
Autonomous Vehicle Emergency Obstacle Avoidance Maneuver Framework at Highway Speeds



Abstract
:1. Introduction
2. Materials and Methods
2.1. Overall EOAM Framework Goals and System Description
- Understand and recognize World Model conditions that require an EOAM. This includes the ego AV states and ARO (active road object) relative states;
- Create and utilize decision-making logic that allows the AV to know what type of maneuver to perform and precisely when to perform it, based on the current environmental conditions, known vehicle traits, and current on-road activity, including the states of the object(s) that must be avoided (the ARO);
- Through AV actuator (steering, throttle, brake) control, perform the safest emergency maneuver based on environmental, AV, and ARO states;
- Determine if current conditions are necessary for an EOAM, using the decision-making module (DMM) phase;
- When a lane change is required, utilize 3D lookup tables that were computed offline to determine the vehicle’s desired longitudinal acceleration and steering input through the maneuver;
- Utilize steering and longitudinal acceleration controllers to assure that the maneuver is robust enough to be completed as prescribed;
- Monitor the AV’s lateral position for a point of no return;
- Provide a specified time-based duration for the entire lane change maneuver to complete that allows the AV to reach a stable final position;
- After the maneuver is completed, return to the original lane of travel and hand control back to the AV high-level system controller.
- NORMAL: the high-level AV system is in control as traffic conditions do not require EOAM intervention;
- UPDATE, BRAKE: EOAM intervention with occupant warning is required with pure braking; no oncoming vehicle is detected;
- UPDATE, STEER + BRAKE: an EOAM lane change maneuver with occupant warning, known geometric path, and longitudinal acceleration profile is required; no oncoming vehicle is detected;
- ONCOMING, BRAKE: an oncoming vehicle is detected at the time of either (1) or (2), but before the AV reaches the lateral point of no return, so limit braking should be conducted;
- ONCOMING, STEER + BRAKE: an oncoming vehicle is detected at the time of either (1) or (2) and after the AV reaches the lateral point of no return, so the lane change maneuver should continue so that the AV avoids an offset/oblique collision with the first ARO; once the AV reaches the desired position in the next lane, it should immediately return to the original lane to ideally avoid the detected oncoming traffic. After the AV returns to the desired lane position in the original lane, it should hand control back over to the high-level AV system;
- RETURN: The AV has completed (2) or the AV has reached the desired lane position after (4) occurred, so it should return to the original lane. After the AV returns to the desired lane position in the original lane, it should hand control back over to the high-level AV system.
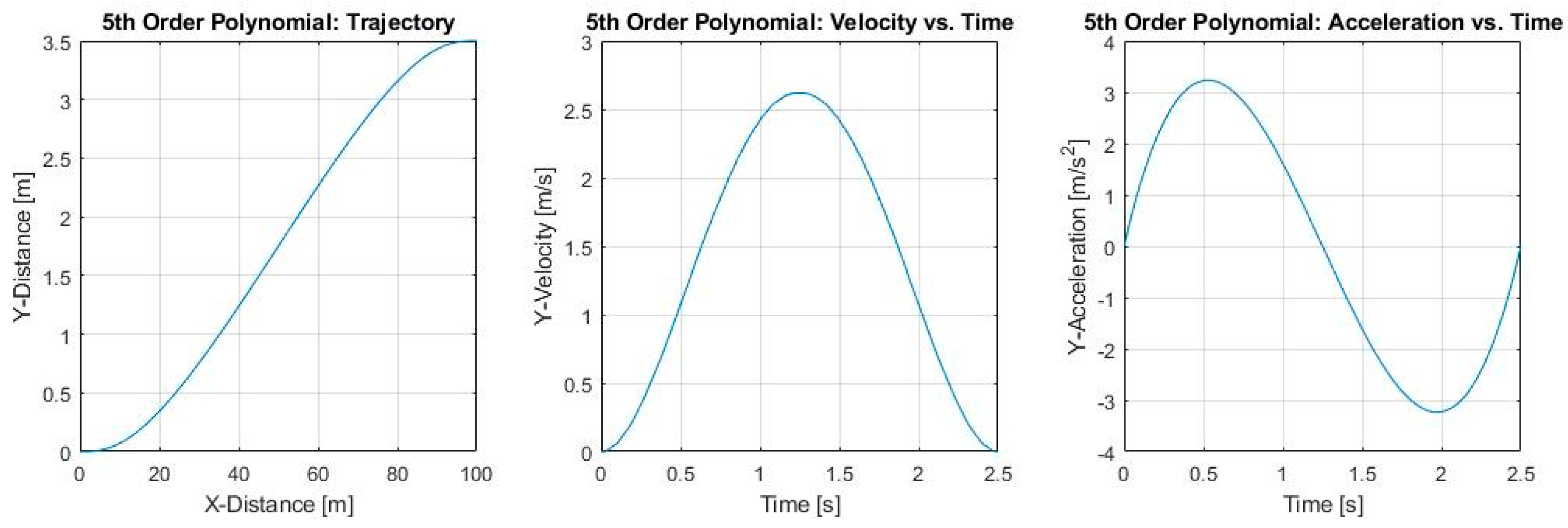
2.2. Vehicle and Trajectory Modeling
- Note the final AV x and y trajectory coordinates, longitudinal speed and acceleration, path curvature, path yaw, and steering road wheel angle.
