1. Introduction
Coal plays a pivotal role in global power generation owing to its affordability and ubiquitous presence worldwide. However, the greenhouse gas emissions due to the combustion of fossil fuels negatively impact the environment and contribute significantly to global warming [
1]. These environmental concerns are addressed by employing various clean coal energy technologies, for example, the underground coal gasification (UCG) process, that allows the removal of harmful elements at various stages of the UCG process [
2]. UCG process involves drilling two wells from the surface of the earth to the coal beds. The injection well is utilized to inject the oxidants like air and steam into the coal bed. These oxidants then react with the ignited coal, and syngas is produced at the production well [
3]. Syngas is a flammable gas comprising of higher hydrocarbons,
,
, and
, that can be utilized in many applications such as the production of liquid fuel and electric power generation. In comparison to conventional mining and surface gasifiers, UCG provides an efficient and cost-effective solution to produce decarbonized gas without putting human labor in danger underground [
4].
Industrial applications like integrated gasification combined cycle turbines (IGCC) efficiently operate on a constant heating value/calorific value of syngas. The desired heating value can be achieved by controlling the flow rate or molar flux of the injected oxidants [
5]. The presence of parametric uncertainties, modeling inaccuracies, and external disturbances constitutes a challenging control problem that has recently become an emerging field of research [
4].
1.1. Related Work
Both model-free and model-based controllers are designed for a UCG system in the literature, to achieve the desired syngas properties. In [
6,
7], a conventional Proportional Integral (PI) controller is designed to control the temperature, concentration, and heating value of syngas for a lab scale setup for UCG. This model-free controller solely relies on the output measurements. The authors extended their research work to include the effect of uncertainties in the measurements in [
8]. Later, in [
9], an experimental study is investigated to solve a real-time optimization problem for the UCG process. The optimal control design technique is used to maximize the
concentration in syngas. The authors in [
10] conducted an experimental study to achieve the desired calorific value of the syngas by employing an adaptive model predictive control (MPC). In [
11], an Internet-of-Things (IoT) based monitoring system is utilized to assist a deep learning-based optimal control technique. In [
12], the authors conducted an experimental study to optimize oxygen flow, airflow, and syngas exhaust to maximize the heating value of syngas.
The controllers designed in the literature presented above are either model-free or utilize data-driven modeling techniques. However, model-based control strategies are proven to be more accurate. In this regard, a multitude of research is conducted on various model-based control approaches for the UCG process. In [
5], the authors developed a 1-D control-oriented mathematical model of the Thar coal gasifier, which is utilized to design various sliding mode control (SMC) techniques for maintaining a desired level of the heating value. In [
13], a time domain UCG process model is developed. The authors also design a conventional SMC for heating value regulation with the assumption that all the state variables are measurable. To remove this discrepancy, [
14] employs a gain-scheduled modified Utkin observer (GSMUO) to estimate the unmeasurable states required for designing dynamic SMC. Moreover, a time-varying reference is used to test the performance of the control techniques. Considering the required computational complexity and implementation resources for nonlinear techniques, several linear control techniques are also investigated for the UCG system.
1.2. Gap Analysis
The controllers based on linear models can only work near a particular operating point. To cover the whole operating range between no-load and full load, a robust nonlinear controller is required. The tracking error of the heating value does not converge in finite time for all the aforementioned SMC techniques. However, to cater for the abrupt changes in the demand for electric power, the calorific value of the UCG process also needs to change quickly. Therefore, in an IGCC power plant, a robust and finite time convergent SMC, cf. [
15] is required to meet the sudden changes in the electricity demand.
1.3. Major Contributions
In the current research article, a model-based, chattering-free SMC (CFSMC), cf. [
16], is developed for the UCG process model given in [
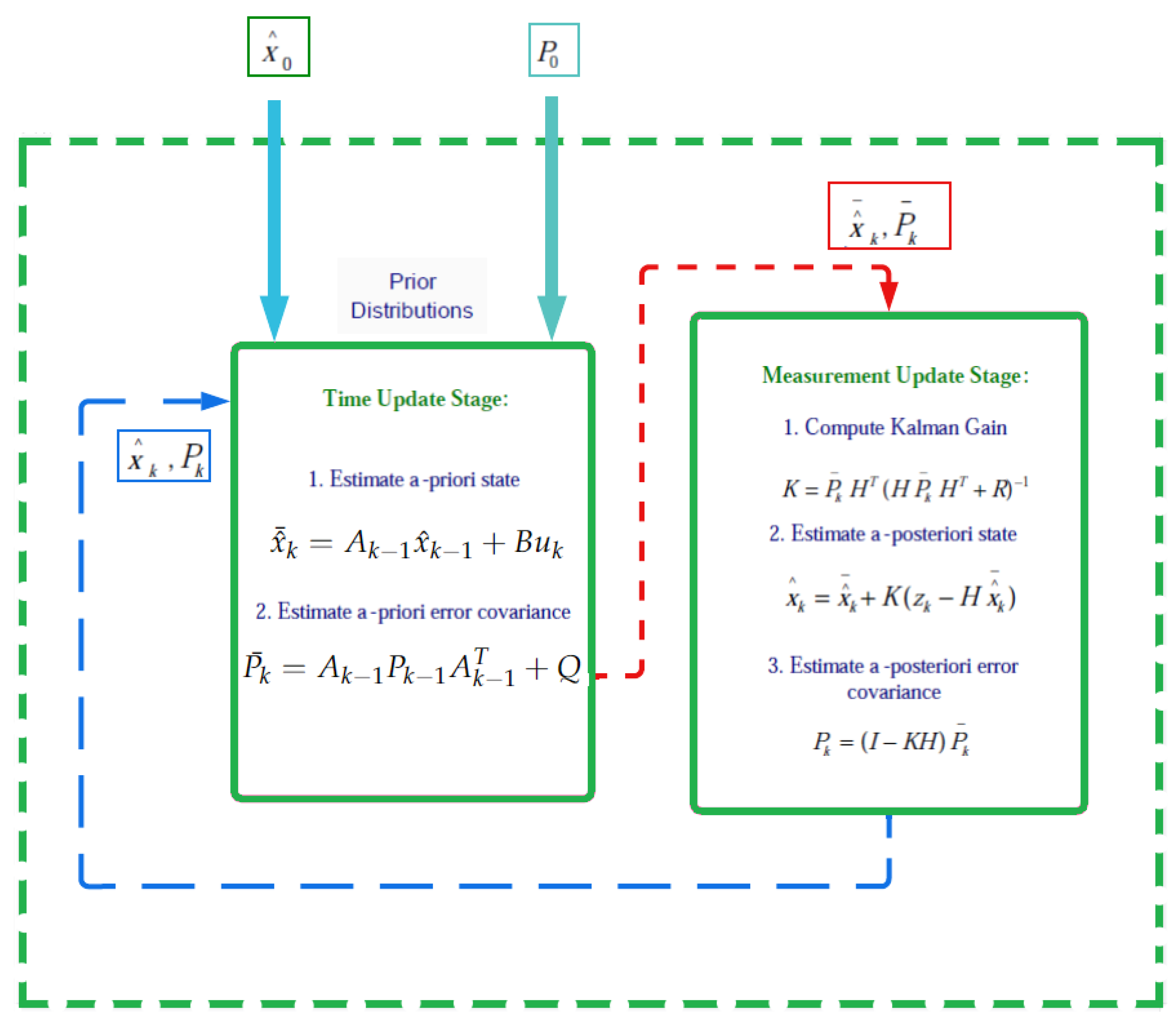
13]. Apart from robustness, CFSMC exhibits less chattering due to continuous control law, and by the virtue of nonlinearity in the sliding surface, the tracking error also converges in finite time. To reconstruct the unmeasurable states necessary for controller design, a state-dependent Kalman filter (SDKF) is designed, which is a linear discrete-time Kalman filter based on the quasilinear model of [
13]. The water influx from the surrounding aquifers is considered as the input disturbance, cf. [
14], to evaluate the robustness of the control scheme. Furthermore, the performance of the SDKF is evaluated by introducing a measurement noise. Simulation results indicate that the designed methodology quickly and accurately tracks the desired heating value trajectory, outperforming conventional SMC and DISMC (cf. [
14]). For brevity, the contributions of the paper are listed below:
A finite-time CFSMC is designed for the UCG process to track the desired heating value trajectory.
