1. Introduction
Power transformers are some of the most crucial apparatuses in power systems, which are used to transfer electrical energy through electromagnetic induction [
1,
2,
3]. They are vulnerable to mechanical changes during their lifetimes, which typically manifest as winding deformation, such as shorted or open turns, axial displacement, conductor tilting, radial displacement, and so on [
4,
5]. Among the major problems, a potential short-circuit (SC) fault between winding turns or discs can cause great harm to the stable operation of the transformer [
6]. It continually decreases longitudinal insulation between adjacent turns and finally leads to catastrophic damage to the transformer. Therefore, the development of a precise diagnostic method for SC faults is one of the most important aspects of transformer condition monitoring.
Frequency response analysis (FRA), short-circuit impedance (SCI), and sweep frequency impedance (SFI) have been widely used to detect SC faults of transformer windings [
7,
8,
9,
10]. Compared to the first two, SFI has a greater signal-to-noise ratio, better repeatability, and more affluent information related to winding mechanical conditions [
9,
11]. This method relies on the variation of the SFI signature to judge whether or not mechanical changes occur on a transformer winding [
9]. Hence, to detect an SC fault within a transformer accurately, it is significant to understand the corresponding SFI signatures of SC faults with different levels and at different positions of a transformer winding. At present, SFI signatures of winding deformation are mainly studied using an experimental method, in which winding deformation is simulated by manufacturing mechanical faults on windings artificially [
9,
12]. However, the method is time-consuming and high-cost, as well as difficult to apply in a large-scale power transformer.
To solve the abovementioned problem, the majority of these studies have been performed via simulation analysis based on FEM [
13], mathematical modelling [
14], and equivalent electric circuit models. The latter can be further divided into ladder network equivalent models [
3,
7], multiconductor transmission line models [
15], and hybrid models [
16]. Among these models, a combination of FEM modelling and ladder network modelling with lumped parameters has been widely used in simulation studies of winding deformation [
5,
13,
17,
18,
19,
20,
21,
22]. Although establishing a detailed lumped-parameter circuit model is essential to extract the accurate response features of deformed windings, most of the abovementioned studies, such as [
13,
17,
18,
19,
20], did not consider the influences of frequency-dependent complex anisotropic permeabilities (FDCAPs), caused by the physical characteristics (e.g., skin, proximity, and geometrical effects and anisotropic properties) of the core and winding materials, on the lumped parameters of winding equivalent circuits. These result in an inaccurate trend of the obtained curve signature that can emulate the practical signature of a real transformer. Differently, in [
5,
21,
22], the aforementioned influencing factors had been introduced in the calculation of circuit lumped parameters, but the established FEM model calculating the parameters was not the three-phase transformer used widely in a power grid. Moreover, considering different connection modes and theories of FRA and SFI measurements [
9], the circuit models based on FRA measurement in [
5,
13,
17,
18,
19,
20,
21,
22] are also not suitable for SFI studies. Therefore, it is extremely crucial to establish a circuit model relating to the integral winding structure of the three-phase transformer and the FDCAPs of SFI measurements for accurate studies on the SFI features of SC faults.
In this paper, a broadband circuit model based on the SFI test principle, transformer winding parameters, and a double-ladder network (DLN) is proposed to investigate the SFI signatures of SC faults. The winding parameters were calculated using a FEM model, considering the FDCAPs of the core and winding materials, of a three-phase transformer. Experiments were carried out on an equivalent transformer hardware model with continuous windings specially made for this research. The correctness of the proposed model was verified by comparing its SFI signature with those of a simulation model without considering FDCAPs, and the hardware model. In addition, through experimental measurements and simulation analyses, it was proved that using the model to obtain the SFI features of SC faults is feasible, and the SFI features of different types of SC faults were studied and summarized. Considering that SFI is a comparative method using graphical inspection or statistical indicators, the modelling method proposed in this paper can assist in facilitating the objective and quantitative interpretation of transformer SFI results and provide a new way to crack the challenge of studying transformer inner winding deformation.
In summary, the contributions of this paper are listed as follows:
Calculating the frequency-dependent lumped inductance and resistance by using the FEM model, considering the FDCAPs of core and winding materials, of the three-phase transformer to improve the accuracy of simulation;
A circuit model and its state equations are proposed to simulate SFI measurements for studies on the SFI signatures of winding SC faults, which could offer a new practicable idea for SFI method interpretation;
The SFI data obtained from the proposed modelling method are compared with those of other methods (e.g., experimental measurements, and a modelling method, without considering FDCAPs) to show its effectiveness and superiority;
Providing the SFI characteristics of SC faults at different levels and different positions, especially the fault occurring on a non-tested winding, by a comparison of the experiment and simulation to set a foundation for the detection of SC faults.