- All of the outputs except for longitudinal speed will be used in the 3D lookup tables in the online Simulink model.
- The longitudinal speed is used only as a reference when checking the output speed control.
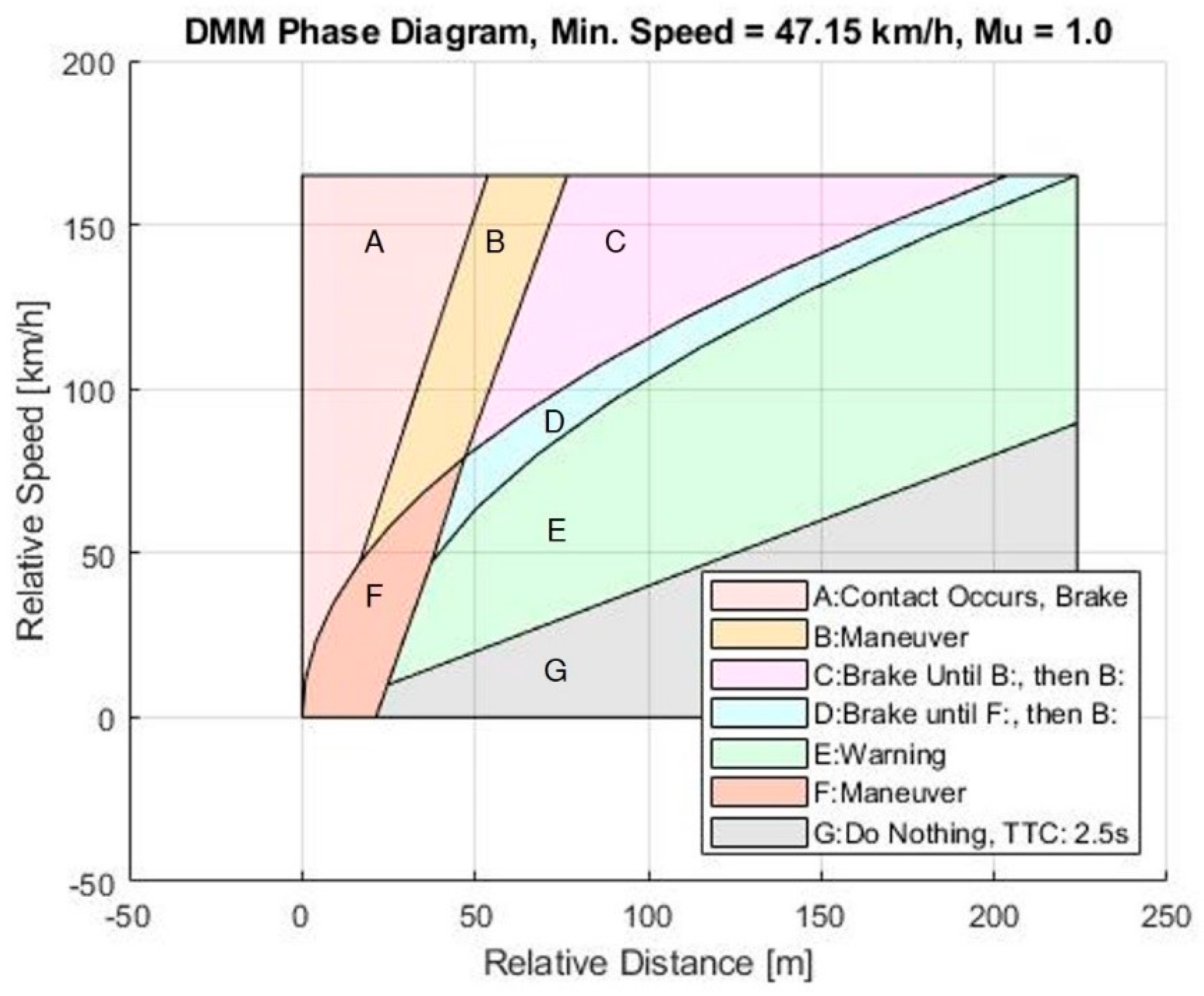
- Calculate the stopping distance for the vehicle based on the initial relative speed.
- Calculate the minimum clearing distance (the longitudinal distance needed for the AV front right corner to barely contact the rear left corner of a square object, when completing a left-turn EOAM/lane change) based on the x-y trajectory, path yaw, and expected width of the detected object (outputs and equations shown later in the paper).
- Use the combined outputs of the minimum clearing distances and the relative speed between the AV and the ARO at the time of the maneuver and create the EOAM boundary curve in the DMM phase diagram.
- The stopping distance at each relative speed is also included in the DMM phase diagram.
