
An Application Study of Improved Iris Image Localization Based on an Evolutionary Algorithm


Abstract
:1. Introduction
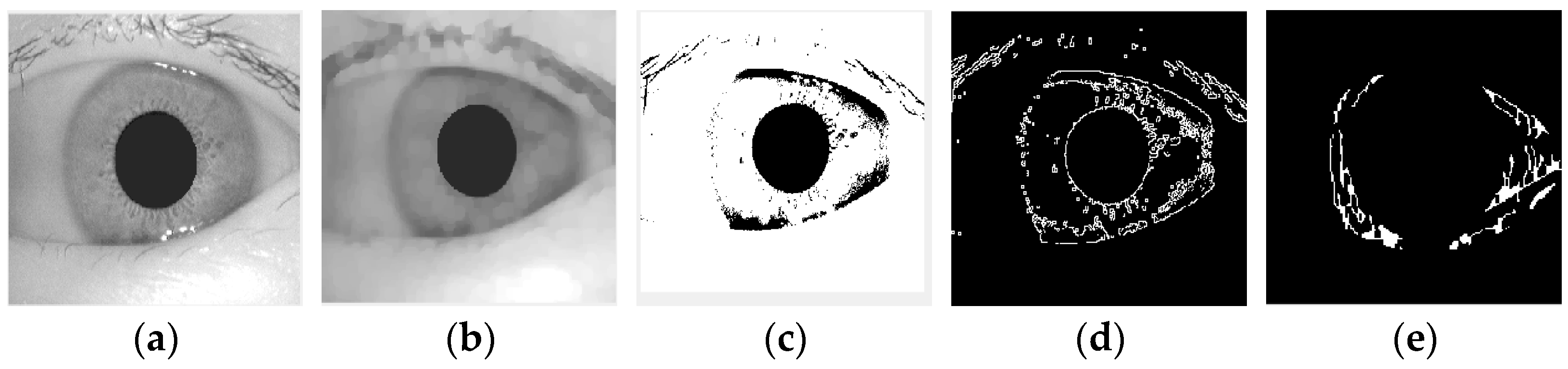
2. Iris Image Pre-Processing
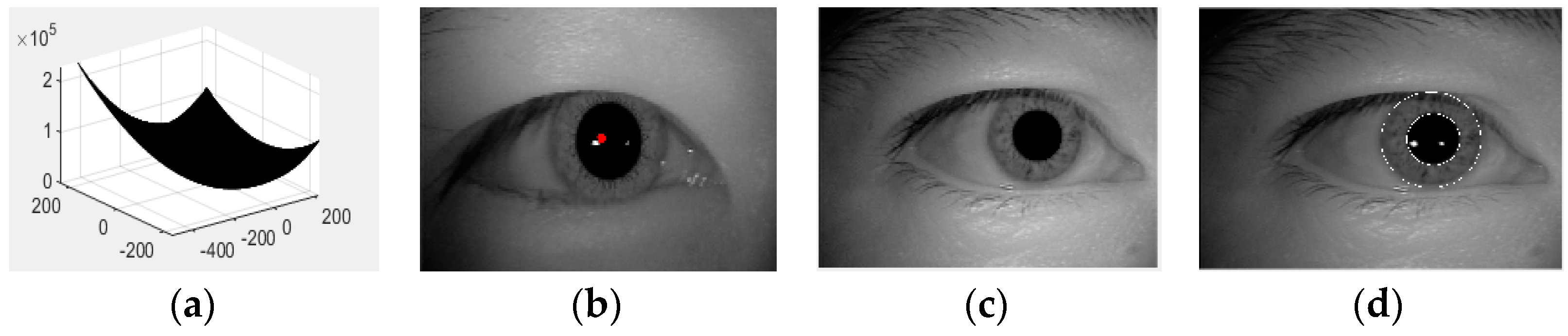
3. Analysis and Simulation of Iris Localization Algorithm with Hough Transform and Particle Swarm Algorithm
3.1. Hough Transform Fitting the Inner and Outer Circles of the Iris
3.2. Particle Swarm Algorithm to Locate Inner and Outer Iris Circles Analysis and Simulation
3.3. Conclusion of the Experiment