The unmeasured states used to synthesize the model-based controller are reconstructed using SDKF.
A thorough quantitative and qualitative comparison is made between the designed technique and already developed techniques for tracking the heating value for the UCG process.
The remaining paper is organized as follows:
Section 2 outlines the control-oriented mathematical model of the UCG plant.
Section 3 and
Section 4 respectively discuss the synthesis of CFSMC and SDKF for the UCG plant. The simulation results are presented in
Section 5, followed by the conclusion in
Section 6 of the manuscript.
2. Mathematical Model of UCG Process
The current study utilizes a nonlinear control-oriented mathematical model of the UCG process, derived in one of our earlier works [
14], for the control design. The mathematical model consists of two solid components: char and coal, and eight gaseous components:
,
,
,
,
,
,
, and tar. Moreover, the model incorporates the effect of water influx from the nearby aquifers as the disturbance. The following mathematical equations describe the nonlinear control-oriented UCG model
The UCG model includes a number of parameters and variables that are listed in
Table 1 and
Table 2 provides the nominal values of the parameters.
Pyrolysis of coal, oxidation of char, and gasification of steam are dominant chemical reactions of the current model of the UCG process and are expressed in
Table 3. Molecular formulas of coal, char and tar are respectively
,
, and
. The reaction rates of chemical reactions:
,
and
are expressed in (
2).
where,
the molar fractions
and
are expressed as,
where
The nonlinear control-oriented model (
1) can be expressed in a control-affine form as
where
is the state vector,
u is the control input,
are smooth vector fields, and
is considered as the external disturbance. The vector of states
x is chosen as
Vector fields
,
, and
are given by (
6)–(
8), respectively
The measurement vector
represents the concentration of the gases measured from the gas analyzer
The heating value
of the syngas is the variable to be controlled, characterized as
where
, and
,
, and
represent heat of combustion (kJ/mol) of
,
and
respectively.
The objective of the control design is to keep the heating value at the desired level based on the operating conditions, such as the usage of char and coal in the UCG bed. Hence, the next section will focus on the design of the controller.
3. Chattering Free Sliding Mode Control Design
This section presents the design of a CFSMC with the aim of following the desired syngas heating value (
). Despite being a promising solution, the implementation of the sliding mode-based control law may result in high-frequency oscillations, known as chattering, because of modeling errors, external disturbances, and discretization. Chattering is a common issue with sliding mode controllers; however, by the virtue of smoothening terms in the control law and the sliding surface, CFSMC can effectively resolve the issue of chattering [
17]. Moreover, a carefully designed sliding surface ensures the finite time convergence of the tracking error. Furthermore, conventional SMC often has the disadvantage of producing discontinuous control inputs that do not meet the requirement of the current system. Therefore, the above-mentioned issues associated with the conventional SMC are addressed in this paper by a systematic design of CFSMC [
16].
The output to be controlled is the difference between the actual
and its desired trajectory
,
. The control input
u appears after differentiating
e once, which inferred that the relative degree of the tracking error
e is 1 with respect to the control input
u. Therefore, differentiating the error
e with respect to time results in the following error dynamics
where
,
, and
are smooth and nonlinear functions of states.
It is pertinent to mention here that
and
are the nominal parts of the system, whereas
includes the perturbed part of the system influenced by a smooth and bounded input disturbance
. Considering the control-oriented model given in (
4) and reaction rate expressions in (
2), it can be observed that the input disturbance affects
and
by changing the concentration of steam. The functions
,
and
are defined as
where
and
are errors between perturbed and nominal reaction rates, and
.
Now, to mitigate error within a finite time, a terminal sliding manifold is chosen for the system in (
11) as
where
c and
are design parameters. The value of
c is selected such that the polynomial
, which corresponds to the system (
13), is Hurwitz, meaning its eigenvalues are in the open left half of the complex plane, with
as a Laplace operator. By selecting appropriate values of
c and
, the ideal sliding mode
for the error dynamics (
11) can be achieved, resulting in the system converging to its equilibrium point,
, from any initial condition along the sliding surface
in a finite amount of time [
16]. Hence, the control law is chosen as
where
where
are gains of the controller. The constants
T and
are selected such that
, where
.
The validity of the sliding mode, i.e., whether the trajectories converge to the manifold is proved in the subsequent subsection.
Existence of Sliding Mode
By using (
11) and (
14), Equation (
13) can be re-expressed as
Now, to prove that the above surface is attractive, a positive definite candidate Lyapunov function is chosen
whose time derivative determined as
where
is the time derivative of
, and it is smooth and bounded:
.
Now by selecting
and
we can write (
17) as
which shows that the system in (
11) will reach
in finite time [
16].
