-DELM model. Front. Environ. Sci. 2022, 10, 982069. [Google Scholar] [CrossRef]
- Qiao, L.; Jia, Z.; Cui, Y. Shear Sonic Prediction Based on DELM Optimized by Improved Sparrow Search Algorithm. Appl. Sci. 2022, 12, 8260. [Google Scholar] [CrossRef]
- Wang, X. User variable load forecasting based on FPA-DELM. J. Electrotechnol. Electr. Eng. Manag. 2022, 5, 48–55. [Google Scholar]
- Chong, H.Y.; Gortler, S.J.; Zickler, T. The von Kries hypothesis and a basis for color constancy. In Proceedings of the IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007; pp. 1–8. [Google Scholar]
- Abualigah, L.; Diabat, A.; Mirjalili, S. The arithmetic optimization algorithm. Comput. Methods Appl. Mech. Eng. 2021, 376, 113609. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: A new learning scheme of feedforward neural networks. IEEE Int. Jt. Conf. Neural Netw. 2004, 2, 985–990. [Google Scholar]
- Wazi, M.T.; Ali, D.S.; Al-Saidi, N.M.G. A secure image cryptosystem via multiple chaotic maps. Discret. Math. Algorithms Appl. 2022, 14, 2150141. [Google Scholar] [CrossRef]
- Weijer, J.; Gevers, T.; Gijsenij, A. Edge-based color constancy. IEEE Trans. Image Process. 2007, 16, 2207–2214. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vereshchagin, N.K.; Vitányi, P.M.B. Kolmogorov’s structure functions and model selection. IEEE Trans. Inf. Theory 2004, 50, 3265–3290. [Google Scholar] [CrossRef]
- Zhang, K.; Luo, M. Outlier-robust extreme learning machine for regression problems. Neurocomputing 2015, 151, 1519–1527. [Google Scholar] [CrossRef]
- Majumder, I.; Dash, P.K.; Bisoi, R. Short-term solar power prediction using multi-kernel-based random vector functional link with water cycle algorithm-based parameter optimization. Neural Comput. Appl. 2020, 32, 8011–8029. [Google Scholar] [CrossRef]
- Afifi, M.; Brown, M.S. Interactive White Balancing for Camera-Rendered Images. In Proceedings of the IS&T 28th Color and Imaging Conference, Online, 4–19 November 2020; pp. 136–141. [Google Scholar]
- Afifi, M.; Price, B.; Cohen, S. When color constancy goes wrong: Correcting improperly white-balanced images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 1535–1544. [Google Scholar]
- Afifi, M.; Brown, M.S. What else can fool deep learning? Addressing color constancy errors on deep neural network performance. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 243–252. [Google Scholar]
- Finlayson, G.D.; Trezzi, E. Shades of gray and colour constancy. Color and Imaging Conference. Soc. Imaging Sci. Technol. 2004, 1, 37–41. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Light Source Name | Color Temperature | Color Index | Type of Light Source |
|---|---|---|---|
| TL83 | 3000 K | 85 | European commercial fluorescence |
| U35 | 3500 K | 85 | American commercial fluorescence |
| TL84 | 4000 K | 85 | European commercial fluorescence |
| CWF | 4150 K | 62 | American commercial fluorescence |
| D50 | 5000 K | 95+ | Filtered tungsten lamp |
| D65 | 6500 K | 95+ | Filtered tungsten lamp |
| Number of Hidden Layers | Average Accuracy | Standard Deviation | Maximum Accuracy | Minimum Accuracy | Median Accuracy | Time Cost (s) |
|---|---|---|---|---|---|---|
| 1 | 94.47% | 0.0318 | 96.82% | 88.91% | 94.47% | 0.1513 |
| 2 | 95.08% | 0.0118 | 96.69% | 91.56% | 95.31% | 0.2624 |
| 3 | 89.71% | 0.0083 | 92.49% | 88.21% | 89.54% | 0.3699 |
| 4 | 89.32% | 0.0071 | 91.21% | 88.03% | 89.23% | 0.4801 |
| 5 | 89.21% | 0.0059 | 90.44% | 87.95% | 89.31% | 0.5796 |
| 6 | 89.27% | 0.0056 | 90.54% | 88.01% | 89.24% | 0.6649 |
| 7 | 88.68% | 0.0073 | 90.52% | 87.03% | 88.62% | 0.7578 |
| Activation Function | Sigmoid | Sine | Hardlim | Sign | Tribas |
|---|---|---|---|---|---|
| 0.0387 | 0.0465 | 0.0415 | 0.0404 | 0.0541 |
| Algorithm | Parameter | Value |
|---|---|---|
| AOA-DELM | Number of populations | 30 |
| 100 | ||
| 1 | ||
| 0.2 | ||
| Alpha | 5 | |
| GWO-DELM | Number of populations | 30 |
| 100 | ||
| WOA-DELM | Number of populations | 30 |
| 100 | ||
| HHO-DELM | Number of populations | 30 |
| 100 | ||
| ORELM [33] | C | 230 |
| ELM | NumberofHiddenNeurons | 600 |
| RVFL [34] | Option.mode | 2 |
| Option.Scale | 1 | |
| Option.ActivationFunction | “sig” | |
| Option.Scalemode | 3 | |
| BP | Net.trainParam.epochs | 100 |
| Net.trainParam.Ir | 0.1 | |
| Net.trainParam.goal | 0.001 |
| IAOA-DELM | AOA-DELM | GWO-DELM | WOA-DELM | HHO-DELM | |
|---|---|---|---|---|---|
| Time cost (s) | 18.31 | 17.97 | 28.46 | 29.73 | 41.45 |
| Algorithm | Mean | Med | Best 25% | Worst 25% |
|---|---|---|---|---|
| Interactive WB Method [35] | 3.63 | 3.46 | 0.94 | 6.94 |
| Data-Driven WB Method [36] | 3.49 | 3.04 | 0.87 | 5.86 |
| WB color augmenter [37] | 3.18 | 3.53 | 0.79 | 6.37 |
| Grey-World [7] | 7.81 | 7.34 | 1.62 | 9.78 |
| White-Patch [5] | 6.14 | 5.76 | 1.03 | 9.31 |
| Shades of Grey [38] | 5.12 | 4.86 | 1.12 | 9.76 |
| IAOA-DELM (ours) | 2.81 | 3.12 | 0.91 | 4.32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Yu, Q.; Chen, S.; Yang, D. Underwater Image Color Constancy Calculation with Optimized Deep Extreme Learning Machine Based on Improved Arithmetic Optimization Algorithm. Electronics 2023, 12, 3174. https://doi.org/10.3390/electronics12143174
Yang J, Yu Q, Chen S, Yang D. Underwater Image Color Constancy Calculation with Optimized Deep Extreme Learning Machine Based on Improved Arithmetic Optimization Algorithm. Electronics. 2023; 12(14):3174. https://doi.org/10.3390/electronics12143174
Chicago/Turabian StyleYang, Junyi, Qichao Yu, Sheng Chen, and Donghe Yang. 2023. "Underwater Image Color Constancy Calculation with Optimized Deep Extreme Learning Machine Based on Improved Arithmetic Optimization Algorithm" Electronics 12, no. 14: 3174. https://doi.org/10.3390/electronics12143174
APA StyleYang, J., Yu, Q., Chen, S., & Yang, D. (2023). Underwater Image Color Constancy Calculation with Optimized Deep Extreme Learning Machine Based on Improved Arithmetic Optimization Algorithm. Electronics, 12(14), 3174. https://doi.org/10.3390/electronics12143174