3. Visibility Calculation
As the inter-plane satellites move at high speeds, the ISLs need to be constantly switched and, as such, the network topology varies. Therefore, the visibility calculation must be performed before link-building planning. The pre-requisite for establishing an ISL is that two antennas are visible to each other.
Each satellite typically carries several ISL terminals in a large-scale low-orbit constellation network. Moreover, to ensure that the network can cover all satellite nodes, there is usually a situation where more than one ISL is built for one satellite simultaneously. Furthermore, ISL terminals are installed in different spots on the satellite, with varied installation directions, in order to form ISLs with satellites in different directions. As a result, to calculate the visibility more accurately and better meet the needs of engineering development, the antenna should be taken as the object of the visibility calculation rather than the satellite. Furthermore, the antenna installation direction and the turntable rotating threshold should be considered when the visibility calculation is performed, instead of viewing the satellite as a particle.
As shown in
Figure 3, an ISL terminal is represented as a sub-node, and the number of sub-nodes contained in a network node is the number of terminals carried by the satellite. Then, the onboard computer should calculate the visibility among the sub-nodes of different nodes and build ISLs among the visible sub-nodes.
Before the visibility calculation, the satellite onboard computer calculates the period
P of the relative positions of the nodes of the satellite constellation network, according to the orbit semi-major axis based on Kepler’s third law [
28], as shown in (
1):
where
a is the semi-major axis of the satellite’s elliptical orbit;
G is the gravitational constant;
and
are the masses of the earth and the satellite, respectively; and
P is also the planning period for the constellation network.
The visibility is represented by a Boolean matrix
V, with the size of
, where
N is the number of antennas in the constellation and
K is the number of time segments in the period
P. The antenna is the calculation object in the visibility calculation process.
A denotes the set of all antennas in the constellation, and an antenna is written as
.
indicates that the
ith and
jth antennas in the constellation are visible to each other at time segment
k and the ISL can be built, while
indicates that the two antennas are not mutually visible. Furthermore,
and
, for
are the position and velocity vectors of the satellite, respectively, where the antenna
i is placed in the J2000 coordinate system, and the maximum rotation half-angle of the link terminal’s turntable is
. The first condition to be met in order to ensure visibility between
and
is that the earth does not block the connection between the two antennas. In this case, the distance between the connection and the center of the earth, as shown in
Figure 4, should be greater than the radius of the earth, as which is represented by (
2):
where
is the radius of the Earth.
Another factor that needs to be considered is that, after the ISL is built, the rotation angles of the two antenna turntables should be smaller than their turntable rotation capabilities. In the J2000 coordinate system, the vector from the antenna
i to
j is defined as (
3):
The vector from the antenna
j to
i is defined as (
4):
To calculate the rotation angle of the link terminal turntable, it is necessary to convert the above two vectors from the J2000 coordinate system to the vehicle velocity local horizontal (VVLH) coordinate system. The VVLH coordinate system is defined such that the origin is at the center of mass of the satellite; the
Z-axis points toward the center of mass of the Earth from the origin; the
X-axis is in the orbital plane and perpendicular to the
Z-axis, along the direction of the satellite’s velocity; and the
Y-axis follows the right-hand system and is opposite to the direction of angular momentum [
29]. Thus, the transformation matrix for converting the J2000 coordinate system to the VVLH coordinate system is (
5):
where
Thus, in the VVLH coordinate system, the vector pointing from
i to
j is given by
Similarly, the vector pointing from
j to
i is given by
The above two vectors in (
9) and (
10) also need to be converted from the VVLH coordinate system to the antenna coordinate system using the body coordinate system [
30]. The
Z-axis of the antenna coordinate system points in the antenna installation direction. The transformation matrices are
and
, respectively. The body coordinate system is the coordinate system that describes the satellite attitude. Thus,
and
can be expressed as (
11) and (
12):
where
and
are the transformation matrices from the VVLH coordinate system to the body coordinate system, determined according to the real-time attitude of the satellite.
