1. Introduction
Global air traffic is expected to grow annually at a rate of 4.1% [
1], and global advanced air mobility of automated aircraft at lower altitudes is expected to grow at a compounded annual growth rate of 22.45% [
2]. Unmanned Aerial Vehicles (UAVs) would be an integral part of this future air traffic, used for surveillance, military, transportation, cargo, and many more applications. Thus, given the inevitability of potential collisions among aircraft, Collision Avoidance (CA) algorithms are vital for all UAVs, including fixed-wing UAVs. Fixed-wing UAVs carry many advantages over rotary-wing UAVs like greater speed and endurance, higher payload capacity for the same endurance, lower maintenance, lower noise levels, etc., which could be essential for many emergency, reconnaissance, and cargo missions. However, the formulation of CA algorithms is challenging for fixed-wing UAVs. Unlike rotary-wing UAVs, fixed-wing UAVs cannot hover, or even slow down below critical stall speeds during potential collision scenarios. Hovering is also a non-optimal solution for CA as it increases mission time and is innately fuel-inefficient. Thus, this work proposes a decentralized Fuzzy Inference System (FIS)-based resolution algorithm that modulates the point-to-point mission path while ensuring the continuous motion of UAVs during CA. This algorithm, ensuring continuous motion, could likewise provide an efficient solution for CA in rotary-wing UAVs, eliminating the need for hover-based solutions in numerous potential collision scenarios.
Aircraft CA System (ACAS) II is the most common method of CA in crewed aircraft. It is implemented as Traffic CAS (TCAS) II, which provides traffic advisory for warning and resolution advisory for appropriate CA maneuvers to the pilots [
3]. However, TCAS II has several limitations, encompassing the provision of resolutions exclusively within the vertical plane like climb, descent, or level flight, and these resolutions are designed for specific encounter geometries; furthermore, TCAS II operates deterministically [
4]. The review and analysis of TCAS in [
5] also state that expanding the horizontal resolution algorithm will offer superior collision detection and resolution performance. Similarly, the newly proposed method of ACAS X and its variation ACAS Xu for unmanned aircraft encourage the design of resolutions in both vertical and horizontal directions using probabilistic models [
6,
7]. Therefore, this study proposes to generate resolutions in both vertical and horizontal directions.
A vast number of research studies and algorithms have been proposed for the CA of aircraft, widely classified by Kuchar et al. [
8] as prescribed, optimized, force field, or manual. With the advancement of navigation and control technologies for UAVs, CA algorithms can be further classified into various domains, including path planning, conflict resolution, potential function, geometric guidance, and motion planning [
9,
10]. However, it is essential to note that many of these approaches primarily cater to rotary-wing UAVs capable of stopping and hovering, rendering them less suitable for fixed-wing UAVs. For fixed-wing aircraft, a range of geometric approaches, such as forming circular arcs or Three-Dimensional (3D) trajectories [
11,
12,
13], velocity modulation in the horizontal plane [
14], velocity obstacle concepts [
15,
16,
17,
18], differential geometry concepts [
19], and the use of collision cones [
20,
21], have been proposed. While these methods provide some applicability to fixed-wing aircraft, they may suffer from limitations such as high computational demands and a lack of intuitive understanding. Furthermore, some concepts involve potential/force fields modified or reformulated with UAV’s physical constraints for better real-life performance [
22,
23,
24], or enhanced and optimized using evolutionary methods to avoid local minima problems [
22,
25,
26]. Unfortunately, many force field methods, like the optimized path planning-based approach of the 3D vector field histogram [
27] are predominantly suited for rotary-wing UAVs and may not translate well to fixed-wing UAV scenarios. While path planning-based methods offer high accuracy, some of them, like combining differential game problems with tree-based path planning [
28], utilizing reinforcement learning for UAV guidance [
29], optimizing flight trajectory with a bank-turn mechanism [
30], employing the Radau-pseudospectral approach [
31], applying probabilistic methods in collision detection [
32], or generating an automated distributed policy for multi-robot motion planning [
33], may face significant computational challenges when implemented in real time for small UAVs. Analytical formulations such as the speed approach [
34] and the use of buffered Voronoi Cells for path planning [
35], though computationally efficient, may lack intuitive understanding and require specialized expertise to implement effectively.
