
Measuring Received Signal Strength of UWB Chaotic Radio Pulses for Ranging and Positioning


Abstract
:1. Introduction
- Development of radio technology at the physical layer. This includes the study of various signal characteristics (frequency, time, correlation, energy) and the ways they can be used to measure distance. One of the important aspects of radio technology is that it can be used for both positioning and data transmission, i.e., the distance can be measured by the same equipment with which the information is delivered, or both tasks can be processed simultaneously. To date, WiFi, Bluetooth, ZigBee, and UWB technologies are the most popular among the radio technologies used for positioning.
- Signal characteristic used for positioning. Commonly used approaches are estimation by the received signal strength (RSS), time of arrival (TOA), time difference of arrival (TDOA), and angle of arrival (AOA). The choice of the method depends on the specific technology, the available equipment, and the ability to implement one or another method.
- Positioning method. Positioning methods are divided into two groups: one based on a preliminary distance measurement (ranging based) and the other based on the statistical accumulation of a database of received signal characteristics at different points in space, with further probabilistic determination of object position and comparing of the signal characteristics with a database (fingerprinting).
- Signal post-processing methods that improve the accuracy of coordinate estimates. Approaches based on Kalman filtering [4,5], particle filters, machine learning methods [6], neural networks [7,8,9], as well as hybrid (fusion) approaches, based on combinations of different technologies or different distance measurement methods, are proposed [5,10].
- UWB chaotic signals are used for both communication and positioning. In this case, the RSS measurement can be combined with the processes of transmitting/receiving data.
- Noise-like UWB signals are much less prone to multipath fading than narrowband signals, which means less power fluctuation or, other conditions being equal, fewer measurements to achieve the same accuracy as narrowband systems.
- Positioning based on time measurements can be combined with RSS measurements and they can complement each other, similar to the above schemes combining Wi-Fi and UWB systems.
- Development of a method for measuring the power of UWB chaotic radio pulses;
- Assessment of signal strength and distance measurement accuracy achievable by this method;
- Experimental verification of the proposed method in the problem of wireless ranging and positioning in a real indoor wireless channel;
- Thereby creating a baseline for the further development of approaches to solving the problem of wireless positioning of objects using UWB chaotic signals.
2. Methods and Materials
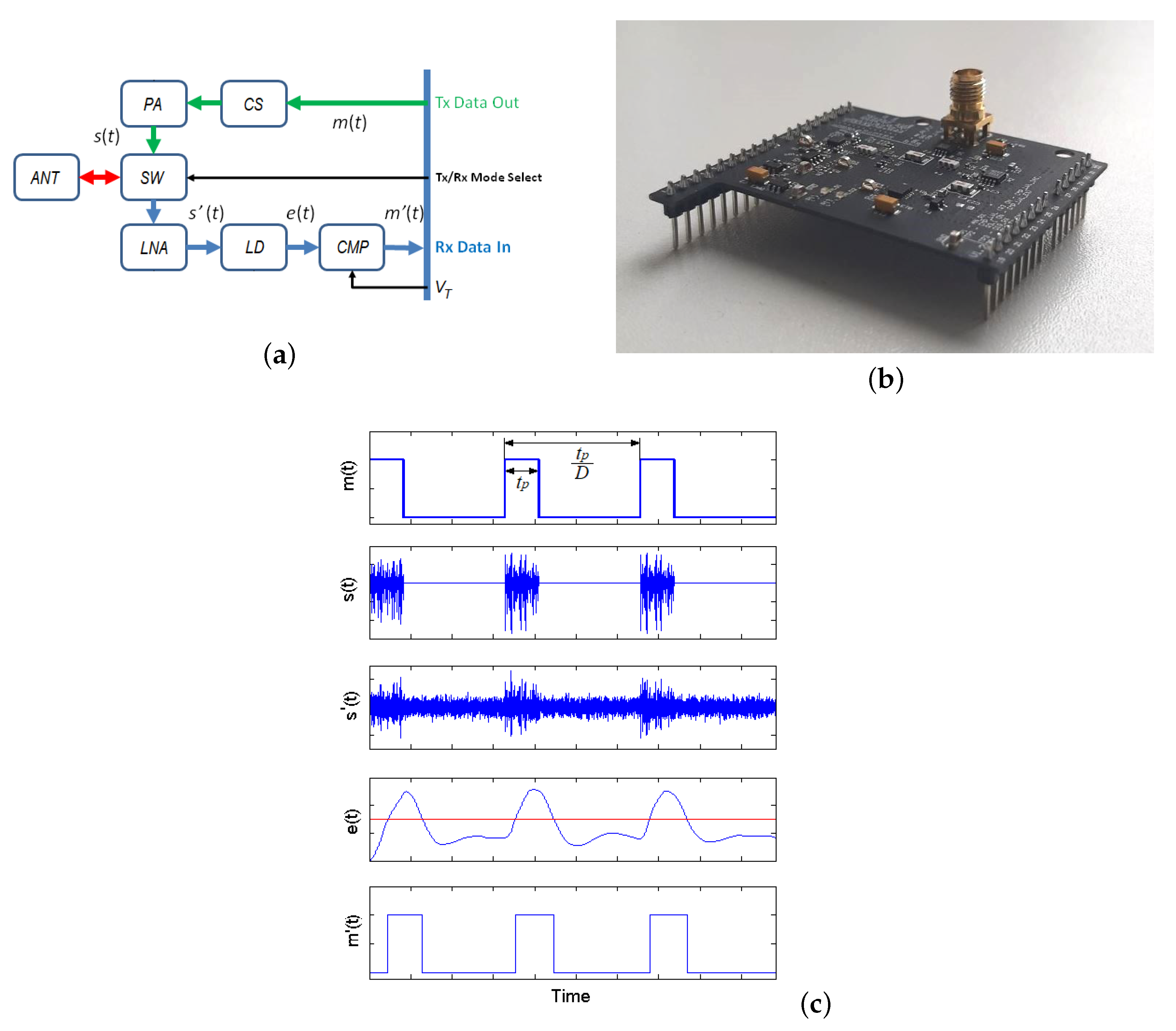
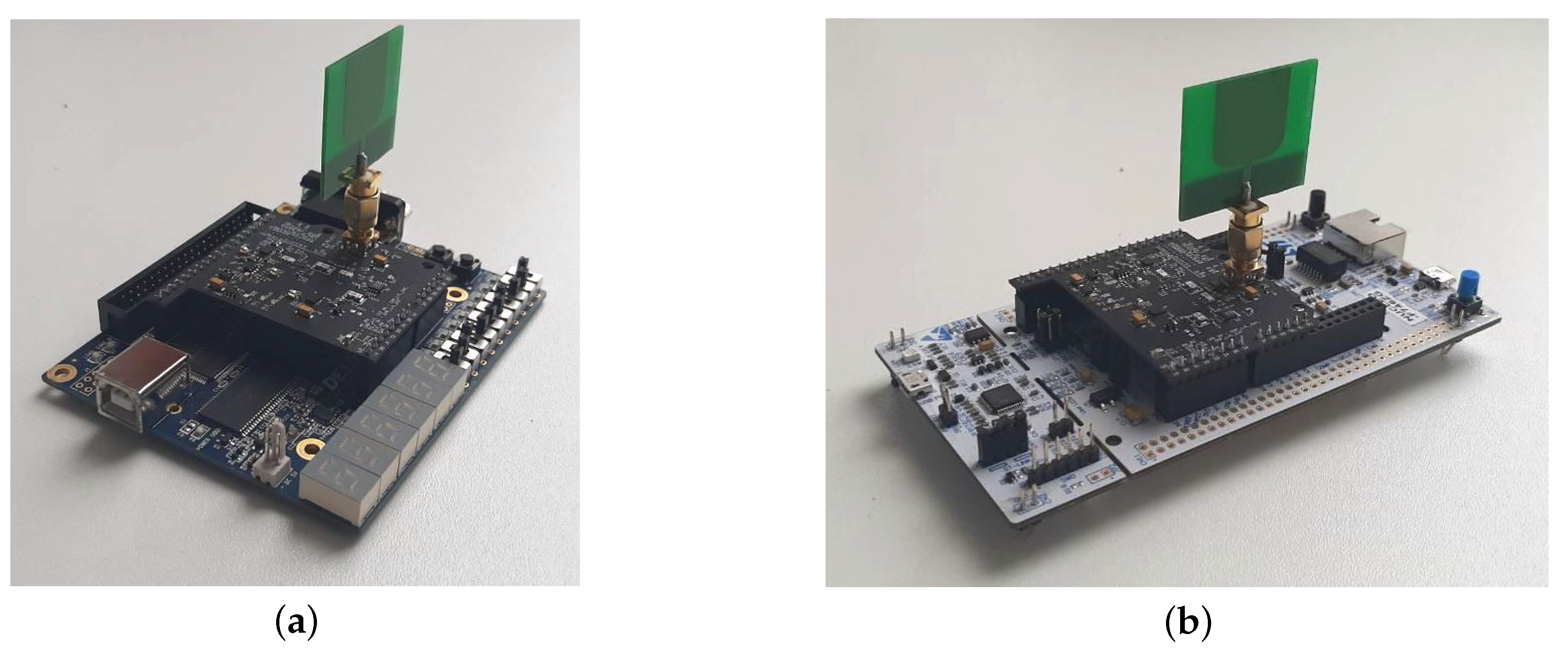
2.1. Wireless UWB Transceivers
2.2. Method of Measuring Signal Power
- The measured value of the received signal power can unambiguously be related to the actual received signal power;
- The received signal power decreases with the distance d to the source in accordance with a monotonic deterministic law.
