
Real Time Assessment of Smart Concrete Inspection with Piezoelectric Sensors

 , , ,
, , , 

Abstract
:1. Introduction
2. Methodology
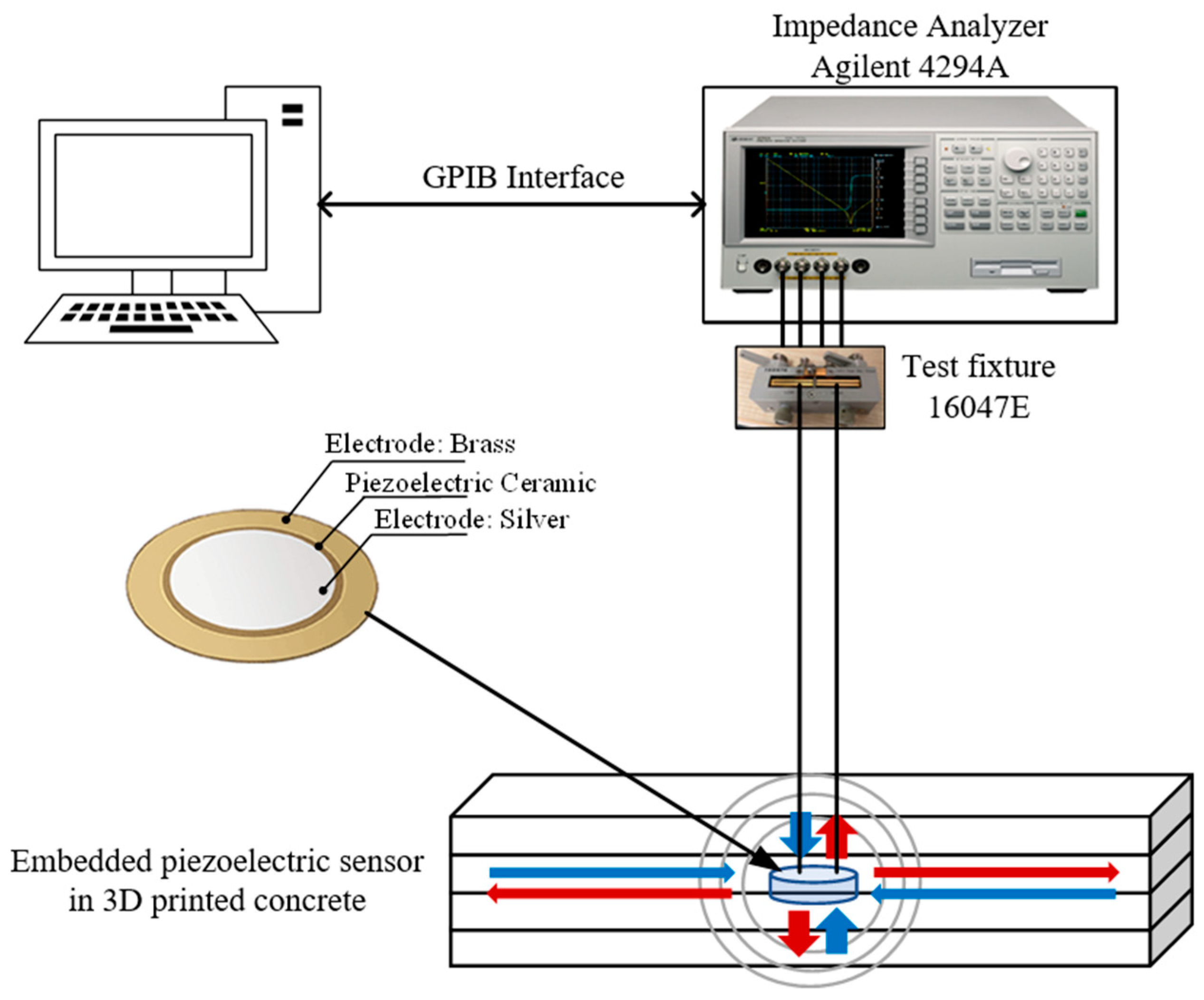
2.1. Electromechanical Impedance Method