Therefore, in the antenna coordinate system, the vector from antenna
i to
j and the vector from antenna
j to
i can be expressed as (
13) and (
14), respectively:
Assuming that the antenna turntable has the same rotating range in all directions, the rotation angles at both ends of the link can be calculated after performing unit vector calculation, taking out the
Z-axis component, and carrying out an inverse cosine calculation on vectors. The rotation angles of the antennas
i and
j are expressed as
and
, respectively, as shown in
Figure 4. These two angles must be smaller than the antenna turntable’s rotation angle threshold to achieve the visibility requirement, as expressed by (
15) and (
16):
Moreover, ISLs also have a link length threshold [
18]. To ensure that the information is received intelligibly with an adequate signal-to-noise ratio, after the design of antennas has been completed, the link budget should be calculated, which considers all of the power gains and losses that a communication signal experiences. Through that, the maximum length should be satisfied when planning ISLs. Therefore, the final requirement for ensuring visibility is that the link length
in
Figure 4 should be smaller than the length threshold
, as shown in (
17):
Based on the same distance, optical systems guarantee a greater Shannon capacity than RF (Radio Frequency) systems [
2].
Furthermore, FSA with equal-length time segments is used to describe and evaluate the visibility calculation. Through experiments, we chose the most appropriate time segment length that allows the visibility among the inter-plane links to be utilized to the greatest extent. The constellation network period is divided into fixed equal-length time segments and transform the dynamic state into fixed states. In time segment k, in order to consider that two antennas are visible, the requirement that the two antennas are visible at any time within time segment k must be met.
According to the above analysis, the visibility between any two antennas
and
in the constellation in time segment
k is determined as (
18):
4. Link-Building Planning
The link-building planning algorithm is the core of the onboard centralized ISL-building planning scheme. In this section, within the scheme of the onboard centralized ISL-building planning, and on the basis of the visibility calculation, the link-building constraints, modeling, and onboard inter-plane link-building algorithm are discussed.
4.1. Link-Building Constrains
The link-building table is represented by a Boolean matrix
T, with the size of
. The element
indicates that the constellation’s
ith antenna forms a link with the
jth antenna in time segment
k, while
indicates that no link is built. The visible matrix
V and the link-building matrix
T are subject to the following constraints:
where
K is the number of time segments in the period
P, and
.
Equations (
20) and (
22) show that both the visibility matrix and the link-building matrix have symmetry, indicating that the ISL has no directionality, and that the visible and link-building relationships between
i and
j are the same between
j and
i. The link between
i and
j must be constructed based on the fact that
i and
j are mutually visible, as shown in (
23).
In addition, we impose some constraints on the ISL-building for the link-building table
T; namely,
where
represents the set of antennas in the plane adjacent to the plane where
i is located; (
24) indicates that, at the same time, one antenna can only build at most one link with an antenna in the adjacent plane; and (
25) indicates that the antenna cannot build a link with antennas in a non-adjacent plane at any time. These two constraints ensure that ISLs are only formed between antennas carried by satellites on adjacent orbital planes.
4.2. Modeling
In the preceding subsections, we clearly described how to generate the link visibility three-dimensional Boolean matrix and the network ISL-building planning constraints. Based on these constraints, in this subsection, we model the link-building planning problem. The planned topology should have the characteristics of low link switching frequency, high topology stability, low average delay, and low maximum delay. To achieve these optimization goals, the problem is modeled as shown in (
26):
where
is the weight of the number of link-switches
, compared with the previous time segment;
is the weight of the parameter that indicating whether there is a topology change
, compared with the previous time segment (we define that the topology is changed when at least a single ISL changes);
is the weight of the maximum end-to-end delay
;
is the weight of the average end-to-end delay
; and
and
are determined based on the usage requirements of different constellations. If one constellation has strong demand for low delay,
and
should be set to large numbers; meanwhile, if a stable topology is important for the constellation, the weights
and
should be large. These weights remain same among the periods.
The smaller the number of link switches and topology changes , the higher the topology stability.