- Choose and , which are obviously below and above the possible amplitudes of the radio pulse envelope (they are determined by the characteristics of the receiver).
- On the comparator, set the initial value of the threshold voltage with which is compared at .
- Form a sequence of M binary samples .
- Sum the sample values up, calculate sum S (3).
- Compare the sum S with .
- If , then set , .
- If , then set , .
- Repeat items 2 to 7, while .
- Take the resulting value of as an estimate of the amplitude of radio pulses .
2.3. Method of Distance Measurement
2.4. Distance Determining Errors
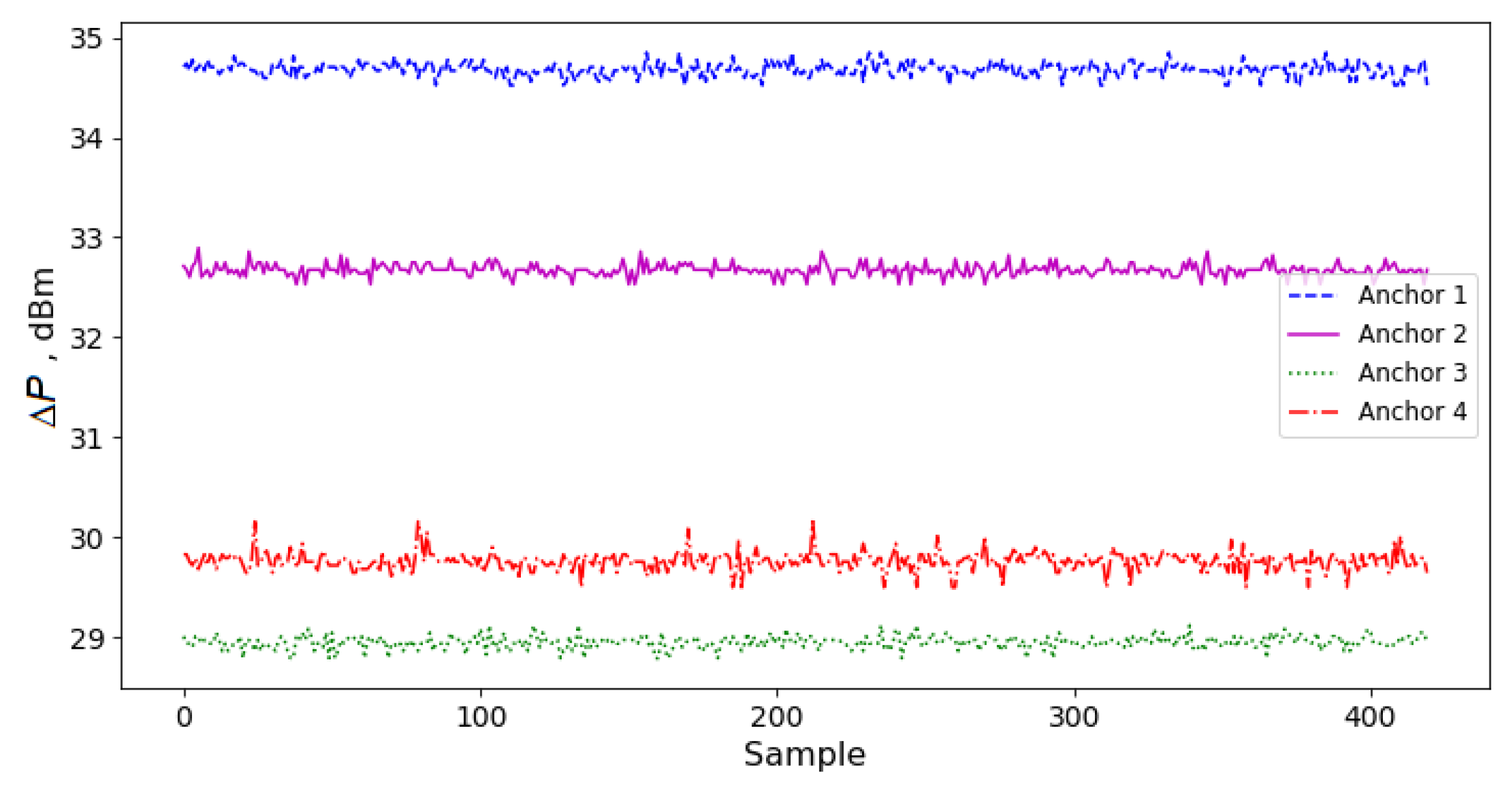
2.5. Wireless Signal Strength Measurement in Stationary Conditions
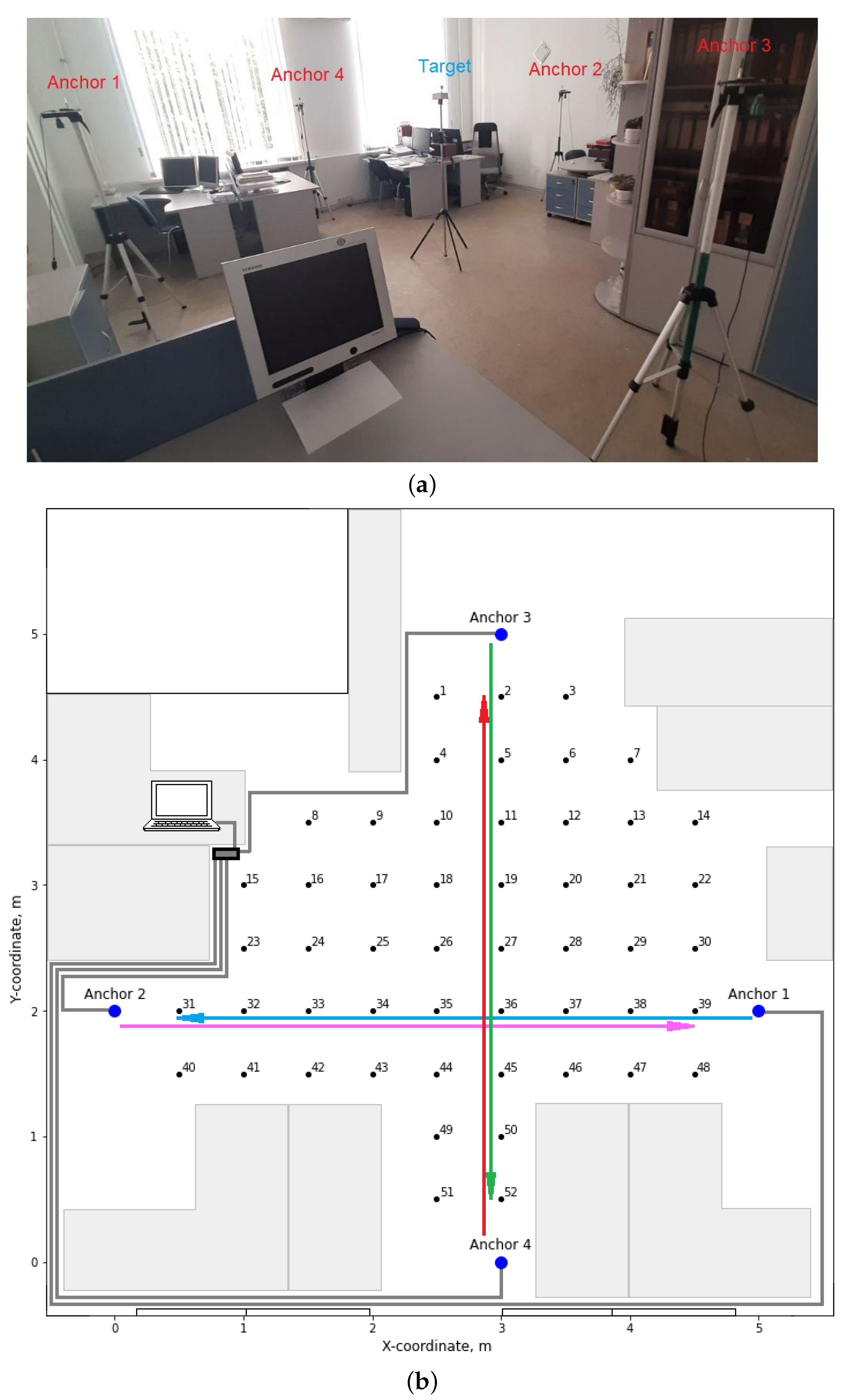
2.6. Schemes of Experimental Distance Measurement and Positioning
3. Results
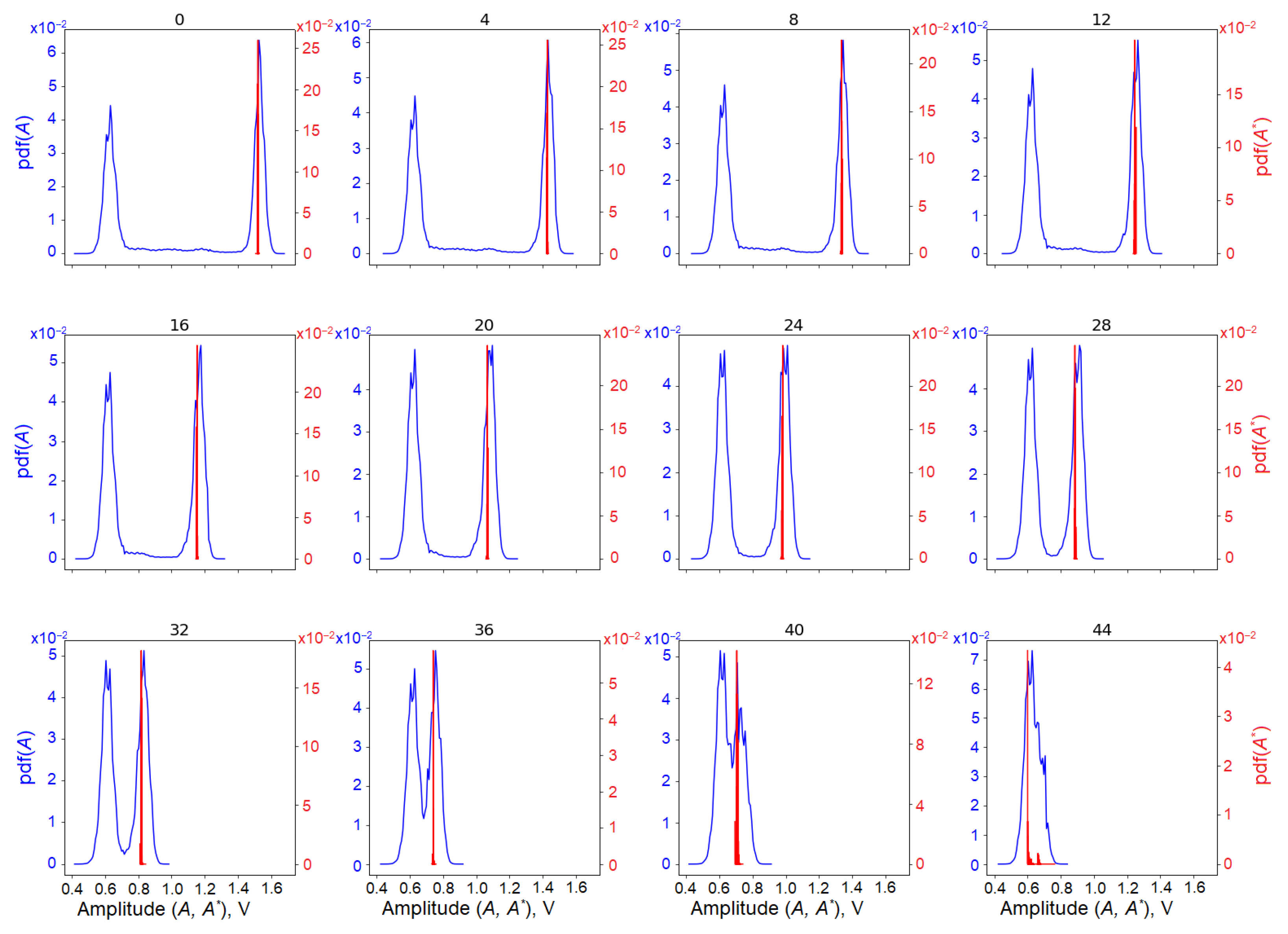
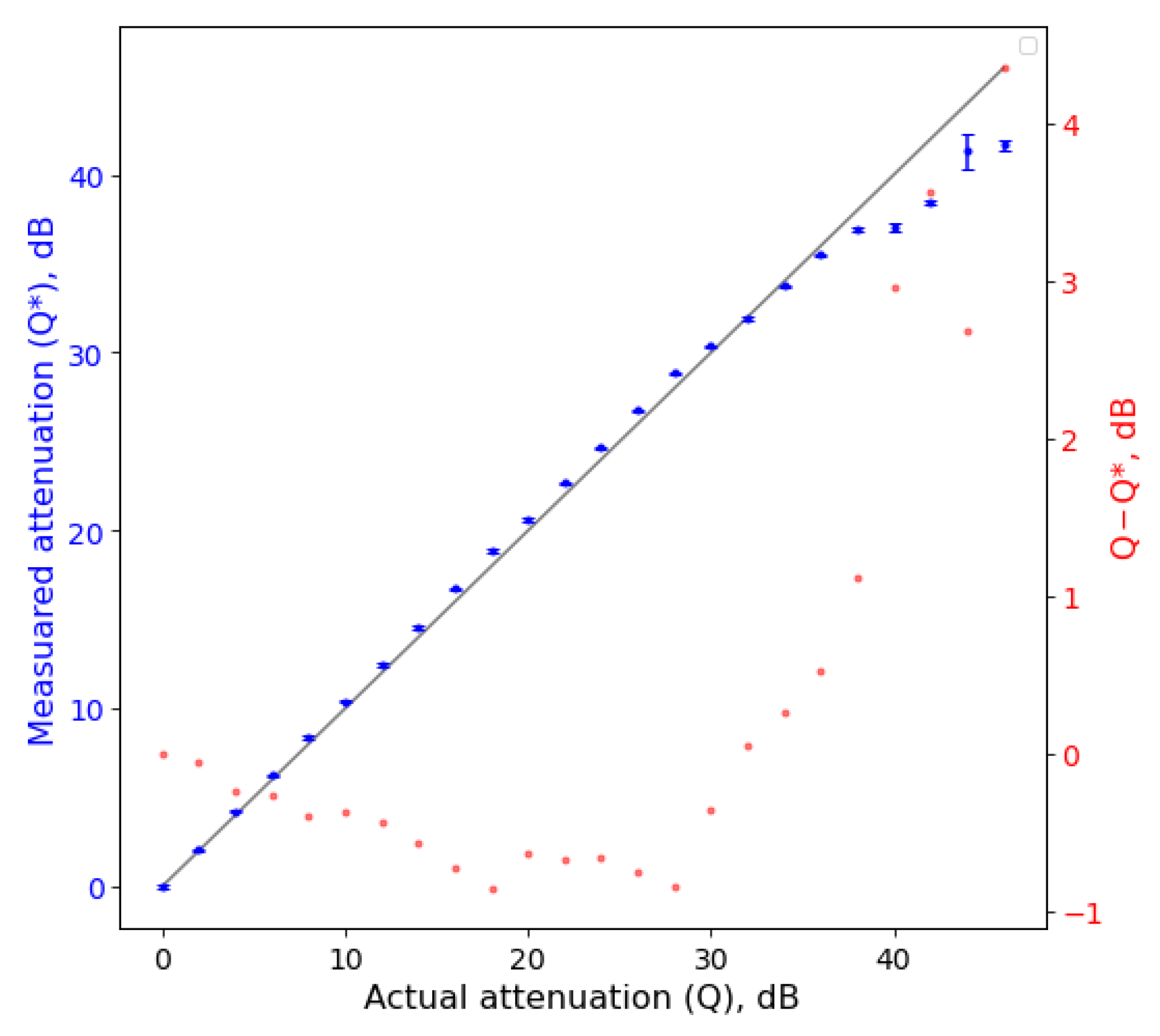
3.1. Measurement of Attenuation of the UWB Chaotic Signal under Stationary Conditions
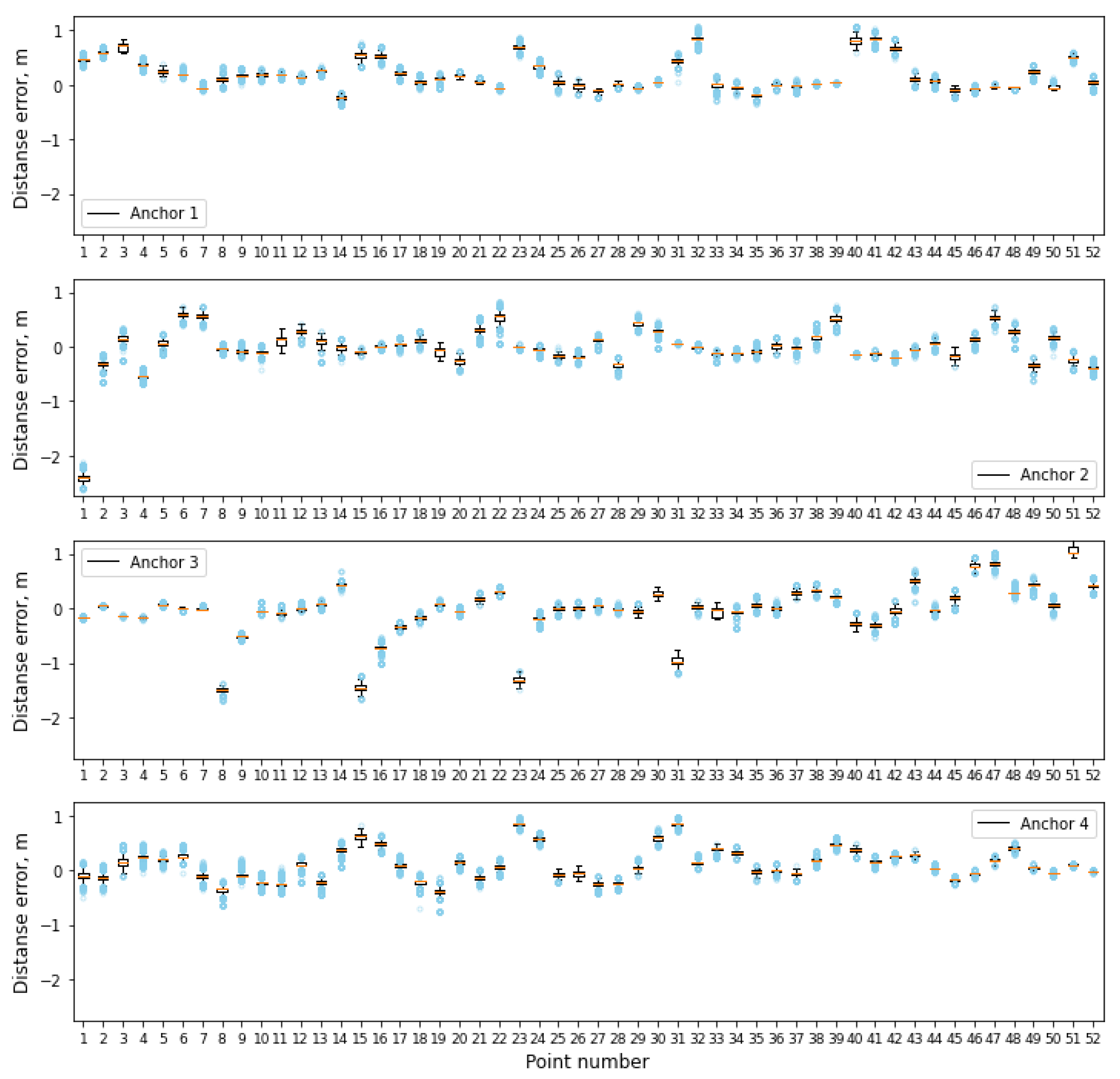
3.2. Distance Measurement in 1D
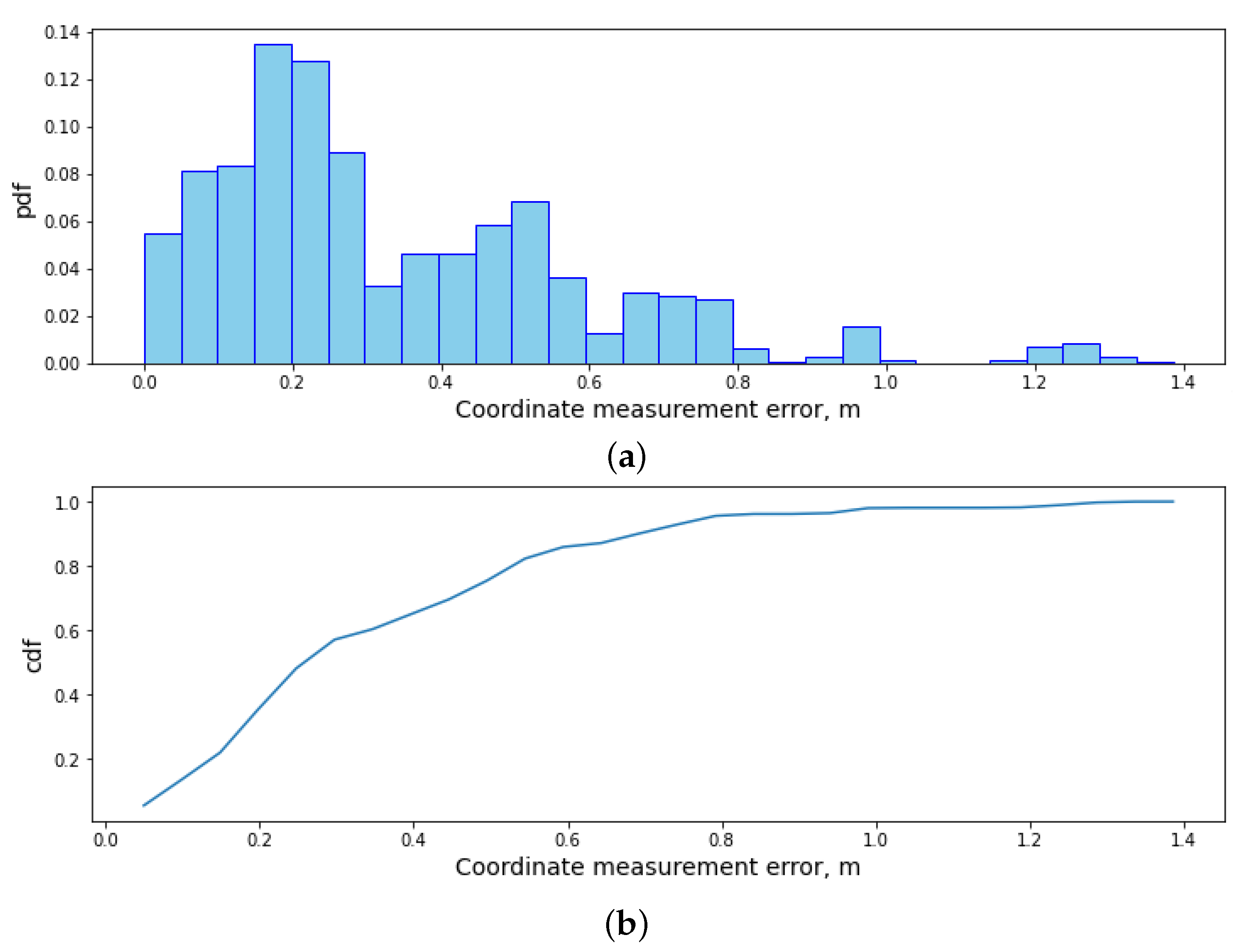
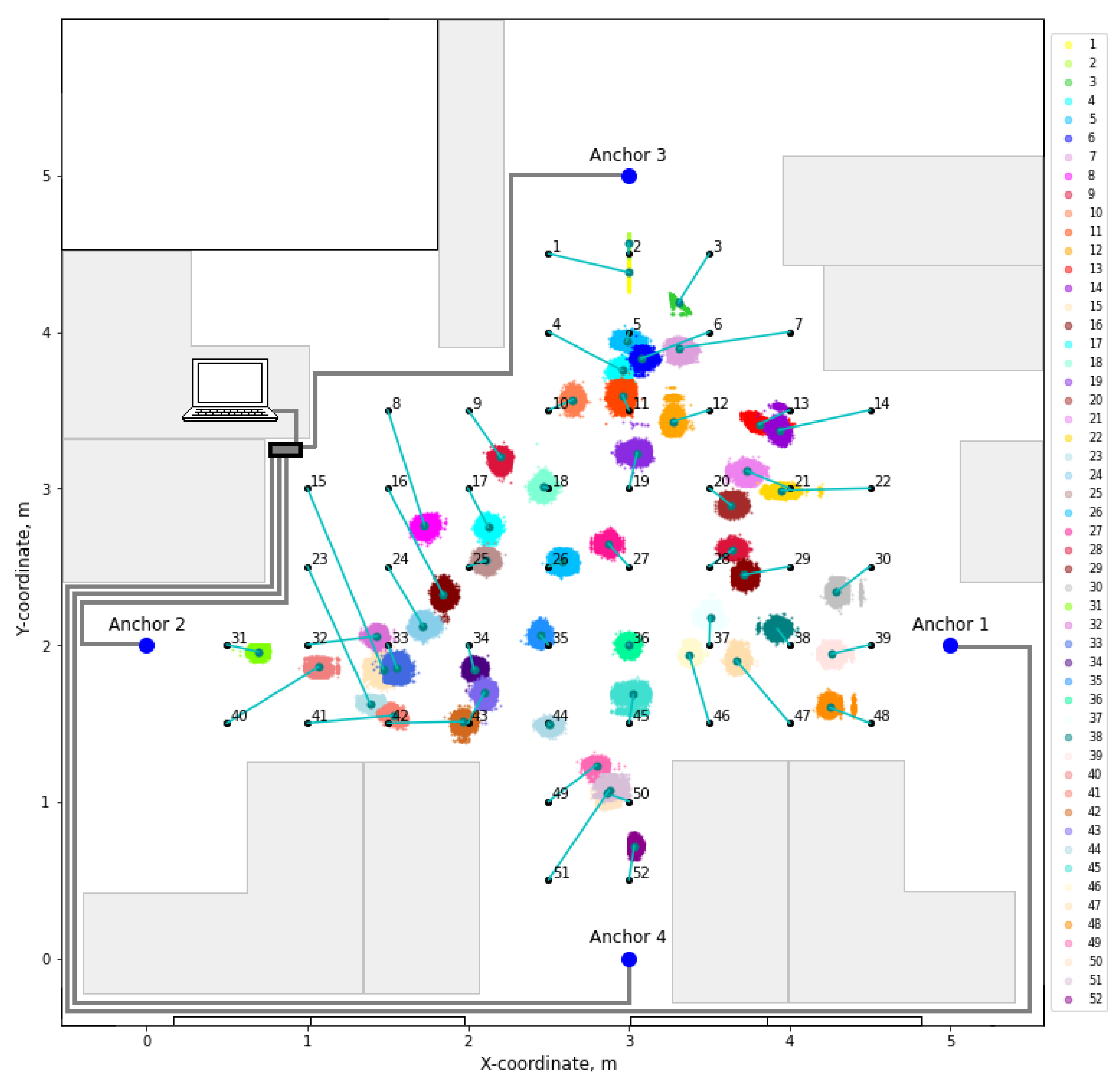
3.3. Two-Dimensional (2D) Positioning Experiment
4. Discussion
5. Conclusions and Future Work
- A new method for measuring the power of UWB chaotic radio pulses transmitted through a wireless communication channel.
- The proposed method for measuring the power of chaotic radio pulses can be integrated into the data transmission process of communication systems based on chaotic radio pulses, since it essentially uses the same signal processing.
- The system is shown to provide stable power measurements under stationary conditions with a standard deviation of 0.24 dBm.
- For the first time, experimental studies have been carried out on the indoor positioning of objects in 2D based on measurements of the power of UWB chaotic radio pulses.
- In a real indoor wireless communication channel, the proposed scheme and its experimental implementation provide an accuracy of cm, which is better than the accuracy of other mass-purpose wireless systems (using signal power measurements) under comparable conditions.
- The presented results can be used as a baseline for further development and research of the positioning methods based on UWB chaotic signals.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADC | Analog-To-Digital Converter |