2.2. Three-Dimensional Printing Setup
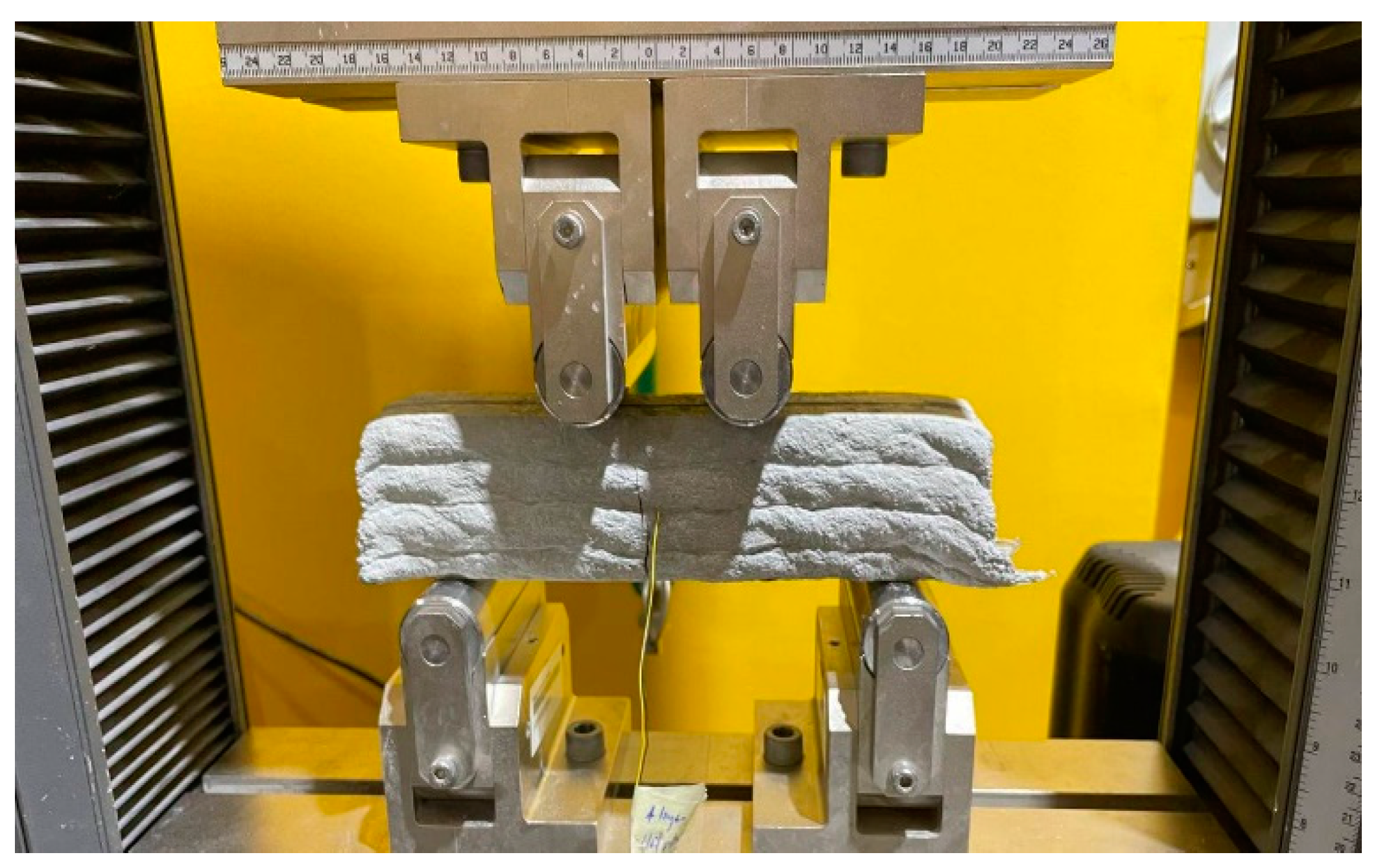
2.3. Mechanical Testing
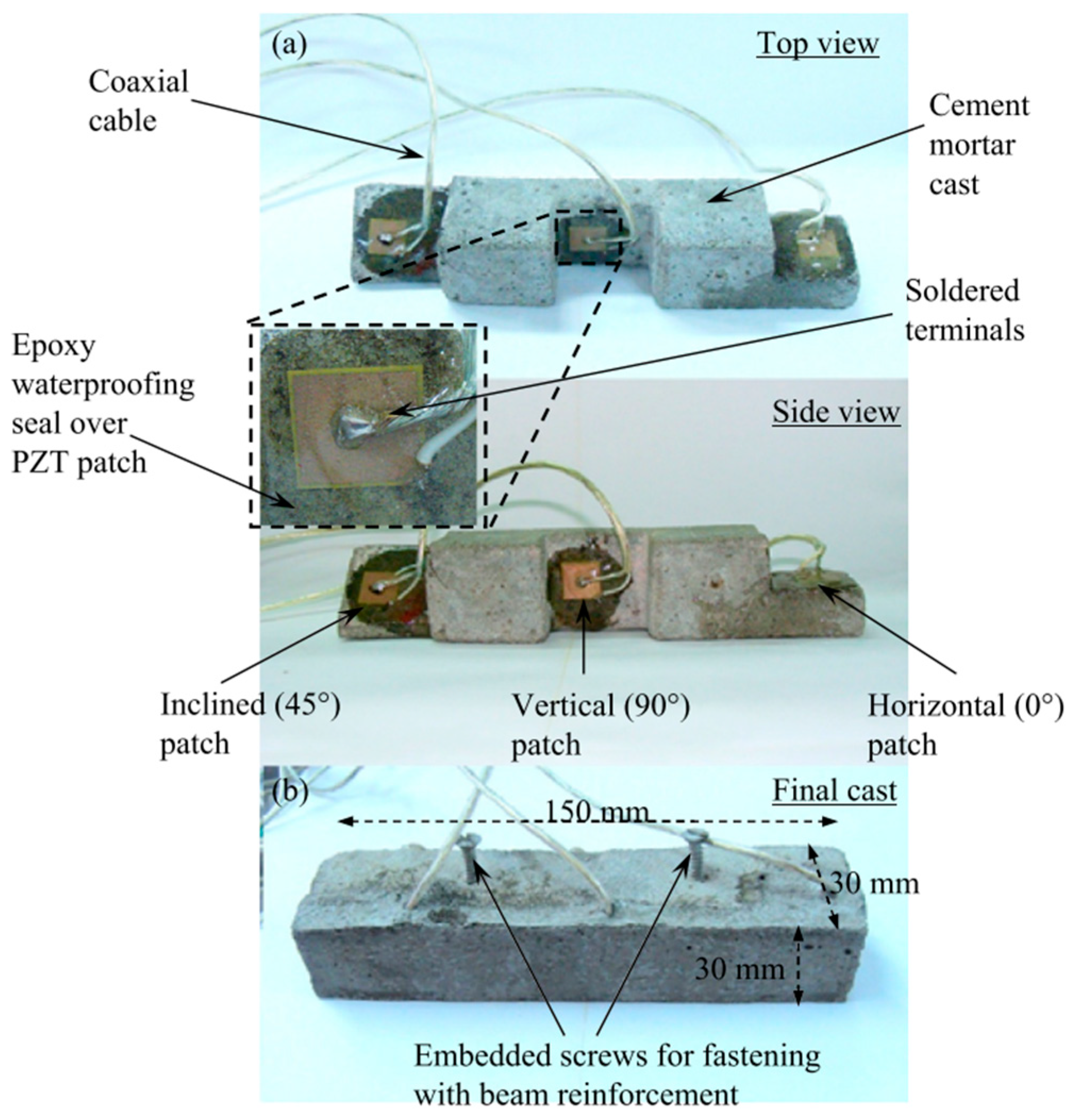
2.4. Coating and Embedment Techniques
3. Results and Discussion
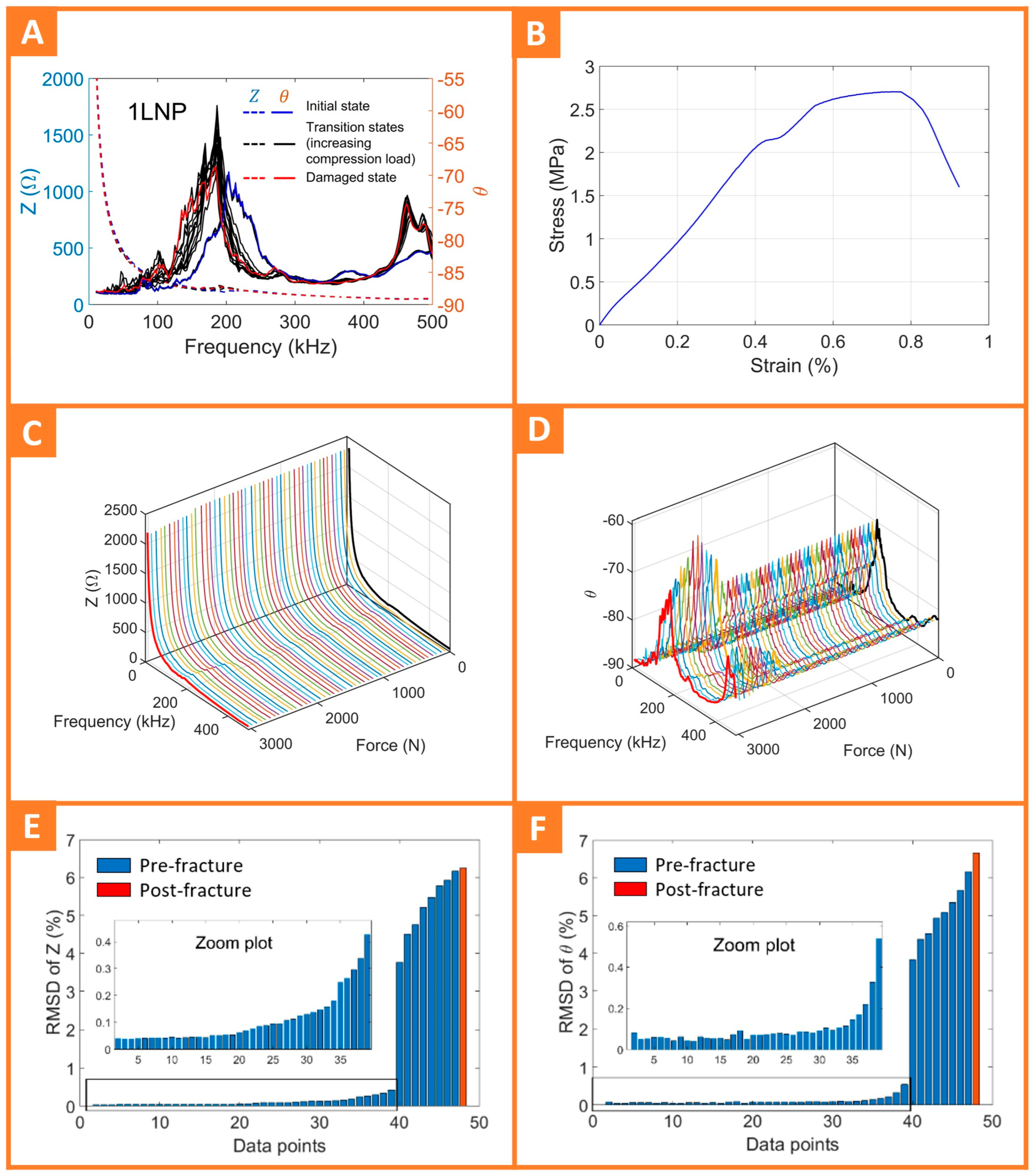