Satellite networks are not only used for ground communications, but also for efficient collaboration among satellites, especially for remote sensing satellite constellations. In some use-cases, each ISL in the constellation is used and plays an important role. Therefore, the link-switching number and ISL duration can be considered as important performance indicators to characterize the network topology.
The maximum end-to-end delay
can be further expressed as
where
represents the delay from node
i to node
j in the
kth time segment. The average end-to-end delay
can be expressed as
In this study, the end-to-end delay includes the table-lookup delays of all forwarding nodes and ISL latency of wireless signal propagation on the routing path. For the end-to-end delay, we adopt the hop-count metric [
14,
31,
32].
Equation (
26) falls into the category of ILP that is NP-hard and, so, the time complexity to find the optimal solution for such a multi-constrained integer linear programming problem is very high [
8,
10]. The topology
T is a three-dimensional matrix; thus, the time complexity to solve this problem is
, which is unacceptable in the context of limited onboard computing resources. When
and
, this problem may take more than years, even when using a supercomputer. As a result, an algorithm with lower time complexity is required to realize optimal link-building planning without compromising the performance.
4.3. Link-Building Planning Method Based on Topology Stability Optimization
We provide a link-building planning method based on topology stability optimization (LPTSO) in this subsection, which can handle the link-building planning problem while providing very low algorithm time complexity. This method can improve topology performance, thus enabling satellites to execute link-building planning onboard autonomously.
As discussed in
Section 3, the satellite onboard computer calculates the position vector
and the velocity vector
for
in the period using the orbit extrapolation algorithm. Furthermore, the calculation of the visibility Boolean matrix in the period
P takes it into account the installation positions of the antennas and the antenna turntable rotating thresholds, in order to ensure that multiple antennas with different installation positions on one satellite can build ISLs at the same time.
The preliminary simulation shows that, in most of the LEO Walker Delta constellation, adjacent satellites in the same plane are visible to each other continuously [
13,
33]. As a result, to build a more stable topology, in our method, all satellites build ISLs with the adjacent satellites permanently and form a ring in a plane; that is, the
ith satellite in plane
p builds ISLs with the
th satellite and the
th satellite in plane
p.
However, the satellites in adjacent planes may not remain visible to each other and, so, inter-plane ISLs should be planned. The pseudo-code of the inter-plane link-building planning method discussed in this subsection is expressed by Algorithm 1.
Step one. From the three-dimensional Boolean visibility matrix, calculate the total ISL visible duration for any two inter-plane satellite antennas in the constellation in period
P; namely,
where
is the sum of the visible time segments in period
P between antenna
i and antenna
j.
| Algorithm 1: Link-building_Planning () |
- Require:
The visibility matrix of V and the number of time segments of K - Ensure:
The planning result of - 1:
for
do - 2:
for do - 3:
; - 4:
end for - 5:
end for - 6:
for
do - 7:
; - 8:
for do - 9:
if then - 10:
for do - 11:
; - 12:
end for - 13:
end if - 14:
end for - 15:
end for - 16:
for
do - 17:
for do - 18:
; - 19:
end for - 20:
end for
|
Step two. For any antenna
in the constellation, select an antenna
with the longest link duration sum in the period in each of antenna
i’s two adjacent orbital planes; namely,
These two antennas can be defined as the first-choice antennas of antenna i, and the associated links are defined as the first-choice ISLs.
In addition, the link visibility between antenna
i and its non-first-choice antennas in the link-visibility Boolean matrix should be set as invisible at all times in the period; that is, non-first-choice ISLs are not considered in the link-building planning of inter-plane ISLs, as represented by
Step three. For each unused antenna in the constellation, select one unused antenna that is visible to it at this time, and keep the inter-plane ISL until the ISL is invisible. If there is more than one unused antenna visible simultaneously, select the antenna with the later broken visibility to establish an ISL with it.
Compared with the time complexity of ILP, the time complexity of the method stated in this subsection is , allowing it to reasonably be solved on a satellite onboard computer. In our simulation, when and , the onboard computer took less than one second to complete the computation.
