
Energy Efficiency of Connected Autonomous Vehicles: A Review

Abstract
:1. Introduction
1.1. Motivation
1.2. Methodology
1.3. Objective and Contribution
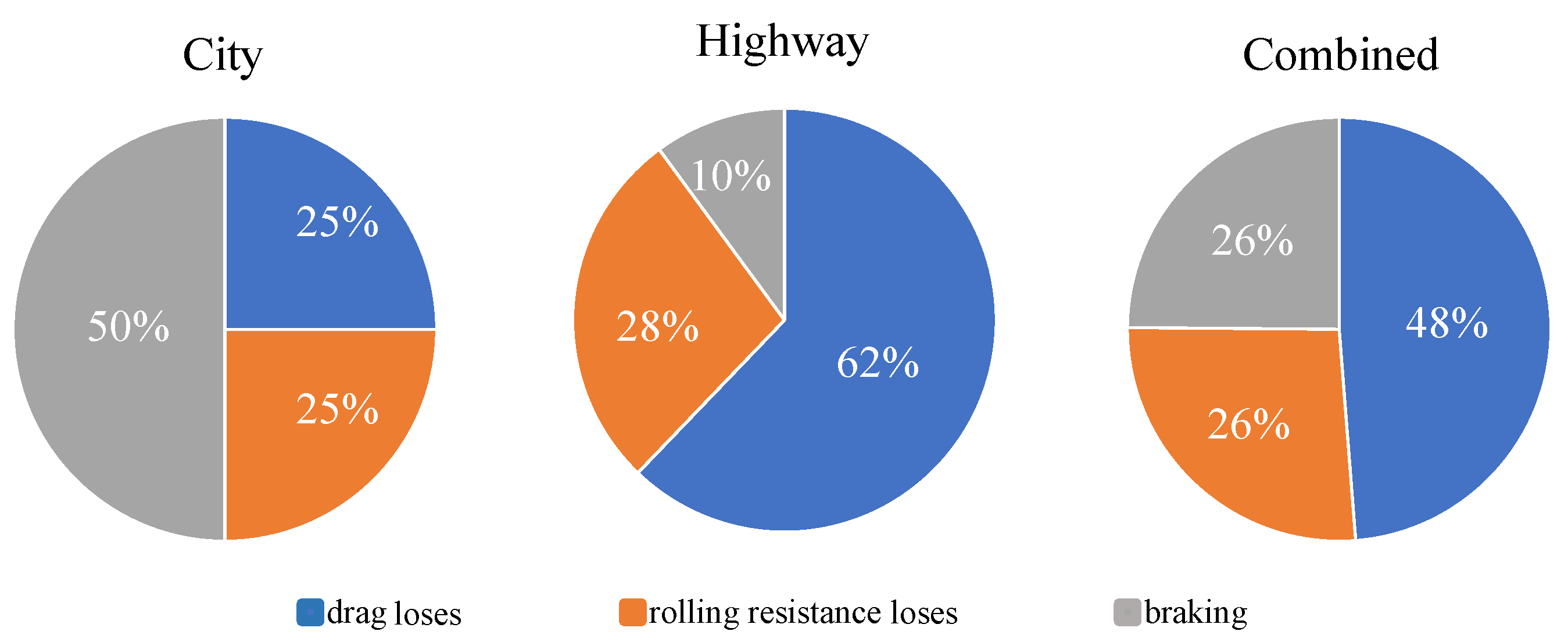
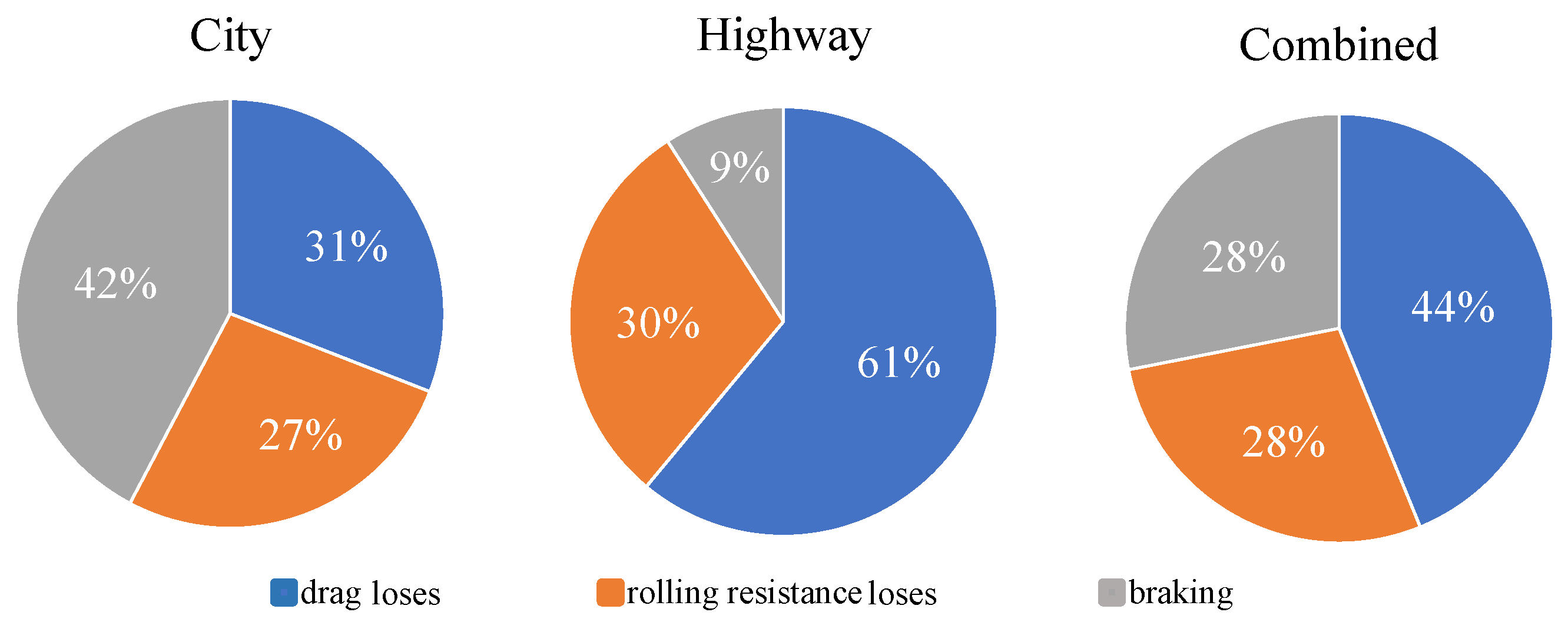
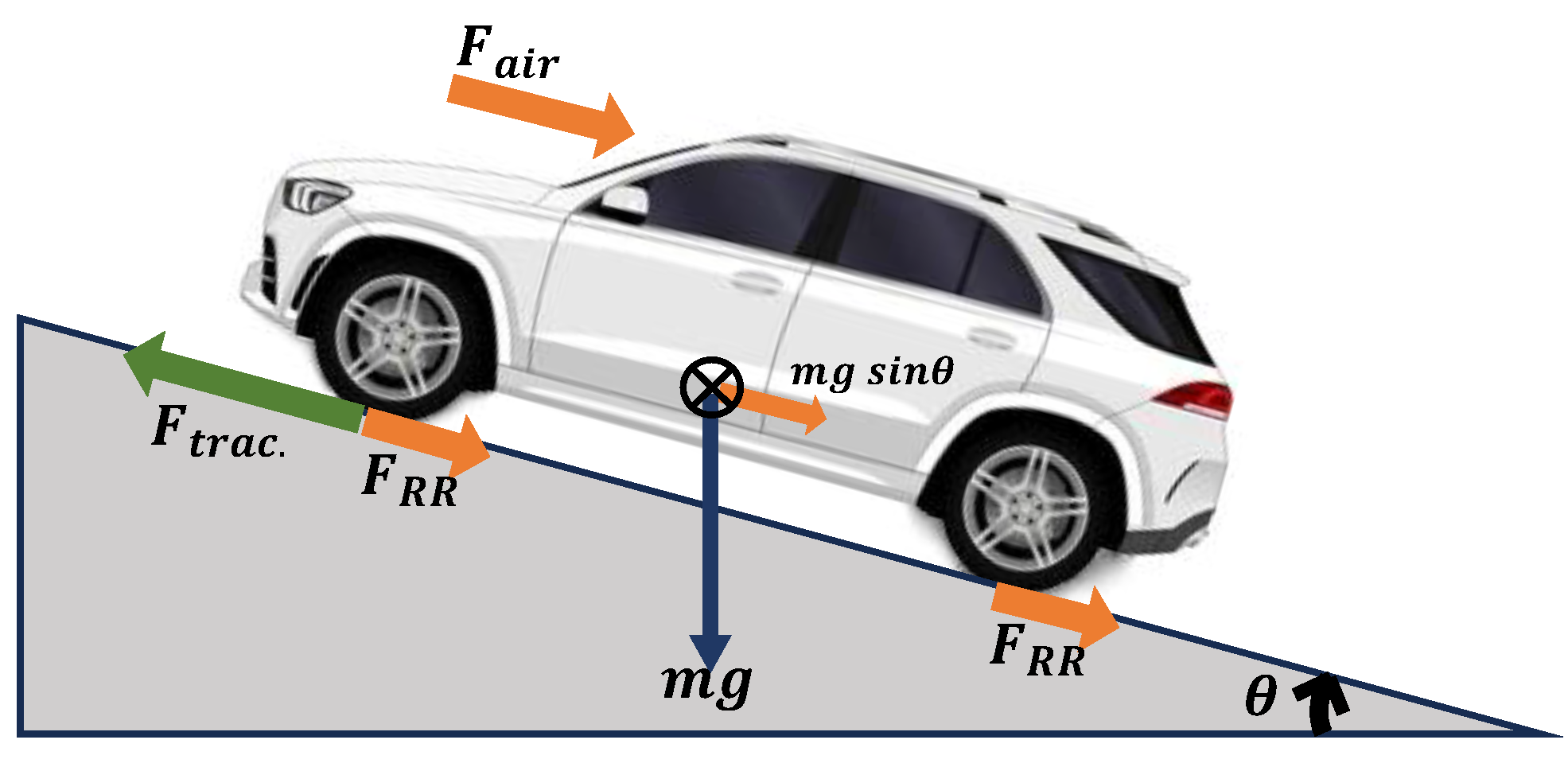
2. Energy Consumption Principles
3. Energy-Saving Methods in CAV
3.1. Road Statement
3.2. Fleet Timing
3.3. Merging and Lane Changing
3.4. Car Following
3.5. Cooperation on Intersection
3.6. Cooperation in Harmonizing Traffic
4. Energy-Saving Methods in E-CAV
4.1. Regenerative Braking Improvement Effect on E-CAVs
- Parallel configuration: In this configuration, the amount of braking force from the RBS and from the hydraulic braking system always depends on the braking master cylinder. The mechanical distributor system could be set up so that, in low levels of deceleration demand (which is equivalent to low brake master cylinder pressure), the RBS is operating solely [89]. This configuration is the basic configuration of combining RBS with a hydraulic system, and it does not need any control strategy to switch between different braking systems.