| AOA | Angle of Arrival |
| DAC | Digital-to-Analog Converter |
| DCC | Direct Chaotic Communication |
| FCC | Federal Communications Commission |
| FPGA | Field-Programmable Gate Array |
| GNSS | Global Navigation Satellite System |
| IEEE | Institute of Electrical and Electronics Engineers |
| LOS | Line of Sight |
| MAE | Mean Absolute Error |
| MedAE | Median Absolute Error |
| MCU | Microcontroller Unit |
| NLOS | Non-Line of Sight |
| OFDM | Orthogonal Frequency Division Multiplexing |
| PC | Personal Computer |
| RF | Radio-Frequency |
| RFID | Radio-Frequency Identification |
| RMSE | Root Mean Squared Error |
| RSS | Received Signal Strength |
| RSSI | Received Signal Strength Indicator |
| SNR | Signal-to-Noise Ratio |
| STD | Standard Deviation |
| TDOA | Time Difference Of Arrival |
| TOA | Time of Arrival |
| TOF | Time of Flight |
| TWR | Two-Way Ranging |
| UWB | Ultra-Wideband |
| USPs | Ultra-Short Pulses |
Appendix A. Symbol Definitions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| A | Signal amplitude |
| Signal amplitude estimate | |
| Estimate of signal amplitude at reference distance | |
| Estimate of signal amplitude at distance d | |
| Coordinate measurement error | |
| Envelope of chaotic radio pulses | |
| D | Duty cycle of radio pulses |
| d | Distance |
| Reference distance | |
| Distance measurement error | |
| Relative distance error | |
| Oscilloscope sampling rate | |
| g | Threshold voltage accuracy |
| h | Slope of logarithmic detector |
| k | Index |
| M | Number of sampling samples |
| 2-level modulation signal in transmitter | |
| 2-level demodulated signal at the comparator output | |
| Binary samples | |
| n | Path loss exponent |
| Number of DAC quantization levels | |
| P | Signal power |
| Signal power estimate | |
| Signal power at reference distance | |
| Signal power at distance d | |
| Average signal power (sequences of chaotic radio pulses) | |
| Average signal power of the chaotic oscillation generator | |
| Q | Attenuation |
| Receiver | |
| Stream of chaotic radio pulses | |
| Attenuator output | |
| Signal at the input of the log detector | |
| T | DAC threshold integer value |
| Radio pulse duration | |
