
Model Reference Adaptive Observer for Permanent Magnet Synchronous Motors Based on Improved Linear Dead-Time Compensation

Abstract
:1. Introduction
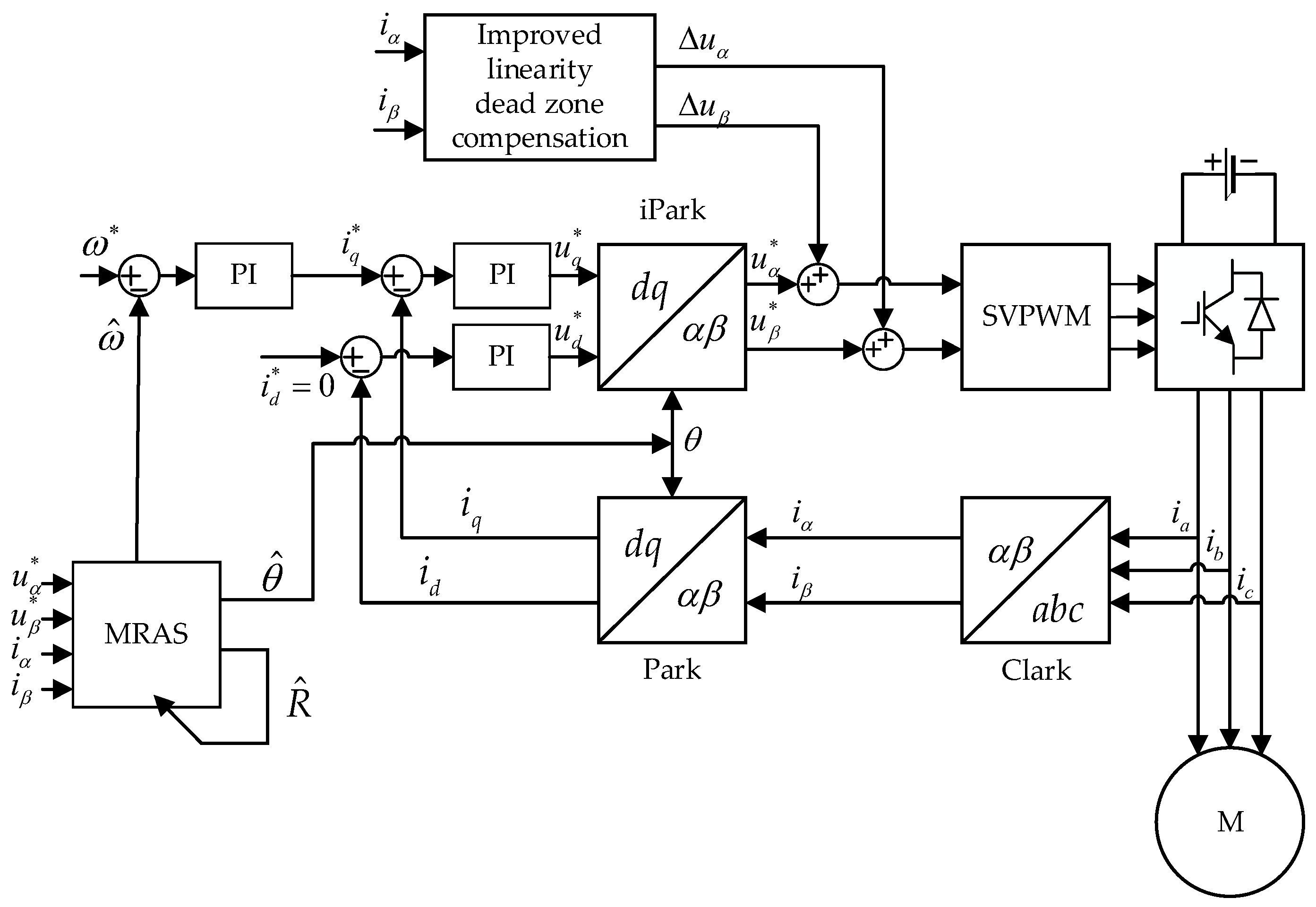
2. Resistance-Based Adaptive MRAS Speed Observation
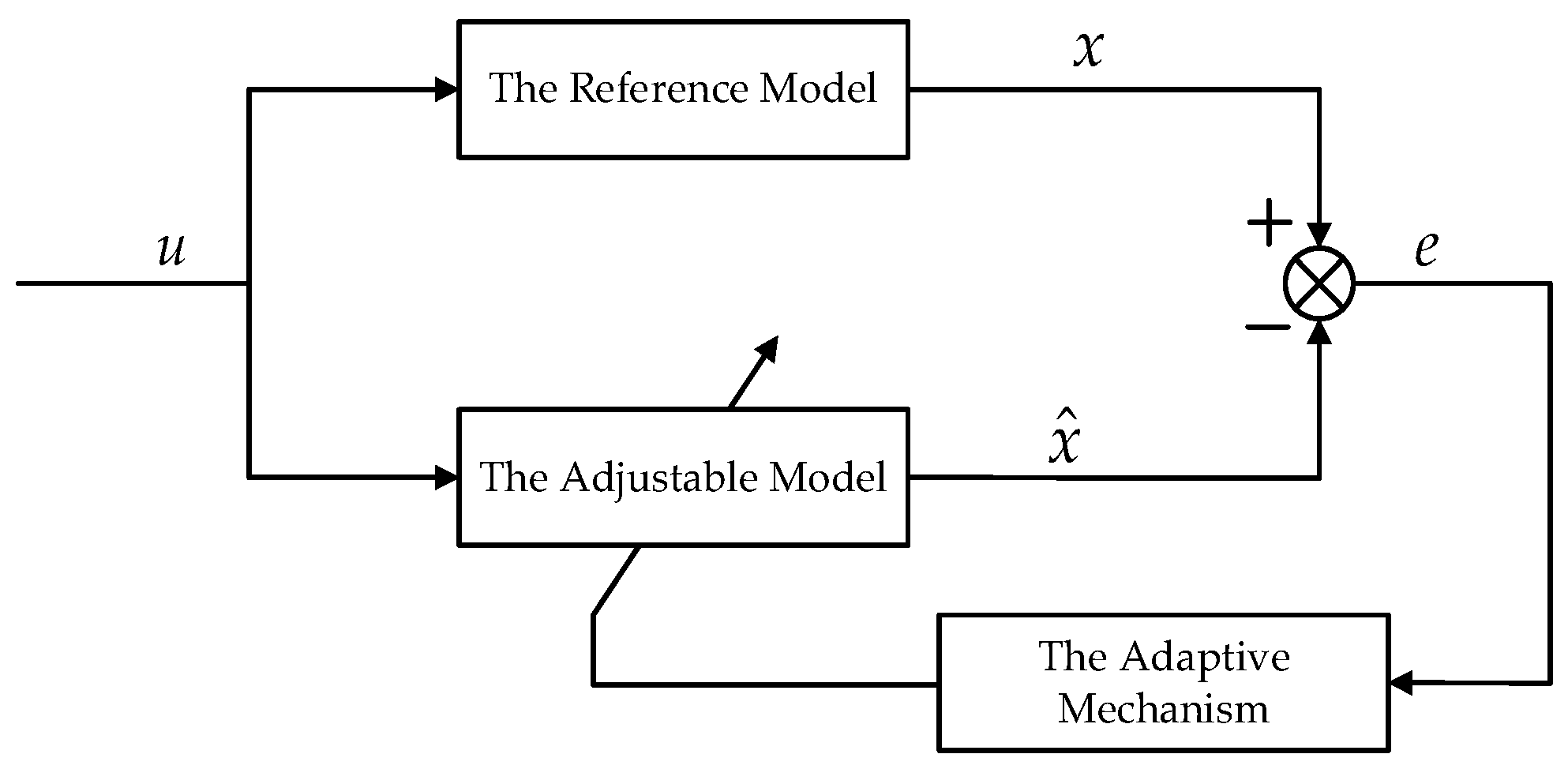
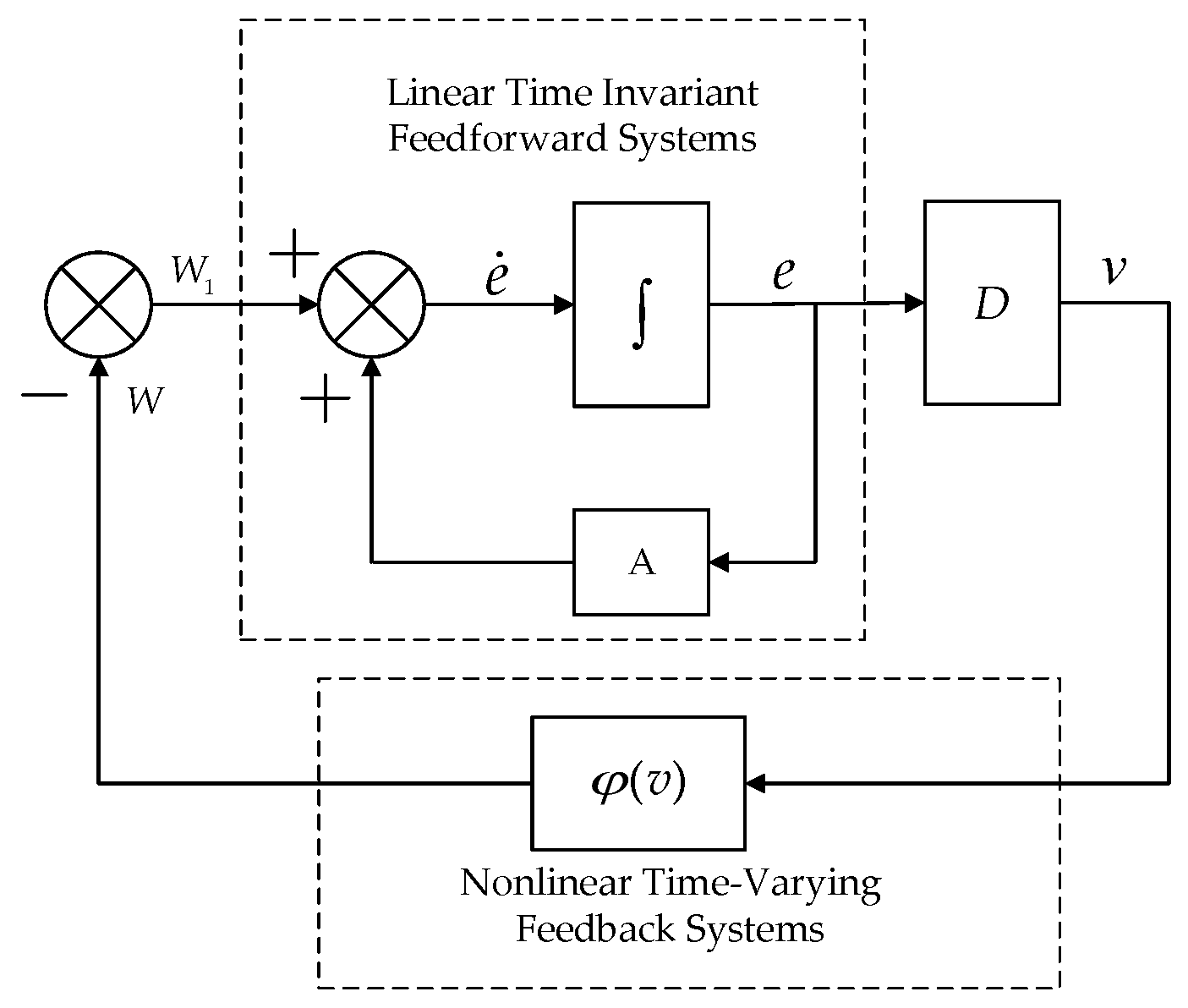
2.1. The Basic Principles of MRAS
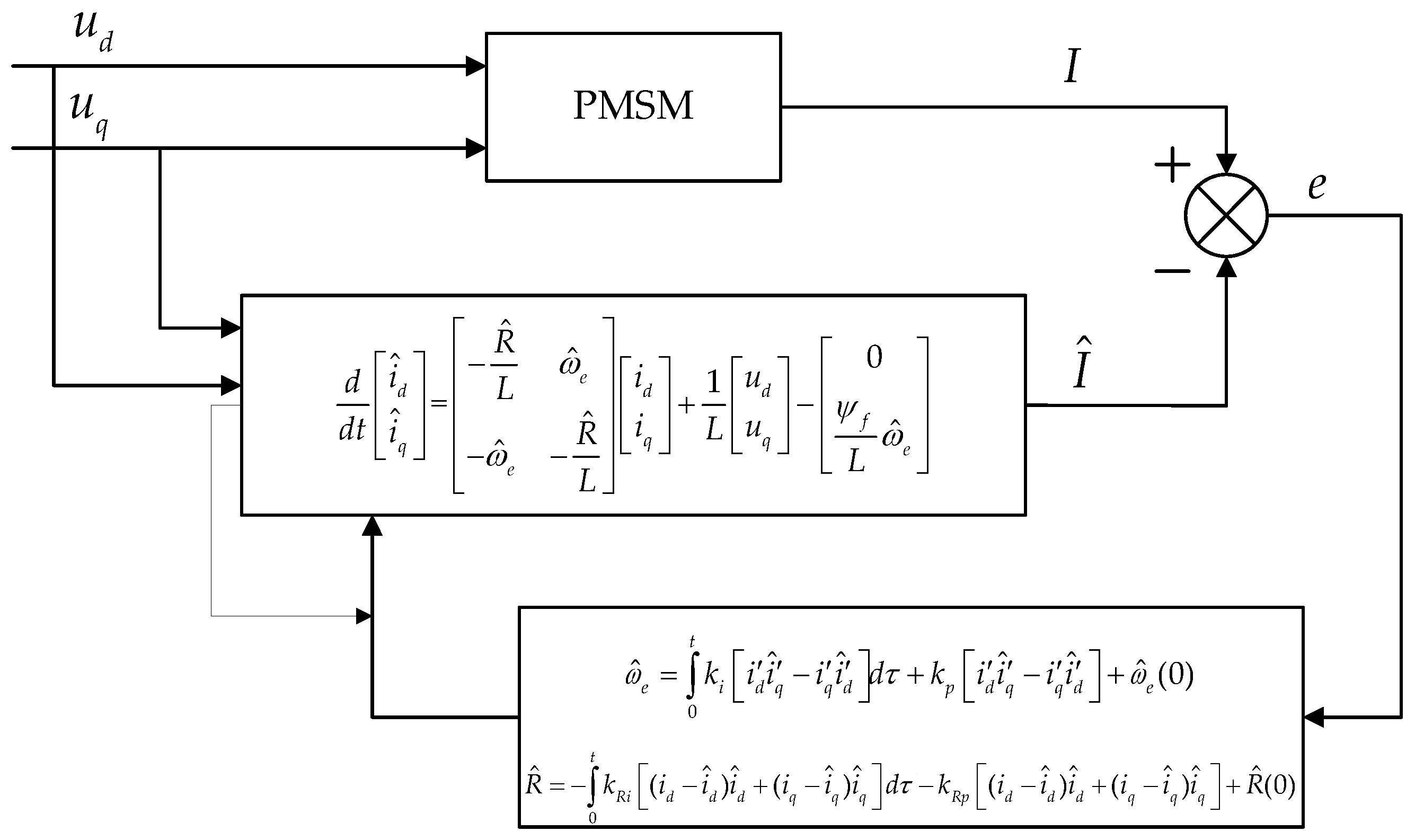
2.2. Resistance Identification and Speed Observation Model
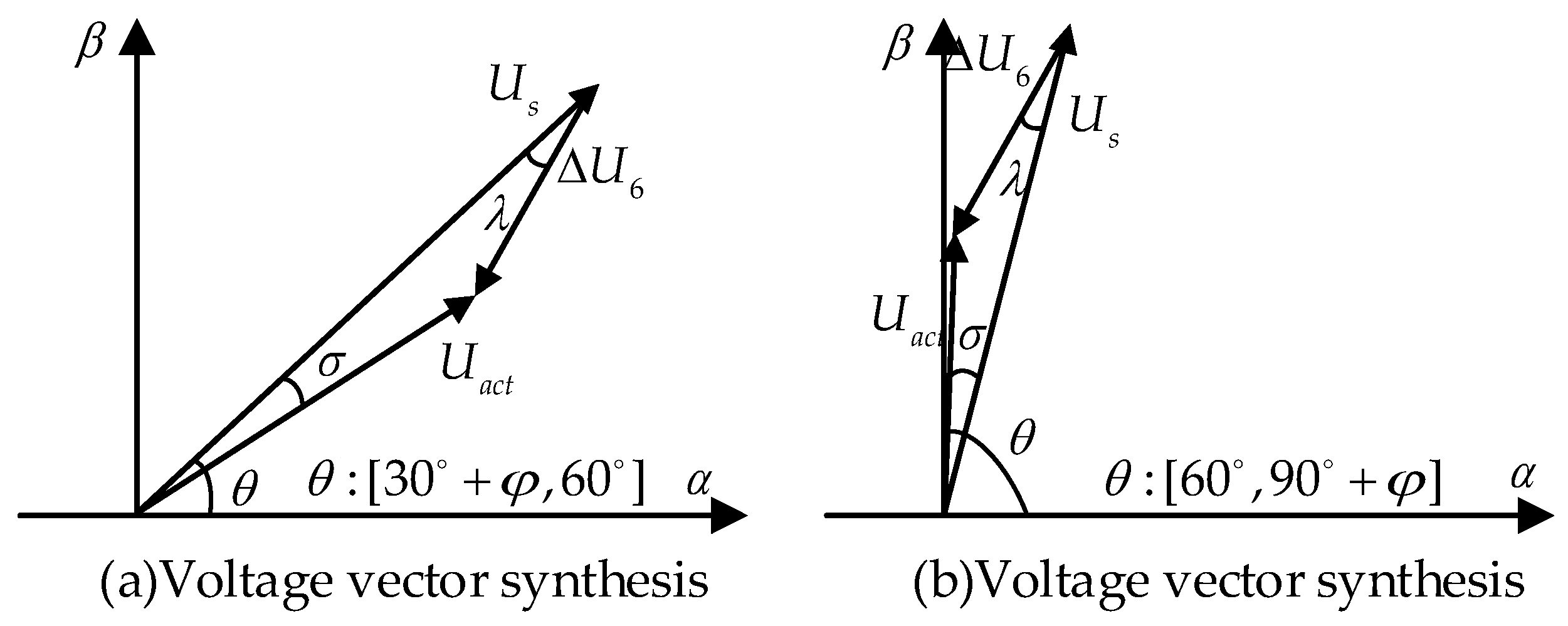
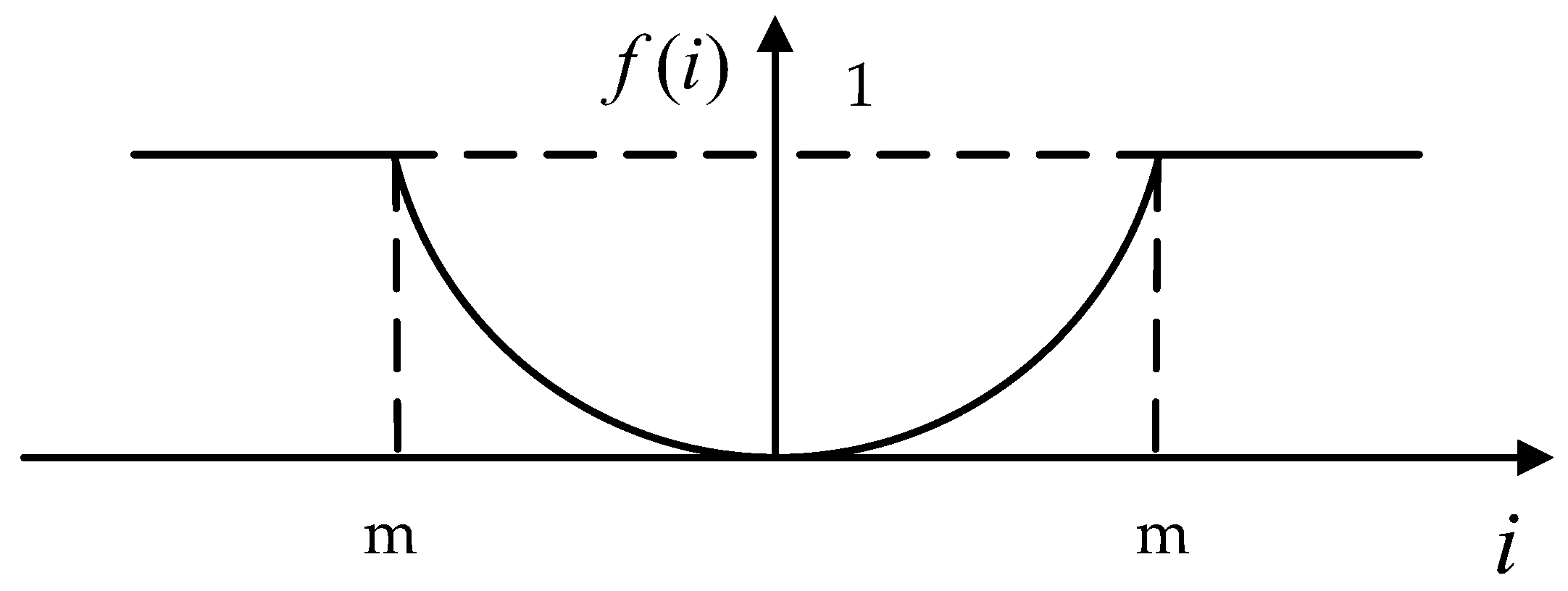
3. Dead Zone Effect on Observation Error
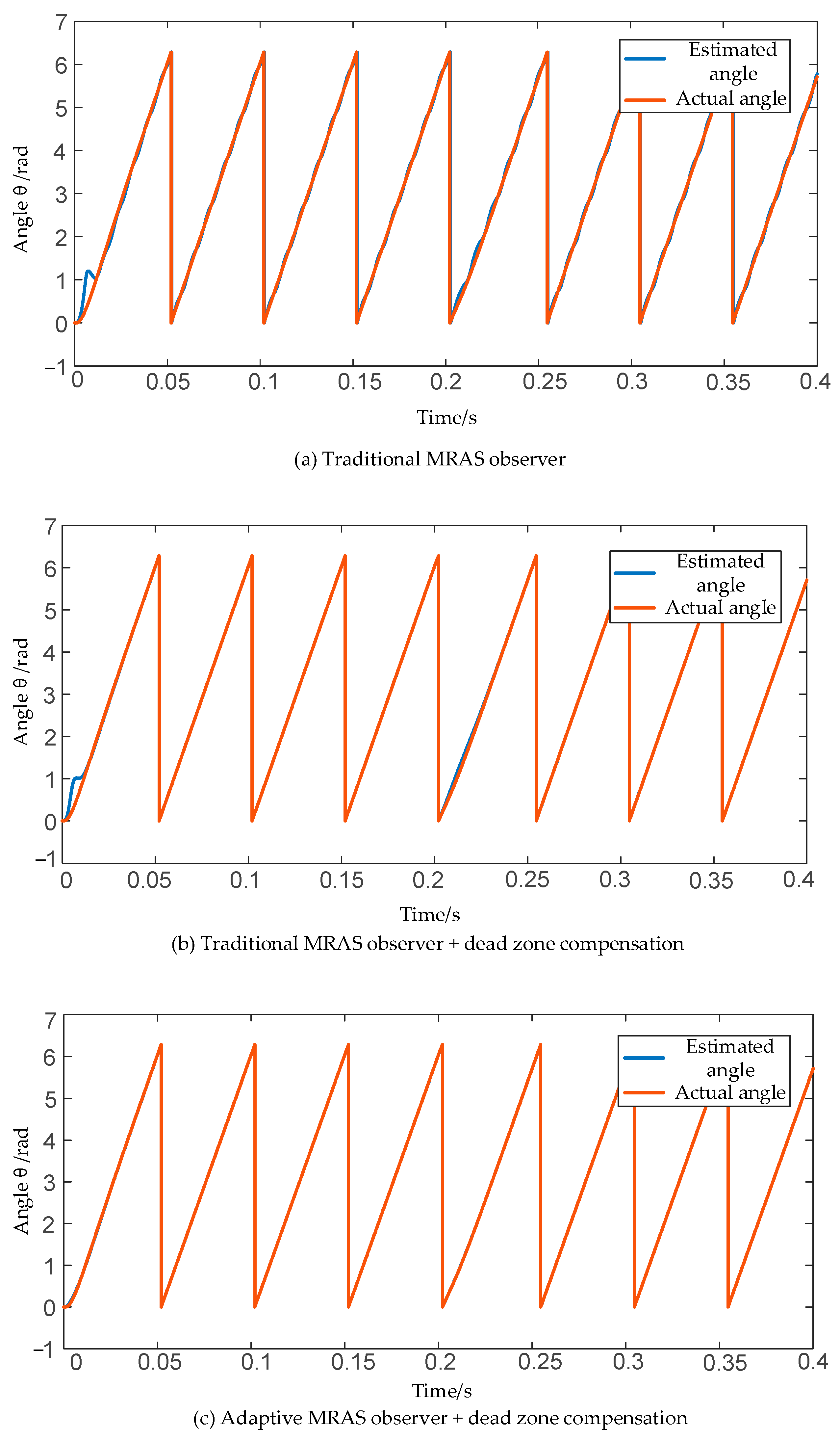
4. Simulation Result Analysis
5. Experimental Verification
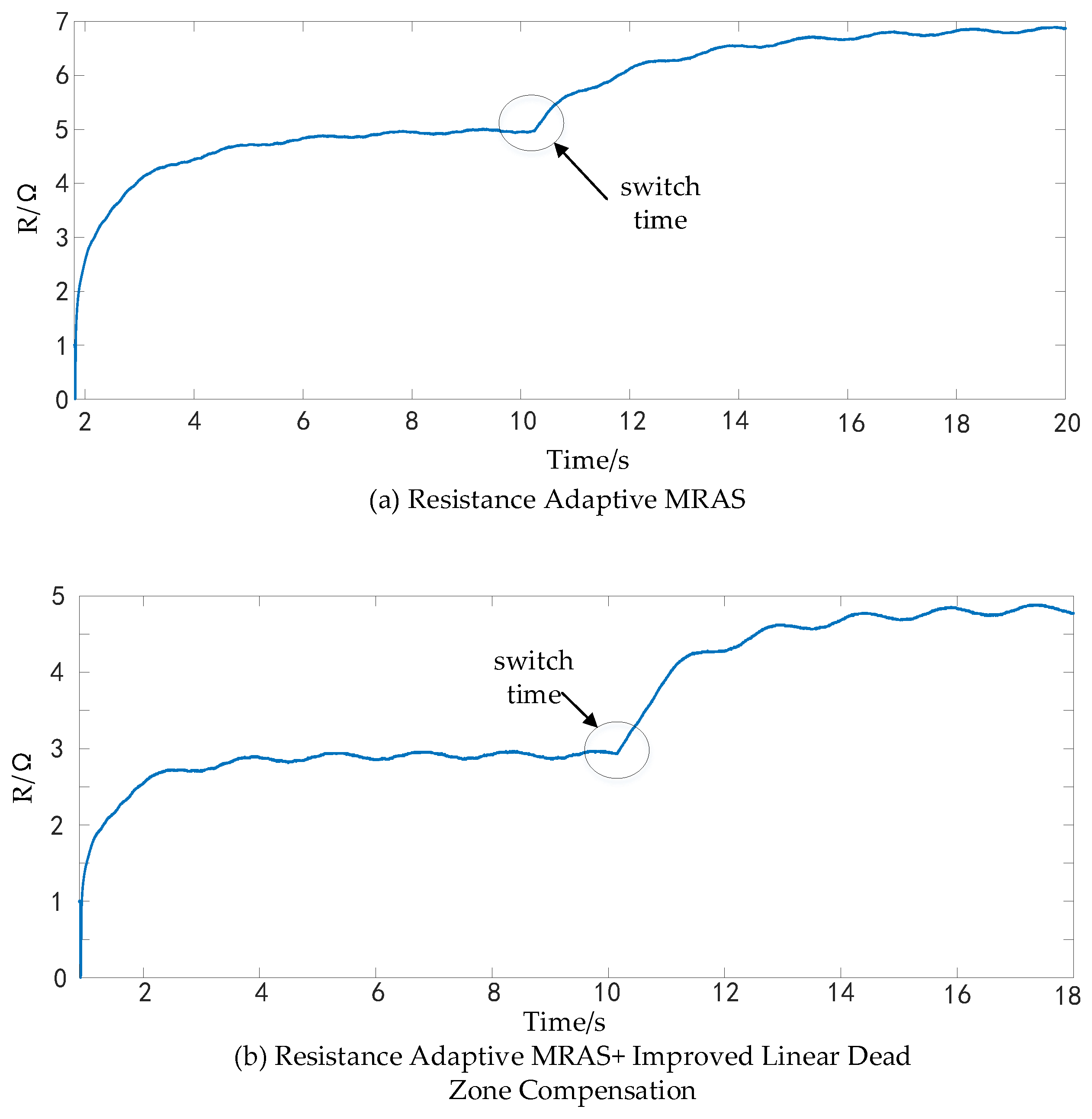
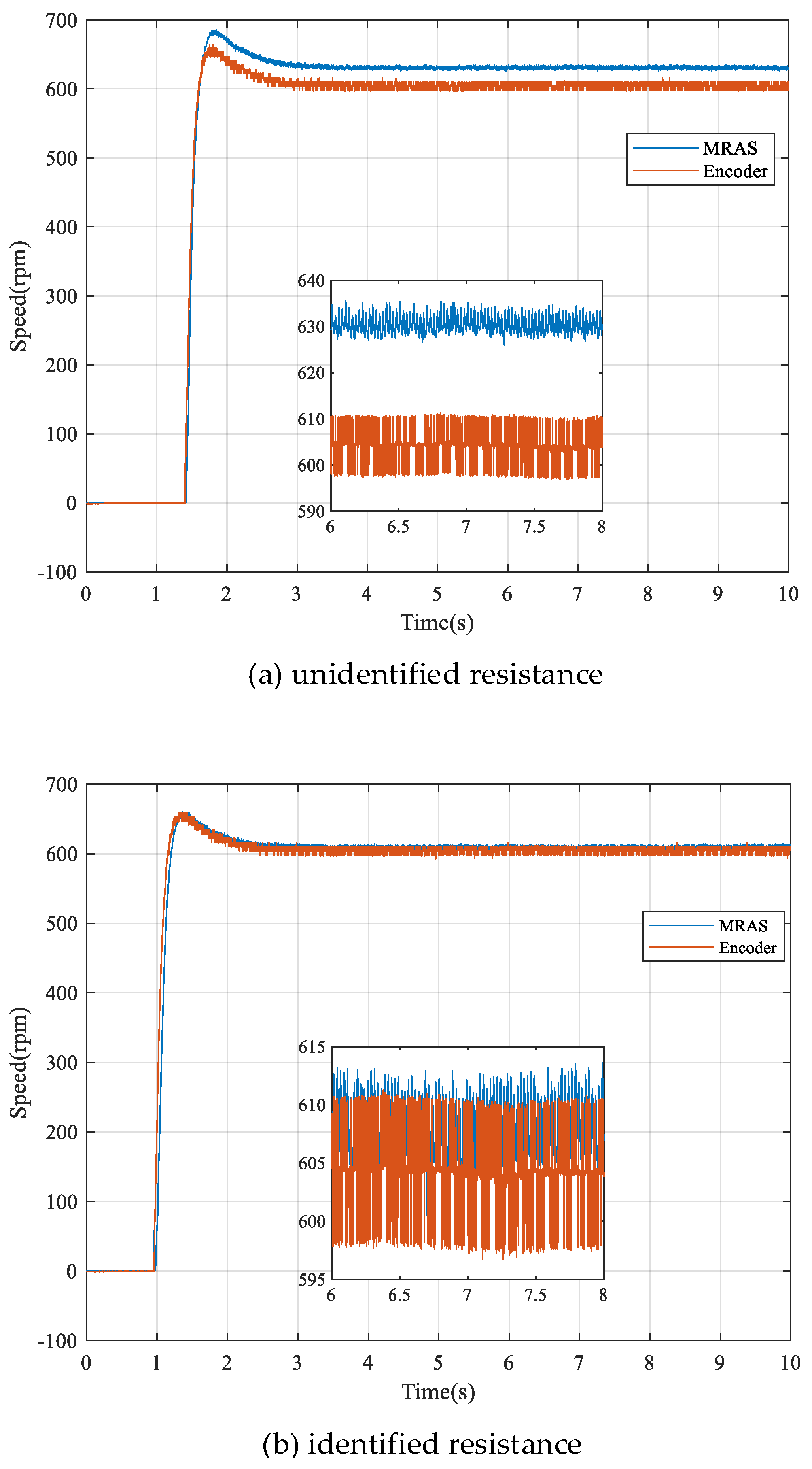
5.1. MRAS Resistance Identification
5.2. Resistance Adaptive MRAS Speed Observation