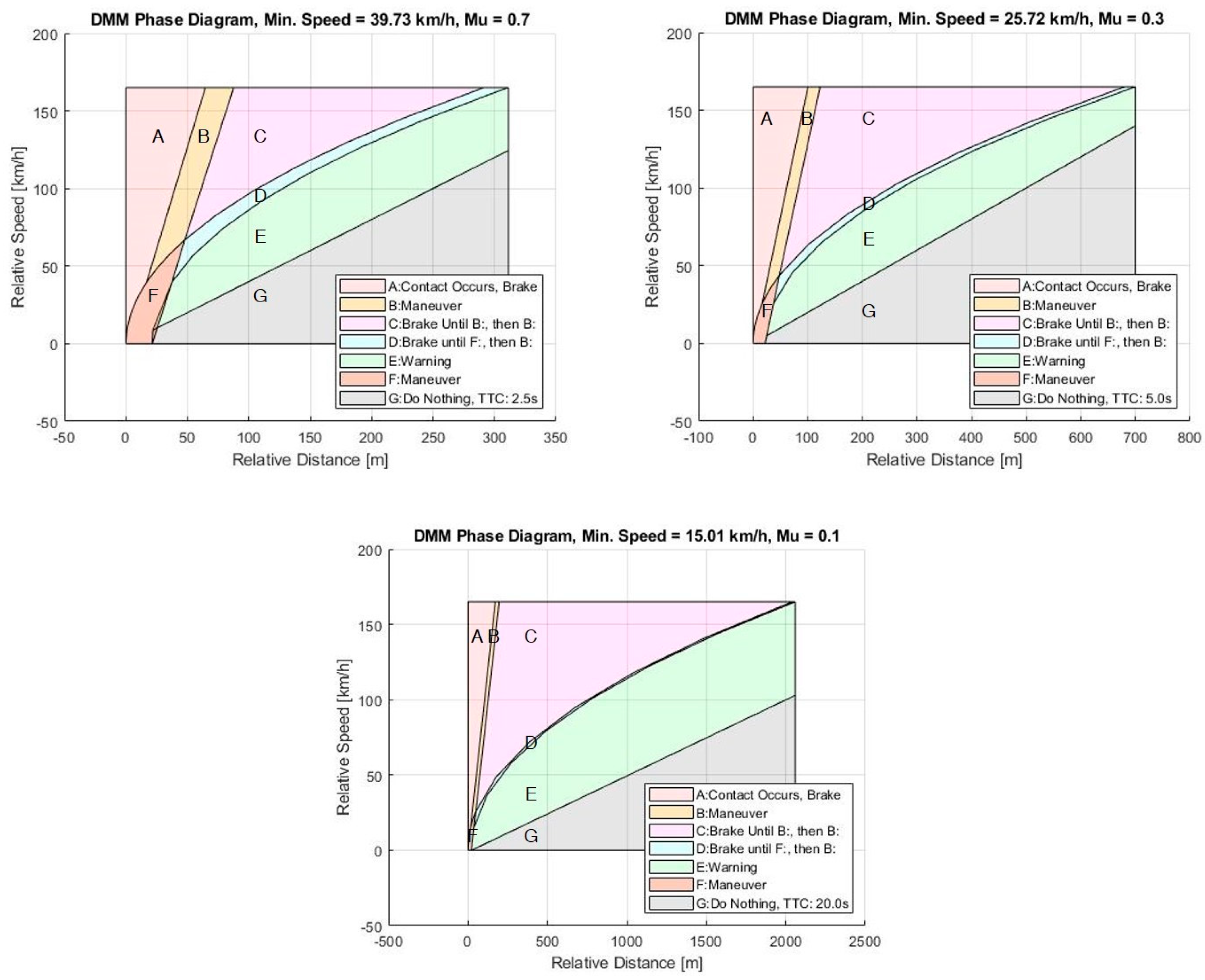
- Repeat the entire process for the next speed in the range of speeds in the EOAM framework design space and for the desired tire–road surface friction values meant to be included in the 3D lookup tables.