| Transmitter | |
| Minimum voltage value for power measurement | |
| Maximum voltage value for power measurement | |
| DAC supply voltage | |
| Comparator threshold voltage | |
| X-coordinate of the i-th receiver | |
| Estimate of emitter coordinate along the x-axis | |
| Y-coordinate of the i-th receiver | |
| Estimated emitter coordinate along the y-axis |
References
- Sesyuk, A.; Ioannou, S.; Raspopoulos, M. A Survey of 3D Indoor Localization Systems and Technologies. Sensors 2022, 22, 9380. [Google Scholar] [CrossRef]
- Hayward, S.; van Lopik, K.; Hinde, C.; West, A. A Survey of Indoor Location Technologies, Techniques and Applications in Industry. Internet Things 2022, 20, 100608. [Google Scholar] [CrossRef]
- Bourdoux, A.; Barreto, A.N.; van Liempd, B.; de Lima, C.; Dardari, D.; Belot, D.; Lohan, E.S.; Seco-Granados, G.; Sarieddeen, H.; Wymeersch, H.; et al. 6G White Paper on Localization and Sensing. arXiv 2020, arXiv:eess.SY/2006.01779. [Google Scholar] [CrossRef]
- Senevirathna, N.M.; De Silva, O.; Mann, G.K.I.; Gosine, R.G. Asymptotic Gradient Clock Synchronization in Wireless Sensor Networks for UWB Localization. IEEE Sens. J. 2022, 22, 24578–24592. [Google Scholar] [CrossRef]
- Yang, T.; Cabani, A.; Chafouk, H. A Survey of Recent Indoor Localization Scenarios and Methodologies. Sensors 2021, 21, 8086. [Google Scholar] [CrossRef]
- Nessa, A.; Adhikari, B.; Hussain, F.; Fernando, X.N. A Survey of Machine Learning for Indoor Positioning. IEEE Access 2020, 8, 214945–214965. [Google Scholar] [CrossRef]
- Karakusak, M.Z.; Kivrak, H.; Ates, H.F.; Ozdemir, M.K. RSS-Based Wireless LAN Indoor Localization and Tracking Using Deep Architectures. Big Data Cogn. Comput. 2022, 6, 84. [Google Scholar] [CrossRef]
- Nabati, M.; Ghorashi, S.A. A real-time fingerprint-based indoor positioning using deep learning and preceding states. Expert Syst. Appl. 2023, 213, 118889. [Google Scholar] [CrossRef]
- Wang, L.; Shang, S.; Wu, Z. Research on Indoor 3D Positioning Algorithm Based on WiFi Fingerprint. Sensors 2023, 23, 153. [Google Scholar] [CrossRef]