5. Results and Discussions
This section presents simulation results of the UCG process along with CFSMC and SDKF. MATLAB/Simulink (Version: R2018a, running on Laptop: Lenovo i3, 3rd generation with 4GB Ram ) is utilized to perform the simulations. A qualitative and quantitative comparison is carried out between the conventional SMC, dynamic integral SMC (DISMC) [
14], and the proposed CFSMC for desired trajectory tracking of the calorific value. A modified gain-scheduled Utkin observer (GSMUO) estimates the unmeasurable states for DISMC; however, SDKF is used to reconstruct states for SMC and CFSMC. To replicate the real-time conditions, a comprehensive simulation study is performed, taking into account the practical considerations listed below:
A white Gaussian noise with a zero mean and a variance of
is added to
. This variance is selected based on the typical accuracy of the gas analyzer used for taking measurements in the UCG process [
5].
The values of
,
, and
are chosen to be
,
, and
, respectively in (
1).
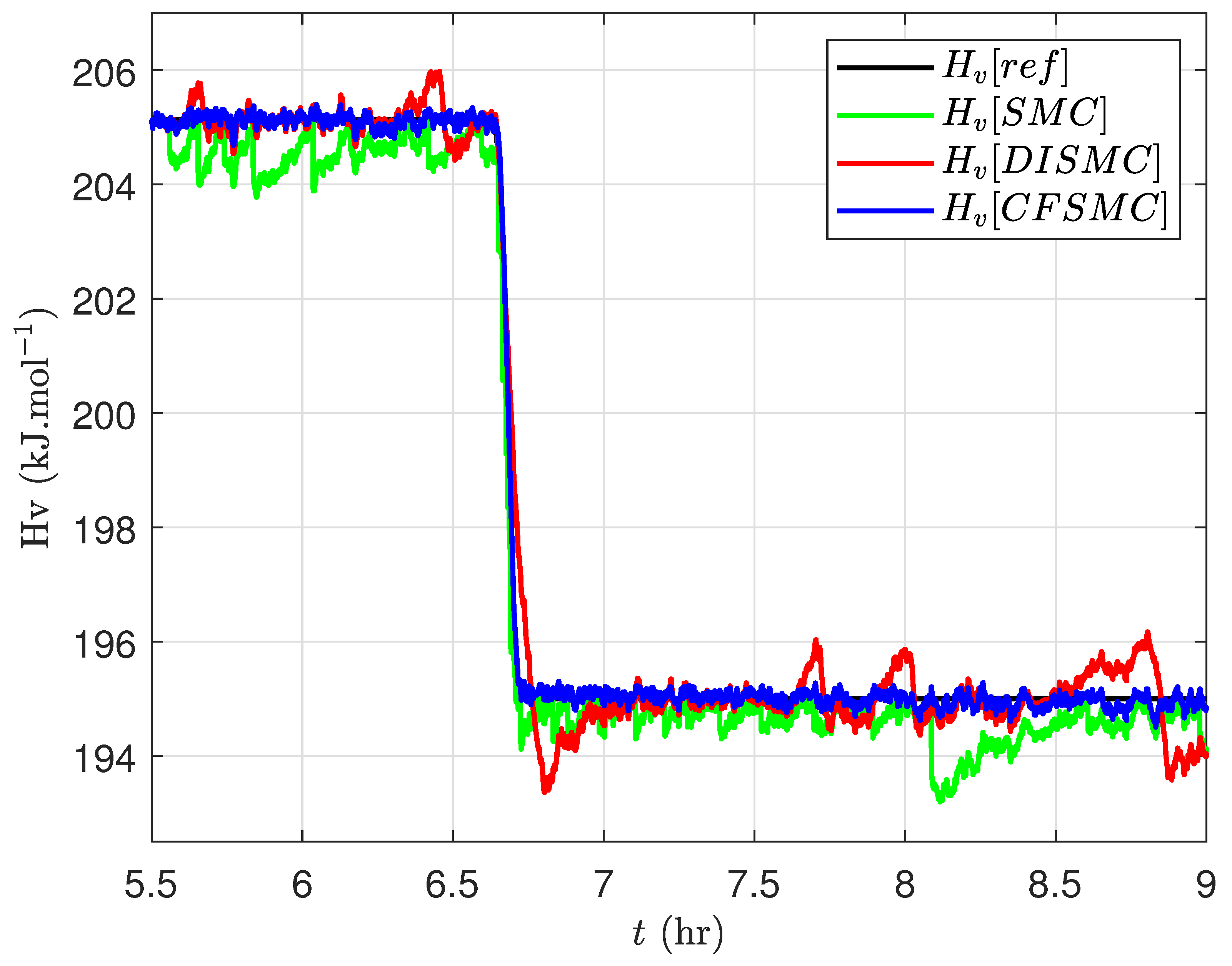
The desired heating value trajectory is expressed in
Figure 2, which represents a sudden change in the demand for electricity generation.
The total simulation time is 9 h. To ensure that the heating value reaches the appropriate set point, the UCG system is run in an open loop for initial h. The flow rate of gases is maintained at moles during this time. Afterward, the UCG system is run in a close loop configuration for h. Therefore, for better visualization, the simulation results for evaluating the performance of the controllers are only shown for the closed-loop operation.
SDKF works for the complete simulation, i.e., h.
The gains of CFSMC in (
13) and (
14) are:
,
,
,
,
, and
.
The tracking performance of the selected controllers is shown in
Figure 2. The reference trajectory shows a sudden change from a higher to a lower level of the heating value. To track the abrupt change in the reference trajectory, the gains of the controllers are kept on the higher side, which results in poor performance of SMC and DISMC as compared to CFSMC.