The rest of this paper is organized as follows:
Section 2 introduces the investigated transformer and the SFI measurement procedure. The FEM modelling and winding parameters are presented in
Section 3.
Section 4 introduces the proposed modelling method of SFI. The results of the simulation and experiment are presented in
Section 5.
Section 6 presents the conclusions of this paper.
3. FEM Modelling of Winding Parameters
Figure 1 and
Figure 2 show that a detailed SFI simulation circuit model should include capacitive, inductive, conductive, and resistive parameters to reflect the measurement connection and winding mechanical state. The circuit parameters, reflecting the winding mechanical state, are generally calculated using mathematical analysis and FEM modelling, but the latter is more suitable for extracting the circuit parameters of a transformer with a complex structure. Therefore, FEM modelling was applied to calculate the circuit parameters of the transformer in
Figure 1.
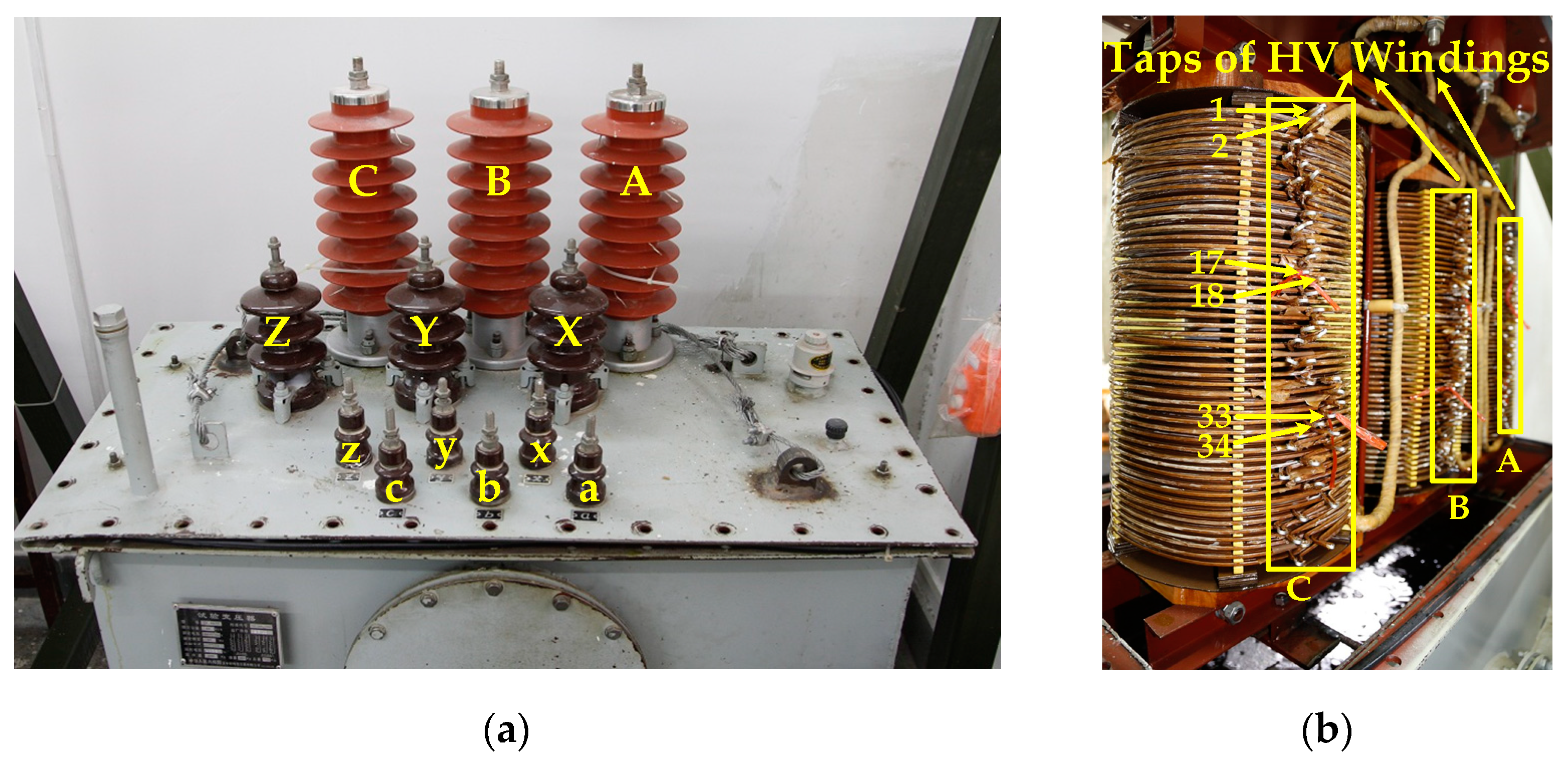
Based on the specifications of the investigated transformer in
Table 1, the FEM model (see
Figure 3) of the transformer was established to calculate the parameters of the C-phase windings, which include the inductance, capacitance, resistance, and conductance of each winding disc. The FEM model was composed of a transformer tank, three-phase HV and LV windings, a laminated magnetic iron core, and insulating oil.