4. Particle Swarm Optimization Algorithm Improvement
4.1. LinWPSO
4.2. RandWPSO
4.3. SAPSO
4.4. LnCPSO
4.5. AsyLCPSO
4.6. Shrinkage Factor Method
4.7. Conclusion of the Experiment
5. Introduction of Simulated Annealing Mechanism and Ant Colony Algorithm
5.1. Particle Swarm Algorithm Combined with Ant Colony Algorithm
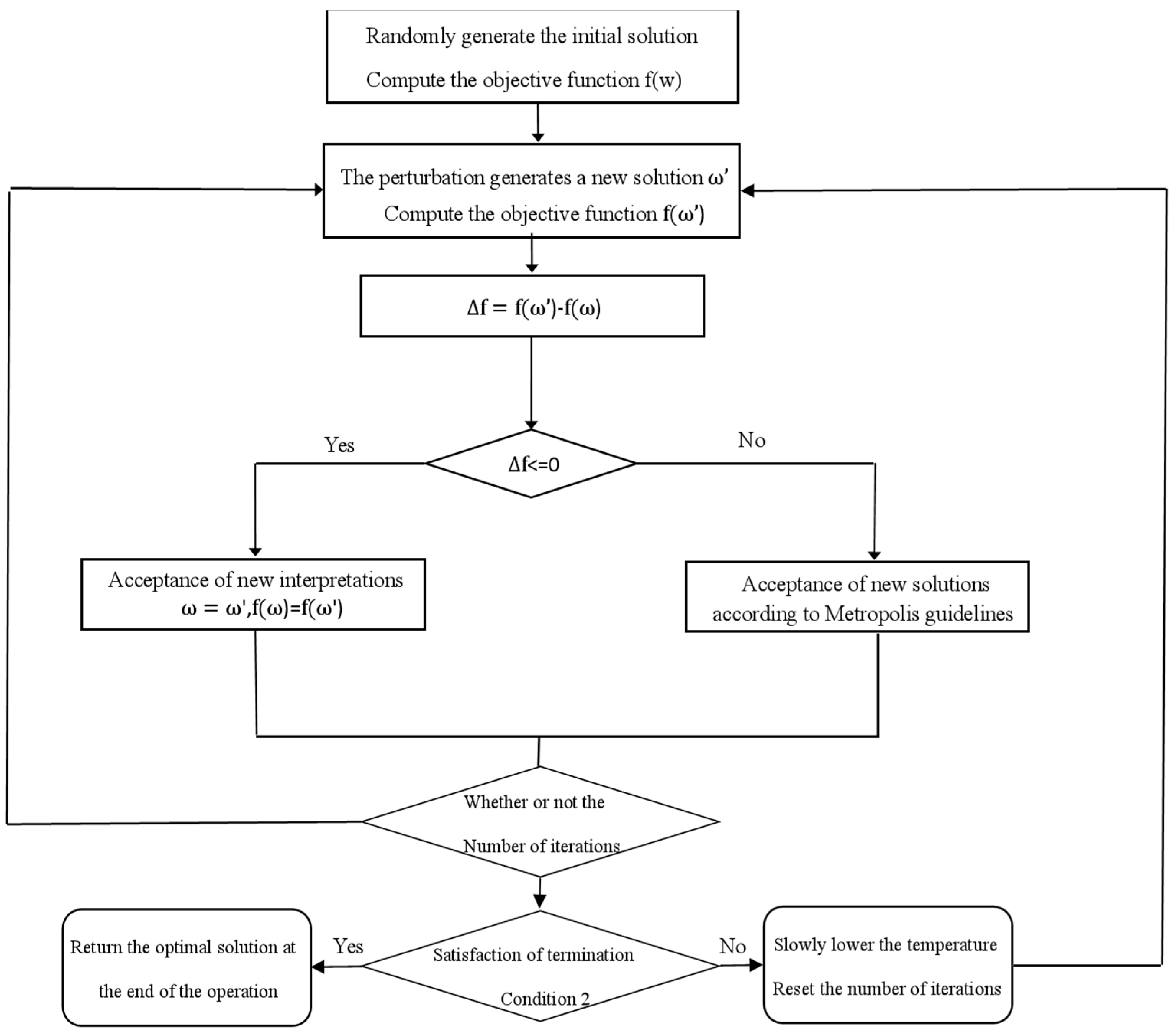
5.2. Introduction of a Simulated Annealing Mechanism
6. Discussion
- A novel multi-method improvement framework is proposed for iris image localization.