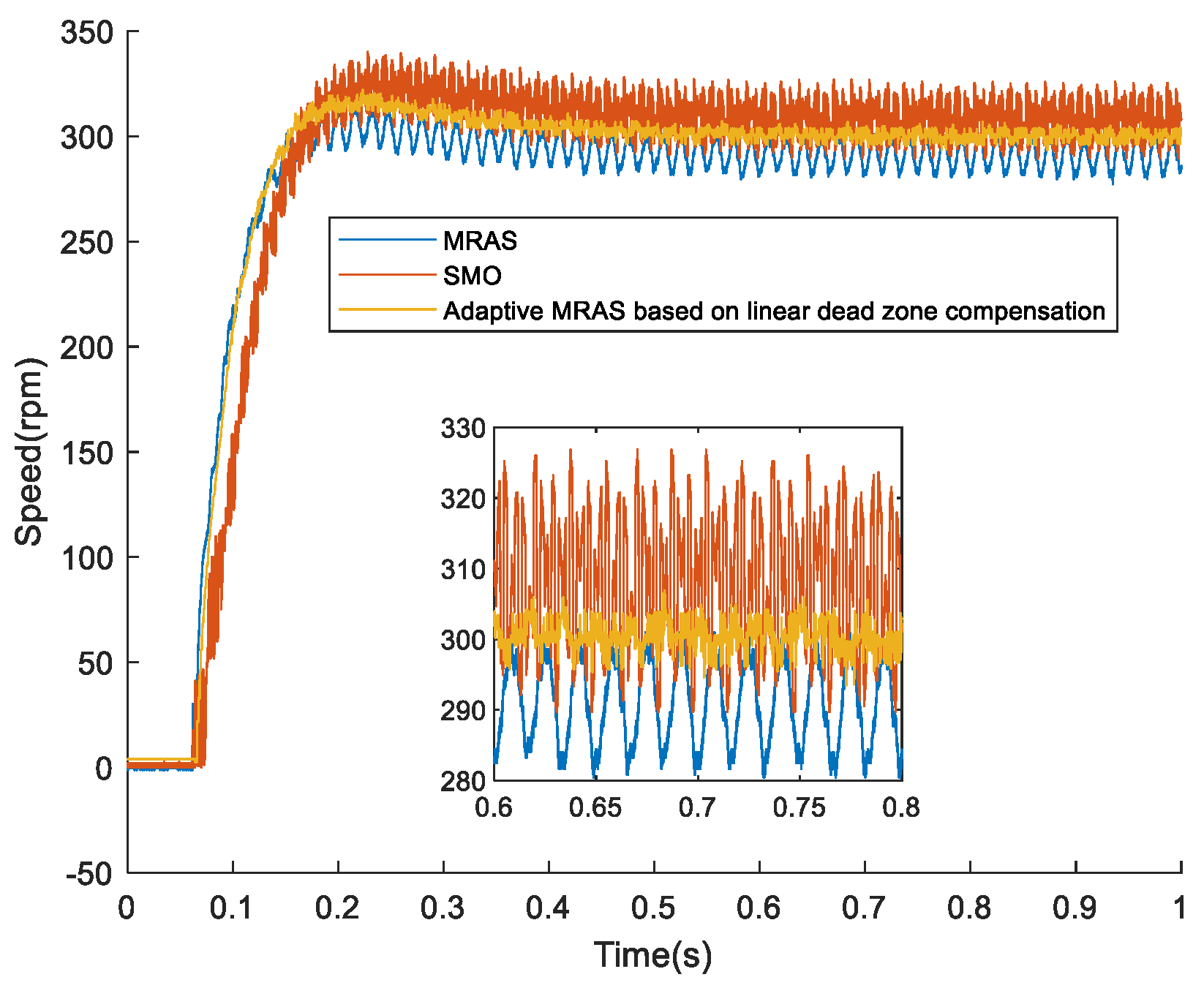
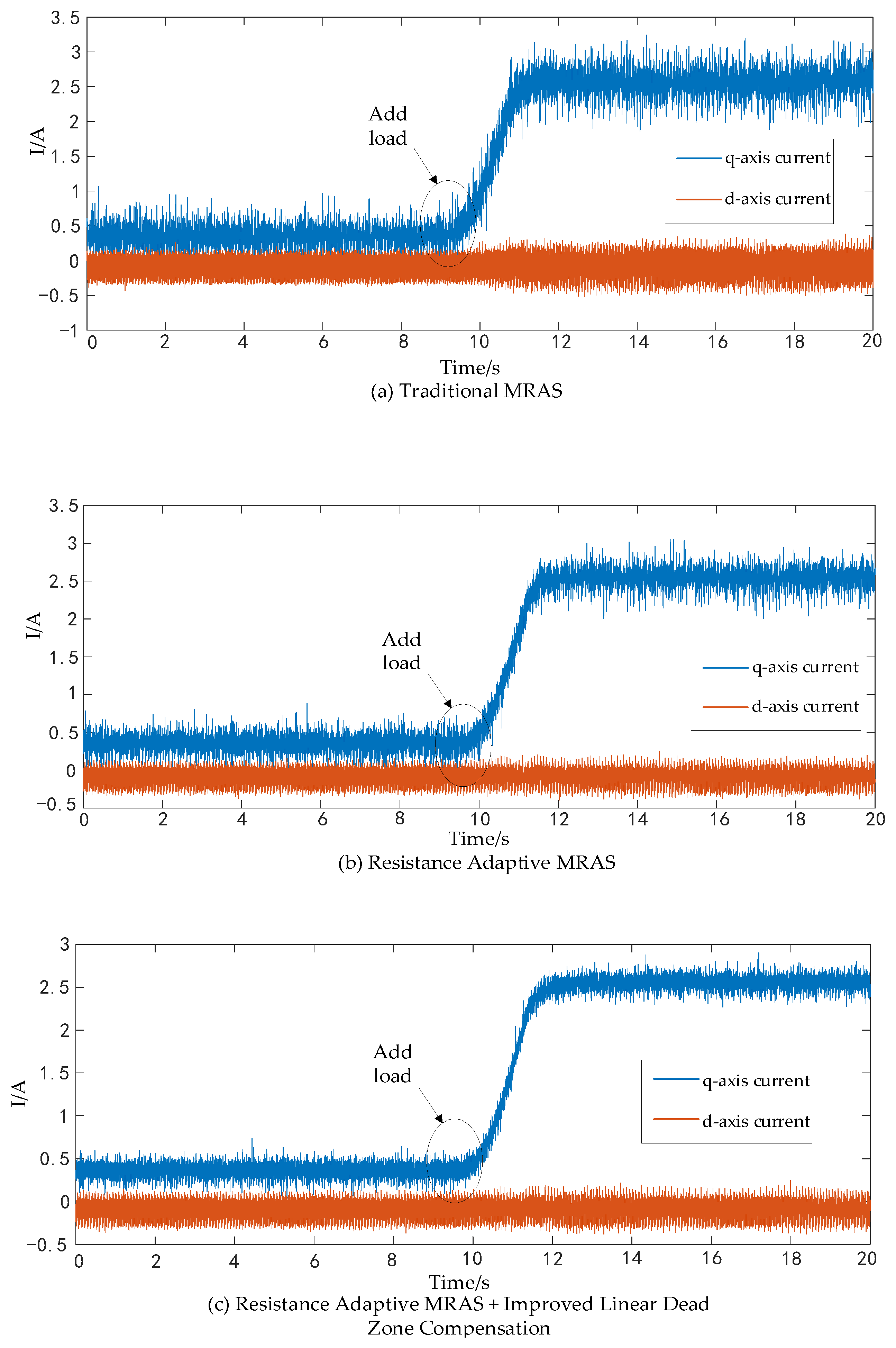
5.3. Experimental Verification of Improved Linear Dead Zone Compensation Effect
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fadli, M.R.; Musyasy, M.M.; Furqani, J.; Purwadi, A. Modelling of Field Orientation Control (FOC) Method in 120 kW Brushless DC Motor (BLDC). In Proceedings of the 2019 6th International Conference on Electric Vehicular Technology (ICEVT), Bali, Indonesia, 18–21 November 2019; pp. 383–389. [Google Scholar]
- Kojabadi, H.M.; Ghribi, M. MRAS-based adaptive speed estimator in PMSM drives. In Proceedings of the 9th IEEE International Workshop on Advanced Motion Control, Istanbul, Turkey, 27–29 March 2006; pp. 569–572. [Google Scholar]