- Series brake with optimal feel: In the series braking system, the braking procedure is divided into two separate modes. In the first mode, where the braking demand deceleration is within a certain value, the braking force will be exerted by the RBS at the driven wheels. In the second mode, when the braking demand deceleration is greater than a certain value, the mechanical braking system would operate on both front and rear wheels. In the second mode, the RBS is also performing regeneration but the mechanical braking system is responsible for the rest of the necessary torque for matching the whole vehicle’s deceleration with the deceleration demand [90]. This system brings optimal braking feel and the braking system acts like that in traditional vehicles. It is also noticeable that this braking strategy keeps vehicle dynamics just like a conventional vehicle. However, this minimizes the utilization of RBS.
- Series brake with maximum energy recovery: In this braking combination method, the goal is to maximize energy recovery. Therefore while the brake deceleration demand is less than the maximum feasible deceleration, the vehicle utilizes RBS braking force at the driven wheels (in most cases front wheels). If the RBS braking force is not enough to match the braking deceleration demand, the mechanical brake system at the rear wheels is then used to supply the additional force needed to achieve the desired deceleration [79].
4.2. Fleet Timing
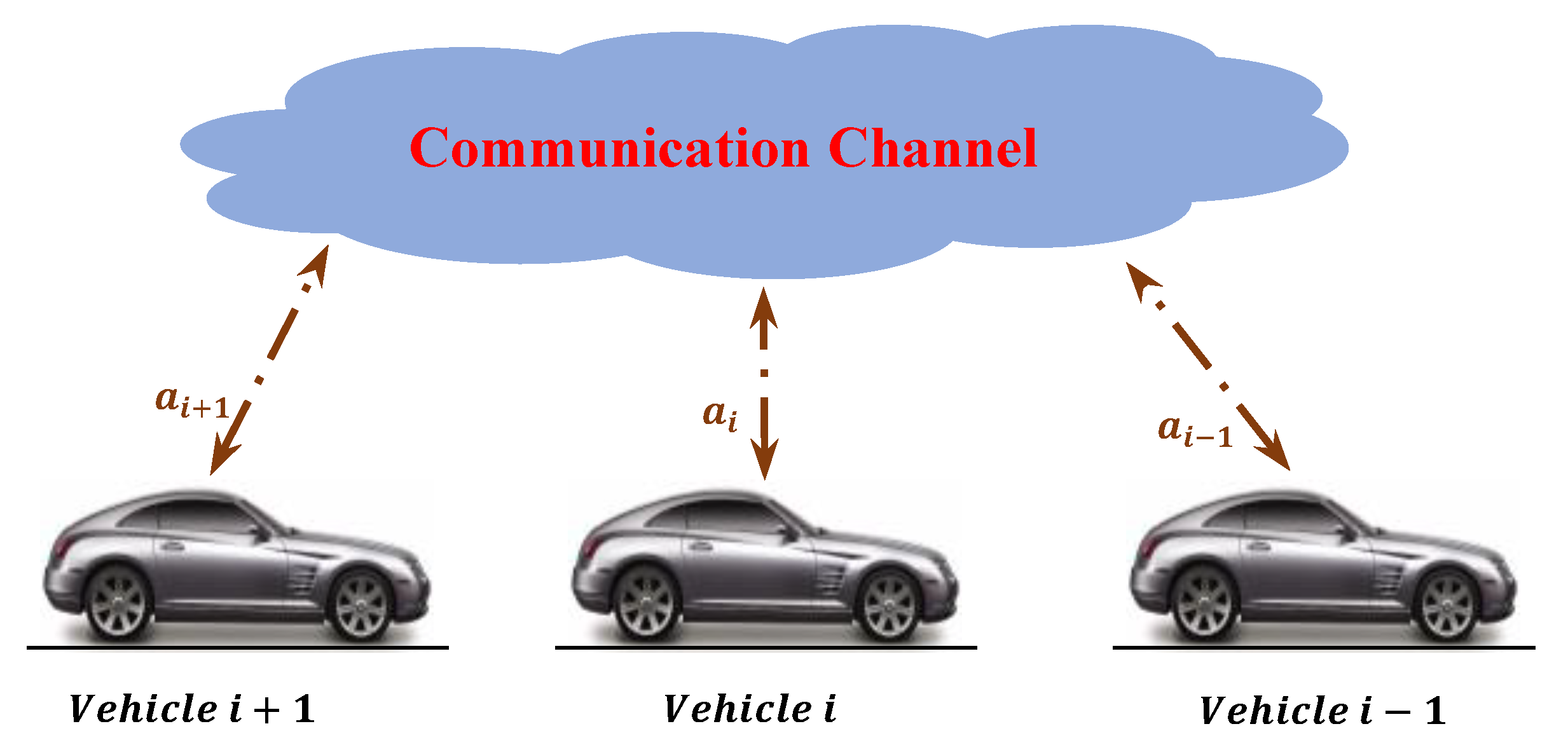
4.3. Car Following, Anticipation, and CACC
4.4. Merging
4.5. Cooperation on Traffic Harmonization
5. Summary
5.1. Challenges
5.2. Conclusion and Future Directions
- A number of articles have determined that the effect of CAVs’ features in decreasing energy consumption is greater in conventional vehicles than in EVs.
- EVs are as capable as conventional vehicles to use connectivity and autonomous mode to decrease energy consumption, despite fewer studies.
- Research gaps in studying the effect of CAV technology on increasing E-CAV efficiency are found in:
- Merging and lane changing CAVs’ feature;
- Cooperation at intersections;
- Using road statements.