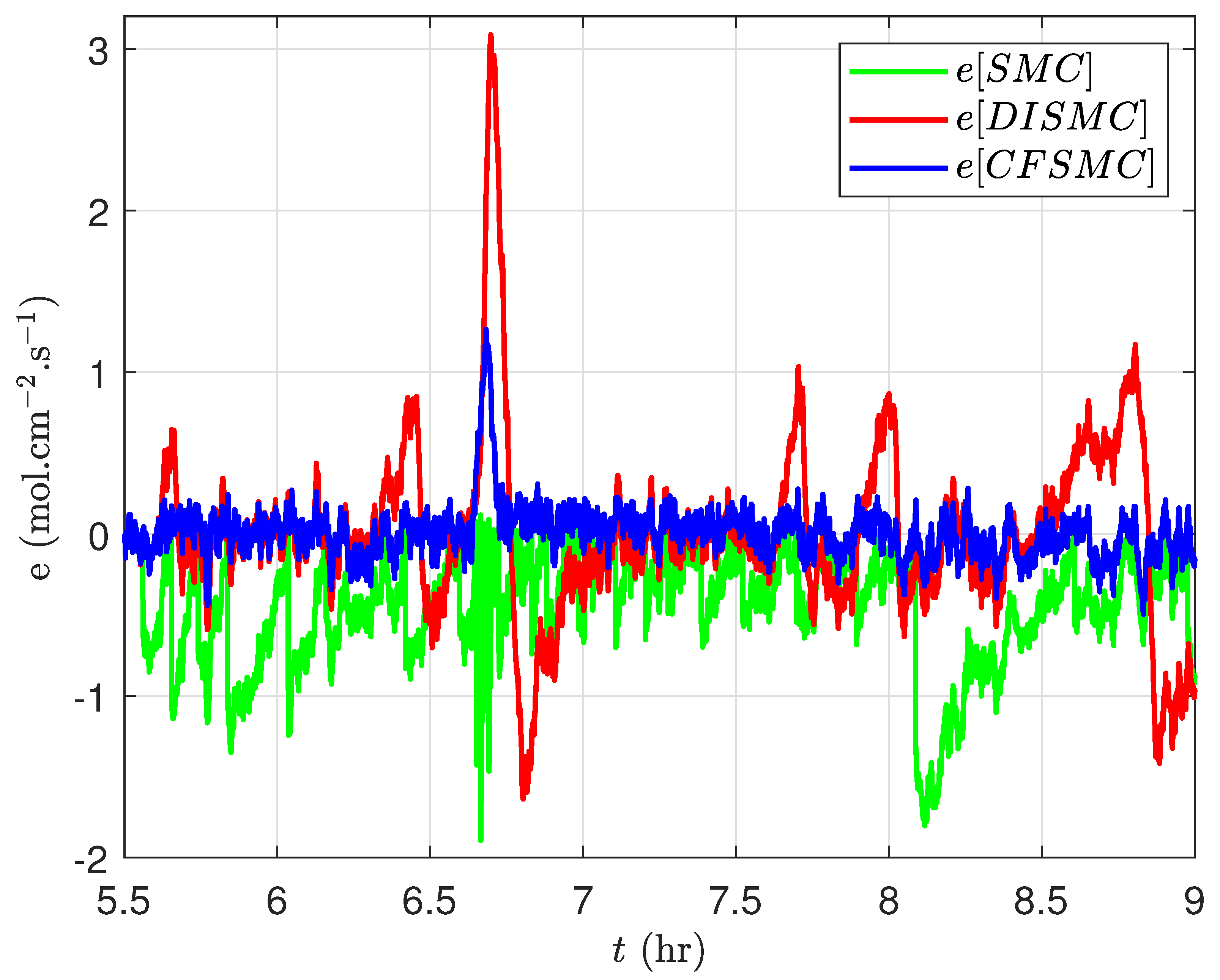
Figure 3 depicts the tracking error of different control schemes.
The manipulated flow rate of the inlet gases for different control schemes is presented in
Figure 4. It is evident from the figure that the tracking performance of CFSMC is the most superior as compared to DISMC and SMC.
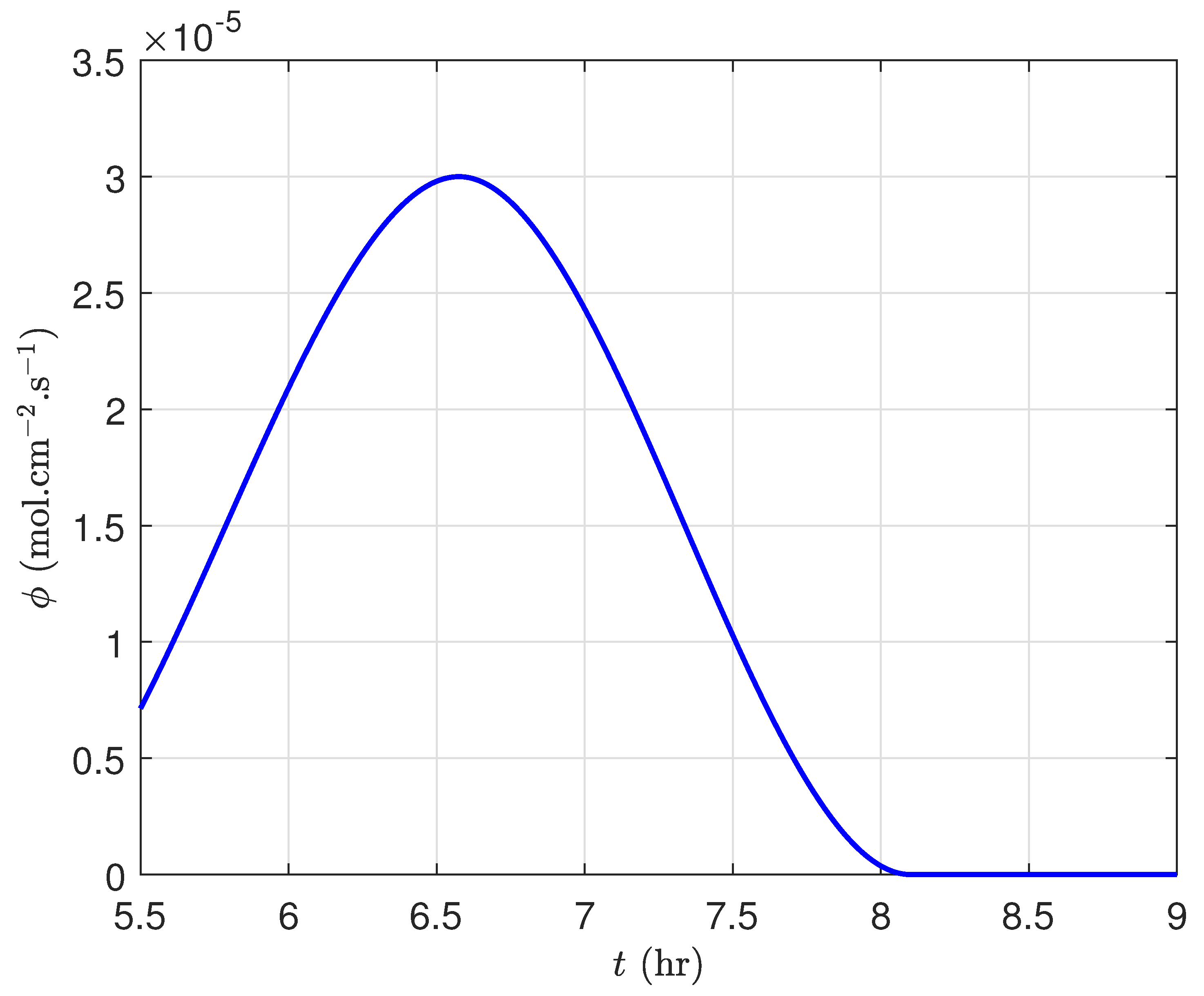
A sufficient amount of steam is necessary to ensure the smooth operation of the UCG reactor. Generally, there are two sources of steam: a mixture of the inlet gas (which in the current case contains
steam) and water ingress from surrounding aquifers, which is considered as an external disturbance, and its time profile is depicted in
Figure 5. It is evident from
Figure 4 that all the controllers manipulate
u to mitigate the effect of
. However, the results in
Figure 2 and
Figure 3 demonstrate that CFSMC exhibits more robustness to compensate
as compared to DISMC and SMC.