5. Performance Evaluation
5.1. Simulation Setup
To compare the performance of the method proposed in this paper and several common methods used in related works, we developed a simulation scenario involving which is a Walker Delta 32/4/1 constellation; that is, there are four planes in the constellation, with eight satellites per plane. The orbital elements of one of the satellites in the constellation are stated in
Table 1. The simulation period was 7800 s, approximately the constellation’s repeat cycle.
Furthermore, there were four ISL terminals in each satellite. The installation direction and turntable rotation half-angle of each ISL terminal are stated in
Table 2.
The preliminary simulation indicates that, in the constellation, all satellites on the same plane can use ISL terminal I and ISL terminal II to build ISLs continuously and form a ring. Nevertheless, on the other hand, the ISLs between adjacent planes need to be switched.
Furthermore, to verify the applicability of the proposed link-building planning method, we developed a large-scale constellation scenario, as described in
Section 5.4 below.
All the simulations were performed on a computer typically used on satellites, having a 50 MHz CPU and 512 MB RAM.
5.2. Influence of Different Value of Time Segment Length
As mentioned in the previous sections, in some works, FSA has been used to describe the ISL-building planning problem in one period [
11,
15,
16]. The system period is divided into several equal-length time segments, and a fixed network topology is maintained in each time segment. The ISLs visible at each time in the time segment are considered to be visible in the time segment. Generally speaking, in the process of visibility calculation, the start and end time points of the visible time segments are not aligned with the equal-length time segments of the FSA. If the time segment length is too large, some visible time segments that could have been used to build ISLs would be wasted, resulting in a reduction in the number of ISLs and, consequently, degradation of the network topology performance. However, on the other hand, if the time segment length is too small, the whole network topology may switch frequently, also reducing the network performance. Therefore, selecting an appropriate time segment length is important, which can allow for a reduction of the network topology switching frequency without increasing the network delay. Another way to process the time segment of FSA is not to use an equal-length time segment; that is, the calculated visible time segments are used to build ISLs without alignment to the equal-length time segments. In a system with a time accuracy of one second, not using an equal-length time segment is equivalent to the equal-length time segment with a length of one second.
In order to select the appropriate time segment length in FSA for the method proposed in this paper, in this subsection, we compared the implementation results of the method under different time segment lengths. Common time segment lengths are 300 s or 600 s [
11,
16]. In the simulation, the time segment length was set to 150 s (LPTSO-150s), 300 s (LPTSO-300s), 450 s (LPTSO-450s), 600 s (LPTSO-600s), 750 s (LPTSO-750s), and an unequal-length time segment (LPTSO-1s). In the Walker Delta 32/4/1 constellation, based on the various different time segment lengths, the method proposed in this paper was implemented, and the network topology performance metrics such as ISL duration, topology duration, average delay, and maximum delay, were compared.
Figure 5 shows the experimental results for average ISL duration and average topology duration under different time segment lengths. We can see, from the figure, that when the time segment was less than or equal to 300 s, the average ISL duration and the average topology duration were almost consistent. When the time segment length was greater than 300 s, with an increase in the time segment length, the average ISL duration decreases while the average topology duration increased. This is because the topology duration in the initial visibility calculation results was close to 300 s. Therefore, when the time segment was less than or equal to 300 s, there was almost no loss of visible time segment when aligning the start and end time of the visible time segments to the equal-length time segments. When the time slice was greater than 300 s, during the alignment process, many available visible time segments were partially or completely cut off, resulting in decreased average ISL duration.
Figure 6 shows the experimental results for maximum delay and average delay under different time segment lengths. We can see, from the figure, that when the time segment was less than or equal to 300 s, the maximum delay and average delay were consistent. When the time segment length was greater than 300 s, the maximum delay and average delay increased, while the network performances decreased as the time segment length increased. This further confirms the previous statement: when the time segment length was greater than 300 s, during the process of alignment to the equal-length time segments, many available visible time segments were partially or completely cut off. The number of ISLs built in the network decreased, thus increasing the maximum delay and average delay.