- The most effective CAVs’ features on energy efficiency which need more study are:
- How to maximize the utilization and efficiency of RBS using E-CAVs’ capabilities;
- Implementation of eco-CACC algorithms in E-CAVs since it has more long-term effects.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ACC | Adaptive Cruise Control |
| EV | Electric Vehicle |
| CACC | Cooperative Adaptive Cruise Control |
| CAV | Connected Autonomous Vehicle |
| EV | Electric Vehicle |
| E-CAV | Electric Connected Autonomous Vehicle |
| ICEV | Internal Combustion Engine Vehicle |
| RBS | Regenerative Brake System |
| SOC | State Of Charge |
| V2V | Vehicle to Vehicle |
| V2I | Vehicle to Infrastructure |
| VIL | Vehicle In the Loop |
References
- Statharas, S.; Moysoglou, Y.; Siskos, P.; Zazias, G.; Capros, P. Factors influencing electric vehicle penetration in the EU by 2030: A model-based policy assessment. Energies 2019, 12, 2739. [Google Scholar] [CrossRef]
- Yadlapalli, R.T.; Kotapati, A.; Kandipati, R.; Koritala, C.S. A review on energy efficient technologies for electric vehicle applications. J. Energy Storage 2022, 50, 104212. [Google Scholar] [CrossRef]
- Shao, L.; Karci, A.E.H.; Tavernini, D.; Sorniotti, A.; Cheng, M. Design approaches and control strategies for energy-efficient electric machines for electric vehicles—A review. IEEE Access 2020, 8, 116900–116913. [Google Scholar] [CrossRef]
- Mali, V.; Saxena, R.; Kumar, K.; Kalam, A.; Tripathi, B. Review on battery thermal management systems for energy-efficient electric vehicles. Renew. Sustain. Energy Rev. 2021, 151, 111611. [Google Scholar] [CrossRef]
- Genovese, A.; Ortenzi, F.; Villante, C. On the energy efficiency of quick DC vehicle battery charging. World Electr. Veh. J. 2015, 7, 570–576. [Google Scholar] [CrossRef]
- De Cauwer, C.; Verbeke, W.; Coosemans, T.; Faid, S.; Van Mierlo, J. A data-driven method for energy consumption prediction and energy-efficient routing of electric vehicles in real-world conditions. Energies 2017, 10, 608. [Google Scholar] [CrossRef]
- Sayed, K.; Kassem, A.; Saleeb, H.; Alghamdi, A.S.; Abo-Khalil, A.G. Energy-saving of battery electric vehicle powertrain and efficiency improvement during different standard driving cycles. Sustainability 2020, 12, 10466. [Google Scholar] [CrossRef]
- Hung, C.R.; Völler, S.; Agez, M.; Majeau-Bettez, G.; Strømman, A.H. Regionalized climate footprints of battery electric vehicles in Europe. J. Clean. Prod. 2021, 322, 129052. [Google Scholar] [CrossRef]
- Noei, S.; Parvizimosaed, M.; Noei, M. Longitudinal Control for Connected and Automated Vehicles in Contested Environments. Electronics 2021, 10, 1994. [Google Scholar] [CrossRef]
- Vahidi, A.; Sciarretta, A. Energy saving potentials of connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2018, 95, 822–843. [Google Scholar] [CrossRef]
- Ersal, T.; Kolmanovsky, I.; Masoud, N.; Ozay, N.; Scruggs, J.; Vasudevan, R.; Orosz, G. Connected and automated road vehicles: State of the art and future challenges. Veh. Syst. Dyn. 2020, 58, 672–704. [Google Scholar] [CrossRef]
- Guanetti, J.; Kim, Y.; Borrelli, F. Control of connected and automated vehicles: State of the art and future challenges. Annu. Rev. Control 2018, 45, 18–40. [Google Scholar] [CrossRef]
- Campisi, T.; Severino, A.; Al-Rashid, M.A.; Pau, G. The development of the smart cities in the connected and autonomous vehicles (CAVs) era: From mobility patterns to scaling in cities. Infrastructures 2021, 6, 100. [Google Scholar] [CrossRef]
- Sciarretta, A.; Vahidi, A. Energy-Efficient Driving of Road Vehicles; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Asadi, B.; Zhang, C.; Vahidi, A. The role of traffic flow preview for planning fuel optimal vehicle velocity. In Proceedings of the Dynamic Systems and Control Conference, Cambridge, MA, USA, 12–15 September 2010; Volume 44182, pp. 813–819. [Google Scholar]
- Wan, N.; Zhang, C.; Vahidi, A. Probabilistic anticipation and control in autonomous car following. IEEE Trans. Control Syst. Technol. 2017, 27, 30–38. [Google Scholar] [CrossRef]
- Huang, W.; Bevly, D.M.; Schnick, S.; Li, X. Using 3D road geometry to optimize heavy truck fuel efficiency. In Proceedings of the 2008 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; pp. 334–339. [Google Scholar]
- He, C.R.; Maurer, H.; Orosz, G. Fuel consumption optimization of heavy-duty vehicles with grade, wind, and traffic information. J. Comput. Nonlinear Dyn. 2016, 11, 061011. [Google Scholar] [CrossRef]
- Li, M.; Boriboonsomsin, K.; Wu, G.; Zhang, W.B.; Barth, M. Traffic energy and emission reductions at signalized intersections: A study of the benefits of advanced driver information. Int. J. Intell. Transp. Syst. Res. 2009, 7, 49–58. [Google Scholar]
- Asadi, B.; Vahidi, A. Predictive use of traffic signal state for fuel saving. IFAC Proc. Vol. 2009, 42, 484–489. [Google Scholar] [CrossRef]