- Liu, Y.; Wan, J.; Li, G.; Yuan, C.; Shen, H. MRAS speed identification for PMSM based on fuzzy PI control. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25–27 May 2009; pp. 1995–1998. [Google Scholar]
- Dong, H.-Y.; Li, W.-G.; Zhao, Y.; Lin, K. Design and simulation a fuzzy-adaptive PI controller based on MRAS. In Proceedings of the 2010 Sixth International Conference on Natural Computation, Yantai, China, 10–12 August 2010; pp. 2321–2324. [Google Scholar]
- Youlin, Y. A Speed Estimation Method with Stator Resistance Online Identification based on MRAS. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 3697–3700. [Google Scholar]
- Sreejeth, M.; Mehra, A. Estimation of stator resistance in sensor-less induction motor drive using MRAS. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; pp. 1–6. [Google Scholar]
- Marković, I.; Erceg, I.; Sumina, D. MRAS based estimation of stator resistance and rotor flux linkage of permanent magnet generator considering core losses. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; pp. 1948–1954. [Google Scholar]
- Mehazzem, F.; Reama, A.; Benalla, H. Online rotor resistance estimation based on MRAS-sliding mode observer for induction motors. In Proceedings of the 4th International Conference on Power Engineering, Energy and Electrical Drives, Istanbul, Turkey, 13–17 May 2013; pp. 828–833. [Google Scholar]
- Lipcak, O.; Bauer, J.; Chomat, M. Reactive Power MRAS for Rotor Resistance Estimation Taking into Account Load-Dependent Saturation of Induction Motor. In Proceedings of the 2019 International Conference on Electrical Drives & Power Electronics (EDPE), The High Tatras, Slovakia, 24–26 September 2019; pp. 255–260. [Google Scholar]
