1. Introduction
In recent years, automated and intelligent systems have been developed and implemented across various industries to enhance user convenience and safety. This trend has also influenced the automotive industry, where extensive research on various autonomous driving technologies is being conducted worldwide to achieve high efficiency and performance. Autonomous driving control techniques can be divided into longitudinal and lateral controls, with implications for driving stability and driving comfort. The lateral control is closely related to path-tracking problems and uses independent driving and steering systems, with steer-by-wire (SBW) and drive-by-wire (DBW) systems. Various control theories are being developed and applied for the chassis control of autonomous vehicles, with classic control, modern control, and learning-based control algorithms being actively researched in universities and research institutions.
Saruchi et al. (2020) proposed a fuzzy proportional–integral–derivative (PID) control for motion sickness (MS) minimization control structure that adopted the interaction of lateral acceleration and the head tilt concept to minimize MS [
1]. Kebbati et al. (2021) implemented an adaptive PID control using a genetic algorithm and neural network approaches for longitudinal control in autonomous vehicles [
2]. Azar et al. (2019) applied a PID control for automated parking and utilized the particle-swarm optimization (PSO) method for tuning the appropriate gain values [
3]. Max et al. (2018) considered uncertainties in autonomous vehicles using the SBW system and evaluated the performance using the robust H-infinity control through hardware-in-the-loop-simulation (HILS) [
4]. Guo et al. (2020) proposed a robust H-infinity fault-tolerant state feedback lateral control algorithm to compensate for the steering-wheel failure of an autonomous vehicle with a four-wheel independent steering system and to secure path-tracking performance [
5]. Li et al. (2017) presented a distributed H-infinity control for platooning in autonomous vehicles, ensuring robust stability, tracking performance, and heterogeneous string stability [
6]. Park et al. (2021) proposed a control method for self-driving cars that enables drift maneuvers for fast cornering. Park’s proposed feedback control algorithm was designed using a linear quadratic regulator (LQR) to track a circular trajectory and maintain the drift equilibrium state [
7]. Guo et al. (2021) applied extended state observer (ESO)-based LQR for the path following an autonomous bus. The ESO was utilized to estimate the dynamics and model uncertainties of the bus in real time, with the estimated disturbance being incorporated into the LQR for path tracking [
8]. Gonschorek et al. (2022) proposed modeling, control synthesis, control loop analysis, and vehicle performance evaluation for position control of the front-axle actuator of the SBW system. To control of the SBW system, a linear quadratic Gaussian control was designed using a linearized model of the SBW system [
9]. Lee et al. (2019) introduced an adaptive q-matrix-based linear quadratic Gaussian (LQG) control algorithm for path tracking in autonomous vehicles, aiming to minimize errors and noise in localization and path planning. To confirm the performance of Lee’s proposed control algorithm, it was compared with pure pursuit and the Stanley method [
10]. Peng et al. (2020) proposed a model predictive control (MPC) with a finite time horizon for path tracking and direct yaw moment control (DYC) implementation in four-wheeled autonomous driving vehicles [
11]. Wang et al. (2021) utilized recursive least squares (RLS) to estimate cornering stiffness, which incorporates time-varying uncertainties, in real time for path tracking in autonomous vehicles equipped with a four-wheel independent driving system. The estimated parameters were then used to design an adaptive model predictive control (AMPC) [
12]. Chen et al. (2020) designed an MPC to ensure autonomous vehicle path-tracking performance and handling stability in extreme conditions by considering multiple constraint conditions [
13]. Pang et al. (2022) presented a linear time-varying model predictive control (LTV-MPC) approach based on a vehicle kinematic model for autonomous path tracking [
14]. Cheng et al. (2020) proposed a linear matrix inequality model predictive control (LMI-MPC) to compensate for the performance degradation caused by parametric uncertainty and time-varying factors [
15]. To ensure path-tracking performance, various control algorithms, such as classical control, robust control, optimal control, and predictive control, have been applied [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15]. The disturbances and uncertainties that can affect autonomous vehicles, such as tire nonlinearity, vehicle parameters, and sensor noise, lead to performance degradation. Therefore, various adaptive algorithms based on learning and estimation techniques have been proposed to compensate for the control performance of autonomous vehicles. These adaptive algorithms involve the real-time tuning of control gains or the estimation of parameters that incorporate disturbance and parametric uncertainty in the system [
2,
3,
7,
10,
12].