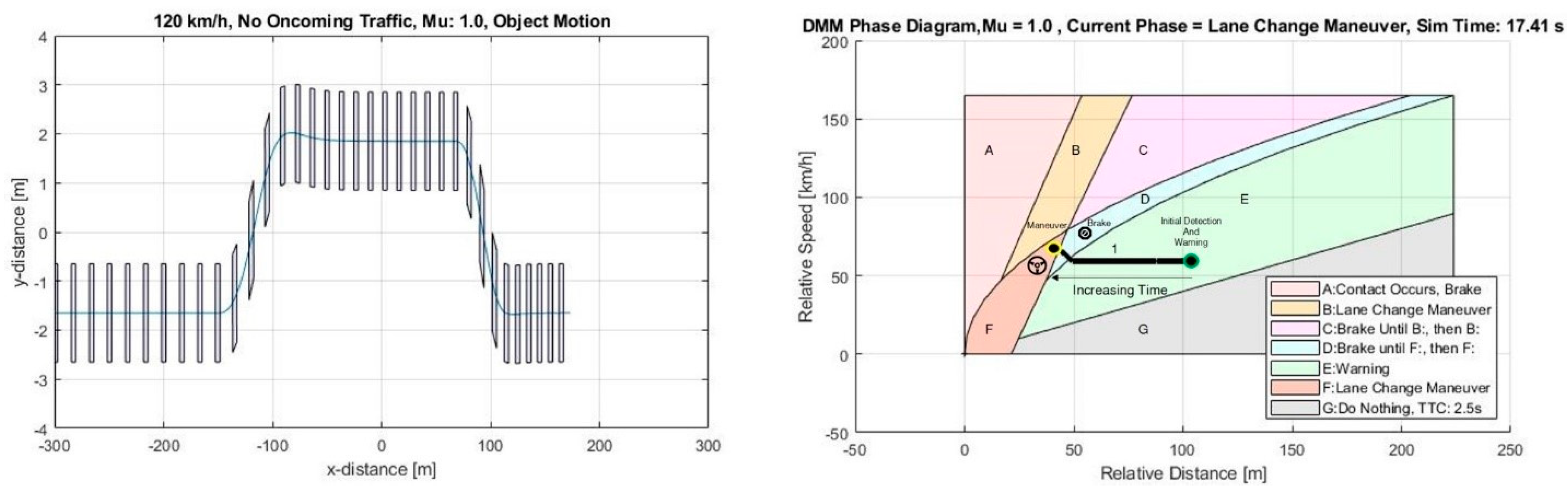
- Once the entire speed range has been simulated with each effective tire–road surface friction coefficient μ, the DMM phase diagrams for each friction coefficient μ can be created. The trajectory (paired geometric path and speed profile) outputs for the friction coefficient μ of 1.0 are shown in Figure 9, with more details about the phase diagrams to follow.
- Geometric path for the lane change maneuver;
- Longitudinal acceleration profile (coupled with the geometric path to form a trajectory);
- Path yaw angle;
- Path curvature.
3. Simulation and Experiment Setup
4. Results and Discussion
- Green: the EOAM single lane change (SLC) was performed successfully without collision of any type with return to the original lane.
- Yellow: the EOAM logic worked as planned but an imminent collision was detected based on the DMM phase diagram so straight-line limit braking was applied and a collision occurred with the ARO ahead, or the AV detected oncoming traffic before the point of no return and determined that straight-line limit braking was necessary to avoid a collision with oncoming traffic and by doing this had a reduced-speed direct (rather than offset/oblique) collision with the ARO.
- Orange: the AV performs the lane-change EOAM, and there is some resulting lateral contact with the oncoming vehicle (not a head-on collision).
- Red: the AV performs the lane-change EOAM, resulting in a head-on collision with the oncoming vehicle that is either direct (squarely in front of the offset vehicle) or offset/obliquely.
5. Conclusions
- Performing EOAM scenario tests with other traffic scenarios on other highway types with various levels of traffic [72];
- Inclusion of AV EOAM framework logic updates that utilize V2X [73];
- Inclusion of actual sensing and perception systems [74];
- Conducting experimentation with different types of vehicles (compact cars, trucks, vans, SUVs) with different drivetrain layouts (FWD, AWD, electronic-AWD);
- Incorporating the effects of the vertical direction into the evaluations [75].
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2018: Summary: (WHO/NMH/NVI/18.20); License: CC BY-NC-SA 3.0 IGO); World Health Organization: Geneva, Switzerland, 2018.
- Centers for Disease Control and Prevention (CDC). Web-based Injury Statistics Query and Reporting System (WISQARS). Retrieved from National Center for Injury Prevention and Control (NCIPC). 2020. Available online: https://www.cdc.gov/injury/features/global-road-safety/index.html (accessed on 1 January 2020).
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey; Traffic Safety Facts Crash•Stats. Report No. DOT HS 812 115; National Highway Traffic Safety Administration: Washington, DC, USA, 2015. [Google Scholar]
- SAE. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles (SAE J3016); Society of Automotive Engineers, SAE Technical Standards Board; SAE International: Warrendale, PA, USA, 2016. [Google Scholar]
- Chee, W.; Tomizuka, M. Lane change maneuver of automobiles for the intelligent vehicle and highway system (IVHS). In Proceedings of 1994 American Control Conference-ACC’94; IEEE: Baltimore, MD, USA, 1994; pp. 3586–3587. [Google Scholar]
- Shiller, Z.; Sundar, S. Emergency Lane-Change Maneuvers of Autonomous Vehicles. ASME J. Dyn. Syst. Meas. Control. 1998, 120, 37–44. [Google Scholar] [CrossRef]
- Hattori, Y.; Ono, E.; Hosoe, S. Optimum vehicle trajectory control for obstacle avoidance problem. IEEE/ASME Trans. Mechatron. 2006, 11, 507–512. [Google Scholar] [CrossRef]
- Peng, T.; Su, L.; Zhang, R.; Guan, Z.; Zhao, H.; Qiu, Z.; Xu, H. A new safe lane-change trajectory model and collision avoidance control method for automatic driving vehicles. Expert Syst. Appl. 2020, 141, 112953. [Google Scholar] [CrossRef]
- Zhu, S.; Gelbal, S.Y.; Aksun-Güvenc, B.; Güvenc, L. Parameter-Space Based Robust Gain-Scheduling Design of Automated Vehicle Lateral Control. IEEE Trans. Veh. Technol. 2019, 68, 9660–9671. [Google Scholar] [CrossRef]
- Ding, Y.; Zhuang, W.; Wang, L.; Liu, J.; Guvenc, L.; Li, Z. Safe and Optimal Lane Change Path Planning for Automated Driving. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 235, 1070–1083. [Google Scholar] [CrossRef]