- Rakha, H.; Kamalanathsharma, R.K. Eco-driving at signalized intersections using V2I communication. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 341–346. [Google Scholar]
- Jiang, Y.; Zhao, B.; Liu, M.; Yao, Z. A two-level model for traffic signal timing and trajectories planning of multiple CAVs in a random environment. J. Adv. Transp. 2021, 2021, 9945398. [Google Scholar] [CrossRef]
- Xu, B.; Ban, X.J.; Bian, Y.; Wang, J.; Li, K. V2I based cooperation between traffic signal and approaching automated vehicles. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1658–1664. [Google Scholar]
- Garcia-Castro, A.; Monzon, A.; Valdes, C.; Romana, M. Modeling different penetration rates of eco-driving in urban areas: Impacts on traffic flow and emissions. Int. J. Sustain. Transp. 2017, 11, 282–294. [Google Scholar] [CrossRef]
- Mandava, S.; Boriboonsomsin, K.; Barth, M. Arterial velocity planning based on traffic signal information under light traffic conditions. In Proceedings of the 2009 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009; pp. 1–6. [Google Scholar]
- Asadi, B.; Vahidi, A. Predictive cruise control: Utilizing upcoming traffic signal information for improving fuel economy and reducing trip time. IEEE Trans. Control Syst. Technol. 2010, 19, 707–714. [Google Scholar] [CrossRef]
- Jiang, H.; Hu, J.; An, S.; Wang, M.; Park, B.B. Eco approaching at an isolated signalized intersection under partially connected and automated vehicles environment. Transp. Res. Part C Emerg. Technol. 2017, 79, 290–307. [Google Scholar] [CrossRef]
- Gao, Z.; LaClair, T.; Ou, S.; Huff, S.; Wu, G.; Hao, P.; Boriboonsomsin, K.; Barth, M. Evaluation of electric vehicle component performance over eco-driving cycles. Energy 2019, 172, 823–839. [Google Scholar] [CrossRef]
- Wu, G.; Hao, P.; Wang, Z.; Jiang, Y.; Boriboonsomsin, K.; Barth, M.; McConnell, M.; Qiang, S.; Stark, J. Eco-approach and departure along signalized corridors considering powertrain characteristics. SAE Int. J. Sust. Trans. Energy Environ. Policy 2021, 2, 25–40. [Google Scholar] [CrossRef]
- Wan, N.; Vahidi, A.; Luckow, A. Optimal speed advisory for connected vehicles in arterial roads and the impact on mixed traffic. Transp. Res. Part C Emerg. Technol. 2016, 69, 548–563. [Google Scholar] [CrossRef]
- Kamalanathsharma, R.K.; Rakha, H.A.; Yang, H. Networkwide impacts of vehicle ecospeed control in the vicinity of traffic signalized intersections. Transp. Res. Rec. 2015, 2503, 91–99. [Google Scholar] [CrossRef]
- Liu, K.; Gong, J.; Kurt, A.; Chen, H.; Ozguner, U. Dynamic modeling and control of high-speed automated vehicles for lane change maneuver. IEEE Trans. Intell. Veh. 2018, 3, 329–339. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Helbing, D. General lane-changing model MOBIL for car-following models. Transp. Res. Rec. 2007, 1999, 86–94. [Google Scholar] [CrossRef]
- Rios-Torres, J.; Malikopoulos, A.A. Automated and cooperative vehicle merging at highway on-ramps. IEEE Trans. Intell. Transp. Syst. 2016, 18, 780–789. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Mukai, M.; Murata, J.; Kawabe, T. Model predictive control of vehicles on urban roads for improved fuel economy. IEEE Trans. Control Syst. Technol. 2012, 21, 831–841. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Taguchi, S.; Yoshimura, T. Efficient driving on multilane roads under a connected vehicle environment. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2541–2551. [Google Scholar] [CrossRef]
- Awal, T.; Murshed, M.; Ali, M. An efficient cooperative lane-changing algorithm for sensor-and communication-enabled automated vehicles. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 28 June–1 July 2015; pp. 1328–1333. [Google Scholar]
- Al Alam, A.; Gattami, A.; Johansson, K.H. An experimental study on the fuel reduction potential of heavy duty vehicle platooning. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 306–311. [Google Scholar]
- Alam, A. Fuel-Efficient Heavy-Duty Vehicle Platooning. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2014. [Google Scholar]
- Tsugawa, S. Results and issues of an automated truck platoon within the energy ITS project. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 642–647. [Google Scholar]
- Kunze, R.; Ramakers, R.; Henning, K.; Jeschke, S. Organization and operation of electronically coupled truck platoons on German motorways. In Automation, Communication and Cybernetics in Science and Engineering 2009/2010; Springer: Berlin/Heidelberg, Germany, 2011; pp. 427–439. [Google Scholar]
- Tsugawa, S.; Jeschke, S.; Shladover, S.E. A review of truck platooning projects for energy savings. IEEE Trans. Intell. Veh. 2016, 1, 68–77. [Google Scholar] [CrossRef]