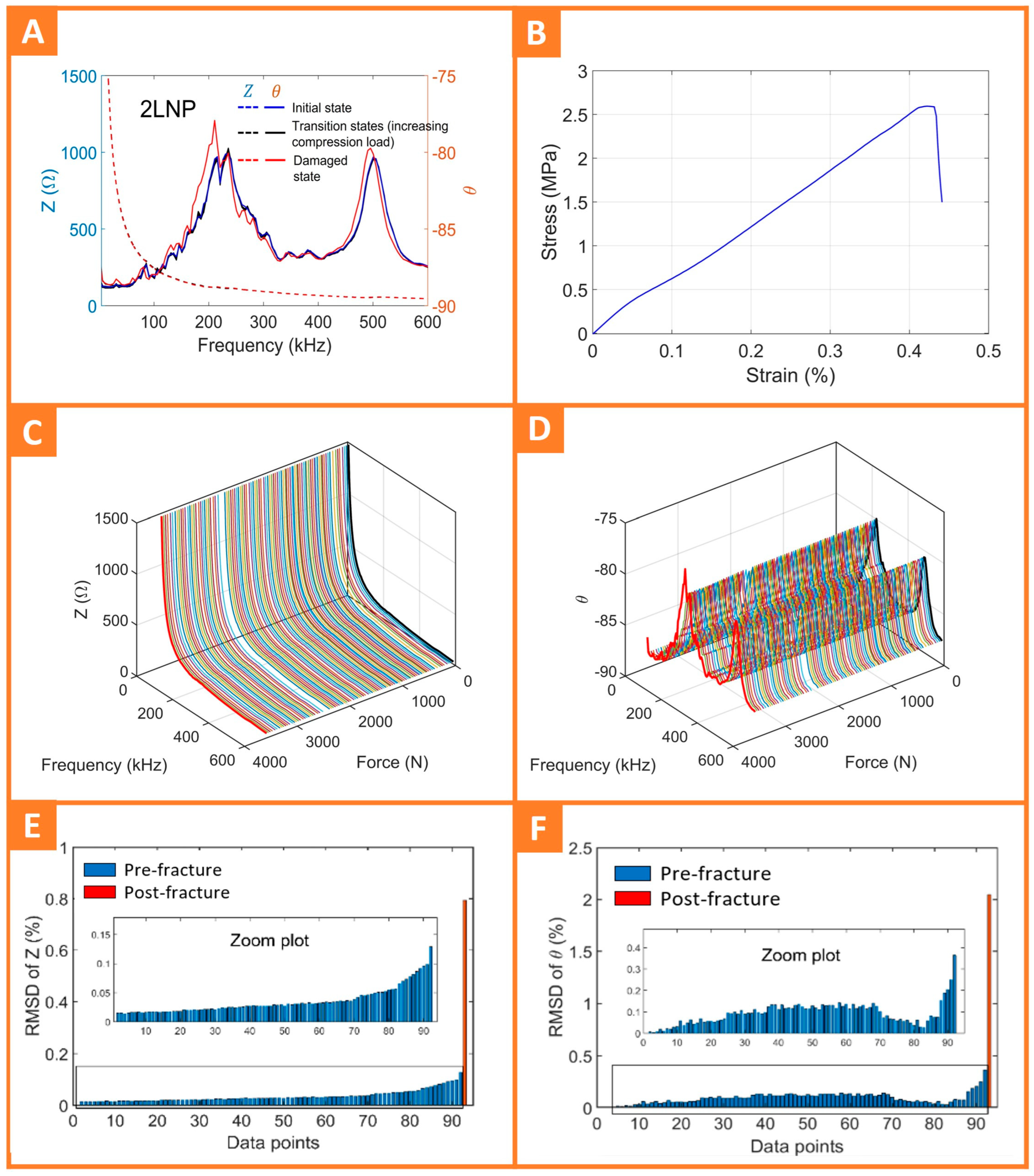
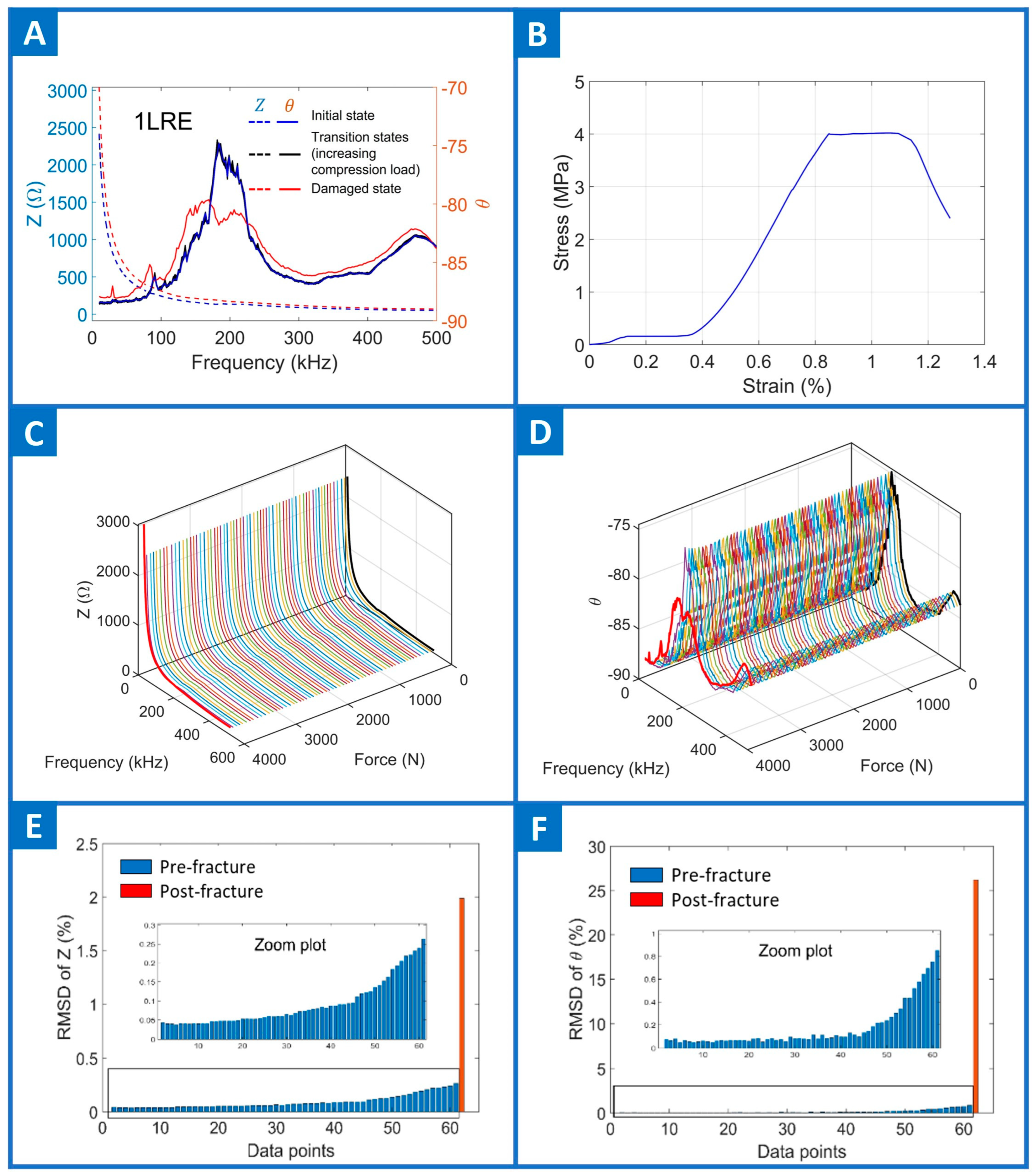
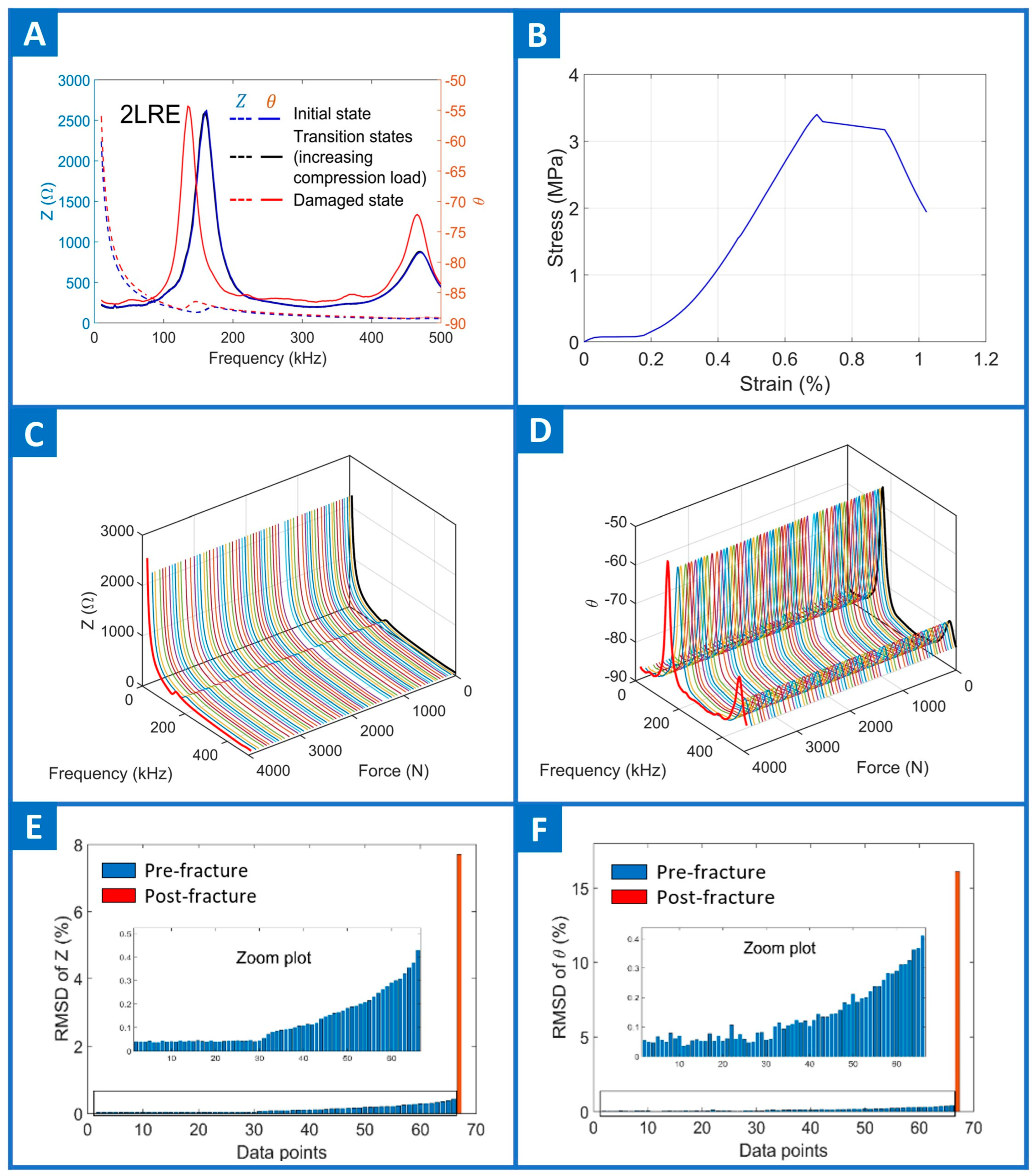
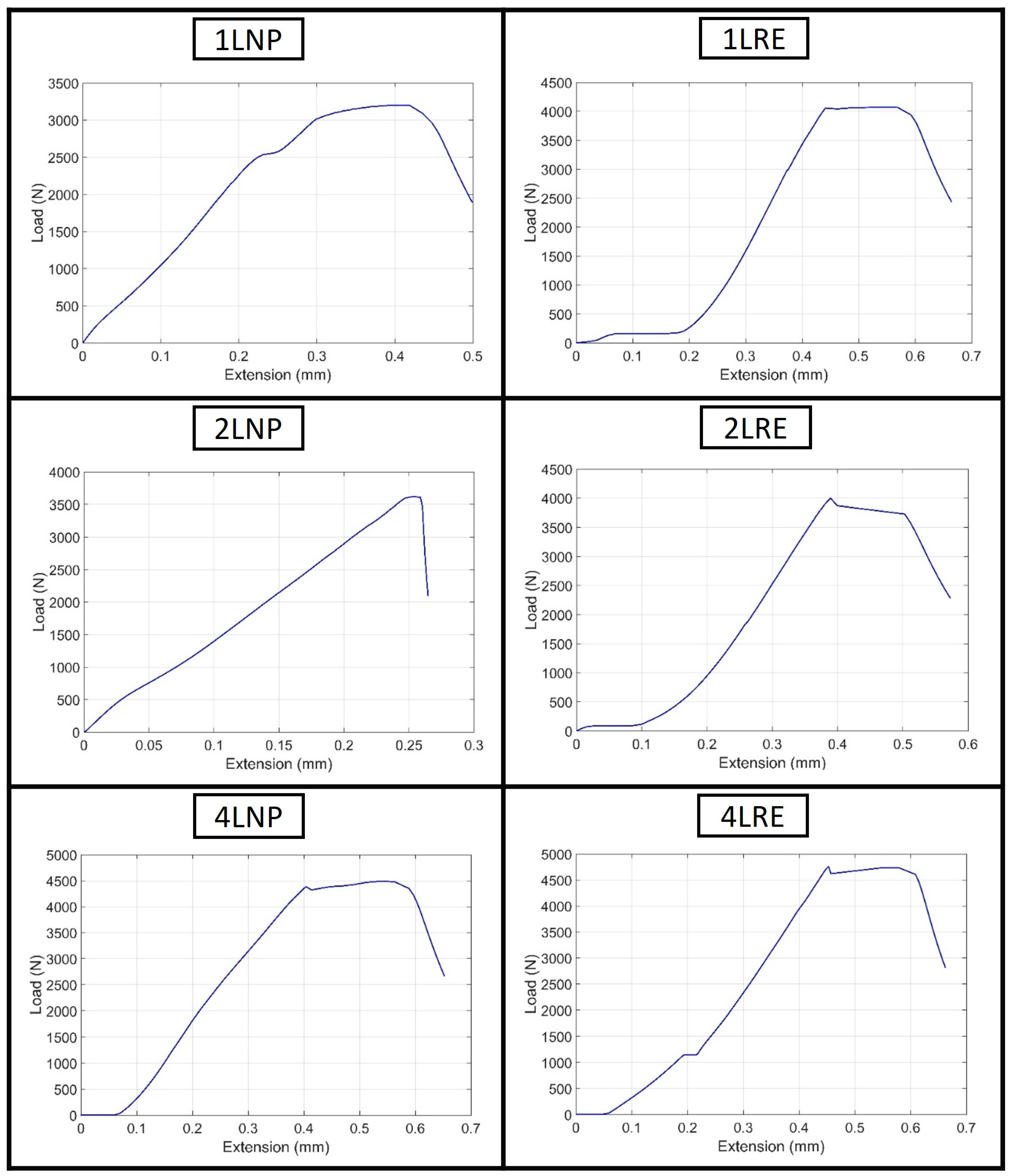
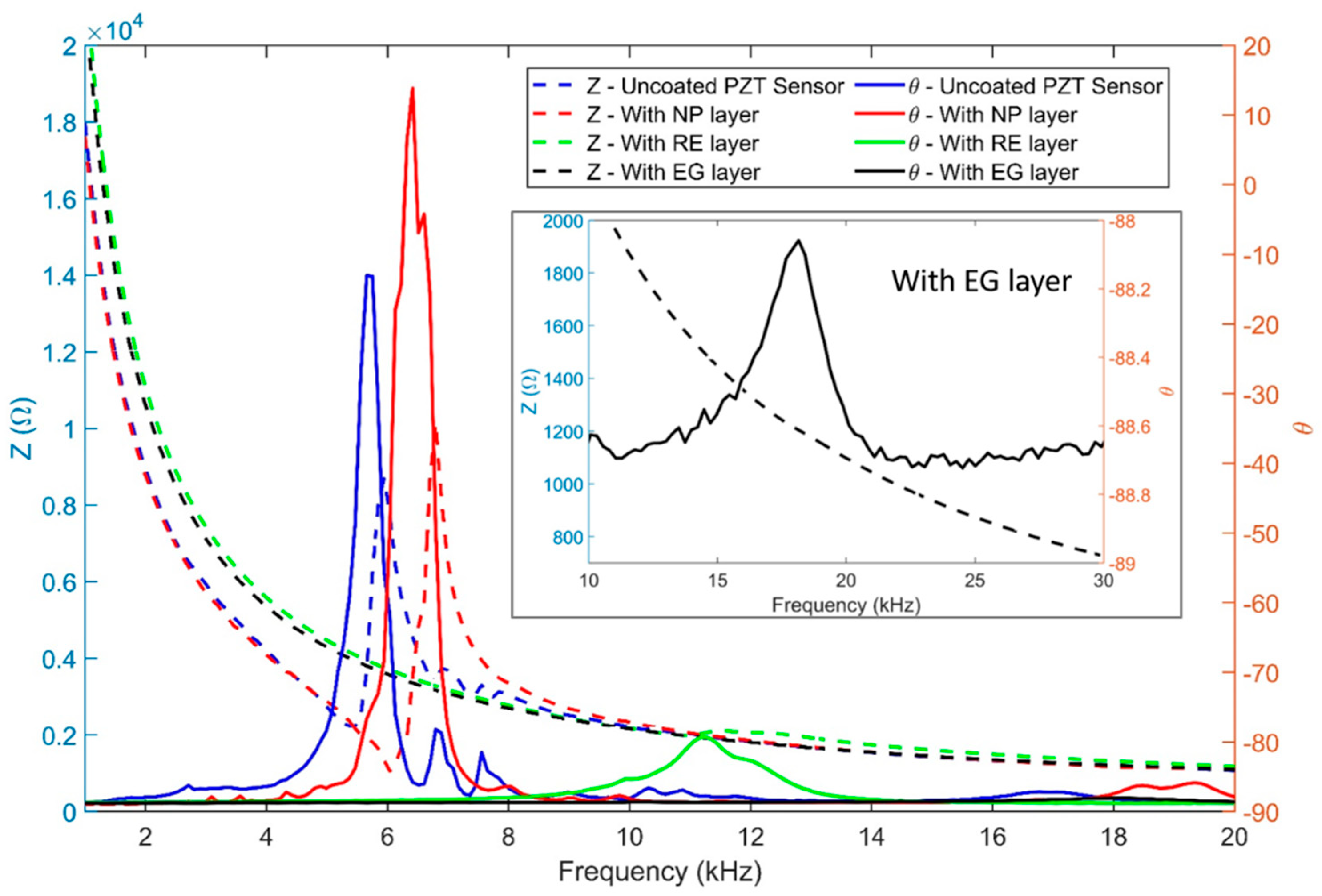
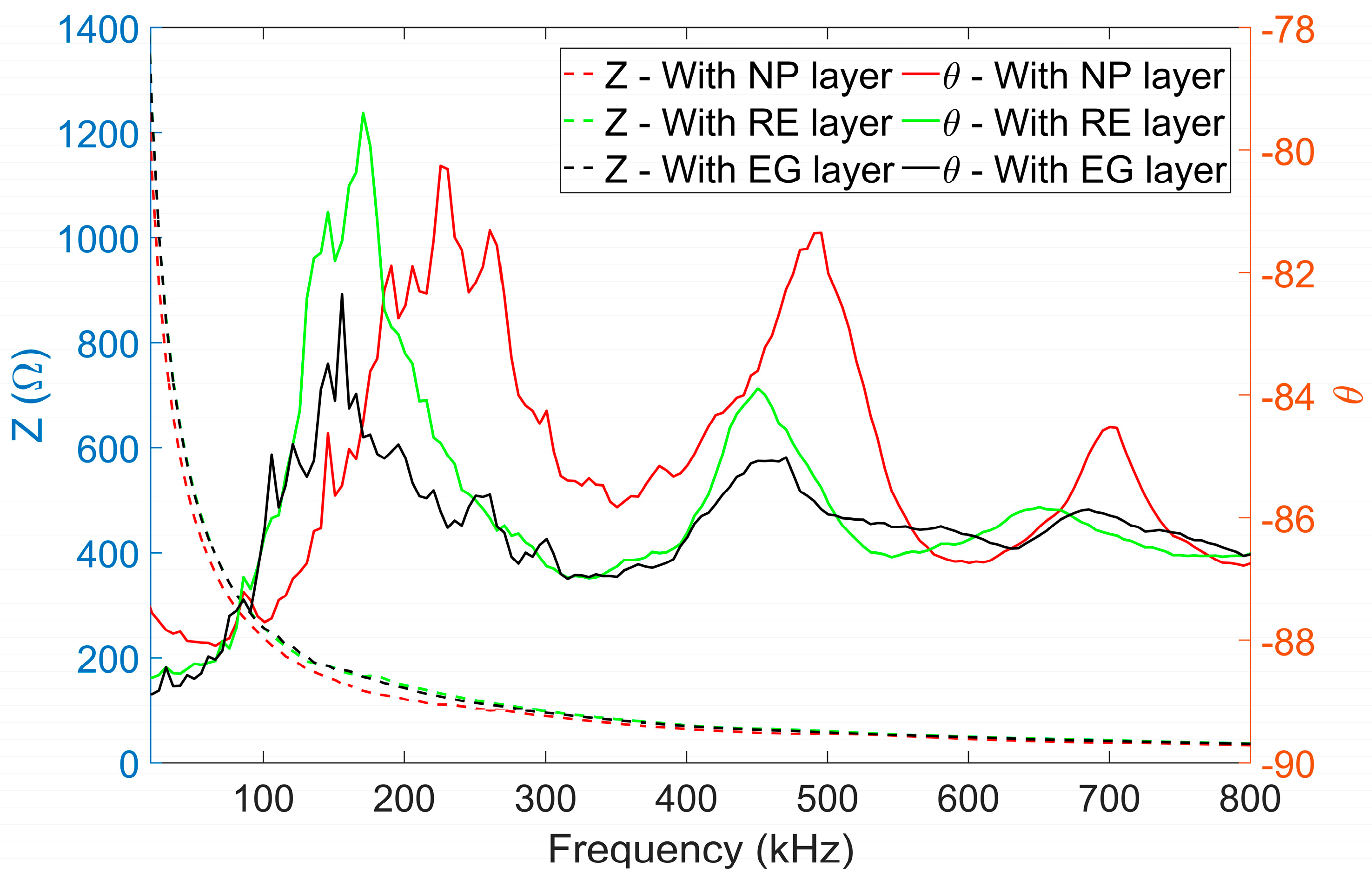
3.1. Effect of Different Coating Types
- Seche Vite Nail Polish (Nail Polish—NP)
- The main ingredient in a typical nail polish is ethyl acetate. This ingredient is normally used as a solvent that evaporates over time. The resulting hardened and durable film coating left behind is known as nitrocellulose (C18H21N11O38). This agent is derived from a naturally occurring polymer known as cellulose. The material was applied to the PZT sensor via coating.