- Avoiding falling into local optimality is a difficult problem that heuristic algorithms need to address. Although there are various improved particle swarm optimization (PSO) algorithms, they are only used for function-specific test experiments and fail to find optimal solutions for all test functions. This study further advances the theoretical study of the algorithm by applying it to the localization of iris inner and outer circle fitting in practical engineering.
- We tried various methods, including the Hough transform, particle swarm optimization algorithm, and combinations of LinWPSO, RandWPSO, shrinkage factor, LnCPSO, and AsyLnCPSO. In addition, by applying the simulated annealing algorithm and the ant colony algorithm, we improved the particle swarm optimization algorithm to different degrees. Finally, based on the theoretical support, we successfully solved the inaccuracy problem of the particle swarm optimization algorithm in inner and outer iris circle localization, and constructed a more efficient iris localization algorithm and system architecture.
- Comprehensive experiments are conducted to evaluate and verify the effectiveness and superiority of our method.
- Demonstrate the improved accuracy and robustness of iris image localization for real-world application scenarios.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Daugman, J. Recognising Persons by Their Iris Patterns. In SINOBIOMETRICS 2004: Advances in Biometric Person Authentication, Proceedings of the 5th Chinese Conference on Biometric Recognition, SINOBIOMETRICS 2004, Guangzhou, China, 13–14 December 2004; Li, S.Z., Lai, J., Tan, T., Feng, G., Wang, Y., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2004; Volume 3338, p. 3338. [Google Scholar] [CrossRef]
- Daugman, J. How iris recognition works. In Proceedings of the International Conference on Image Processing, Rochester, NY, USA, 22–25 September 2002. [Google Scholar] [CrossRef]
- Roy, D.A.; Soni, U.S. IRIS segmentation using Daughman’s method. In Proceedings of the 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, India, 3–5 March 2016; pp. 2668–2676. [Google Scholar] [CrossRef]
- Li, J.; Feng, X. Double-Center-Based Iris Localization and Segmentation in Cooperative Environment with Visible Illumination. Sensors 2023, 23, 2238. [Google Scholar] [CrossRef] [PubMed]
- Baek, S.-J.; Choi, K.-A.; Ma, C.; Kim, Y.-H.; Ko, S.-J. Eyeball model-based iris center localization for visible image-based eye-gaze tracking systems. IEEE Trans. Consum. Electron. 2013, 59, 415–421. [Google Scholar] [CrossRef]
- Wang, N.; Li, Q.; Abd El-Latif, A.A.; Zhang, T.; Niu, X. Toward accurate localization and high recognition performance for noisy iris images. Multimed. Tools Appl. 2014, 71, 1411–1430. [Google Scholar] [CrossRef]
- Radman, A.; Jumari, K.; Zainal, N. Fast and reliable iris segmentation algorithm. IET Image Process. 2013, 7, 42–49. [Google Scholar] [CrossRef]
- Wang, L.; Yang, G.; Yin, Y. Fast Iris Localization Based on Improved Hough Transform. In Rough Set and Knowledge Technology, Proceedings of the 5th International Conference, RSKT 2010, Beijing, China, 15–17 October 2010; Yu, J., Greco, S., Lingras, P., Wang, G., Skowron, A., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6401, p. 6401. [Google Scholar] [CrossRef]
- Nachar, R.; Inaty, E. An effective segmentation method for iris recognition based on fuzzy logic using visible feature points. Multimed. Tools Appl. 2022, 81, 9803–9828. [Google Scholar] [CrossRef]