- Bishop, R.; Bevly, D.; Humphreys, L.; Boyd, S.; Murray, D. Evaluation and testing of driver-assistive truck platooning: Phase 2 final results. Transp. Res. Rec. 2017, 2615, 11–18. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, F.; Ma, X.; Pan, X. Fuel economy in truck platooning: A literature overview and directions for future research. J. Adv. Transp. 2020, 2020, 2604012. [Google Scholar] [CrossRef]
- Dollar, R.A.; Vahidi, A. Quantifying the impact of limited information and control robustness on connected automated platoons. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–7. [Google Scholar]
- Guo, Y.; Ma, J.; Leslie, E.; Huang, Z. Evaluating the effectiveness of integrated connected automated vehicle applications applied to freeway managed lanes. IEEE Trans. Intell. Transp. Syst. 2020, 23, 522–536. [Google Scholar] [CrossRef]
- Liu, H.; Shladover, S.E.; Lu, X.Y.; Kan, X. Freeway vehicle fuel efficiency improvement via cooperative adaptive cruise control. J. Intell. Transp. Syst. 2021, 25, 574–586. [Google Scholar] [CrossRef]
- HomChaudhuri, B.; Vahidi, A.; Pisu, P. Fast model predictive control-based fuel efficient control strategy for a group of connected vehicles in urban road conditions. IEEE Trans. Control Syst. Technol. 2016, 25, 760–767. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.E.; Li, K.; Borrelli, F.; Hedrick, J.K. Distributed model predictive control for heterogeneous vehicle platoons under unidirectional topologies. IEEE Trans. Control Syst. Technol. 2016, 25, 899–910. [Google Scholar] [CrossRef]
- Zhong, Z.; Lee, J.; Zhao, L. Multiobjective optimization framework for cooperative adaptive cruise control vehicles in the automated vehicle platooning environment. Transp. Res. Rec. 2017, 2625, 32–42. [Google Scholar] [CrossRef]
- He, Y.; Zhou, Q.; Makridis, M.; Mattas, K.; Li, J.; Williams, H.; Xu, H. Multiobjective co-optimization of cooperative adaptive cruise control and energy management strategy for PHEVs. IEEE Trans. Transp. Electrif. 2020, 6, 346–355. [Google Scholar] [CrossRef]
- He, Y.; Ciuffo, B.; Zhou, Q.; Makridis, M.; Mattas, K.; Li, J.; Li, Z.; Yan, F.; Xu, H. Adaptive Cruise Control Strategies Implemented on Experimental Vehicles: A Review. IFAC-PapersOnLine 2019, 52, 21–27. [Google Scholar] [CrossRef]
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems-Introduction to Modeling and Optimization; Springer: Berlin, Germany, 2013. [Google Scholar]
- Lee, J.; Park, B. Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment. IEEE Trans. Intell. Transp. Syst. 2012, 13, 81–90. [Google Scholar] [CrossRef]
- Xu, B.; Ban, X.J.; Bian, Y.; Li, W.; Wang, J.; Li, S.E.; Li, K. Cooperative method of traffic signal optimization and speed control of connected vehicles at isolated intersections. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1390–1403. [Google Scholar] [CrossRef]
- Tajalli, M.; Hajbabaie, A. Traffic signal timing and trajectory optimization in a mixed autonomy traffic stream. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6525–6538. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Taguchi, S.; Yoshimura, T. Intersection vehicle cooperative eco-driving in the context of partially connected vehicle environment. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 1261–1266. [Google Scholar]
- Ferreira, M.; Fernandes, R.; Conceição, H.; Viriyasitavat, W.; Tonguz, O.K. Self-organized traffic control. In Proceedings of the Seventh ACM International Workshop on VehiculAr InterNETworking, Chicago, IL, USA, 24 September 2010; pp. 85–90. [Google Scholar]
- Viriyasitavat, W.; Tonguz, O.K. Priority management of emergency vehicles at intersections using self-organized traffic control. In Proceedings of the 2012 IEEE Vehicular Technology Conference (VTC Fall), Quebec City, QC, Canada, 3–6 September 2012; pp. 1–4. [Google Scholar]
- Wu, J.; Qu, X. Intersection control with connected and automated vehicles: A review. J. Intell. Connect. Veh. 2022, 5, 260–269. [Google Scholar] [CrossRef]
- Huang, S.; Sadek, A.W.; Zhao, Y. Assessing the mobility and environmental benefits of reservation-based intelligent intersections using an integrated simulator. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1201–1214. [Google Scholar] [CrossRef]
- Fayazi, S.A.; Vahidi, A. Vehicle-in-the-loop (VIL) verification of a smart city intersection control scheme for autonomous vehicles. In Proceedings of the 2017 IEEE Conference on Control Technology and Applications (CCTA), Maui, HI, USA, 27–30 August 2017; pp. 1575–1580. [Google Scholar]
- Fayazi, S.A.; Vahidi, A. Mixed-integer linear programming for optimal scheduling of autonomous vehicle intersection crossing. IEEE Trans. Intell. Veh. 2018, 3, 287–299. [Google Scholar] [CrossRef]
- Jayawardana, V.; Wu, C. Learning Eco-Driving Strategies at Signalized Intersections. arXiv 2022, arXiv:2204.12561. [Google Scholar]