- Li, P.; Pei, X.; Chen, Z.; Zhou, X.; Xu, J. Human-like motion planning of autonomous vehicle based on probabilistic trajectory prediction. Appl. Soft Comput. 2022, 118, 108499. [Google Scholar] [CrossRef]
- Liang, Y.; Yin, Z.; Nie, L. Shared steering control for lane keeping and obstacle avoidance based on multi-objective MPC. Sensors 2021, 21, 4671. [Google Scholar] [CrossRef]
- Cong, S.; Wang, W.; Liang, J.; Chen, L.; Cai, Y. An Automatic Vehicle Avoidance Control Model for Dangerous Lane-Changing Behavior. IEEE Trans. Intell. Transp. Syst. 2022, 23, 8477–8487. [Google Scholar] [CrossRef]
- Ma, C.; Liu, J.; He, S.; Hong, W.; Shi, J. Confrontation and Obstacle-Avoidance of Unmanned Vehicles Based on Progressive Reinforcement Learning. IEEE Access 2023, 11, 50398–50411. [Google Scholar] [CrossRef]
- De Zarzà, I.; De Curtò, J.; Calafate, C.T. Decentralized Planning of Platoons in Road Transport using Reinforcement Learning. In Proceedings of the 2023 IEEE 43rd International Conference on Distributed Computing Systems Workshops (ICDCSW), Hong Kong, China, 18–21 July 2023; pp. 133–138. [Google Scholar] [CrossRef]
- Sanil, N.; Rakesh, V.; Mallapur, R.; Ahmed, M.R. Deep learning techniques for obstacle detection and avoidance in driverless cars. In Proceedings of the 2020 International Conference on Artificial Intelligence and Signal Processing (AISP), Amaravati, India, 10–12 January 2020; pp. 1–4. [Google Scholar]
- Chen, P.; Pei, J.; Lu, W.; Li, M. A deep reinforcement learning based method for real-time path planning and dynamic obstacle avoidance. Neurocomputing 2022, 497, 64–75. [Google Scholar] [CrossRef]
- Cimurs, R.; Lee, J.H.; Suh, I.H. Goal-oriented obstacle avoidance with deep reinforcement learning in continuous action space. Electronics 2020, 9, 411. [Google Scholar] [CrossRef]
- de Zarzà, I.; de Curtò, J.; Roig, G.; Calafate, C.T. LLM Adaptive PID Control for B5G Truck Platooning Systems. Sensors 2023, 23, 5899. [Google Scholar] [CrossRef]
- Drage, T.; Kalinowski, J.; Braunl, T. Integration of Drive-by-Wire with Navigation Control for a Driverless Electric Race Car. IEEE Intell. Transp. Syst. Mag. 2014, 6, 23–33. [Google Scholar] [CrossRef]
- Wang, Z.; Ding, X.; Zhang, L. Chassis Coordinated Control for Full X-by-Wire Four-Wheel-Independent-Drive Electric Vehicles. IEEE Trans. Veh. Technol. 2023, 72, 4394–4410. [Google Scholar] [CrossRef]
- Meng, B.; Liu, F.Y.; Wang, Y. A Survey of Brake-by-Wire System for Intelligent Connected Electric Vehicles. IEEE Access 2020, 8, 225424–225436. [Google Scholar] [CrossRef]
- Wang, X.; Wu, X.; Cheng, S.; Shi, J.; Ping, X.; Yue, W. Design and Experiment of Control Architecture and Adaptive Dual-Loop Controller for Brake-by-Wire System with an Electric Booster. IEEE Trans. Transp. Electrif. 2020, 6, 1236–1252. [Google Scholar] [CrossRef]
- Zhang, L.; Yu, Z.; Xu, X.; Yan, Y. Research on Automatic Emergency Braking System Based on Target Recognition and Fusion Control Strategy in Curved Road. Electronics 2023, 12, 3490. [Google Scholar] [CrossRef]
- Guvenc, B.A.; Kural, E. Adaptive cruise control simulator: A low-cost, multiple-driver-in-the-loop simulator. IEEE Control. Syst. Mag. 2006, 26, 42–55. [Google Scholar] [CrossRef]
- Emirler, M.T.; Guvenc, L.; Guvenc, B.A. Design and Evaluation of Robust Cooperative Adaptive Cruise Control Systems in Parameter Space. Int. J. Automot. Technol. 2018, 19, 359–367. [Google Scholar] [CrossRef]
- Bian, Y.; Ding, J.; Hu, M.; Xu, Q.; Wang, J.; Li, K. An Advanced Lane-Keeping Assistance System With Switchable Assistance Modes. IEEE Trans. Intell. Transp. Syst. 2020, 21, 385–396. [Google Scholar] [CrossRef]
- Serban, A.C.; Poll, E.; Visser, J. A standard driven software architecture for fully autonomous vehicles. In Proceedings of the 2018 IEEE International Conference on Software Architecture Companion (ICSA-C), Seattle, WA, USA, 30 April–4 May 2018; pp. 120–127. [Google Scholar]