- Guo, X.; Ansari, N.; Hu, F.; Shao, Y.; Elikplim, N.R.; Li, L. A Survey on Fusion-Based Indoor Positioning. IEEE Commun. Surv. Tutor. 2020, 22, 566–594. [Google Scholar] [CrossRef]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A Survey on Indoor Positioning Systems for IoT-Based Applications. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Savić, T.; Vilajosana, X.; Watteyne, T. Constrained Localization: A Survey. IEEE Access 2022, 10, 49297–49321. [Google Scholar] [CrossRef]
- Niemelä, V.; Haapola, J.; Hämäläinen, M.; Iinatti, J. An Ultra Wideband Survey: Global Regulations and Impulse Radio Research Based on Standards. IEEE Commun. Surv. Tutor. 2017, 19, 874–890. [Google Scholar] [CrossRef]
- Breed, G. A Summary of FCC Rules for Ultra Wideband Communications. High Freq. Electron. 2005, 4, 42–44. [Google Scholar]
- Mandke, K.; Nam, H.; Zuniga, C.; Rappaport, T. The Evolution of Ultra Wide Band Radio for Wireless Personal Area Networks. High Freq. Electron. 2003, 2, 22–32. [Google Scholar]
- IEEE 802.15 WPAN High Rate Alternative PHY Task Group 3a (TG3a). Available online: https://www.ieee802.org/15/pub/TG3a_old.html (accessed on 24 October 2023).
- IEEE Std 802.15.4a-2007 (Amendment to IEEE Std 802.15.4-2006); IEEE Standard for Information Technology—Local and Metropolitan Area Networks– Specific Requirements– Part 15.4: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for Low-Rate Wireless Personal Area Networks (WPANs): Amendment 1: Add Alternate PHYs. IEEE: New York City, NY, USA, 2007; pp. 1–210. [CrossRef]
- 802.15.6-2012; IEEE Standard for Local and Metropolitan Area Networks—Part 15.6: Wire-Less Body Area Networks. IEEE: New York City, NY, USA, 2012; pp. 1–271.
- 802.15.4z-2020; IEEE Standard for Low-Rate Wireless Networks–Amendment 1: Enhanced Ultra Wideband (UWB) Physical Layers (PHYs) and Associated Ranging Techniques. IEEE Press: New York City, NY, USA, 2020; Amendment to IEEE Std 802.15.4-2020. pp. 1–174.
- Stocker, M.; Brunner, H.; Schuh, M.; Boano, C.A.; Römer, K. On the Performance of IEEE 802.15.4z-Compliant Ultra-Wideband Devices. In Proceedings of the 2022 Workshop on Benchmarking Cyber-Physical Systems and Internet of Things (CPS-IoTBench), Milan, Italy, 3–6 May 2022; pp. 28–33. [Google Scholar] [CrossRef]
- Chen, H.; Chen, Z.; Ou, R.; Chen, R.; Wu, Z.; Li, B. A 4-to-9GHz IEEE 802.15.4z-Compliant UWB Digital Transmitter with Reconfigurable Pulse-Shaping in 28nm CMOS. In Proceedings of the 2022 IEEE Radio Frequency Integrated Circuits Symposium (RFIC), Denver, CO, USA, 19–21 June 2022; pp. 99–102. [Google Scholar] [CrossRef]