Liang et al. (2020) proposed a variable-speed method based on sliding mode and a second-order quasi-continuous (QC) method based on the path-tracking algorithm considering the friction limit of the road surface, for clothoid-based path-tracking [
16]. Tagne et al. (2013) proposed a high-order sliding mode control (HOSMC) for the lateral control of autonomous vehicles. HOSMC was proposed to reduce the chattering phenomenon, a limitation of SMC, while utilizing the robustness of SMC against model nonlinearity and parametric uncertainty [
17]. Wang et al. (2016) proposed an adaptive sliding mode control (ASMC) with a Takagi–Sugeno (T–S) fuzzy model to account for the changing cornering stiffness in extreme handling situations and to represent the tire nonlinearity and the nonlinearity of the control input [
18]. Ferrara et al. (2019) presented an adaptive optimization-based second-order sliding mode control (SOSMC) to ensure finite time convergence and robust control in uncertain nonlinearities in autonomous vehicles while minimizing control effort [
19]. Hu et al. (2016) proposed a super-twisting algorithm (STA)-based integral sliding mode control (ISMC) for the path-following control of a four-wheel independent-driving autonomous vehicle through active front steering (AFS) and DYC [
20]. Xu et al. (2017) proposed a model-free adaptive sliding mode control (MF-ASMC) for the parking systems of autonomous vehicles, incorporating the online identification of the object model and constraints on control inputs based on data-driven techniques [
21]. Bei et al. (2022) presented an integrated adaptive preview control with SOSMC for path-tracking autonomous vehicles, comparing its performance with MPC [
22]. Rivera et al. (2011) described the application of the STA in motion-control systems to compensate for performance degradation caused by the chattering phenomenon, a limitation of SMC [
23]. Kang et al. (2017) proposed a lateral control algorithm for the lanekeeping of autonomous vehicles by estimating lateral velocity based on a second-order linear dynamic model and utilizing backstepping [
24]. Ao et al. (2021) developed a super-twisting sliding mode control (STSMC) based on Lyapunov theory to achieve robust path tracking and reduce the chattering phenomenon in autonomous vehicles, demonstrating the stability of the control system through the application of backstepping [
25]. Norouzi et al. (2019) designed the backstepping-based SMC, defined the Lyapunov function, and proved its stability. Norouzi’s proposed control algorithm confirmed reasonable performance compared with the backstepping control at low road friction [
26]. Wang et al. (2019) proposed a vehicle–road system model and designed a backstepping-based SMC, robust to disturbance and time-varying factors, for autonomous vehicles [
27]. SMC is a robust control against disturbance and parametric uncertainty. However, it can cause system overload and failure due to the chattering phenomenon [
17,
23,
25]. In addition, it has a limitation that control stability is lost due to excessive nonlinearity in the system [
16,
17,
18]. To overcome these limitations, various control methods have been proposed, such as SMC, SOSMC, and HOSMC with backstepping [
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27].