- RS-Pro 132-605 Quick Set epoxy resin (resin epoxy—RE)
- This is a two-part synthetic polymer that hardens upon mixing. The resin is normally glycidyl ether/ester, which is coupled with a hardening agent that is usually polyamine. The resulting resin (C21H25ClO5) forms a three-dimensional network of polymer chains that would exhibit high strength, good chemical resistance, and adhesive properties. The material was applied to the PZT sensor via coating as well.
- EPICOTE 3175 putty (epoxy glue—EG)
- Epoxy putty has a similar composition to epoxy resin as a synthetic polymer. The resulting polymer will also exhibit a high strength and good chemical resistance. The clay-like consistency of this material can be moulded into its desired shape before hardening. Hence, protective application though casting was conducted with this material.
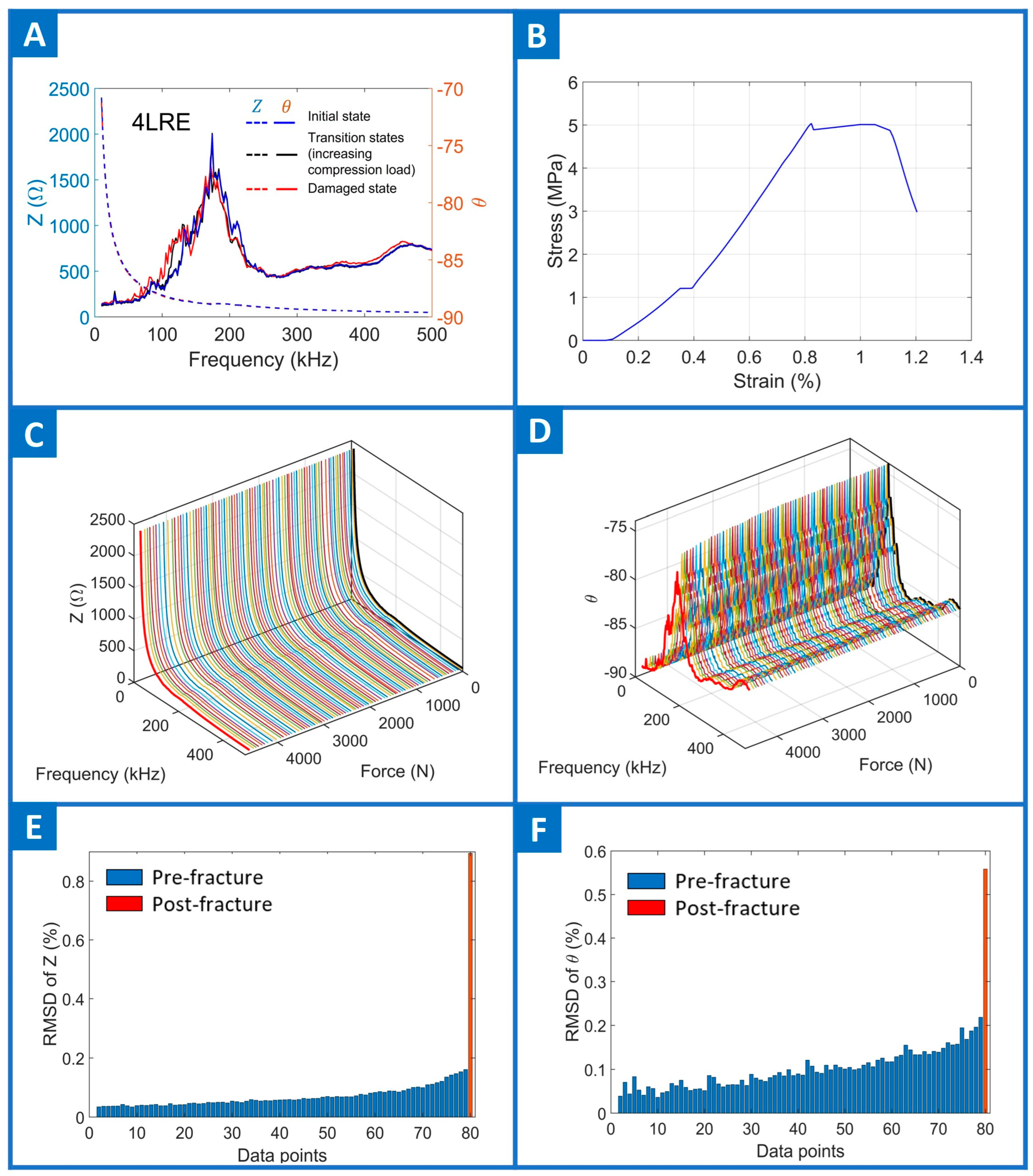
3.2. In-Situ Four-Point Bending Test
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Ou, J.; Li, H. Structural health monitoring research in China: Trends and applications. In Structural Health Monitoring of Civil Infrastructure Systems; Woodhead Publishing: Sawston, UK, 2009; pp. 463–516. [Google Scholar] [CrossRef]
- Kocur, G.K.; Saenger, E.H.; Grosse, C.U.; Vogel, T. Time reverse modeling of acoustic emissions in a reinforced concrete beam. Ultrasonics 2016, 65, 96–104. [Google Scholar] [CrossRef] [PubMed]
- Bremer, K.; Wollweber, M.; Weigand, F.; Rahlves, M.; Kuhne, M.; Helbig, R.; Roth, B. Fibre Optic Sensors for the Structural Health Monitoring of Building Structures. Procedia Technol. 2016, 26, 524–529. [Google Scholar] [CrossRef]
- Huang, X.; Wang, P.; Zhang, S.; Zhao, X.; Zhang, Y. Structural health monitoring and material safety with multispectral technique: A review. J. Saf. Sci. Resil. 2022, 3, 48–60. [Google Scholar] [CrossRef]
- He, J.H.; Liu, D.P.; Chung, C.H.; Huang, H.H. Infrared Thermography Measurement for Vibration-Based Structural Health Monitoring in Low-Visibility Harsh Environments. Sensors 2020, 20, 7067. [Google Scholar] [CrossRef]
- Dong, Y.; Ansari, F. Non-destructive testing and evaluation (NDT/NDE) of civil structures rehabilitated using fiber reinforced polymer (FRP) composites. In Service Life Estimation and Extension of Civil Engineering Structures; Woodhead Publishing: Sawston, UK, 2011; pp. 193–222. [Google Scholar] [CrossRef]
- Kumar, N.S.M.R.; Barkavi, T.; Natarajan, C. Structural health monitoring: Detection of concrete flaws using ultrasonic pulse velocity. J. Build. Pathol. Rehabil. 2018, 3, 1–9. [Google Scholar] [CrossRef]
- Roopa, A.K.; Hunashyal, A.M.; Venkaraddiyavar, P.; Ganachari, S.V. Smart hybrid nano composite concrete embedded sensors for structural health monitoring. Mater. Today Proc. 2020, 27, 603–609. [Google Scholar] [CrossRef]
- Maraveas, C.; Bartzanas, T. Sensors for Structural Health Monitoring of Agricultural Structures. Sensors 2021, 21, 314. [Google Scholar] [CrossRef]
- Merzbacher, C.I.; Kersey, A.D.; Friebele, E.J. Fiber optic sensors in concrete structures: A review. Smart Mater. Struct. 1996, 5, 196. [Google Scholar] [CrossRef]
- Strangfeld, C.; Johann, S.; Bartholmai, M. Smart RFID Sensors Embedded in Building Structures for Early Damage Detection and Long-Term Monitoring. Sensors 2019, 19, 5514. [Google Scholar] [CrossRef]
- Kot, P.; Muradov, M.; Gkantou, M.; Kamaris, G.S.; Hashim, K.; Yeboah, D. Recent Advancements in Non-Destructive Testing Techniques for Structural Health Monitoring. Appl. Sci. 2021, 11, 2750. [Google Scholar] [CrossRef]
- Han, B.; Zhang, L.; Ou, J. Smart and Multifunctional Concrete toward Sustainable Infrastructures; Springer: Singapore, 2017. [Google Scholar] [CrossRef]
- Ubertini, F.; D’Alessandro, A. Concrete with self-sensing properties. In Eco-Efficient Repair and Rehabilitation of Concrete Infrastructures; Woodhead Publishing: Sawston, UK, 2018; pp. 501–530. [Google Scholar] [CrossRef]
- Kong, H.; Managing, M.; Jien, L.; Director, P. Pre-Fabricated Pre-Finished Volumetric Construction (PPVC) For Residential Projects. Available online: https://www.surbanajurong.com.cn/wp-content/uploads/2018/08/1.-PPVC-Final-_18Sep18.pdf (accessed on 26 July 2023).
- Ting, G.H.A.; Quah, T.K.N.; Lim, J.H.; Tay, Y.W.D.; Tan, M.J. Extrudable region parametrical study of 3D printable concrete using recycled glass concrete. J. Build. Eng. 2022, 50, 104091. [Google Scholar] [CrossRef]
- Geng, Z.; She, W.; Zuo, W.; Lyu, K.; Pan, H.; Zhang, Y.; Miao, C. Layer-interface properties in 3D printed concrete: Dual hierarchical structure and micromechanical characterization. Cem. Concr. Res. 2020, 138, 106220. [Google Scholar] [CrossRef]