- Mody, M.; Jones, J.; Chitnis, K.; Sagar, R.; Shurtz, G.; Dutt, Y.; Koul, M.; Biju, M.; Dubey, A. Understanding vehicle E/E architecture topologies for automated driving: System partitioning and tradeoff parameters. Electron. Imaging 2018, 2018, 358-1–358-5. [Google Scholar] [CrossRef]
- Gyllenhammar, M.J.; Johansson, R.; Warg, F.; Chen, D.; Heyn, H.M.; Sanfridson, M.; Ursing, S. Towards an operational design domain that supports the safety argumentation of an automated driving system. In Proceedings of the European Congress on Embedded Real Time Systems (ERTS), Toulouse, France, 29–31 January 2020. [Google Scholar]
- Griffor, E.; Wollman, D.; Greer, C. Automated Driving System Safety Measurement Part I: Operating Envelope Specification; NIST Special Publication, 1900, 301; National Institute of Standards and Technology: Washington, DC, USA, 2021. [Google Scholar]
- Euro NCAP. Protocols—General. Retrieved from European New Car Assessment Programme Home. 30 September 2020. Available online: https://www.euroncap.com/en/for-engineers/protocols/general/ (accessed on 26 October 2023).
- Pack, R.; Koopmann, J.; Yu, H.; Najm, W.G. Pre-Crash Sensing Countermeasures and Benefits; United States Paper, (05-0202); National Highway Traffic Safety Administration: Washington, DC, USA, 2005. [Google Scholar]
- Cho, K.; Choi, S.B.; Shin, K.; Yun, Y. A pre-crash discrimination system for an airbag deployment algorithm. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 6949–6954. [Google Scholar]
- Patil, A.; Ginoya, D.; Shendge, P.D.; Phadke, S.B. Uncertainty-Estimation-Based Approach to Antilock Braking Systems. IEEE Trans. Veh. Technol. 2016, 65, 1171–1185. [Google Scholar] [CrossRef]
- Dincmen, E.; Guvenc, B.A.; Acarman, T. Extremum-Seeking Control of ABS Braking in Road Vehicles with Lateral Force Improvement. IEEE Trans. Control. Syst. Technol. 2014, 22, 230–237. [Google Scholar] [CrossRef]
- Zhou, H.; Liu, Z. Vehicle Yaw Stability-Control System Design Based on Sliding Mode and Backstepping Control Approach. IEEE Trans. Veh. Technol. 2010, 59, 3674–3678. [Google Scholar] [CrossRef]
- Oncu, S.; Karaman, S.; Guvenc, L.; Ersolmaz, S.S.; Ozturk, E.S.; Cetin, E.; Sinal, M. Robust Yaw Stability Controller Design for a Light Commercial Vehicle Using a Hardware in the Loop Steering Test Rig. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 852–859. [Google Scholar] [CrossRef]
- Wong, J.Y. Theory of Ground Vehicles; John Wiley & Sons: Ottawa, ON, Canada, 2008. [Google Scholar]
- Gillespie, T.D. Fundamentals of Vehicle Dynamics; Society of Automotive Engineers: Warrendale, PA, USA, 1992; Volume 400. [Google Scholar]
- Mechanical Simulation Corporation. Tire Models; CarSim Version 2021.0; MSC: Ann Arbor, MI, USA, 2020; pp. 1–67. [Google Scholar]
- Milliken, W.F.; Milliken, D.L. Race Car Vehicle Dynamics; Society of Automotive Engineers: Warrendale, PA, USA, 1995. [Google Scholar]
- Brach, R.; Brach, M. Tire Models for Vehicle Dynamic Simulation and Accident Reconstruction; SAE Technical Paper. (No. 2009-01-0102); SAE: Warrendale, PA, USA, 2009. [Google Scholar]
- Brach, R.; Brach, M. The Tire-Force Ellipse (Friction Ellipse) and Tire Characteristics; SAE Technical Paper, (No. 2011-01-0094); SAE: Warrendale, PA, USA, 2011. [Google Scholar]
- You, F.; Zhang, R.; Lie, G.; Wang, H.; Wen, H.; Xu, J. Trajectory planning and tracking control for autonomous lane change maneuver based on the cooperative vehicle infrastructure system. Expert Syst. Appl. 2015, 42, 5932–5946. [Google Scholar] [CrossRef]
- Mehmood, A.; Liaquat, M.; Bhatti, A.I.; Rasool, E. Trajectory Planning and Control for Lane-Change of Autonomous Vehicle. In Proceedings of the 5th International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 19–22 April 2019; pp. 331–335. [Google Scholar]
- Lowe, E. A Framework for Real-Time Autonomous Road Vehicle Emergency Obstacle Avoidance Maneuvers with Validation Protocol; The Ohio State University: Columbus, OH, USA, 2022. [Google Scholar]
- Yi, K.; Hedrick, K.; Lee, S.C. Estimation of tire-road friction using observer based identifiers. Veh. Syst. Dyn. 1999, 31, 233–261. [Google Scholar] [CrossRef]