Humans, on the other hand, are innately capable of avoiding collision intuitively [
36,
37]. So, in recent times, fuzzy logic that emulates the human way of decision making with the linguistic characterization of numerical variables has been gaining popularity in devising CA algorithms in UAVs. This research also uses an FIS to avoid computational complexity while also providing an intuitive understanding of the approach. Just like pilots who perform CA maneuvers manually based on their visual perception and flight instrument information about incoming static or dynamic obstacles, the proposed algorithm also takes into account the sensor readings for incoming intruders to modulate the current path and avoid collisions. Previously, fuzzy logic for CA was predominantly researched in surface vehicles [
38,
39,
40,
41]. Now, research on the use of fuzzy logic for CA in UAVs is also gaining traction. For instance, a fuzzy-based aircraft CA system capable of generating an alert of a potential midair collision while taking control if no preventive action is taken within a specified time was proposed by Younas et al. [
42]. Choi et al. [
43] used an FIS to improve the performance of their enhanced potential field-based CA. Likewise, several basic avoidance methods have been devised to avoid collision using fuzzy logics [
44,
45,
46]. However, most of them are suitable for rotary-wing UAVs. Cook et al. [
47] used a fuzzy logic-based approach to help mitigate the risk of collisions among aircraft, including fixed-wing and quadcopter, using separation assurance and CA techniques.
Although similar to the CA logic of [
47], which directly generates low-level control input like turn rate using intuitively defined FISs, this work proposes a 3D Collision Avoidance Fuzzy Inference System (3D-CAFIS) to modulate the path variables—heading, velocity, and altitude of the UAVs. Thus, the UAV performs both horizontal and vertical maneuvers. The modulation is based on the relative states of the UAV in consideration, the own-ship, with respect to the nearest intruder or obstacle point. Moreover, a Genetic Algorithm (GA) was used to optimize the FISs such that the distance traveled during the mission is minimal despite path modulation while ensuring separation during CA is above the appropriate threshold. FIS optimization was conducted using a training scenario of three basic pairwise conflicts. The algorithm’s validity can be confirmed using formal methods, which will be similar to that outlined in [
47], as the basic approach of defining the FISs for this study was similar. However, due to the complexity of the algorithm with many variables, the effectiveness of the algorithm is evaluated through multiple simulations of randomly generated UAV missions within a closed functional space.
The paper begins by introducing the system architecture and the UAV model utilized in this study in
Section 2. Next,
Section 3 provides a step-by-step explanation of the proposed algorithm.
Section 4 presents the findings from our simulation studies. Lastly,