- Khlaief, A.; Saadaoui, O.; Boussak, M.; Chaari, A. Implementation of stator resistance adaptation for sensorless speed control of IPMSM drive based on nonlinear position observer. In Proceedings of the 2016 XXII International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 1071–1077. [Google Scholar]
- Shi, Y.; Sun, K.; Ma, H.; Huang, L. Permanent magnet flux identification of IPMSM based on EKF with speed sensorless control. In Proceedings of the IECON 2010—36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 2252–2257. [Google Scholar]
- Ouyang, Y.; Dou, Y. Speed Sensorless Control of PMSM Based on MRAS Parameter Identification. In Proceedings of the 2018 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Republic of Korea, 7–10 October 2018; pp. 1618–1622. [Google Scholar]
- Ye, Z.; Liu, T.; Fuller, M.; Griepentrog, G. Parameter Identification of PMSM based on MRAS with Considering Nonlinearity of Inverter. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 1255–1260. [Google Scholar]
- Lin, H.; Marquez, A.; Wu, F.; Liu, J.; Luo, H.; Franquelo, L.G.; Wu, L. MRAS-Based Sensorless Control of PMSM with BPN in Prediction Mode. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 1755–1760. [Google Scholar]
- Dong, D.; Xu, W.; Xiao, X.; Liu, Y. Online Magnetizing Inductance Identification Strategy of Linear Induction Motor Based on Second-Order Sliding-Mode Observer and MRAS. In Proceedings of the 2021 13th International Symposium on Linear Drives for Industry Applications (LDIA), Wuhan, China, 1–3 July 2021; pp. 1–6. [Google Scholar]