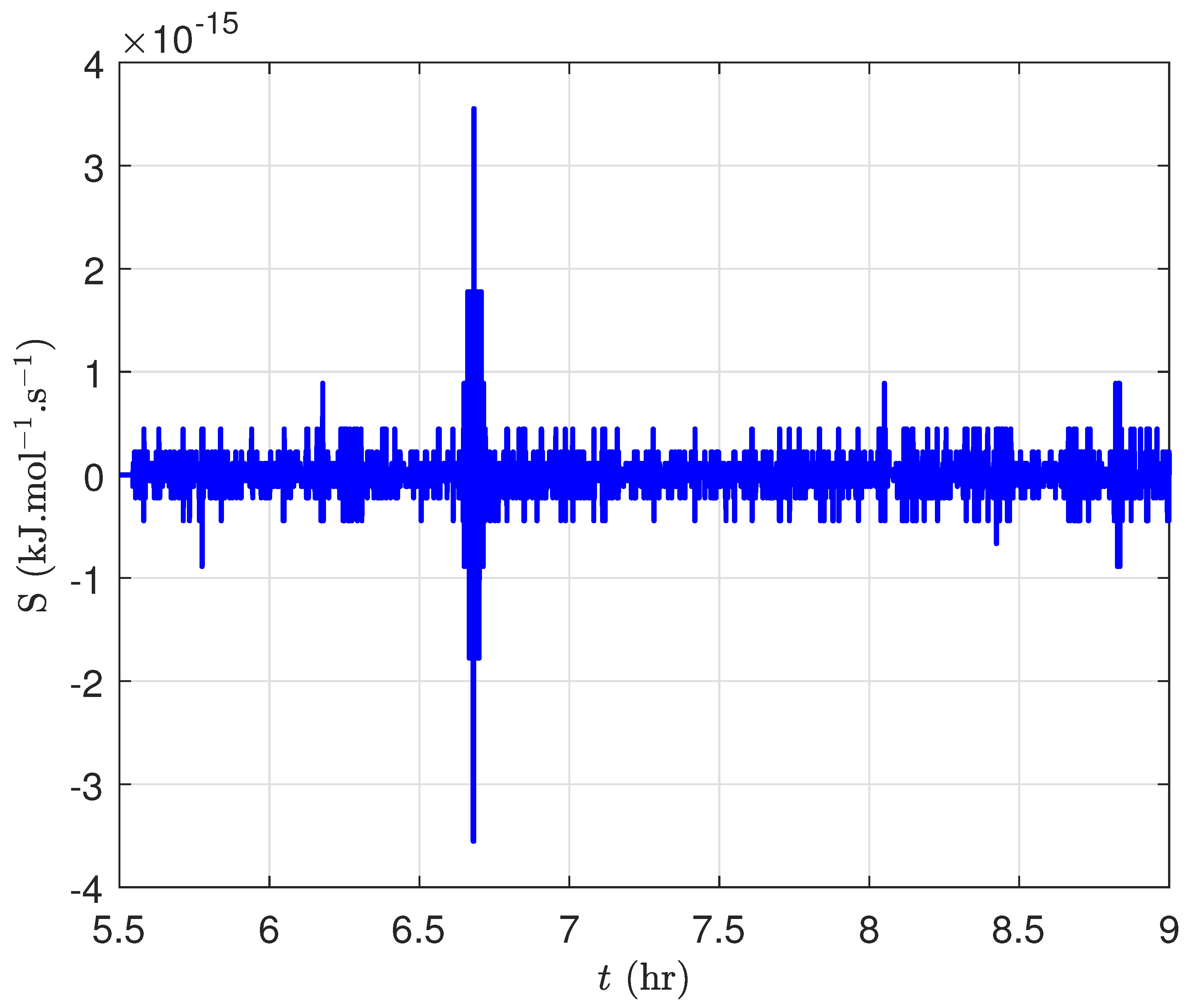
Figure 6 shows the sliding variable designed for CFSMC, which is given by (
13). Despite the disturbance and measurement noise, the system trajectories are confined to the manifold
.
A comprehensive quantitative analysis has been performed to assess the performance of CFSMC, DISMC, and SMC. The attributes considered for performance evaluation are root mean squared error
and the average power
of the control input
u. These performance indices are characterized as
where
N represents the number of samples.
The values of the performance indices for CFSMC, DISMC, and SMC are provided in
Table 4. Here, it can be seen that all the controllers consume the same control energy; however, the performance of CFSMC is superior to its counterparts. In fact, CFSMC shows
and
better tracking performance than SMC and DISMC, respectively.
The remaining part of the section discusses the performance of SDKF. To evaluate the estimation performance of SDKF; it is essential to start the UCG plant and GSMUO with contrasting initial conditions. The initial state vectors for the UCG process model and SDKF are selected as
It is pertinent to mention that some values in and are equal or very close to each other; this is because the initial values of some states are known.