Considering the computational accuracy and time of the model comprehensively, both the phase A and B windings were simplified as hollow cylinders, though not the phase C windings, and the total FEM model could be set as one-half of the transformer on account of its symmetrical structure. Therefore, the parameters obtained from the FEM model needed to be multiplied by two when they were applied in the circuit model.
In this paper, to extract the SFI feature of a transformer winding accurately, the inductances and resistances, calculated using the FEM model, needed to consider FDCAPs. However, the skin effect at high frequencies could lead to a longer simulation time due to increased meshing elements. To solve the problem, the FEM model in the magnetostatic mode was used to replace that in the frequency-domain mode. The detailed calculation procedures of the winding parameters are written as follows.
3.1. Inductance and Resistance
The computational domains of the FEM model in
Figure 3, namely,
Ω1,
Ω2,
Ω3, and
Ω4, represent the volumes of the HV windings, LV windings, insulation oil, and core, respectively. The suitable boundary conditions are applied as zero normal components of magnetic-field intensity (
n·
Ĥ = 0, where
n denotes the surface normal and
Ĥ is the magnetic-field intensities through the surface) on the outer external boundaries and a zero tangential component of the magnetic field (
n ×
Ĥ = 0) on the tangent plane. The permeabilities of
Ω1,
Ω2,
Ω3, and
Ω4 are, respectively,
,
,
, and
, which can be obtained via FEM modelling and mathematical analysis, as shown in
Figure 4. Additionally, the above symbols ^ and ↔ are used to represent complex quantities and tensors, respectively.
The calculation procedure for the permeabilities is described as follows:
The permeabilities of HV and LV windings are primarily affected by skin, geometrical, and proximity effects and the anisotropy of conductors, so a 2-D axisymmetric FEM model is implemented using an eddy current solver to obtain the FDCAPs (
and
) of the conductors on the computational domains
Ω1 and
Ω2 [
22];
Since the insulation oil is a nonmagnetic material, the permeability, , of domain Ω3 is always equal to the vacuum permeability at different frequencies;
Considering the skin effect and anisotropy of the silicon steel sheet, the effective FDCAP,
, of
Ω4 in
Figure 4 is divided into X, Y, and Z directions, and they can be expressed as [
21]:
and
where
δx and
δy are, respectively, the skin depths in the X and Y directions;
ω is the angular frequency;
μ0 is the vacuum permeability;
σ is the conductivity of the silicon steel sheet; and
kfe is the stacking factor of the core, which can be derived by
kfe = 2
b/
h (
h and 2
b are the mean thicknesses of a single lamination of the core with and without an insulation layer, respectively). In [
23], it is indicated that the magnetic permeability of the paramagnetic direction is about two times more than that of the non-paramagnetic direction in the anisotropic silicon steel sheet. Therefore, the relative permeability relationship of the silicon steel sheet in the X, Y, and Z directions can be written as
μy =
μz =
μx/2. The following parameters are used in the computation of the core permeability:
μx = 5.5 × 10
3,
μy =
μz =
μx/2 = 2.75 × 10
3,
σ = 6 × 10
7 S/m,
b = 3 × 10
–4 m, and
h = 6.5 × 10
–4 m.