The experimental results indicate that, in order to improve the stability of the network topology as much as possible without reducing the network transmission performance, the time segment length should be set to 300 s, which allows for a better trade-off between topology stability and network performance. Therefore, we used 300 s as the time segment length of LPTSO FSA for the Walker Delta 32/4/1 constellation.
5.3. Performance in Small-Scale Constellation
Next, we evaluated and analyzed the onboard centralized network ISL-building planning in the Walker Delta 32/4/1 constellation.
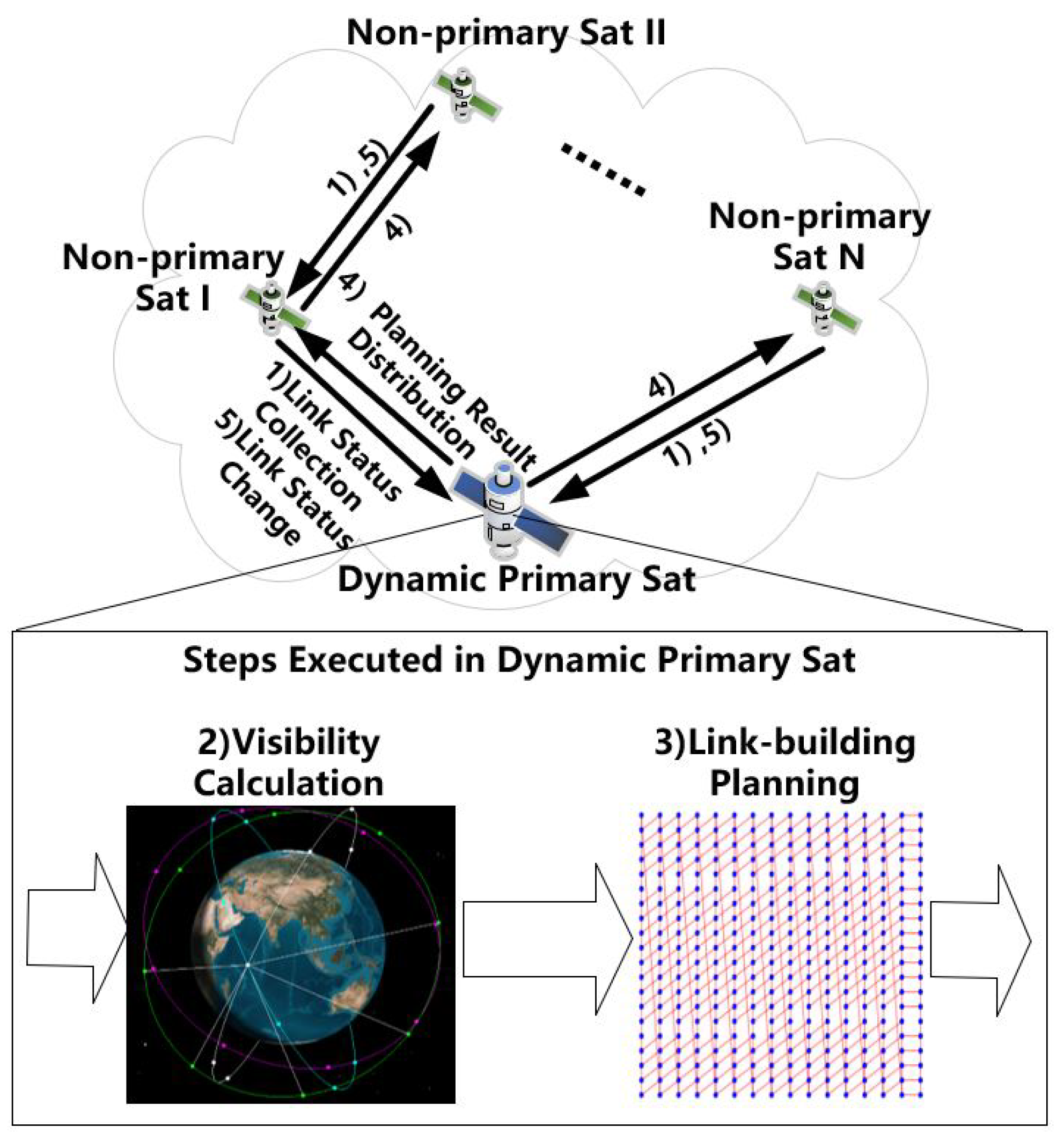
Under the small-scale constellation configuration, we simulated the onboard centralized network ISL-building planning scheme. The results indicated that each satellite in the constellation can act as the dynamic primary satellite for onboard centralized ISL-building planning, which can complete ISLs terminal status collection, visibility calculation, link-building planning, and the link-building planning table distribution. The non-primary satellites can send their terminal status, retrieve the link-building planning table from the primary satellite, and control the ISL terminal to rotate and build the ISLs, according to the link-building planning table.