- Bozomitu, R.G.; Păsărică, A.; Cehan, V.; Rotariu, C.; Barabaşa, C. Pupil centre coordinates detection using the circular Hough transform technique. In Proceedings of the 2015 38th International Spring Seminar on Electronics Technology (ISSE), Eger, Hungary, 6–10 May 2015; pp. 462–465. [Google Scholar] [CrossRef]
- Bakshi, S.; Mehrotra, H.; Majhi, B. Real-time iris segmentation based on image morphology. In Proceedings of the ICCCS ’11, 2011 International Conference on Communication, Computing & Security, Rourkela, India, 12–14 February 2011; pp. 335–338. [Google Scholar] [CrossRef]
- Kumar, V.; Asati, A.; Gupta, A. Iris localization based on integro-differential operator for unconstrained infrared iris images. In Proceedings of the 2015 International Conference on Signal Processing, Computing and Control (ISPCC), Waknaghat, India, 24–26 September 2015; pp. 277–281. [Google Scholar] [CrossRef]
- Lee, Y.W.; Park, K.R. Recent Iris and Ocular Recognition Methods in High- and Low-Resolution Images: A Survey. Mathematics 2022, 10, 2063. [Google Scholar] [CrossRef]
- Rodríguez, J.L.G.; Rubio, Y.D. A New Method for Iris Pupil Contour Delimitation and Its Application in Iris Texture Parameter Estimation. In Progress in Pattern Recognition, Image Analysis and Applications, Proceedings of the 10th Iberoamerican Congress on Pattern Recognition, CIARP 2005, Havana, Cuba, 15–18 November 2005; Sanfeliu, A., Cortés, M.L., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3773. [Google Scholar] [CrossRef]
- Sardar, M.; Mitra, S.; Shankar, B.U. Iris Lo-calization Using Rough Entropy and CSA: A Soft Computing Approach. Appl. Soft Comput. 2018, 67, 61–69. [Google Scholar] [CrossRef]
- Wang, B.Q.; Zhang, L. Fast and Effective Algorithm of Iris Localization Based on Hough Transform. Appl. Mech. Mater. 2014, 519–520, 788–793. [Google Scholar] [CrossRef]
- Rajesh, B.M.; Sanjay, T.N. Segmentation for Iris Localisation: A Novel Approach Suitable for Fake Iris Detection. In Pattern Recognition and Machine Intelligence, Proceedings of the Third International Conference, PReMI 2009, New Delhi, India, 16–20 December 2009; Chaudhury, S., Mitra, S., Murthy, C.A., Sastry, P.S., Pal, S.K., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5909. [Google Scholar] [CrossRef]
- Othman, Z.; Abdullah, A.; Kasmin, F.; Ahmad, S.S.S. Effect of Supervised Region of Interest Against Edge Detection Method for Iris Localisation. In Intelligent and Interactive Computing: Proceedings of IIC 2018; Piuri, V., Balas, V., Borah, S., Syed Ahmad, S., Eds.; Lecture Notes in Networks and Systems; Springer: Singapore, 2019; Volume 67. [Google Scholar] [CrossRef]
- Ma, L.; Li, H.F.; Yu, K.P. Fast Iris Localization Algorithm on Noisy Images Based on Conformal Geometric Algebra. Digit. Signal Process. 2020, 100, 102682. [Google Scholar] [CrossRef]
- He, X.; Yan, J.; Chen, G.; Shi, P. Contactless Autofeedback Iris Capture Design. IEEE Trans. Instrum. Meas. 2008, 57, 1369–1375. [Google Scholar] [CrossRef]
- Si, Y.; Mei, J.; Gao, H. Novel Approaches to Improve Robustness, Accuracy and Rapidity of Iris Recognition Systems. IEEE Trans. Ind. Inform. 2012, 8, 110–117. [Google Scholar] [CrossRef]
- Zhang, W.C.; Li, B.; Ye, X.Y.; Zhuang, Z.Q.; Wang, K.Q. A robust iris localization algorithm via radial symmetry for nonideal capturing condition. Int. J. Pattern Recognit. Artif. Intell. 2009, 23, 45–57. [Google Scholar] [CrossRef]
- Zhang, S.; Huang, H.; Huang, Y.; Cheng, D.; Huang, J. A GA and SVM Classification Model for Pine Wilt Disease Detection Using UAV-Based Hyperspectral Imagery. Appl. Sci. 2022, 12, 6676. [Google Scholar] [CrossRef]
- Liu, B.; Wu, H.; Wang, Y.; Liu, W. Main road extraction from zy-3 grayscale imagery based on directional mathematical morphology and vgi prior knowledge in urban areas. PLoS ONE 2015, 10, e0138071. [Google Scholar] [CrossRef]