Section 5 offers a summary of this work and addresses future works.
2. System Modeling
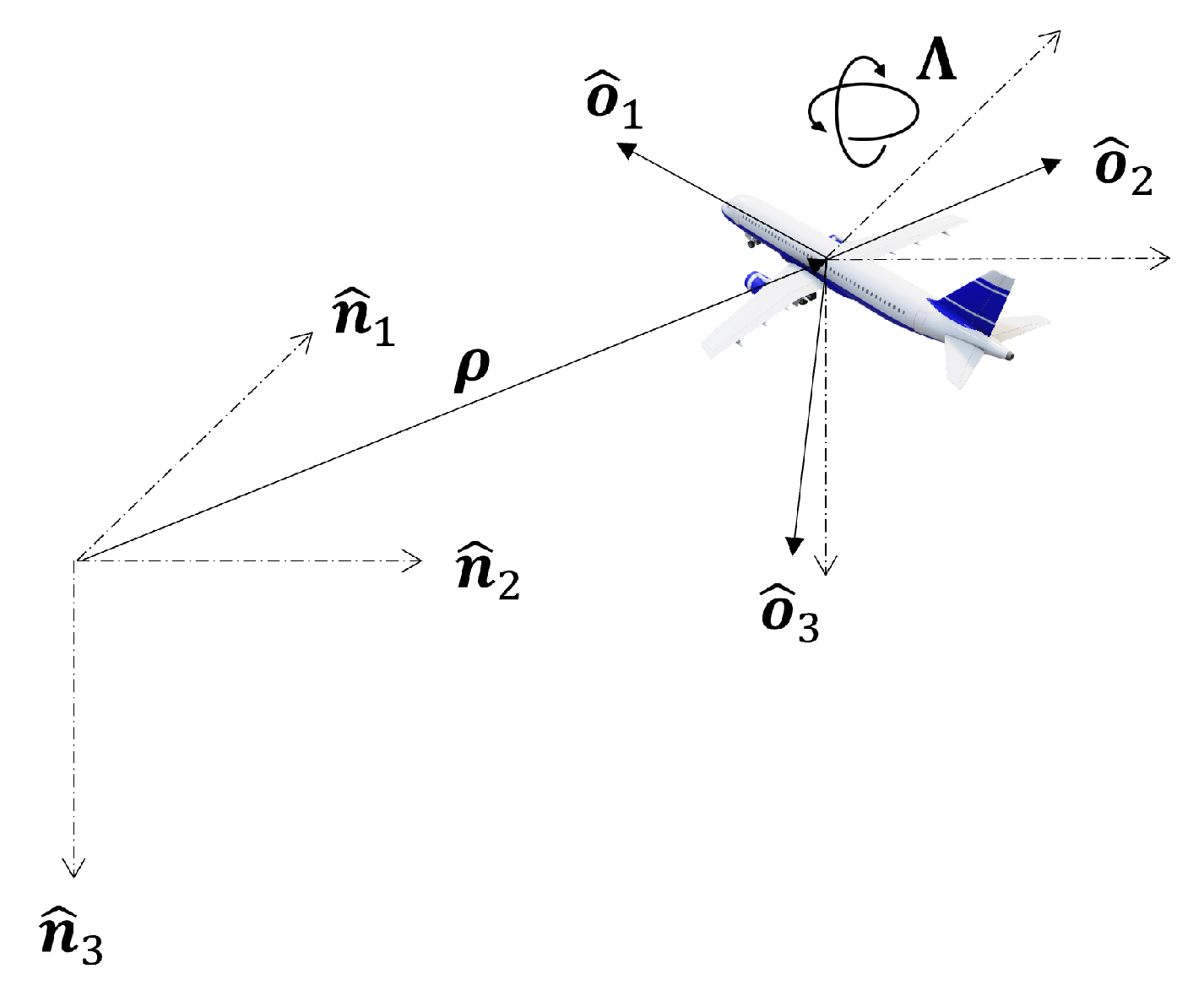
UAVs operate in the
N-frame. Hereafter, ‘own-ship’ refers to the UAV currently executing the CA algorithm, while ‘intruders’ denote other UAVs in the airspace. The own-ship’s body frame is designated as the
O-frame and the intruder’s as the
I-frame. A UAV’s position in the
N-frame is defined by
, and its attitude is represented by the 3-2-1 set of Euler angles (
), as shown in
Figure 1. For simplicity, one omits the
N-frame expression.
Furthermore, the state of a fixed-wing UAV can be comprehensively defined with parameters including airspeed (
), ground speed (
), wind velocity (
),
,
,
, and
, as shown in
Figure 2.
The UAV’s attitude can also be represented in the G-frame, obtained using the 3-2-1 set of Euler angles (). Consequently, the UAV state space vector considered is . Note that is the norm of .
A basic system architecture for the waypoint control and CA of a UAV is depicted in
Figure 3.
In summary, the significance of each block is explained below:
Waypoint Follower (
Section 3.1) determines the desired path along with the desired change variables based on set waypoints.
Collision Detection (CD) (
Section 3.2) checks whether the own-ship is on a collision course with an intruder using range-bearing sensors and modified TCAS logic.
3D-CAFIS (
Section 3.3) generates modulation parameters based on relative states obtained from CD using the proposed FIS tree. These parameters modulate the desired path obtained from the waypoint follower, thus avoiding potential collisions.
Controller (
Section 3.4) calculates control commands based on the path, either from the waypoint follower or, if CA is initiated, from the 3D-CAFIS, to control the UAV.
UAV Plant represents the kinematic mathematical model of a fixed-wing UAV that simulates UAV motion.
Sensors consist of a global positioning system and an inertial measurement unit for determining the position, velocity, and angular velocity of the own-ship, along with a range-bearing sensor that measures the relative position of intruders in airspace.
State Estimator utilizes filtering techniques to estimate the position and attitude of the UAV. This is not within the scope of this research.
Here, UAVs are controlled via a proportional-derivative control of
,
, and
. The subsequent kinematic guidance model for the UAV is given by [
48]
where
is the ground speed vector in the
G-frame, while
,
,
, and
are gain values tuned to achieve smoother flight maneuvers. Note that under wind-less conditions,
,
, and
. For simplicity, UAVs are assumed to be in a coordinated-turn condition with zero side-slip and zero angles of attack. The relationship between the course angle and bank angle is expressed in Equation (
4). Also,
,
, and
serve as the command variables for controlling the UAV.












 ), commanded states (
), commanded states ( ), and waypoint position (
), and waypoint position ( ).
).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}