- Yao, H.; Xie, Z.; Li, Z.; Huang, C.; Yuan, Q.; Zheng, X. The relationship between the rheological behavior and interlayer bonding properties of 3D printing cementitious materials with the addition of attapulgite. Constr. Build. Mater. 2022, 316, 125809. [Google Scholar] [CrossRef]
- Sanjayan, J.G.; Nematollahi, B.; Xia, M.; Marchment, T. Effect of surface moisture on inter-layer strength of 3D printed concrete. Constr. Build. Mater. 2018, 172, 468–475. [Google Scholar] [CrossRef]
- Kruger, J.; Zeranka, S.; van Zijl, G. 3D concrete printing: A lower bound analytical model for buildability performance quantification. Autom. Constr. 2019, 106, 102904. [Google Scholar] [CrossRef]
- Wolfs, R.J.M.; Bos, F.P.; Van Strien, E.C.F.; Salet, T.A.M. A real-time height measurement and feedback system for 3D concrete printing. In High Tech Concrete: Where Technology and Engineering Meet, Proceedings of the 2017 Fib Symposium, Maastricht, The Netherlands, 12–16 June 2017; Springer International Publishing: Berlin/Heidelberg, Germany, 2017; pp. 2474–2483. [Google Scholar] [CrossRef]
- Quah, T.K.N.; Tay, Y.W.D.; Lim, J.H.; Tan, M.J.; Wong, T.N.; Li, K.H.H. Concrete 3D Printing: Process Parameters for Process Control, Monitoring and Diagnosis in Automation and Construction. Mathematics 2023, 11, 1499. [Google Scholar] [CrossRef]
- Wolfs, R.J.M.; Bos, F.P.; Salet, T.A.M. Hardened properties of 3D printed concrete: The influence of process parameters on interlayer adhesion. Cem. Concr. Res. 2019, 119, 132–140. [Google Scholar] [CrossRef]
- Wang, L.; Tian, Z.; Ma, G.; Zhang, M. Interlayer bonding improvement of 3D printed concrete with polymer modified mortar: Experiments and molecular dynamics studies. Cem. Concr. Compos. 2020, 110, 103571. [Google Scholar] [CrossRef]
- Hosseini, E.; Zakertabrizi, M.; Korayem, A.H.; Xu, G. A novel method to enhance the interlayer bonding of 3D printing concrete: An experimental and computational investigation. Cem. Concr. Compos. 2019, 99, 112–119. [Google Scholar] [CrossRef]
- Marchment, T.; Sanjayan, J.; Xia, M. Method of enhancing interlayer bond strength in construction scale 3D printing with mortar by effective bond area amplification. Mater. Des. 2019, 169, 107684. [Google Scholar] [CrossRef]
- Suiker, A.S.J.; Wolfs, R.J.M.; Lucas, S.M.; Salet, T.A.M. Elastic buckling and plastic collapse during 3D concrete printing. Cem. Concr. Res. 2020, 135, 106016. [Google Scholar] [CrossRef]
- Kruger, J.; Cho, S.; Zeranka, S.; Viljoen, C.; van Zijl, G. 3D concrete printer parameter optimisation for high rate digital construction avoiding plastic collapse. Compos. B Eng. 2020, 183, 107660. [Google Scholar] [CrossRef]
- Martynenko, A. Computer Vision for Real-Time Control in Drying. Food Eng. Rev. 2017, 9, 91–111. [Google Scholar] [CrossRef]
- Kazemian, A.; Yuan, X.; Davtalab, O.; Khoshnevis, B. Computer vision for real-time extrusion quality monitoring and control in robotic construction. Autom. Constr. 2019, 101, 92–98. [Google Scholar] [CrossRef]
- Ma, G.; Li, Y.; Wang, L.; Zhang, J.; Li, Z. Real-time quantification of fresh and hardened mechanical property for 3D printing material by intellectualization with piezoelectric transducers. Constr. Build. Mater. 2020, 241, 117982. [Google Scholar] [CrossRef]
- Barjuei, E.S.; Courteille, E.; Rangeard, D.; Marie, F.; Perrot, A. Real-time vision-based control of industrial manipulators for layer-width setting in concrete 3D printing applications. Adv. Ind. Manuf. Eng. 2022, 5, 100094. [Google Scholar] [CrossRef]
- Zhang, C.; Yan, Q.; Panda, G.P.; Wu, W.; Song, G.; Vipulanandan, C. Real-time monitoring stiffness degradation of hardened cement paste under uniaxial compression loading through piezoceramic-based electromechanical impedance method. Constr. Build. Mater. 2020, 256, 119395. [Google Scholar] [CrossRef]
- Kocherla, A.; Kamakshi, T.A.; Subramaniam, K.V.L. In situ embedded PZT sensor for monitoring 3D concrete printing: Application in alkali-activated fly ash-slag geopolymers. Smart Mater. Struct. 2021, 30, 125024. [Google Scholar] [CrossRef]
- Vlachakis, C.; Mcalorum, J.; Perry, M. 3D printed cement-based repairs and strain sensors. Autom. Constr. 2022, 137, 104202. [Google Scholar] [CrossRef]
- Ren, H.; Yang, X.; Wang, Z.; Xu, X.; Wang, R.; Ge, Q.; Xiong, Y. Smart structures with embedded flexible sensors fabricated by fused deposition modeling-based multimaterial 3D printing. Int. J. Smart Nano Mater. 2022, 13, 447–464. [Google Scholar] [CrossRef]