The link-building planning process is the core of the onboard centralized network ISL-building planning scheme. Therefore, in the following, we mainly analyze and compare the link-building planning results.
Figure 7 shows the link-building planning results for the Walker Delta 32/4/1 constellation using the LPTSO proposed in this paper. The figure shows four topology snapshots, and each one indicates the ISL-building status. The figure is also a graphic display of the planning table that are generated and distributed by the primary satellite. We can see, from the figure, that the pattern is similar to the pattern of MSN, in which the outcomes are regular, making it simple to manage, maintain, and debug onboard. It is essential to increase the satellite network’s simplicity of use and improve the reliability of the constellation. On the other hand, different from MSN, the topology generated by LPTSO is not a static mesh-like topology, and it presents a limited dynamic pattern. Every sub-node has a small-size optional pair set, and every option in the set is high-quality one, such that the network topology can improve the network topology stability on the premise of reducing network delay.
Table 3 provides the ISL duration, topology duration, average delay, maximum delay, and other performance indicators of the network topology in a period, consistent with the analysis in the previous subsection.
As stated in
Section 1, ILP, heuristic algorithms, and graph matching algorithms are unsuitable for onboard centralized ISL-building planning. In this subsection, we compare the results of the link-building planning method proposed in this paper with those of MSN and LCTS.
Figure 8 shows a comparison of the average ISL duration under different strategies. The average ISL duration of LPTSO was similar to that of MSN and much higher than that of LCTS. This is because, unlike LPTSO and MSN, LCTS builds some ISLs with shorter visible time segments, resulting in a shorter average duration of ISLs and a larger standard deviation of duration.
Figure 9 and
Figure 10 illustrate the topology switching and topology duration in a period when using three methods. The duration length of each topology snapshot of LPTSO was the same (i.e., 300 s). The average duration of MSN was shorter, while the standard deviation was larger, partly because MSN does not use equal-length time segments. On the other hand, the average duration of MSN is also shorter than that of LPTSO-1s, as a given antenna competes with other antennas to build an ISL with LPTSO-1s. Thus, breaking an ISL often occurs at the same time as building another ISL, which decreases the network topology switching frequency. However, with MSN, once an ISL is visible, it is built immediately, producing many fragmented topology snapshots. In addition, the average duration of LCTS is short, while its standard deviation is large. This is because LCTS builds ISLs with different lengths of visible time segments. Although the total number of ISLs is high, frequent network topology switching occurs.
Figure 11 and
Figure 12 show the average and maximum delays with the three methods in a period, respectively. The horizontal axes for the two figures are the topology snapshot number. As the LPTSO topology lasted for a longer time and there were fewer topology snapshots in the period, the lines for LPTSO in the figures are shorter. It can be seen from the figures that the average delay and maximum delay of LPTSO were small and stable over the period. As MSN builds ISLs between fixed ISL terminals, the number of ISLs in the network was lower and, so, the average and maximum delay were both high. The number of ISLs in the network with LCTS is large, making the average delay close to or slightly smaller than that of LPTSO in most snapshots. However, due to the frequent and unstable ISL switching in the time dimension, the average delay fluctuated greatly. Furthermore, the ISLs with LCTS were unevenly distributed among different adjacent planes, so the maximum delay was higher than that of LPTSO.