- Ben-Brahim, L. On the compensation of dead time and zero-current crossing for a PWM-inverter-controlled AC servo drive. IEEE Trans. Ind. Electron. 2004, 51, 1113–1118. [Google Scholar] [CrossRef]
- Sun, X.; Zhong, Y.; Ren, B.; Zhou, B. A Novel Measurement Method of Dead Zone Compensation Time. Proc. Chin. Soc. Electr. Eng. 2003, 23, 5. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rated line voltage (V) | 310 |
| Rated line current (A) | 3 |
| Rated power (W) | 750 |
| Rated speed (r/min) | 2500 |
| Stator phase resistance (Ω) | 1.68 |
| Inductance (mH) | 3.2 |
| Permanent magnet flux linkage (Wb) | 0.093 |
| Number of pole pairs | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Zhang, R.; Zhu, S.; Gao, J.; Zhou, R. Model Reference Adaptive Observer for Permanent Magnet Synchronous Motors Based on Improved Linear Dead-Time Compensation. Electronics 2023, 12, 4907. https://doi.org/10.3390/electronics12244907
Chen H, Zhang R, Zhu S, Gao J, Zhou R. Model Reference Adaptive Observer for Permanent Magnet Synchronous Motors Based on Improved Linear Dead-Time Compensation. Electronics. 2023; 12(24):4907. https://doi.org/10.3390/electronics12244907
Chicago/Turabian StyleChen, Huipeng, Renjie Zhang, Shaopeng Zhu, Jian Gao, and Rougang Zhou. 2023. "Model Reference Adaptive Observer for Permanent Magnet Synchronous Motors Based on Improved Linear Dead-Time Compensation" Electronics 12, no. 24: 4907. https://doi.org/10.3390/electronics12244907
APA StyleChen, H., Zhang, R., Zhu, S., Gao, J., & Zhou, R. (2023). Model Reference Adaptive Observer for Permanent Magnet Synchronous Motors Based on Improved Linear Dead-Time Compensation. Electronics, 12(24), 4907. https://doi.org/10.3390/electronics12244907