- Wang, E.; Memar, F.H.; Korzelius, S.; Sadek, A.W.; Qiao, C. A Reinforcement Learning Approach to CAV and Intersection Control for Energy Efficiency. In Proceedings of the 2022 Fifth International Conference on Connected and Autonomous Driving (MetroCAD), Detroit, MI, USA, 28–29 April 2022; pp. 81–88. [Google Scholar]
- Englund, C.; Chen, L.; Voronov, A. Cooperative speed harmonization for efficient road utilization. In Proceedings of the 2014 7th International Workshop on Communication Technologies for Vehicles (Nets4Cars-Fall), St. Petersburg, Russia, 6–8 October 2014; pp. 19–23. [Google Scholar]
- Guo, Y.; Ma, J. Leveraging existing high-occupancy vehicle lanes for mixed-autonomy traffic management with emerging connected automated vehicle applications. Transp. A Transp. Sci. 2020, 16, 1375–1399. [Google Scholar] [CrossRef]
- Dey, K.C.; Yan, L.; Wang, X.; Wang, Y.; Shen, H.; Chowdhury, M.; Yu, L.; Qiu, C.; Soundararaj, V. A review of communication, driver characteristics, and controls aspects of cooperative adaptive cruise control (CACC). IEEE Trans. Intell. Transp. Syst. 2015, 17, 491–509. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Imura, J.i.; Hayakawa, T.; Ohata, A.; Aihara, K. Smart driving of a vehicle using model predictive control for improving traffic flow. IEEE Trans. Intell. Transp. Syst. 2014, 15, 878–888. [Google Scholar] [CrossRef]
- Saleem, M.; Abbas, S.; Ghazal, T.M.; Khan, M.A.; Sahawneh, N.; Ahmad, M. Smart cities: Fusion-based intelligent traffic congestion control system for vehicular networks using machine learning techniques. Egypt. Inform. J. 2022, 23, 417–426. [Google Scholar] [CrossRef]
- Wang, M.; Daamen, W.; Hoogendoorn, S.P.; van Arem, B. Cooperative car-following control: Distributed algorithm and impact on moving jam features. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1459–1471. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Nishi, R.; Tomoeda, A.; Shimura, K.; Nishinari, K. Theory of jam-absorption driving. Transp. Res. Part B Methodol. 2013, 50, 116–129. [Google Scholar] [CrossRef]
- Stern, R.E.; Cui, S.; Delle Monache, M.L.; Bhadani, R.; Bunting, M.; Churchill, M.; Hamilton, N.; Pohlmann, H.; Wu, F.; Piccoli, B.; et al. Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments. Transp. Res. Part C Emerg. Technol. 2018, 89, 205–221. [Google Scholar] [CrossRef]
- He, Z.; Zheng, L.; Song, L.; Zhu, N. A jam-absorption driving strategy for mitigating traffic oscillations. IEEE Trans. Intell. Transp. Syst. 2016, 18, 802–813. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, G.; Li, Y.; Li, Z. Optimal jam-absorption driving strategy for mitigating rear-end collision risks with oscillations on freeway straight segments. Accid. Anal. Prev. 2020, 135, 105367. [Google Scholar] [CrossRef]
- Wang, Y. Traffic Congestion and Shockwave Damping through Advanced Driver Assistance System (ADAS) Longitudinal Vehicle Control. Ph.D. Thesis, Rutgers The State University of New Jersey, School of Graduate Studies, New Brunswick, NJ, USA, 2022. [Google Scholar]
- Lang, D.; Schmied, R.; Del Re, L. Prediction of preceding driver behavior for fuel efficient cooperative adaptive cruise control. SAE Int. J. Engines 2014, 7, 14–20. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K.M. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Hamada, A.T.; Orhan, M.F. An overview of regenerative braking systems. J. Energy Storage 2022, 52, 105033. [Google Scholar] [CrossRef]
- Ko, J.; Ko, S.; Son, H.; Yoo, B.; Cheon, J.; Kim, H. Development of brake system and regenerative braking cooperative control algorithm for automatic-transmission-based hybrid electric vehicles. IEEE Trans. Veh. Technol. 2014, 64, 431–440. [Google Scholar] [CrossRef]
- Panagiotidis, M.; Delagrammatikas, G.; Assanis, D. Development and use of a regenerative braking model for a parallel hybrid electric vehicle. SAE Trans. 2000, 109, 1180–1191. [Google Scholar]
- Hsu, T.R. On a flywheel-based regenerative braking system for regenerative energy recovery. arXiv 2013, arXiv:1311.6012. [Google Scholar]
- Liu, S.; Martin, C.; Lashmore, D.; Schauer, M.; Livermore, C. Regenerative braking systems with torsional springs made of carbon nanotube yarn. J. Phys. Conf. Ser. 2014, 557, 012060. [Google Scholar] [CrossRef]
- Zhao, W.; Wu, G.; Wang, C.; Yu, L.; Li, Y. Energy transfer and utilization efficiency of regenerative braking with hybrid energy storage system. J. Power Sources 2019, 427, 174–183. [Google Scholar] [CrossRef]
- Kim, D.; Eo, J.S.; Kim, Y.; Guanetti, J.; Miller, R.; Borrelli, F. Energy-Optimal Deceleration Planning System for Regenerative Braking of Electrified Vehicles with Connectivity and Automation; Technical Report; SAE: Warrendale, PA, USA, 2020. [Google Scholar]
- Where the Energy Goes: Gasoline Vehicles. Available online: https://www.fueleconomy.gov/feg/atv.shtml (accessed on 24 September 2023).