5.4. Link-Building Planning Performance in Large-Scale Constellation
In order to verify the applicability of the link-building planning method proposed in this paper to a large-scale constellation, we evaluated and analyzed the results of the proposed onboard network ISL-building planning method based on a Walker Delta 500/20/1 constellation; that is, there were 20 planes with 25 satellites per plane. The orbital elements of the seed satellite in the constellation are stated in
Table 4. Again, four ISL terminals per satellite were considered. The installation direction and turntable rotation half-angle of each ISL terminal were as stated in
Table 2. The simulation period was 7200 s, approximately the constellation’s repeat cycle.
Figure 13 compares the maximum/average/minimum ISL duration of two constellations, from which it can be seen that the average ISL duration of Walker Delta 32/4/1 was similar to that of Walker Delta 500/20/1.
Figure 14 compares the topology switches of two constellations. The topology switching time points of the two constellations were fully aligned, and the duration of each topology snapshot was 300 s.
Table 5 compares the average linked ratio, maximum delay, and average delay of the two constellations. It should be noted that the average linked ratio refers to the ratio between the number of inter-plane ISLs built and the theoretical maximum number of inter-plane ISLs in the constellation. The linked ratio of the topology planned by this method in the two constellations was similar. Due to the large scale of the Walker Delta 500/20/1 constellation, the average and maximum delays were relatively large.
According to the above analysis, the performance indicators, such as ISL duration, topology duration, and linked ratio of the topology planned by LPTSO-300s for Walker Delta 32/4/1 and Walker Delta 500/20/1 constellations, were the same or similar, demonstrating that LPTSO-300s is still applicable to large-scale constellations.
6. Conclusions
ISLs are increasingly being used in LEO constellation projects. In this context, achieving efficient and optimized satellite network ISL-building planning for ISLs is of great significance for realizing efficient LEO satellite constellation networking. For the first time, we implemented an onboard centralized network ISL-building planning method, thus decoupling ground station control and enhancing the autonomy of network management. We provided a solution to the visibility calculation process in the onboard centralized ISL-building planning scheme by using the antenna as the calculation object. The visibility calculation process takes into account the antenna installation angle, the turntable rotation threshold, and the satellite attitude. Furthermore, the visibility calculation realizes the simultaneous link-building of multiple antennas, making it closer to the engineering implementation. Then, the link-building planning process in the onboard ISL-building planning management scheme was modeled using ILP. In order to solve the problem that ILP computational complexity is too high, making it unsuitable for onboard deployment, we presented a link-building planning method based on topology stability optimization, which significantly increased the network’s usability. The simulation results demonstrated that any satellite in the satellite network can implement the onboard centralized ISL-building planning as the dynamic primary satellite. Furthermore, ISL visibility can be calculated correctly. Moreover, the link-building planning method based on topology stability optimization improves the network topology stability on the premise of reducing network delay, and the overall performance was better than MSN and LCTS in experiments.
Our work will be applied to the engineering development of small- and large-scale LEO satellite networks, enabling the deployment of satellite networks with a stable and low-delay network topology. The industry will be led, by the onboard centralized ISL-building planning scheme, to move satellite network ISL-building planning from the ground station to the satellite and further advance the development of the satellite systems in the direction of networking and intelligence. Furthermore, engineering development will be supported by the visibility calculation, which considers the antenna installation angle and the turntable rotation threshold. Additionally, our link-building planning method based on topology stability offers a more practical, user-friendly, and efficient solution.
The onboard centralized ISL-building planning scheme still has shortcomings, regarding its relatively low reliability and robustness. If the primary satellite is lost by accident, it may take some time to re-select the temporary primary satellite by the ground station. During this switching time, the constellation will lose control of the network topology. In the future, we will further study the onboard multi-primary centralized/distributed ISL-building planning and management scheme, with the aim of achieving a highly reliable and error-tolerant network topology.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}