Wang et al. (2019) proposed SMC based on RBFNN to reduce the speed tracking error and chattering phenomenon in the longitudinal control of autonomous vehicles [
28]. Sun et al. (2020) presented an integrated terminal sliding mode control (ITSMC) based on neural networks for collision avoidance steering control in autonomous vehicles. RBFNN was utilized to approximate the upper bound of system uncertainties online without requiring prior knowledge, thereby achieving robust control performance [
29]. In another work by Sun et al. (2022) the authors proposed a dual-hidden-layer output feedback neural network for the fast nonsingular terminal sliding mode control (FNTSMC) The proposed control algorithm for autonomous lateral control utilized a neural network model to estimate parametric uncertainties and achieved robust control performance [
30]. Swain et al. (2021) addressed the chattering phenomenon in SMC and reduced the impact of external disturbance by using RBFNN to estimate the equivalent control input, along with proposing a high-order sliding mode-based switching control algorithm [
31]. Ji et al. (2018) proposed a robust lateral control algorithm and a neural network approximator to maintain yaw stability in autonomous vehicles, considering the tire’s nonlinearity and external disturbance under various driving conditions [
32]. Negash et al. (2022) proposed platoon control using an adaptive radial basis function neural network (ARBFNN)-based SMC to track the course and optimal speed of an autonomous vehicle [
33]. Chen et al. (2021) constructed a vehicle control architecture for autonomous lateral control by combining deep reinforcement learning (DRL) with proximal policy optimization (PPO) and pure pursuit [
34]. Zhang et al. (2018) proposed a double Q-learning-based reinforcement learning approach for longitudinal speed control in vehicles using naturalistic driving data, demonstrating reasonable control performance compared to a deep Q-learning algorithm [
35]. Ma et al. (2018) enhanced and improved the existing game theory framework by adding noncompetitive incentives to dynamically adjust the disturbance magnitude and evaluated the efficiency and safety tradeoff for autonomous driving [
36]. Kwon et al. (2022) proposed a lateral control methodology for autonomous vehicles that utilizes behavior cloning through an end-to-end learning system, making use of the driver data. Their proposed control algorithm was evaluated through various simulator environments [
37]. Chai et al. (2022) proposed a real-time trajectory planning and tracking framework for autonomous vehicles. To approximate the optimal parking trajectory, motion planning was performed using a deep neural network (DNN) using a recurrent neural network (RNN) structure [
38]. Tang et al. (2022) proposed a weight adaptation model predictive control system using a particle-swarm optimization back-propagation (PSO-BP) neural network to follow the path of an autonomous vehicle at various vehicle speeds and curvatures [
39]. Huang et al. (2023) proposed a differentiable integrated prediction and planning framework that utilizes neural networks to predict the future state of nearby traffic participants, safe trajectories, and path planning for autonomous vehicles [
40]. Wang et al. (2022) collected data by establishing a driving environment with an autonomous vehicle and a human driver for the car-following behavior of autonomous vehicles and performed velocity control using a soft actor-critic (SAC) algorithm [
41]. Zhang et al. (2022) proposed a receding horizon reinforcement learning approach for the kino-dynamic motion planning (RHRL-KDP) of autonomous vehicles in the presence of inaccurate dynamics information and moving obstacles [
42]. Xiao et al. (2023) applied the deep Koopman operator for the nonlinear dynamic modeling of an autonomous vehicle and designed a linear model predictive control based on the resulting model to perform longitudinal and lateral control [
43]. Shi et al. (2022) propose a deep reinforcement learning (DRL)-based distributed longitudinal control strategy for connected and automated vehicles under communication failure to stabilize traffic oscillations [
44]. Geng et al. proposed a neural network predictive control algorithm based on a back-propagation neural network using PSO with fitness-allocating inertia weights and examined the autonomous driving path-following problem in high-speed turning conditions [
45]. Various research studies have been conducted on learning-based control algorithms, including artificial neural networks (ANN), RNN, DNN, and DRL. In addition, various studies, including path planning and end-to-end neural networks, have been conducted [
38,
40,
42]. As can be seen in this control approach, it was confirmed that the predetermination of the parameters constituting the neural network was important, as was the identification of the appropriate training dataset for neural network learning [
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
37,
39,
41,
43,
44,
45]. RBFNN has been proposed in various methodologies to compensate for system disturbance and parametric uncertainty, as well as to address the chattering phenomenon in sliding mode controllers [
28,
29,
30,
31,
32,
33].