- Hsu, Y.H.; Laws, S.; Gadda, C.D.; Gerdes, J.C. A method to estimate the friction coefficient and tire slip angle using steering torque. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Chicago, IL, USA, 5–10 November 2006; Volume 47683, pp. 515–524. [Google Scholar]
- Nakao, Y.; Kawasaki, H.; Major, D.J. Estimation of Friction Levels between Tire and Road; SAE Technical Paper, No. 2002-01-1198; SAE: Warrendale, PA, USA, 2002. [Google Scholar]
- Svendenius, J. Tire Modeling and Friction Estimation. Ph.D. Thesis, Lund University, Lund, Sweden, 2007. [Google Scholar]
- Ahn, C.S. Robust Estimation of Road Friction Coefficient for Vehicle Active Safety Systems. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2011. [Google Scholar]
- Guvenc, L.; Aksun-Guvenc, B.; Zhu, S.; Gelbal, S. Autonomous Road Vehicle Path Planning and Tracking Control; Wiley IEEE Press: New York, NY, USA, 2022. [Google Scholar]
- Wallman, C.G.; Åström, H. Friction Measurement Methods and the Correlation between Road Friction and Traffic Safety: A Literature Review; Swedish National Road and Transport Research Institute (VTI): Linköping, Sweden, 2001. [Google Scholar]
- Rossetter, E.J.; Gerdes, J.C. Lyapunov based performance guarantees for the potential field lane-keeping assistance system. J. Dyn. Syst. Meas. Control 2006, 128, 510–522. [Google Scholar] [CrossRef]
- Talvala, K.L.; Gerdes, J.C. Lanekeeping at the limits of handling: Stability via Lyapunov functions and a comparison with stability control. In Dynamic Systems and Control Conference; American Society of Mechanical Engineering: Ann Arbor, MI, USA, 2008; Volume 43352, pp. 361–368. [Google Scholar]
- Kural, E.; Aksun-Guvenc, B. Model Predictive Adaptive Cruise Control. In Proceedings of the 2010 IEEE International Conference on Systems, Man and Cybernetics, Istanbul, Turkey, 10–13 October 2010; pp. 1455–1461. [Google Scholar]
- Emekli, M.E.; Aksun-Guvenc, B. Explicit MIMO model predictive boost pressure control of a two-stage turbocharged diesel engine. IEEE Trans. Control. Syst. Technol. 2016, 25, 521–534. [Google Scholar] [CrossRef]
- Aksun-Guvenc, B.; Guvenc, L.; Ozturk, E.; Yigit, T. Model regulator based individual wheel braking control. In Proceedings of the 2003 IEEE Conference on Control Applications, Istanbul, Turkey, 25 June 2003. [Google Scholar]
- Du, H.; Zhang, N.; Dong, G. Stabilizing Vehicle Lateral Dynamics With Considerations of Parameter Uncertainties and Control Saturation Through Robust Yaw Control. IEEE Trans. Veh. Technol. 2010, 59, 2593–2597. [Google Scholar] [CrossRef]
- Guvenc, L.; Srinivasan, K. Force controller design and evaluation for robot-assisted die and mould polishing. Mech. Syst. Signal Process. 1994, 8, 623–638. [Google Scholar]
- Guvenc, L.; Aksun-Guvenc, B.; Demirel, B.; Emirler, M. Control of Mechatronic Systems; IET: London, UK, 2017. [Google Scholar]
- Aksun-Guvenc, B.; Guvenc, L. Robustness of disturbance observers in the presence of structured real parametric uncertainty. In Proceedings of the 2001 American Control Conference, Cat. No. 01CH37148, Arlington, VA, USA, 25–27 June 2001; Volume 6, pp. 4222–4227. [Google Scholar]
- Aksun-Guvenc, B.; Guvenc, L. Robust steer-by-wire control based on the model regulator. In Proceedings of the International Conference on Control Applications, Glasgow, UK, 18–20 September 2002; Volume 1, pp. 435–440. [Google Scholar]
- Emirler, M.T.; Wang, H.; Aksun-Guvenc, B.; Guvenc, L. Automated robust path following control based on calculation of lateral deviation and yaw angle error. In Proceedings of the ASME 2015 Dynamic Systems and Control Conference, Columbus, OH, USA, 28–30 October 2015; Volume 57267, p. V003T50A009. [Google Scholar]
- Orun, B.; Necipoglu, S.; Basdogan, C.; Guvenc, L. State feedback control for adjusting the dynamic behavior of a piezoactuated bimorph atomic force microscopy probe. Rev. Sci. Instrum. 2009, 80, 063701. [Google Scholar] [CrossRef] [PubMed]
- Demirel, B.; Guvenc, L. Parameter space design of repetitive controllers for satisfying a robust performance requirement. IEEE Trans. Autom. Control. 2010, 55, 1893–1899. [Google Scholar] [CrossRef]