After assigning the abovementioned frequency-dependent permeabilities of the different computational domains in the 3-D FEM transformer model, an external alternating current,
Î, is injected into the
ith disc of the winding. Then, the transformer model with the healthy windings is divided into 344,918 mesh elements, as illustrated in
Figure 5a, and its parameters of the magnetic field with permeabilities of different frequencies are solved using a magnetostatic solver.
Figure 5b,c illustrate the simulation results of magnetic fluxes at 50 Hz and 1 MHz, respectively, in which the arrows and color shades indicate the distribution and magnitude of magnetic fluxes. From the figures, the magnetic fluxes at 50 Hz converge in the core, and at 1 MHz they are mainly located in the insulating material. Since the inductances and resistances in the circuit model are derived from the magnetic fluxes of the transformer, the impacts of the FDCAPs, caused by the skin, proximity, and geometrical effects and anisotropic properties, of the transformer core and winding on inductances and resistances at different frequencies are very obvious. This indicates that the FDCAPs cannot be ignored in establishing an accurate SFI measurement model.
Based on the induced voltages calculated in the FEM model at different frequencies, the frequency-dependent self-inductance,
Lii, and self-resistance,
Rii, of the
ith winding disc could be extracted, which are defined as:
and the frequency-dependent mutual inductance,
Mij, and mutual resistance,
Rij, between the
ith and
jth discs can be derived by:
where
and
are, respectively, the induced voltages in the
ith and
jth winding discs. They can be calculated using (10):
Here,
and
and
and
are, respectively, the magnetic vector potentials and the unit vectors in the azimuthal direction of the
ith and
jth discs; and
Ni and
Nj,
Sci and
Scj, and
Ωi and
Ωj are the turn numbers, total cross-sectional areas, and computational domains of the two winding discs, respectively [
22].
As the order of the inductance and resistance matrices is huge, just some frequency-dependent inductances and resistances of the first disc on the HV winding of phase C are plotted in
Figure 6. From the figures, as the frequency increases, the inductances and resistances of the first winding disc show decreasing and increasing trends, respectively. From 10 Hz to 1 MHz, the ratio between the maximum and the minimum of the inductance is 400, and that of the resistance can reach as high as 2000.
Summarily, to study SFI signatures of winding deformation through simulation analysis accurately, the FDCAPs should be considered in the calculation of the inductances and resistances.
3.2. Capacitance and Conductance
The capacitances and conductances of the transformer FEM model can be calculated using the net charge,
Q, in the electrostatic field mode. The transformer model in
Figure 3 can be regarded as a system with n electrodes (i.e., transformer winding discs) and one grounding (including the tank and the core), and its insulating material permittivity is set as that of free space. Therefore, the charge matrix,
Q, of the winding discs in the transformer model can be derived as:
where
Qi is the charge quantity in the
ith disc winding,
stands for the Maxwell capacitance between the
ith disc and the
jth disc, and
Ui represents the voltage of the
ith disc.
When the voltages of the tank and core are both ground potential, and the voltages of the first disc of the phase C HV winding and the other windings are 1 V and 0 V, respectively, the capacitances (e.g.,
, …,
) related to the first disc could be given by (11). Similarly, the capacitances of the other discs could also be calculated.
Figure 7 shows an example of the simulation results, which illustrates the electrical potential distribution and the setting of the FEM model in the calculation of the capacitances and conductances for the first disc.
However, the Maxwell capacitance matrix,
Cg, calculated in (11) cannot be directly implemented in the circuit, which should be transformed into the lumped capacitance matrix,
Cd, as follows [
17]:
The capacitance matrix,
C, and conductance matrix,
G, used in the circuit model can be derived as:
where
and
are the real and imaginary parts of the relative permittivity of the insulating material, respectively. Considering that the insulating oil accounts for about 100% of the total transformer insulation materials, the relative complex permittivity of the insulating oil is taken as that of the whole insulating material in the transformer, which can be written as [
18]:
where
ε0 is the permittivity of free space,
σin is the conductivity of the insulation oil, and its value is 2.05 × 10
–12 S/m. Similar to the inductance and resistance matrices, the order of the capacitance and conductance matrices of the FEM model is also very big, so
Table 2 just lists the ground capacitances and conductances of the upper three discs for the phase C HV winding and their mutual capacitances and conductances with adjacent discs (see
Figure 3).