- Ma, G.; Buswell, R.; da Silva, W.R.L.; Wang, L.; Xu, J.; Jones, S.Z. Technology readiness: A global snapshot of 3D concrete printing and the frontiers for development. Cem. Concr. Res. 2022, 156, 106774. [Google Scholar] [CrossRef]
- Ai, D.; Zhu, H.; Luo, H.; Wang, C. Mechanical impedance based embedded piezoelectric transducer for reinforced concrete structural impact damage detection: A comparative study. Constr. Build. Mater. 2018, 165, 472–483. [Google Scholar] [CrossRef]
- Liu, P.; Wang, W.; Chen, Y.; Feng, X.; Miao, L. Concrete damage diagnosis using electromechanical impedance technique. Constr. Build. Mater. 2017, 136, 450–455. [Google Scholar] [CrossRef]
- Huo, L.; Chen, D.; Liang, Y.; Li, H.; Feng, X.; Song, G. Impedance based bolt pre-load monitoring using piezoceramic smart washer. Smart Mater. Struct. 2017, 26, 057004. [Google Scholar] [CrossRef]
- Ai, D.; Zhu, H.; Luo, H.; Yang, J. An effective electromechanical impedance technique for steel structural health monitoring. Constr. Build. Mater. 2014, 73, 97–104. [Google Scholar] [CrossRef]
- Gayakwad, H.; Thiyagarajan, J.S. Structural Damage Detection through EMI and Wave Propagation Techniques Using Embedded PZT Smart Sensing Units. Sensors 2022, 22, 2296. [Google Scholar] [CrossRef]
- Moelich, G.M.; Kruger, P.J.; Combrinck, R. A plastic shrinkage cracking risk model for 3D printed concrete exposed to different environments. Cem. Concr. Compos. 2022, 130, 104516. [Google Scholar] [CrossRef]
- Qi, C.; Weiss, J.; Olek, J. Characterization of plastic shrinkage cracking in fiber reinforced concrete using image analysis and a modified Weibull function. Mater. Struct. 2003, 36, 386–395. [Google Scholar] [CrossRef]
- Negi, P.; Chakraborty, T.; Kaur, N.; Bhalla, S. Investigations on effectiveness of embedded PZT patches at varying orientations for monitoring concrete hydration using EMI technique. Constr. Build. Mater. 2018, 169, 489–498. [Google Scholar] [CrossRef]
- Cai, J.; Peng, Z.; Zhao, R.; Xu, A.; Zhou, X. The Influence of Slag/Fly Ash Ratio and Sodium Silicate Modulus on the Properties of 1-3-2 Alkali-Based Piezoelectric Composite. Materials 2022, 15, 1150. [Google Scholar] [CrossRef]
- Shin, S.W.; Qureshi, A.R.; Lee, J.Y.; Yun, C.B. Piezoelectric sensor based nondestructive active monitoring of strength gain in concrete. Smart Mater. Struct. 2008, 17, 055002. [Google Scholar] [CrossRef]
- Murata. Piezoelectric Sound Components. Available online: https://www.farnell.com/datasheets/9058.pdf (accessed on 30 July 2022).
- C78/C78M Standard Test Method for Flexural Strength of Concrete (Using Simple Beam with Third-Point Loading). Available online: https://www.astm.org/c0078_c0078m-18.html (accessed on 24 August 2023).
- Cooney, T.G.; Francis, L.F. Processing of sol-gel derived PZT coatings on non-planar substrates. J. Micromechanics Microengineering 1996, 6, 291–300. [Google Scholar] [CrossRef]
- Su, Y.-F.; Han, G.; Kong, Z.; Nantung, T.; Lu, N. Embeddable Piezoelectric Sensors for Strength Gain Monitoring of Cementitious Materials: The Influence of Coating Materials. Eng. Sci. 2020, 11, 66–75. [Google Scholar] [CrossRef]
- Xi, X.; Chung, D.D.L. Effect of nickel coating on the stress-dependent electric permittivity, piezoelectricity and piezoresistivity of carbon fiber, with relevance to stress self-sensing. Carbon 2019, 145, 401–410. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Sample | Total Thickness (PZT and Coating Layers) | Name | |
|---|---|---|---|
| Nail Polish | 1 Layer | 0.9 mm | 1LNP |
| 2 Layers | 1.0 mm | 2LNP | |
| 4 Layers | 1.2 mm | 4LNP | |
| Epoxy resin | 1 Layer | 2.5 mm | 1LRE |
| 2 Layers | 3.4 mm | 2LRE | |
| 4 Layers | 5.7 mm | 4LRE | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quah, T.K.N.; Vo, T.V.K.; Tay, Y.W.D.; Tan, M.J.; Wong, T.N.; Li, K.H.H. Real Time Assessment of Smart Concrete Inspection with Piezoelectric Sensors. Electronics 2023, 12, 3762. https://doi.org/10.3390/electronics12183762
Quah TKN, Vo TVK, Tay YWD, Tan MJ, Wong TN, Li KHH. Real Time Assessment of Smart Concrete Inspection with Piezoelectric Sensors. Electronics. 2023; 12(18):3762. https://doi.org/10.3390/electronics12183762
Chicago/Turabian StyleQuah, Tan Kai Noel, Tran Vy Khanh Vo, Yi Wei Daniel Tay, Ming Jen Tan, Teck Neng Wong, and King Ho Holden Li. 2023. "Real Time Assessment of Smart Concrete Inspection with Piezoelectric Sensors" Electronics 12, no. 18: 3762. https://doi.org/10.3390/electronics12183762