- Wang, G.; Liu, Y.; Li, S.; Tian, Y.; Zhang, N.; Cui, G. New Integrated Vehicle Stability Control of Active Front Steering and Electronic Stability Control Considering Tire Force Reserve Capability. IEEE Trans. Veh. Technol. 2021, 70, 2181–2195. [Google Scholar] [CrossRef]
- Gelbal, S.Y.; Aksun-Guvenc, B.; Guvenc, L. SmartShuttle: A Unified, Scalable and Replicable Approach to Connected and Automated Driving in a Smart City; Science of Smart City Operations and Platforms Engineering in Partnership with Global City Teams Challenge (SCOPE-GCTC) Workshop: Pittsburgh, PA, USA, 2017. [Google Scholar]
- Dincmen, E.; Acarman, T.; Guvenc, B.A. ABS Control Algorithm via Extremum Seeking Method with Enhanced Lateral Stability. In Proceedings of the IFAC Symposium on Advances in Automotive Control, Munich, Germany, 12–14 July 2010; pp. 19–24. [Google Scholar]
- Tjonnas, J.; Johansen, T.A. Stabilization of Automotive Vehicles Using Active Steering and Adaptive Brake Control Allocation. IEEE Trans. Control. Syst. Technol. 2010, 18, 545–558. [Google Scholar] [CrossRef]
- Varga, B.; Ormándi, T.; Tettamanti, T. EGO-Centric, Multi-Scale Co-Simulation to Tackle Large Urban Traffic Scenarios. IEEE Access 2023, 11, 57437–57447. [Google Scholar] [CrossRef]
- Deng, R.; Di, B.; Song, L. Cooperative Collision Avoidance for Overtaking Maneuvers in Cellular V2X-Based Autonomous Driving. IEEE Trans. Veh. Technol. 2019, 68, 4434–4446. [Google Scholar] [CrossRef]
- Mukhtar, A.; Xia, L.; Tang, T.B. Vehicle Detection Techniques for Collision Avoidance Systems: A Review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2318–2338. [Google Scholar] [CrossRef]
- Ozcan, D.; Sonmez, U.; Guvenc, L. Optimisation of the Nonlinear Suspension Characteristics of a Light Commercial Vehicle. Int. J. Veh. Technol. 2013, 2013, 562424. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description |
|---|---|
| Fx | longitudinal (tractive) force |
| Fyf | lateral force on the front axle |
| Fyr | lateral force on the rear axle |
| ax | longitudinal acceleration |
| ay | lateral acceleration |
| df | distance from front axle to center of gravity |
| dr | distance from rear axle to center of gravity |
| m | mass of vehicle |
| Iz | mass moment of inertia about vehicle z axis |
| β | chassis side slip angle |
| αf | front tire side slip angle |
| αr | rear tire side slip angle |
| ψ | vehicle yaw angle |
| vehicle yaw rate | |
| vehicle yaw angular acceleration | |
| δ | steering road wheel angle |
| Ψ | absolute (global) AV heading angle |
| θ | absolute (global) path yaw angle |
| Traffic | Initial AV Speed (km/h) | μ = 1.0 | μ = 0.7 | μ = 0.3 | μ = 0.1 |
|---|---|---|---|---|---|
| No oncoming | 165 | green | green | green | yellow |
| 120 | green | green | green | green | |
| 90 | green | green | green | orange | |
| 55 | green | green | green | green | |
| Oncoming 500 m | 165 | green | green | red | yellow |
| 120 | green | green | orange | yellow | |
| 90 | green | green | green | orange | |
| 55 | orange | orange | yellow | red | |
| Oncoming 400 m | 165 | green | green | red | yellow |
| 120 | green | orange | orange | orange | |
| 90 | orange | orange | yellow | yellow | |
| 55 | orange | green | green | yellow | |
| Oncoming 300 m | 165 | yellow | red | red | yellow |
| 120 | yellow | yellow | yellow | yellow | |
| 90 | green | green | green | orange | |
| 55 | green | green | green | green |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lowe, E.; Guvenc, L. Autonomous Vehicle Emergency Obstacle Avoidance Maneuver Framework at Highway Speeds. Electronics 2023, 12, 4765. https://doi.org/10.3390/electronics12234765
Lowe E, Guvenc L. Autonomous Vehicle Emergency Obstacle Avoidance Maneuver Framework at Highway Speeds. Electronics. 2023; 12(23):4765. https://doi.org/10.3390/electronics12234765
Chicago/Turabian StyleLowe, Evan, and Levent Guvenc. 2023. "Autonomous Vehicle Emergency Obstacle Avoidance Maneuver Framework at Highway Speeds" Electronics 12, no. 23: 4765. https://doi.org/10.3390/electronics12234765
APA StyleLowe, E., & Guvenc, L. (2023). Autonomous Vehicle Emergency Obstacle Avoidance Maneuver Framework at Highway Speeds. Electronics, 12(23), 4765. https://doi.org/10.3390/electronics12234765