4. Modelling of SFI Measurements
DLN is widely used to study the high-frequency characteristics of a two-winding transformer [
3,
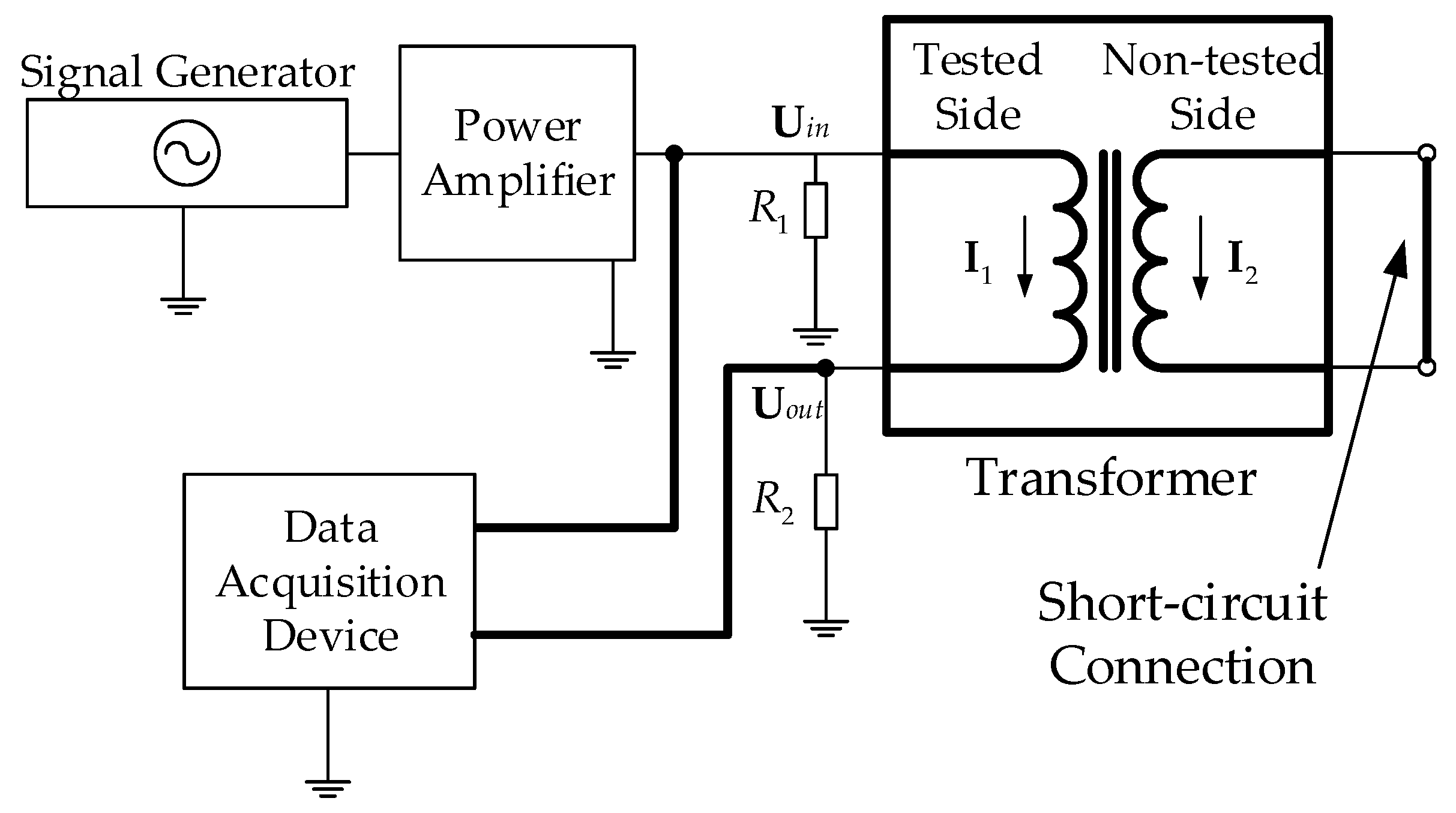
13]. In this paper, based on the connection mode of the SFI measurements (see
Figure 2), winding parameters were calculated using the FEM model and DLN, and a circuit model is proposed to simulate an SC fault of a transformer winding, as shown in
Figure 8. In addition, the DLN sections from 1 to
n represent the different winding discs in
Figure 3, and
R3, connected between the (
m + 1)th and
nth nodes, stands for the resistance of the wire short-circuited the head and the end of the non-tested winding in
Figure 2. As shown in
Figure 8, in the SFI simulation of the HV winding, the numbers of tested nodes (1 to
m) and non-tested nodes (
m + 1 to
n) are 49 and 52, respectively, which are equal to the number of HV and LV winding discs in
Table 1. The specific circuit parameters in
Figure 8 are defined as follows:
| Cii, Gii | Ground capacitance and ground conductance of the ith (1 ≤ i ≤ n) winding disc; |
| Cij, Gij | Capacitance and conductance between the ith and jth (j ≠ i and 1 ≤ j ≤ n) discs; |
| Lii, Rii | Self-inductance and self-resistance of the ith disc; |
| Mij, Rij | Mutual inductance and mutual resistance between the disc i and j; |
| R0, L0 | Resistance and inductance of the measurement line; |
| R1, R2 | Sampling resistances of the signals, Uin and Uout; |
| R3 | Resistance of the short-circuit wire. |
The state vectors of the circuit model in
Figure 8 consist of nodal voltages and inductor currents. Voltage and current equations can be written as follows:
and
where
L,
R,
C, and
G represent the matrices of the inductance, resistance, capacitance, and conductance, respectively, and
and
(the dots on top of the symbols represent the derivatives of the state variables at the time) are, respectively, the time derivatives of the nodal voltage and inductor current matrices
U and
I. The matrix,
Γ, consisting of 0, 1, and −1, is used to represent the connection mode between the current and voltage equations. Once the
kth node is loaded with a voltage signal,
Uk, the Equations (15) and (16) can be transformed as:
and
Here, C′ and G′ are obtained by removing the kth column and row from C and G, respectively. The matrices QC and QG contain the kth column of C and G without the kth row, respectively, and Γ′ is obtained by removing the kth column of Γ, while P contains the column with index k of matrix Γ.
When the signal
Uk is a sinusoidal voltage, by using Laplace transformation, the Equations (17) and (18) are transformed into the frequency domain in the following way:
and
where j is the imaginary unit and
ω is the angular frequency. By rearranging the terms in (19) and (20), the state-space model of the circuit in
Figure 8 can be obtained:
where