The definition of a mathematical model representing the physical characteristics of the system is crucial for achieving reasonable control performance with sliding mode controllers. However, there is a limitation when applying an unreasonable mathematical model along with the previously mentioned chattering phenomenon and excessive disturbances, which can lead to the loss of control stability. To overcome these limitations, methodologies have been proposed that combine fuzzy logic and ANN to estimate disturbances in control systems and enhance control performance. Among these, RBFNN stands out for its simplicity and ease of design [
46]. STSMC has been developed to enhance the robustness of sliding mode controllers and reduce the chattering phenomenon [
24,
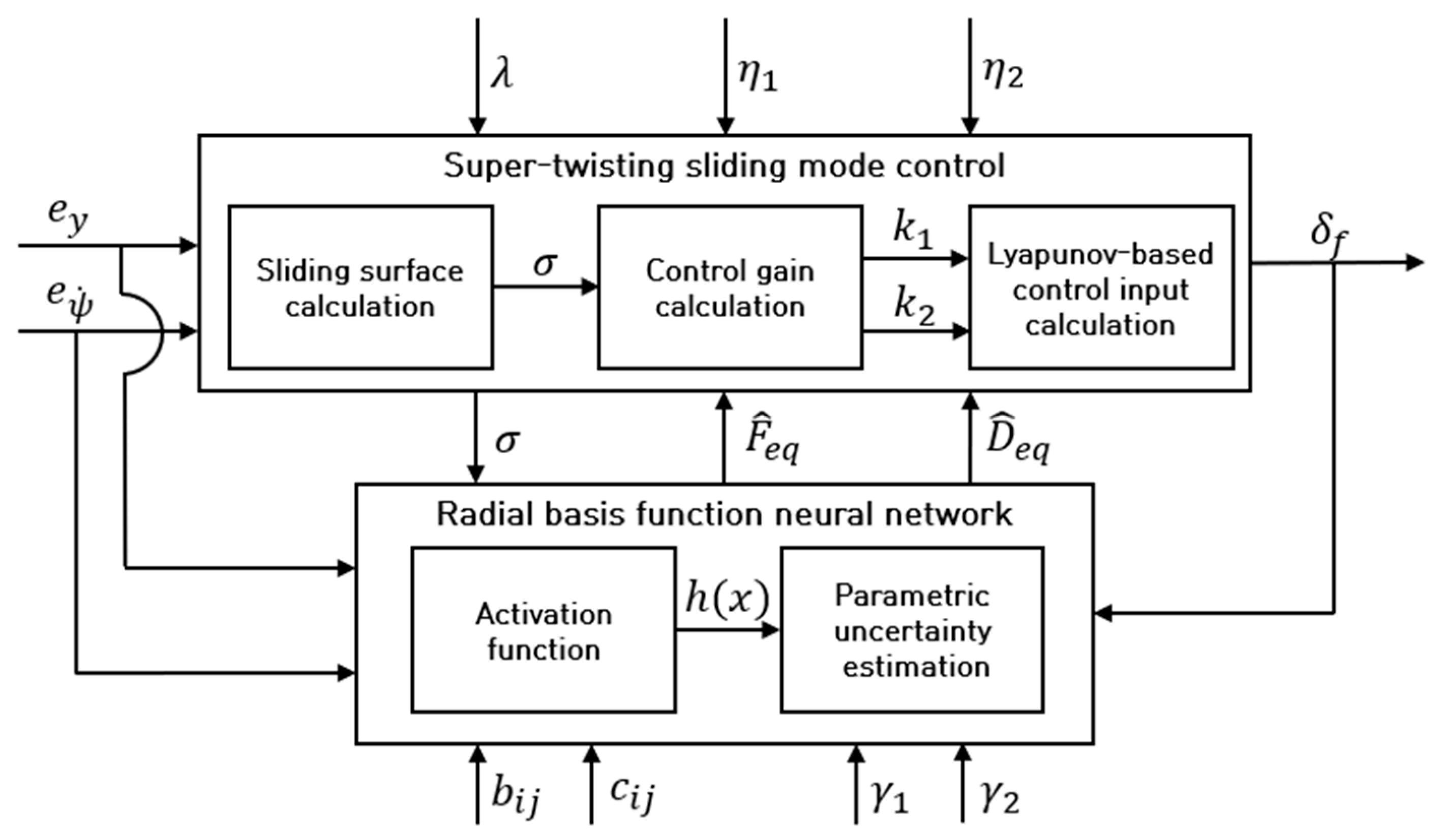
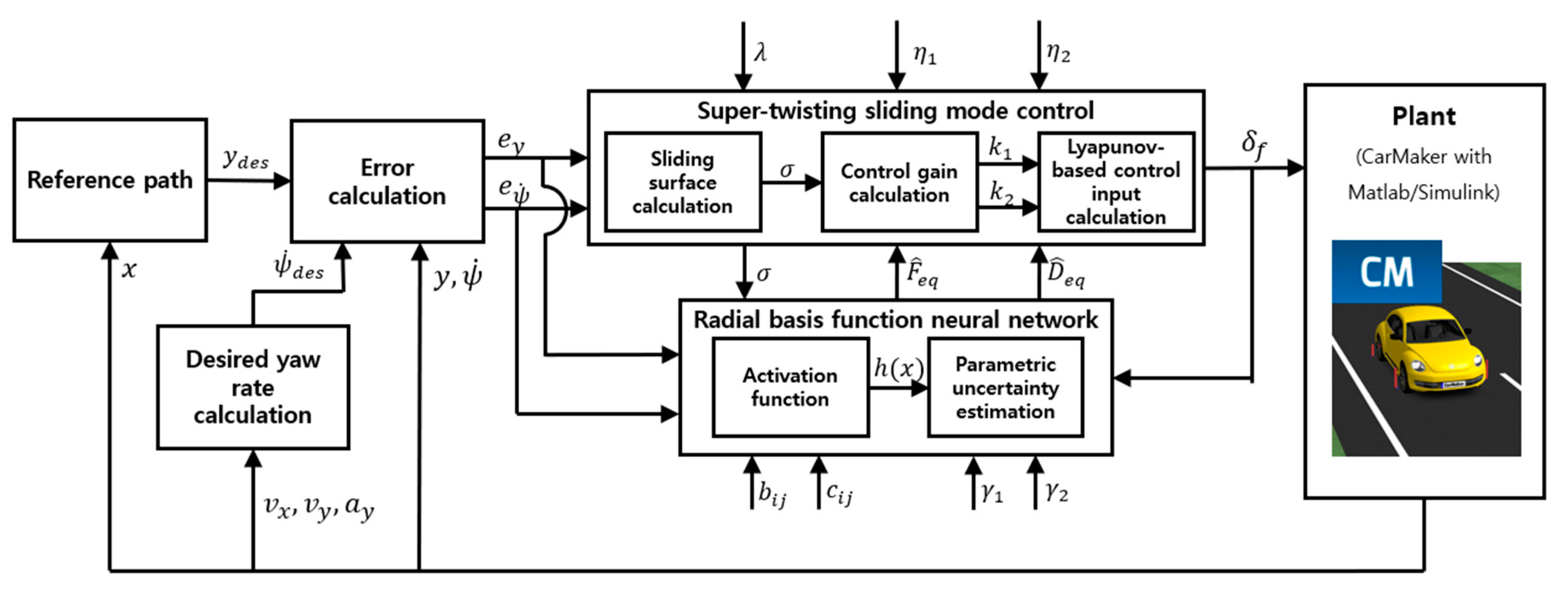
25]. For achieving reasonable and safe autonomous driving, defining the mathematical model of the system, and determining appropriate control gain values are essential. In this study, to approach the path-tracking method in autonomous vehicles with more robustness and adaptation, a learning-based robust control algorithm was proposed. This control algorithm contains the STSMC, which offers higher robustness and reduces chattering attenuation compared to SMC, with the RBFNN for estimating parametric uncertainty and disturbances. The contributions of the proposed research are outlined below:
The STSMC is proposed for the robust path-tracking of autonomous vehicles. This controller is utilized to reduce chattering and improve driving stability. The stability proof of the proposed controller is proven using the Lyapunov method, and conditions for the control gain values are derived.
RBFNN is designed to estimate parametric uncertainties and disturbances in autonomous vehicles. By using the Lyapunov method, the RBFNN is combined with the STSMC, ensuring parameter estimation and stability proof.
By using estimated parameters, including parametric uncertainties and disturbances, the steering control input is adaptively adjusted in real time with the control gain. This adaptive rule ensures effective responses to variations in system dynamics and uncertainties.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}