- Agiwal, M.; Roy, A.; Saxena, N. Next Generation 5G Wireless Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2016, 18, 1617–1655. [Google Scholar] [CrossRef]
- Alavi, B.; Pahlavan, K. Studying the effect of bandwidth on performance of uwb positioning systems. In Proceedings of the IEEE Wireless Communications and Networking Conference, WCNC 2006, Las Vegas, NV, USA, 3–6 April 2006; Volume 2, pp. 884–889. [Google Scholar] [CrossRef]
- Bharadwaj, R.; Parini, C.; Alomainy, A. Analytical and Experimental Investigations on Ultrawideband Pulse Width and Shape Effect on the Accuracy of 3-D Localization. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1116–1119. [Google Scholar] [CrossRef]
- Dabove, P.; Di Pietra, V.; Piras, M.; Jabbar, A.A.; Kazim, S.A. Indoor positioning using Ultra-wide band (UWB) technologies: Positioning accuracies and sensors’ performances. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 175–184. [Google Scholar] [CrossRef]
- De Angelis, A.; Dwivedi, S.; Händel, P.; Moschitta, A.; Carbone, P. Ranging results using a UWB platform in an indoor environment. In Proceedings of the 2013 International Conference on Localization and GNSS (ICL-GNSS), Turin, Italy, 25–27 June 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, C.; Kuhn, M.J.; Merkl, B.C.; Fathy, A.E.; Mahfouz, M.R. Real-Time Noncoherent UWB Positioning Radar With Millimeter Range Accuracy: Theory and Experiment. IEEE Trans. Microw. Theory Tech. 2010, 58, 9–20. [Google Scholar] [CrossRef]
- Sahinoglu, Z.; Gezici, S.; Güvenc, I. Ultra-Wideband Positioning Systems: Theoretical Limits, Ranging Algorithms, and Protocols; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Che, F.; Ahmed, Q.Z.; Lazaridis, P.I.; Sureephong, P.; Alade, T. Indoor Positioning System (IPS) Using Ultra-Wide Bandwidth (UWB)—For Industrial Internet of Things (IIoT). Sensors 2023, 23, 5710. [Google Scholar] [CrossRef]
- Molisch, A.; Balakrishnan, K.; Cassioli, D.; Chong, C.; Emami, S.; Fort, A.; Karedal, J.; Kunish, J.; Schantz, H.; Siwiak, K. 802.15.4a Channel Model–Final Report. 2004, pp. 1–40. Available online: https://www.ieee802.org/15/pub/04/15-04-0662-02-004a-channel-model-final-report-r1.pdf (accessed on 24 October 2023).