Here, Y, Yu, and Z, respectively, stand for the matrices of the admittance and impedance in the circuit model, which are expressed as Y = jωC′ + G′, Yu= jωQC+ QG, and Z = jωL + R.
Corresponding to the SFI measurement in
Figure 2, in the SFI simulation, the external voltage source,
Uin(j
ω), is connected to the 0th node in
Figure 8. Based on (1) and (21), the simulated SFI signature,
Z(j
ω), of a transformer winding can be numerically obtained from:
where
U0 and
Um represent the voltages of the 0th and
mth nodes, respectively, and
Im is the current of the
nth branch.
In conclusion, the general process of modelling SFI measurements, the parameter calculations, and the following correctness validation procedures used in this paper are illustrated in
Figure 9.
6. Conclusions
In this paper, a broadband model considering FDCAPs is proposed to study the impacts of SC faults on an SFI signature of a transformer winding. Furthermore, the accuracy of the proposed model was assessed by comparing its signature with those of other models, such as the simulation model without FDCAPs and the physical transformer model. The main conclusions are listed as follows:
The simulation results from the model considering FDCAPs are in more agreement with experimental measurements than those of the model that did not consider FDCAPs, and the impacts of the same SC fault on the SFI curves obtained from the simulation considering FDCAPs and measurements were almost the same, which verifies that the proposed modelling approach can be effectively used to study the SFI features of SC faults.
The SC fault could lead to a reduction in the SFI value at 50 Hz and a right shift of the SFI signature from 10 Hz to 700 kHz. As the level of the SC fault increased, the abovementioned trend was more significant.
Unlike the SC fault in the top section of the winding, the SC faults occurring in the middle and bottom sections of the winding also resulted in high amplitudes of resonance peaks on SFI curves above 50 kHz. Meanwhile, the impact of the SC fault, occurring in the middle winding, on the SFI signature was more obvious.
The SC fault of the non-tested winding could result in a slight left shift of the SFI curve within the tested winding at the high frequencies, but the change was too small to cause a misjudgment of the mechanical condition of the tested winding, which could be ignored in an onsite measurement.
In a word, the proposed model of a power transformer can be used to study the SFI features of SC faults accurately; meanwhile, the concluded SFI features of SC faults in this study contribute to the detection of an SC fault in a transformer winding. Moreover, it is expected that this paper may offer a new practicable idea for investigating the impacts of winding deformation on the SFI signature of a power transformer.

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}