- Illingworth, J.; Kittler, J. A survey of the Hough transform. Comput. Vis. Graph. Image Process. 1988, 44, 87–116. [Google Scholar] [CrossRef]
- Nikolaev, D.P.; Karpenko, S.M.; Nikolaev, I.P.; Nikolayev, P.P. Hough transform: Underestimated tool in the computer vision field. In Proceedings of the 22nd European Conference on Modelling and Simulation, Nicosia, Cyprus, 3–6 June 2008; Volume 238, p. 246. [Google Scholar]
- Yoshikawa, T.; Premachandra, C. Pedestrian Crossing Sensing Based on Hough Space Analysis to Support Visually Impaired Pedestrians. Sensors 2023, 23, 5928. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings. IEEE World Congress on Computational Intelligence (Cat. No.98TH8360), Anchorage, AK, USA, 4–9 May 1998; IEEE: Piscataway, NJ, USA, 1998; pp. 69–73. [Google Scholar] [CrossRef]
- Bai, Q. Analysis of particle swarm optimization algorithm. Comput. Inf. Sci. 2010, 3, 180. [Google Scholar] [CrossRef]
- Cheng, C.; Sha, Q.; He, B.; Li, G. Path planning and obstacle avoidance for AUV: A review. Ocean Eng. 2021, 235, 109355. [Google Scholar] [CrossRef]
- Shuang, B.; Chen, J.; Li, Z. Study on hybrid PS-ACO algorithm. Appl. Intell. 2011, 34, 64–73. [Google Scholar] [CrossRef]
- Romeo, F.; Sangiovanni-Vincentelli, A. A theoretical framework for simulated annealing. Algorithmica 1991, 6, 302–345. [Google Scholar] [CrossRef]
- Kirkpatrick, S. Optimization by simulated annealing: Quantitative studies. J. Stat. Phys. 1984, 34, 975–986. [Google Scholar] [CrossRef]
- Yang, B.; Wang, J.; Zhang, X.; Yu, T.; Yao, W.; Shu, H.; Zeng, F.; Sun, L. Comprehensive overview of meta-heuristic algorithm applications on PV cell parameter identification. Energy Convers. Manag. 2020, 208, 112595. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Use of Algorithms (Image Selection) | Average Time for Internal Circle Positioning | Average Time for Cylindrical Positioning | Success Rate |
|---|---|---|---|
| Hough transform (CASIA-Iris-Syn) | 0.088 s | 2.302 s | 89% |
| Hough transform (KS2A17) | 0.150 s | 5.581 s | 87% |
| Particle swarm algorithm (CASIA-Iris-Syn) | 0.047 s | 0.738 s | 46% |
| Particle swarm algorithm (KS2A17) | 0.050 s | 0.579 s | 53% |
| Use of Algorithms (Image Selection) | Average Time for Internal Circle Positioning | Average Time for Cylindrical Positioning | Success Rate | Scale Up |
|---|---|---|---|---|
| LinWPSO | 0.064 s | 0.777 s | 60.5% | 14.4% |
| Shrinkage factor method 2 | 0.0544 s | 0.5489 s | 53.4% | 7.3% |
| LnCPSO | 0.0540 s | 0.6235 s | 52.7% | 6.6% |
| AsyLnCPSO | 0.0614 s | 0.5394 s | 56.3% | 10.2% |
| RandWPSO | 0.0513 s | 0.6533 s | 52.4% | 5.2% |
| SAPSO | 0.0716 s | 0.5474 s | 51.6% | 4.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niu, S.; Nie, Z.; Liu, J.; Chu, M. An Application Study of Improved Iris Image Localization Based on an Evolutionary Algorithm. Electronics 2023, 12, 4454. https://doi.org/10.3390/electronics12214454
Niu S, Nie Z, Liu J, Chu M. An Application Study of Improved Iris Image Localization Based on an Evolutionary Algorithm. Electronics. 2023; 12(21):4454. https://doi.org/10.3390/electronics12214454
Chicago/Turabian StyleNiu, Shanwei, Zhigang Nie, Jiayu Liu, and Mingcao Chu. 2023. "An Application Study of Improved Iris Image Localization Based on an Evolutionary Algorithm" Electronics 12, no. 21: 4454. https://doi.org/10.3390/electronics12214454
APA StyleNiu, S., Nie, Z., Liu, J., & Chu, M. (2023). An Application Study of Improved Iris Image Localization Based on an Evolutionary Algorithm. Electronics, 12(21), 4454. https://doi.org/10.3390/electronics12214454