- Molisch, A.F. Ultra-Wide-Band Propagation Channels. Proc. IEEE 2009, 97, 353–371. [Google Scholar] [CrossRef]
- Zanella, A. Best Practice in RSS Measurements and Ranging. IEEE Commun. Surv. Tutor. 2016, 18, 2662–2686. [Google Scholar] [CrossRef]
- IEEE Std 802.15.4-2015; IEEE Standard for Low-Rate Wireless Networks. IEEE: New York City, NY, USA, 2016; Revision of IEEE Std 802.15.4-2011. pp. 1–709. [CrossRef]
- Zhu, X.; Qu, W.; Qiu, T.; Zhao, L.; Atiquzzaman, M.; Wu, D.O. Indoor Intelligent Fingerprint-Based Localization: Principles, Approaches and Challenges. IEEE Commun. Surv. Tutor. 2020, 22, 2634–2657. [Google Scholar] [CrossRef]
- Yaro, A.S.; Maly, F.; Prazak, P. A Survey of the Performance-Limiting Factors of a 2-Dimensional RSS Fingerprinting-Based Indoor Wireless Localization System. Sensors 2023, 23, 2545. [Google Scholar] [CrossRef]
- Gigl, T.; Janssen, G.J.; Dizdarevic, V.; Witrisal, K.; Irahhauten, Z. Analysis of a UWB Indoor Positioning System Based on Received Signal Strength. In Proceedings of the 2007 4th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 22 March 2007; pp. 97–101. [Google Scholar] [CrossRef]
- Bellusci, G.; Janssen, G.J.M.; Yan, J.; Tiberius, C.C.J.M. Low complexity ultra-wideband ranging in indoor multipath environments. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 394–401. [Google Scholar] [CrossRef]
- Botler, L.; Diwold, K.; Roemer, K. Improving Signal-Strength-Based Distance Estimation in UWB Transceivers. In Proceedings of the Cyber-Physical Systems and Internet of Things Week 2023, San Antonio, TX, USA, 9–12 May 2023; CPS-IoT Week ’23. pp. 61–66. [Google Scholar] [CrossRef]
- Sourya, A.; Dutta, S.; Chandra, A.; Prokes, A.; Kim, M. Find My Car: Simple RSS-based UWB Localization Algorithms for Single and Multiple Transmitters. In Proceedings of the 2020 IEEE Latin-American Conference on Communications (LATINCOM), Santo Domingo, Dominican Republic, 18–20 November 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Barbi, M.; Garcia-Pardo, C.; Nevárez, A.; Pons Beltrán, V.; Cardona, N. UWB RSS-Based Localization for Capsule Endoscopy Using a Multilayer Phantom and In Vivo Measurements. IEEE Trans. Antennas Propag. 2019, 67, 5035–5043. [Google Scholar] [CrossRef]
- Wang, S.; Waadt, A.; Burnic, A.; Xu, D.; Kocks, C.; Bruck, G.H.; Jung, P. System implementation study on RSSI based positioning in UWB networks. In Proceedings of the 2010 7th International Symposium on Wireless Communication Systems, York, UK, 19–22 September 2010; pp. 36–40. [Google Scholar] [CrossRef]
- Ivanov, S.; Kuptsov, V.; Badenko, V.; Fedotov, A. RSS/TDoA-Based Source Localization in Microwave UWB Sensors Networks Using Two Anchor Nodes. Sensors 2022, 22, 3018. [Google Scholar] [CrossRef] [PubMed]
- Chong, A.M.S.; Yeo, B.C.; Lim, W.S. Integration of UWB RSS to Wi-Fi RSS fingerprinting-based indoor positioning system. Cogent Eng. 2022, 9, 2087364. [Google Scholar] [CrossRef]
- Alonge, F.; Branciforte, M.; Motta, F. A Novel Method of Distance Measurement Based on Pulse Position Modulation and Synchronization of Chaotic Signals Using Ultrasonic Radar Systems. IEEE Trans. Instrum. Meas. 2009, 58, 318–329. [Google Scholar] [CrossRef]
- Corron, N.J.; Stahl, M.T.; Chase Harrison, R.; Blakely, J.N. Acoustic detection and ranging using solvable chaos. Chaos Interdiscip. J. Nonlinear Sci. 2013, 23, 023119. [Google Scholar] [CrossRef]
- Beal, A.N.; Cohen, S.D.; Syed, T.M. Generating and Detecting Solvable Chaos at Radio Frequencies with Consideration to Multi-User Ranging. Sensors 2020, 20, 774. [Google Scholar] [CrossRef]
- Zhang, M.; Ji, Y.; Zhang, Y.; Wu, Y.; Xu, H.; Xu, W. Remote Radar Based on Chaos Generation and Radio Over Fiber. IEEE Photonics J. 2014, 6, 1–12. [Google Scholar] [CrossRef]
- Wang, B.; Xie, R.; Xu, H.; Zhang, J.; Han, H.; Zhang, Z.; Liu, L.; Li, J. Target Localization and Tracking Using an Ultra-Wideband Chaotic Radar With Wireless Synchronization Command. IEEE Access 2021, 9, 2890–2899. [Google Scholar] [CrossRef]
- Liu, L.; Ma, R.X.; Xu, H.; Wang, W.K.; Wang, B.J.; Li, J.X. Experimental investigation of a UWB direct chaotic through-wall imaging radar using colpitts oscillator. In Proceedings of the IET International Radar Conference 2015, Hangzhou, China, 14–16 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Lee, S.Y.; Yang, W.C. A Non-coherent UWB Direct Chaotic Indoor Positioning System using Fuzzy Logic Algorithm. In Proceedings of the 9th International Conference on Advanced Communication Technology, Phoenix Park, Republic of Korea, 12–14 February 2007; Volume 3, pp. 2021–2025. [Google Scholar] [CrossRef]
- Andreyev, Y.V.; Dmitriev, A.S.; Efremova, E.V.; Khilinsky, A.D.; Kuzmin, L.V. Qualitative theory of dynamical systems, chaos and contemporary wireless communications. Int. J. Bifurc. Chaos 2005, 15, 3639–3651. [Google Scholar] [CrossRef]
- Dmitriev, A.S.; Gerasimov, M.Y.; Itskov, V.V.; Lazarev, V.A.; Popov, M.G.; Ryzhov, A.I. Active wireless ultrawideband networks based on chaotic radio pulses. J. Commun. Technol. Electron. 2017, 62, 380–388. [Google Scholar] [CrossRef]