- Van Sterkenburg, S.; Rietveld, E.; Rieck, F.; Veenhuizen, B.; Bosma, H. Analysis of regenerative braking efficiency—A case study of two electric vehicles operating in the Rotterdam area. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- Jingming, Z.; Baoyu, S.; Xiaojing, N. Optimization of parallel regenerative braking control strategy. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–4. [Google Scholar]
- Sangtarash, F.; Esfahanian, V.; Nehzati, H.; Haddadi, S.; Bavanpour, M.A.; Haghpanah, B. Effect of different regenerative braking strategies on braking performance and fuel economy in a hybrid electric bus employing CRUISE vehicle simulation. SAE Int. J. Fuels Lubr. 2009, 1, 828–837. [Google Scholar] [CrossRef]
- Valladolid, J.D.; Patino, D.; Gruosso, G.; Correa-Flórez, C.A.; Vuelvas, J.; Espinoza, F. A novel energy-efficiency optimization approach based on driving patterns styles and experimental tests for electric vehicles. Electronics 2021, 10, 1199. [Google Scholar] [CrossRef]
- Burress, T. Benchmarking state-of-the-art technologies. In Proceedings of the Oak Ridge National Laboratory (ORNL), 2013 US DOE Hydrogen and Fuel Cells Program and Vehicle Technologies Program Annual Merit Review and Peer Evaluation Meeting, Washington, DC, USA, 14–16 May 2013. [Google Scholar]
- Miyatake, M.; Kuriyama, M.; Takeda, Y. Theoretical study on eco-driving technique for an Electric Vehicle considering traffic signals. In Proceedings of the 2011 IEEE Ninth International Conference on Power Electronics and Drive Systems, Singapore, 5–8 December 2011; pp. 733–738. [Google Scholar] [CrossRef]
- Zhang, R.; Yao, E. Eco-driving at signalised intersections for electric vehicles. IET Intell. Transp. Syst. 2015, 9, 488–497. [Google Scholar] [CrossRef]
- Qi, X.; Barth, M.J.; Wu, G.; Boriboonsomsin, K.; Wang, P. Energy impact of connected eco-driving on electric vehicles. In Road Vehicle Automation 4; Springer: Berlin/Heidelberg, Germany, 2018; pp. 97–111. [Google Scholar]
- Qi, X.; Wang, P.; Wu, G.; Boriboonsomsin, K.; Barth, M.J. Energy and mobility benefits from connected ecodriving for electric vehicles. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Bin Al Islam, S.; Aziz, H.M.A.; Wang, H.; Young, S.E. Minimizing energy consumption from connected signalized intersections by reinforcement learning. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 1870–1875. [Google Scholar] [CrossRef]
- Flehmig, F.; Sardari, A.; Fischer, U.; Wagner, A. Energy optimal adaptive cruise control during following of other vehicles. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 28 June–1 July 2015; pp. 724–729. [Google Scholar]
- Bertoni, L.; Guanetti, J.; Basso, M.; Masoero, M.; Cetinkunt, S.; Borrelli, F. An adaptive cruise control for connected energy-saving electric vehicles. IFAC-PapersOnLine 2017, 50, 2359–2364. [Google Scholar] [CrossRef]
- Han, J.; Sciarretta, A.; Ojeda, L.L.; De Nunzio, G.; Thibault, L. Safe-and eco-driving control for connected and automated electric vehicles using analytical state-constrained optimal solution. IEEE Trans. Intell. Veh. 2018, 3, 163–172. [Google Scholar] [CrossRef]
- Lee, H.; Kim, K.; Kim, N.; Cha, S.W. Energy efficient speed planning of electric vehicles for car-following scenario using model-based reinforcement learning. Appl. Energy 2022, 313, 118460. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Hashikura, K.; Hayakawa, T.; Yamada, K.; Imura, J.I. Adaptive Cruise Control with Look-Ahead Anticipation for Driving on Freeways. Appl. Sci. 2022, 12, 929. [Google Scholar] [CrossRef]
- Lu, C.; Dong, J.; Hu, L. Energy-efficient adaptive cruise control for electric connected and autonomous. IEEE Intell. Transp. Syst. Mag. 2019, 11, 42–55. [Google Scholar] [CrossRef]
- Albatayneh, A.; Assaf, M.N.; Alterman, D.; Jaradat, M. Comparison of the overall energy efficiency for internal combustion engine vehicles and electric vehicles. Rigas Teh. Univ. Zinat. Raksti 2020, 24, 669–680. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Road Statement | |
|---|---|
| Offline data [17,18] | 2–11.6% |
| Fleet Timing | |
| Using traffic light data [19] | 7–14% |
| Traffic data + optimal control algorithm [20] | up to 59% |
| EAD [27,28] | 2.02–58% |
| EAD + powertrain consideration [29] | 12–28% |
| Micro optimization [30,31] | 26–29% |
| Merging and Lane Change | |
| Selfish Optimization [36] | 7–14% |
| Car Following | |
| Trucks platooning [39,40] | 5–15% |
| MPC + platoon (100% platooning) [45] | 50% |
| Social optimization of CACC [47] | up to 50% |
| Multi-objective optimization with considering | 33% |
| safety and driver comfort [50] | |
| Cooperation on Intersection | |
| Cooperation at intersections [36,57] | 6.4–14.3% |
| Omitting physical traffic light [27] | 50–58% |
| MILP optimization with optimization [63] | 20% |
| Using a learning-based approach [64] | 18% |
| Cooperation on Traffic Harmonization | |
| Traffic harmonization at an intersection [66] | 5–11% |
| Traffic harmonization by CACC [78] | 5–25% |
| Jam absorption [75,77] | 40% |
| Fleet Timing | |
|---|---|
| Eco-driving at signalized intersections [94] | 8–31% |
| EAD [95] | 21.9% |
| Selfish optimization + EAD [97] | 47% |
| Car Following, Anticipation, and CACC | |
| Optimal deceleration planning with RBS [86] | 33% |
| Eco-CACC with MPC [99] | 15.4–75% |
| Multi-objective optimization considering | 8–44% |
| safety and feasibility [100] | |
| Cooperation on Traffic Harmonization | |
| Traffic harmonization effect of E-CAVs [103] | 5.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Faghihian, H.; Sargolzaei, A. Energy Efficiency of Connected Autonomous Vehicles: A Review. Electronics 2023, 12, 4086. https://doi.org/10.3390/electronics12194086
Faghihian H, Sargolzaei A. Energy Efficiency of Connected Autonomous Vehicles: A Review. Electronics. 2023; 12(19):4086. https://doi.org/10.3390/electronics12194086
Chicago/Turabian StyleFaghihian, Hamed, and Arman Sargolzaei. 2023. "Energy Efficiency of Connected Autonomous Vehicles: A Review" Electronics 12, no. 19: 4086. https://doi.org/10.3390/electronics12194086