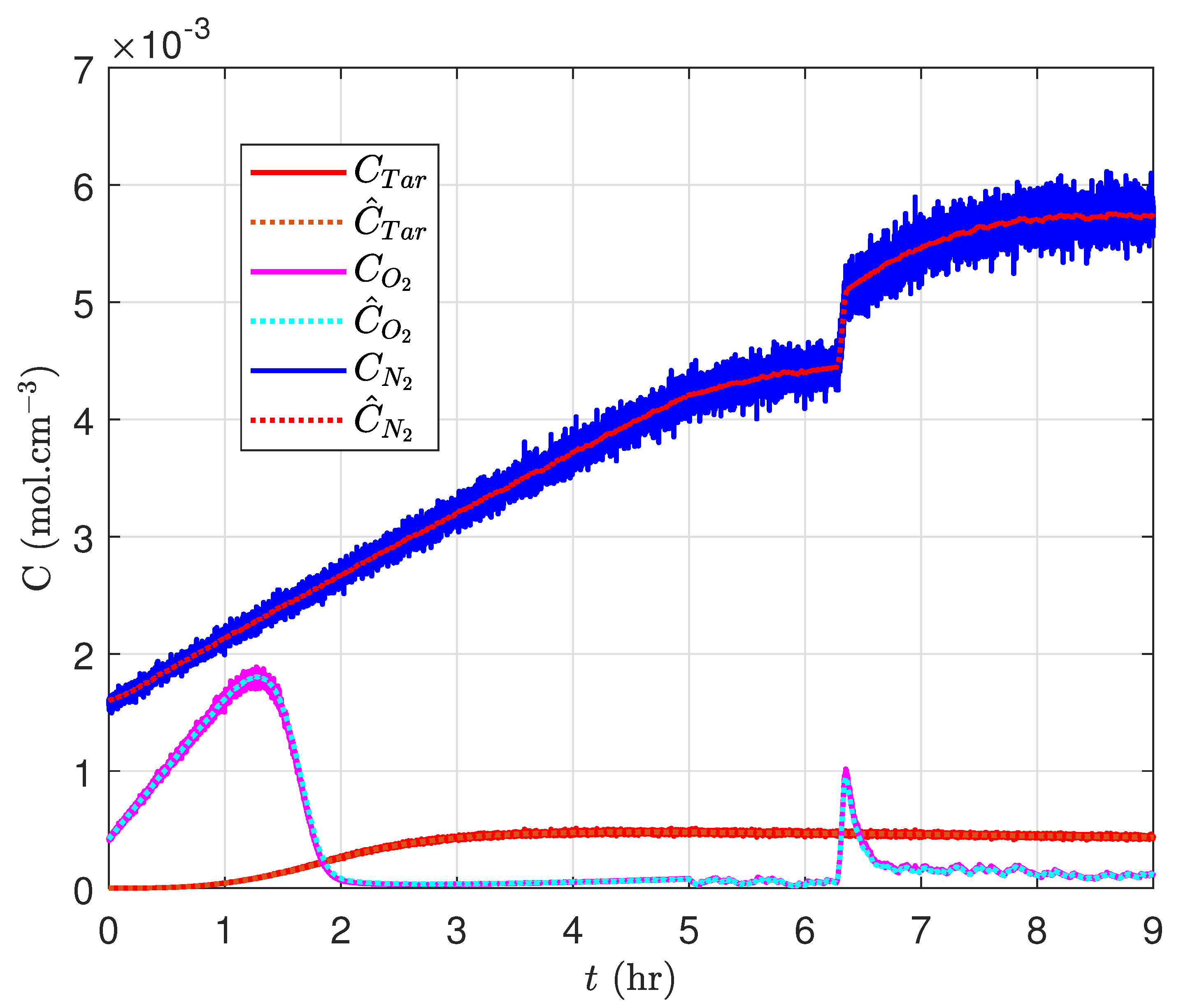
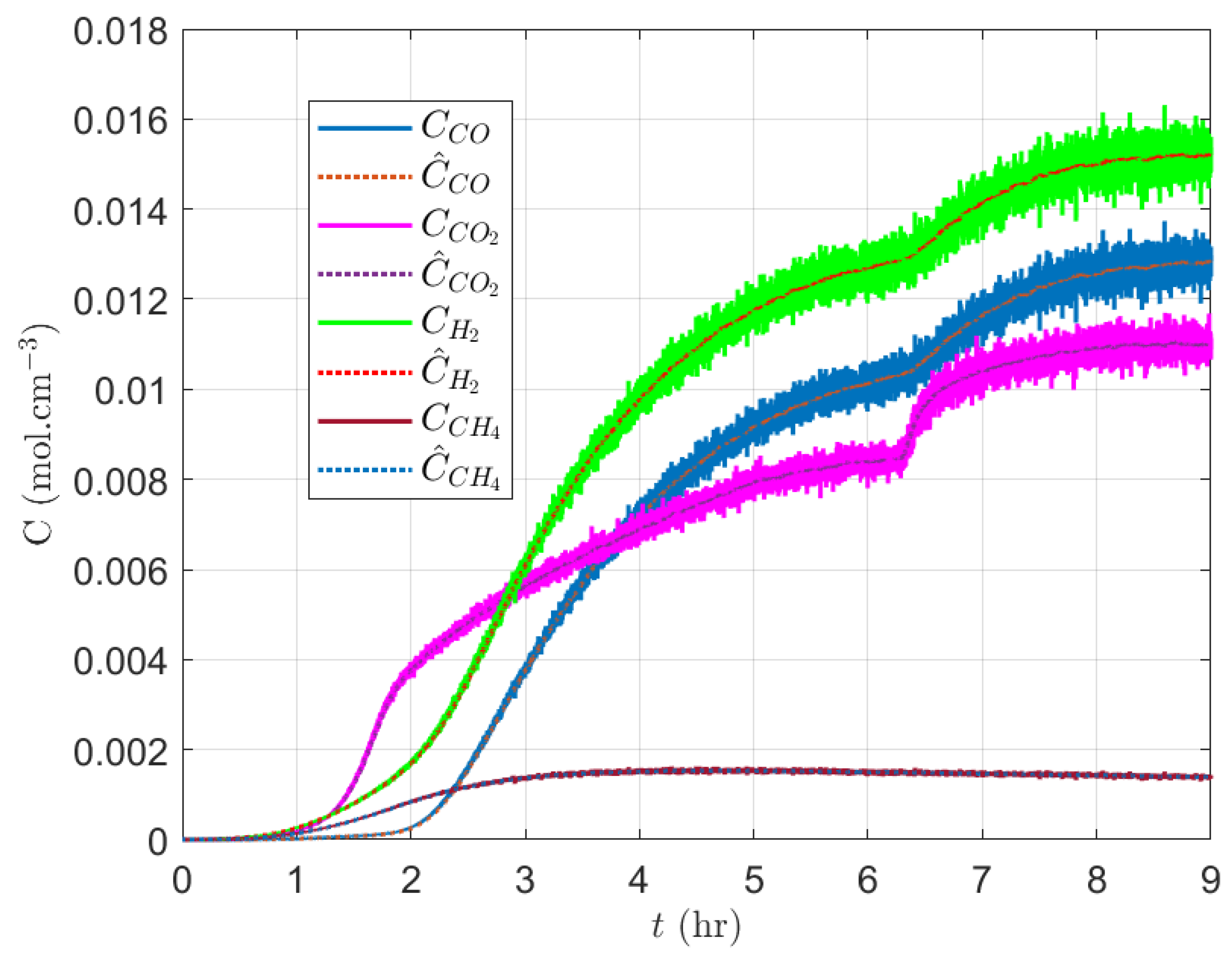
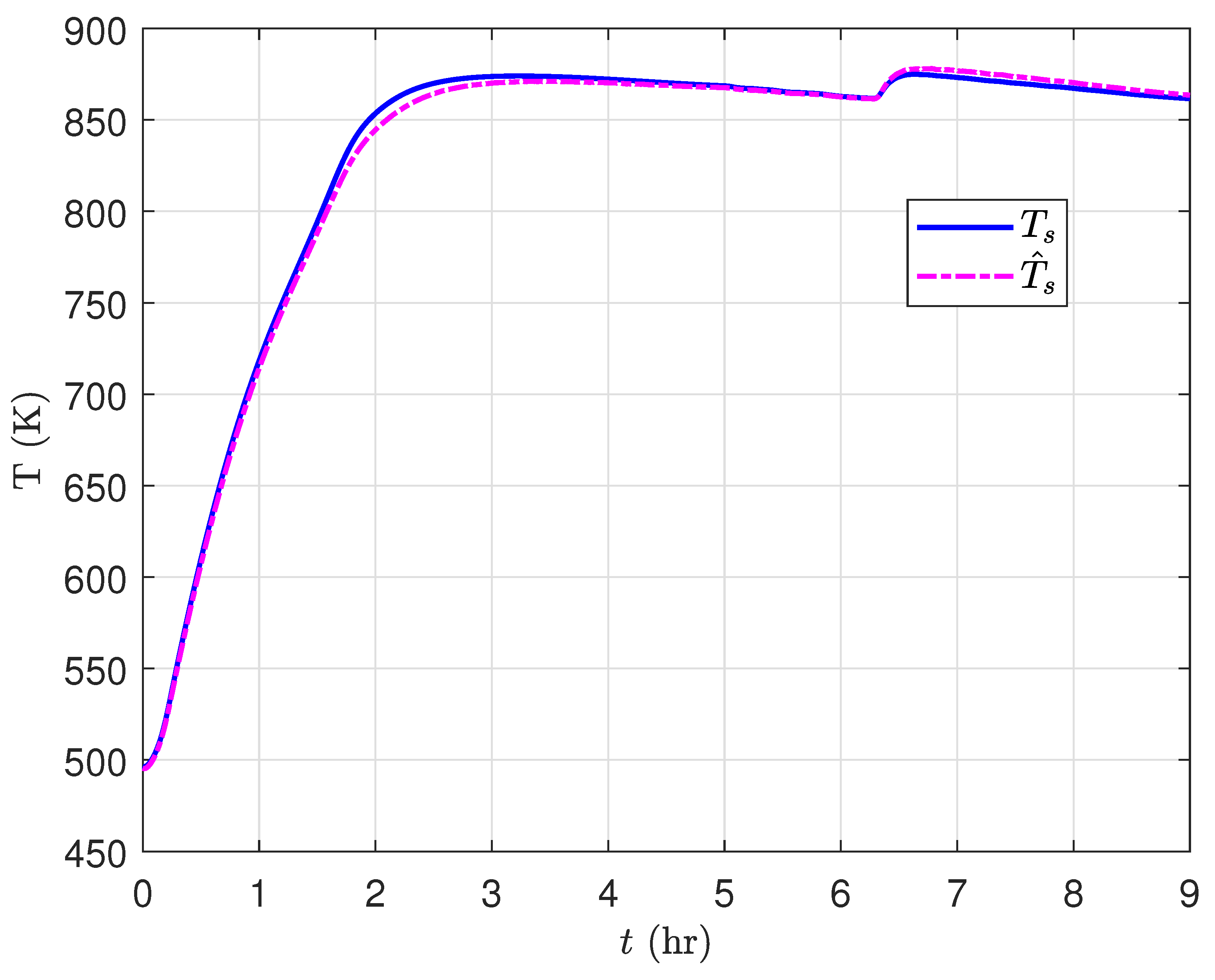
Seven out of eleven states are measurable, but a full state SDKF is designed so that the measurement noise can be filtered. The results in
Figure 7 and
Figure 8 demonstrate how SDKF filters out the measurement noise from the measured states. The estimated states are then used for the synthesis of the controller.
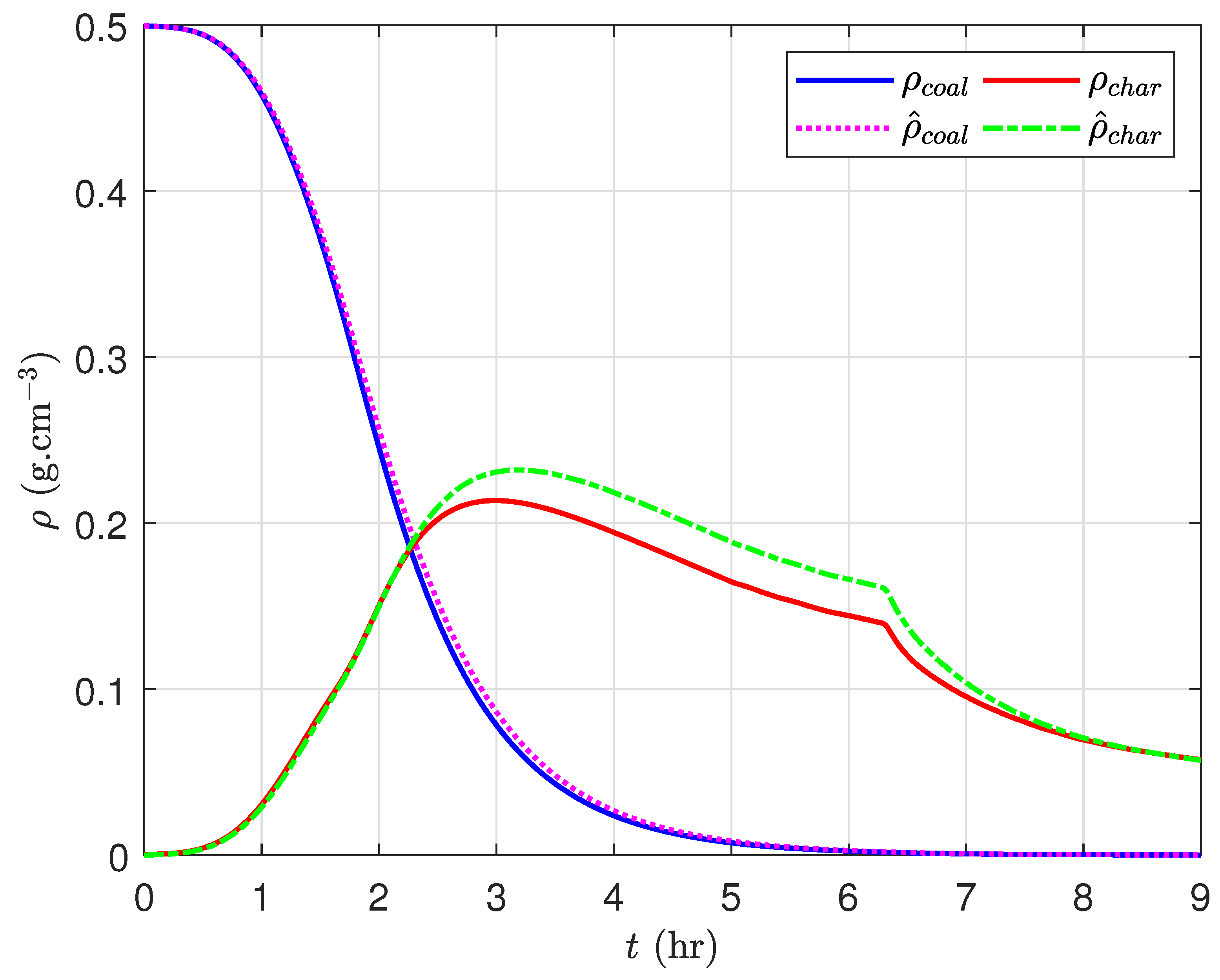
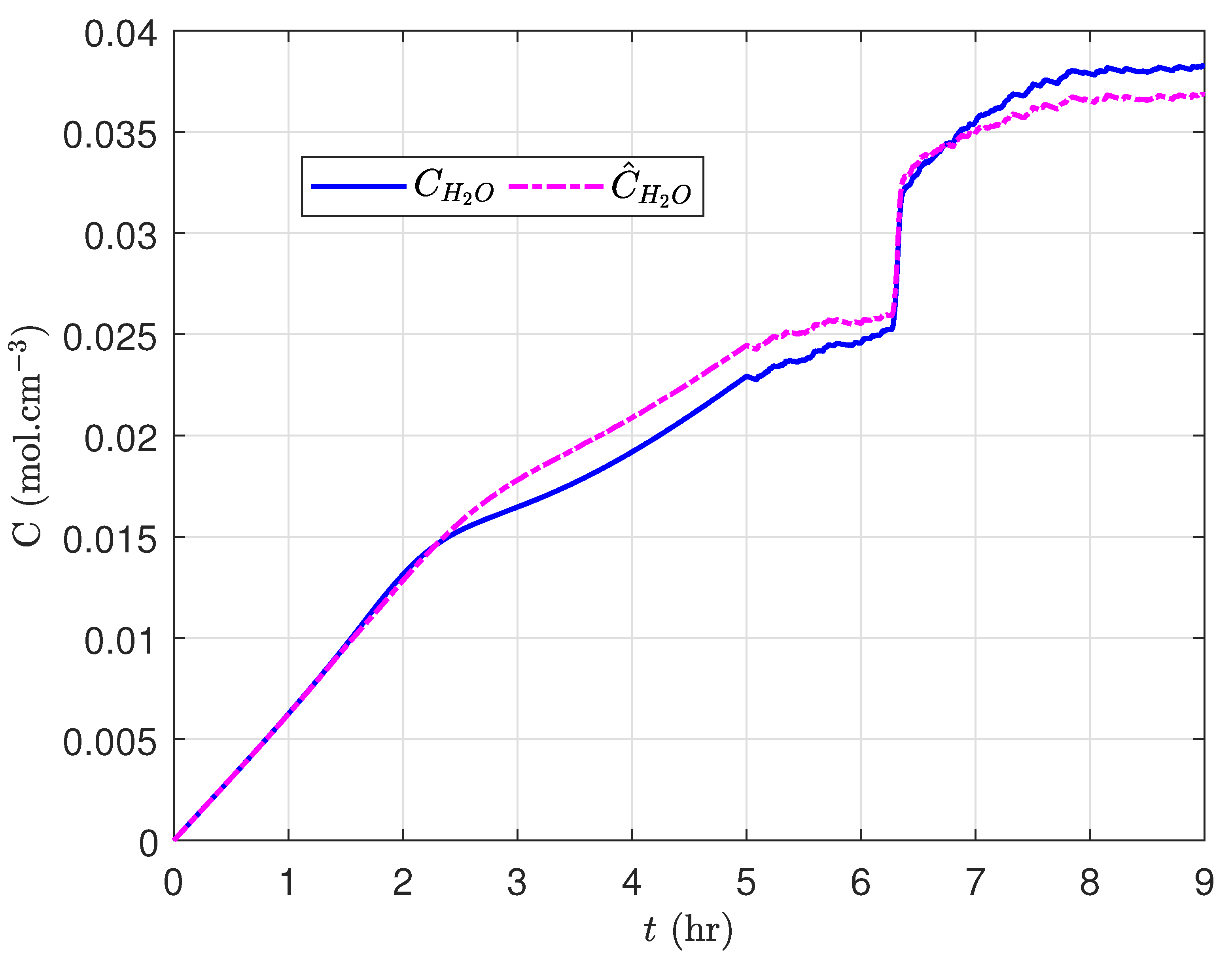
Figure 9,
Figure 10 and
Figure 11 depict the estimation of the unmeasurable states of the UCG model. It is evident from the simulation results that the estimated and actual states are well aligned. The difference in the true and estimated values of the steam concentration is due to the disturbance
.
From the simulation results and comparative analysis of different control techniques, it can be seen that the performance of SDKF is slightly better than GSMUO designed in [
14]. However, the design of GSMUO is quite complex as compared to SDKF, which is simply a linear discrete-time Kalman filter implemented using the quasi-linear UCG model.
6. Conclusions
In this study, a model-based CFSMC is proposed for tracking the desired heating value trajectory of the UCG process in the presence of external disturbance and measurement noise. A formal analysis of the stability of the controller is also presented. To enable the feedback control design, the unmeasurable UCG process states are estimated by utilizing SDKF, which is based on the quasi-linearization of the nonlinear UCG model. A detailed qualitative and quantitative comparison is also made between CFSMC-SDKF, SMC-SDKF, and DISMC-GSMUO techniques. The comparison demonstrates that the CFSMC-SDKF technique outperforms its counterparts for a rapidly changing reference trajectory.
A possible future extension of this work is the cascade control of the IGCC power plant, which is comprised of the UCG plant and a combined cycle turbine. The efficacy of this technique can be analyzed for tracking the sudden variations in the demand for electrical power.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}