- Dmitriev, A.S.; Kuzmin, L.V.; Lazarev, V.A.; Ryshov, A.I.; Andreyev, Y.V.; Popov, M.G. Self-organizing ultrawideband wireless sensor network. In Proceedings of the 2017 Systems of Signal Synchronization, Generating and Processing in Telecommunications (SINKHROINFO), Kazan, Russia, 3–4 July 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Efremova, E.V.; Dmitriev, A.S.; Kuzmin, L.V. Measuring the Distance between an Emitter and a Receiver in the Wireless Communication Channel by Ultrawideband Chaotic Radio Pulses. Tech. Phys. Lett. 2019, 45, 853–857. [Google Scholar] [CrossRef]
- Efremova, E.V.; Kuzmin, L.V. Measurement of the Ultrawideband Chaotic Signal Power for Wireless Ranging and Positioning. Tech. Phys. Lett. 2021, 47, 494–498. [Google Scholar] [CrossRef]
- Kuzmin, L.V.; Efremova, E.V. Experimental Estimation of the Propagation Time of Chaotic Ultra-Wide-Band RF Pulses through Multipath Channel. Tech. Phys. Lett. 2020, 46, 803–807. [Google Scholar] [CrossRef]
- Kuzmin, L.V.; Grinevich, A.V.; Ushakov, M.D. An Experimental Investigation of the Multipath Propagation of Chaotic Radio Pulses in a Wireless Channel. Tech. Phys. Lett. 2018, 44, 726–729. [Google Scholar] [CrossRef]
- Kuz’min, L.V.; Grinevich, A.V. Method of Blind Detection of Ultrawideband Chaotic Radio Pulses on the Background of Interpulse Interference. Tech. Phys. Lett. 2019, 45, 831–834. [Google Scholar] [CrossRef]
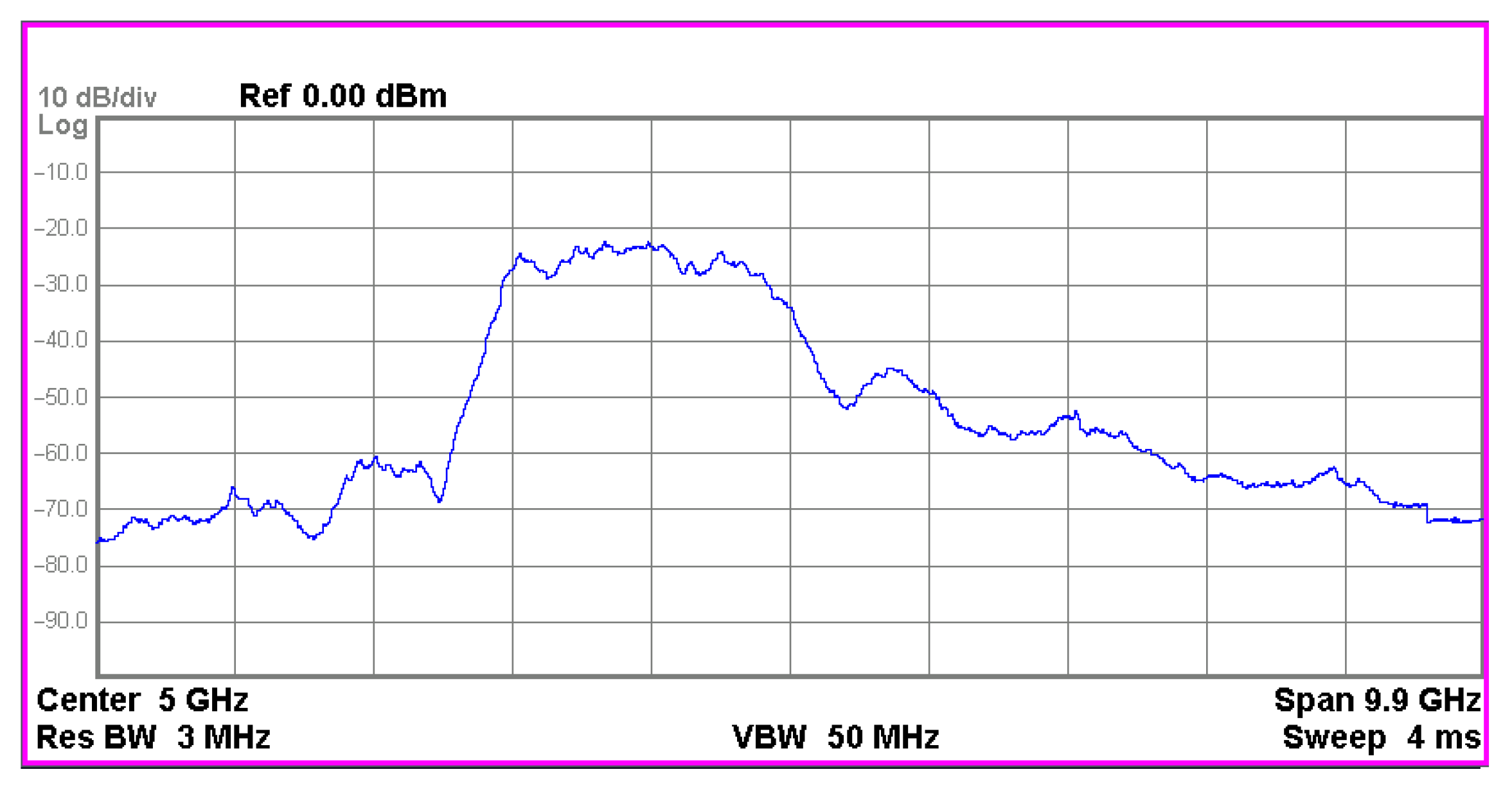
- Dmitriev, A.; Efremova, E.; Rumyantsev, N. A microwave chaos generator with a flat envelope of the power spectrum in the range of 3–8 GHz. Tech. Phys. Lett. 2014, 40, 48–51. [Google Scholar] [CrossRef]
- Kwon, D.H.; Kim, Y.; Chubinsky, N. A printed dipole UWB antenna with GPS frequency notch function. In Proceedings of the 2005 IEEE Antennas and Propagation Society International Symposium, Washington, DC, USA, 3–8 July 2005; Volume 3A, pp. 520–523. [Google Scholar] [CrossRef]
- 1MHz to 4 GHz, 80 dB. Logarithmic Detector/Control er. Data Sheet. ADL5513. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/adl5513.pdf (accessed on 24 October 2023).
- Efremova, E.; Dmitriev, A.; Kuzmin, L.; Petrosyan, M. Wireless distance measurement by means of ultra-wideband chaotic radio pulses. ITM Web Conf. 2019, 30, 12005. [Google Scholar] [CrossRef]
- Goldoni, E.; Savioli, A.; Risi, M.; Gamba, P. Experimental analysis of RSSI-based indoor localization with IEEE 802.15.4. In Proceedings of the 2010 European Wireless Conference (EW), Lucca, Italy, 12–15 April 2010; pp. 71–77. [Google Scholar] [CrossRef]
- Wattananavin, T.; Sengchuai, K.; Jindapetch, N.; Booranawong, A. A Comparative Study of RSSI-Based Localization Methods: RSSI Variation Caused by Human Presence and Movement. Sens. Imaging 2020, 21, 31. [Google Scholar] [CrossRef]
- Sklar, B. Digital Communications: Fundamentals and Applications; Prentice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Miller, L.E. Why UWB, a Review of Ultrawideband Technology; Technical Report; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2003. [Google Scholar]
- Andreev, Y.; Dmitriev, A.; Kletsov, A. Amplification of chaotic pulses in a multipath environment. J. Commun. Technol. Electron. 2007, 52, 779–787. [Google Scholar] [CrossRef]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization With the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]



| MAE | MedAE | STD | RMSE | 90% of AE Is Less Than | |
|---|---|---|---|---|---|
| Ranging error, m | 0.25 | 0.16 | 0.30 | 0.39 | 0.59 |
| Relative ranging error | 0.09 | 0.07 | 0.09 | 0.13 | 0.22 |
| Positioning error, m | 0.34 | 0.26 | 0.25 | 0.42 | 0.69 |
| MAE | MedAE | STD | RMSE | 90% of AE Is Less Than | |
|---|---|---|---|---|---|
| Antenna in XZ plane | |||||
| Ranging error, m | 0.29 | 0.21 | 0.27 | 0.39 | 0.59 |
| Relative ranging error | 0.11 | 0.09 | 0.09 | 0.15 | 0.24 |
| Positioning error, m | 0.34 | 0.26 | 0.26 | 0.42 | 0.63 |
| Antenna in YZ plane | |||||
| Ranging error, m | 0.32 | 0.24 | 0.29 | 0.43 | 0.66 |
| Relative ranging error | 0.13 | 0.10 | 0.11 | 0.16 | 0.25 |
| Positioning error, m | 0.37 | 0.33 | 0.27 | 0.46 | 0.70 |
| Ref. | Technology | Room Size | Distance b/w | MAE | 90% of AE |
|---|---|---|---|---|---|
| the Anchors, m | Is Less Than | ||||
| [69] | WiFi | 10.8 m × 7.3 m | 1–5 | 0.843 | |
| 5.6 m × 5.9 m | 1–5 | 0.486 | |||
| [69] | BLE | 10.8 m × 7.3 m | 1–5 | 0.661 | |
| 5.6 m × 5.9 m | 1–5 | 0.844 | |||
| [69] | ZigBee | 10.8 m × 7.3 m | 1–5 | 0.882 | |
| 5.6 m × 5.9 m | 1–5 | 0.911 | |||
| [69] | LoRaWAN | 10.8 m × 7.3 m | 1–5 | 0.846 | |
| 5.6 m × 5.9 m | 1–5 | 1.534 | |||
| [65] | CC2500 RF | 3.6 m × 6.2 m | 1.04–1.52 | ||
| (test area) | |||||
| 4.0 m × 2.8 m | 0.53 | ||||
| (test area) | |||||
| [37] | UWB USP | 3–10 | 1.5 | ||
| This | UWB Chaotic | 6 m × 6.5 m | |||
| work | Radio | 5 m × 5 m | 5 | 0.34–0.37 | 0.7 |
| Pulses | (test area) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Efremova, E.V.; Kuzmin, L.V.; Itskov, V.V. Measuring Received Signal Strength of UWB Chaotic Radio Pulses for Ranging and Positioning. Electronics 2023, 12, 4425. https://doi.org/10.3390/electronics12214425
Efremova EV, Kuzmin LV, Itskov VV. Measuring Received Signal Strength of UWB Chaotic Radio Pulses for Ranging and Positioning. Electronics. 2023; 12(21):4425. https://doi.org/10.3390/electronics12214425
Chicago/Turabian StyleEfremova, Elena V., Lev V. Kuzmin, and Vadim V. Itskov. 2023. "Measuring Received Signal Strength of UWB Chaotic Radio Pulses for Ranging and Positioning" Electronics 12, no. 21: 4425. https://doi.org/10.3390/electronics12214425