
Probability-Based Diagnostic Imaging of Fatigue Damage in Carbon Fiber Composites Using Sparse Representation of Lamb Waves
Abstract
:1. Introduction
2. Damage Factor Extraction Based on Sparse Representation
2.1. Sparse Representation Theory
2.2. Lamb Wave Sparse Representation Based on Fast Block-Sparse Bayesian Learning Algorithm
2.3. Damage Factor Based on Lamb Wave Sparse Representation
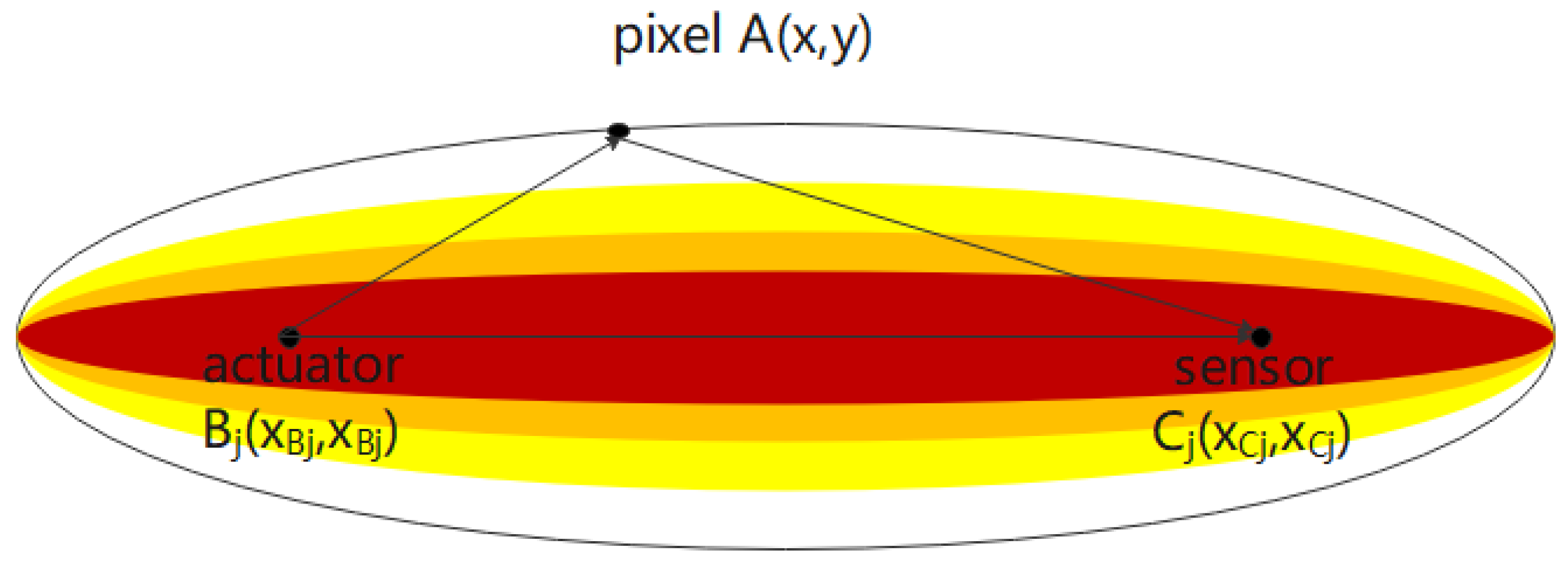
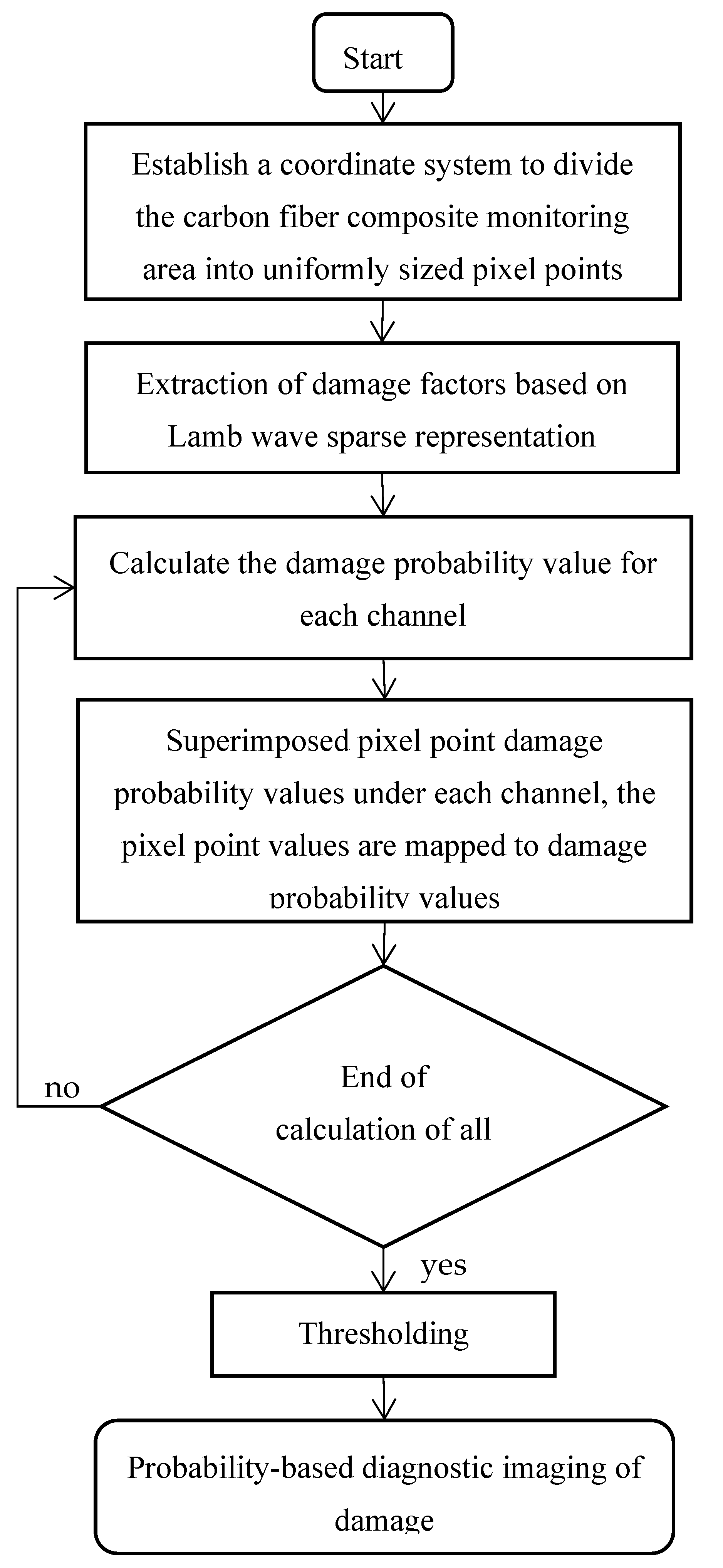
3. Damage Probability Imaging Based on Lamb Wave Sparse Representation
4. Experiment and Analysis of Experimental Results
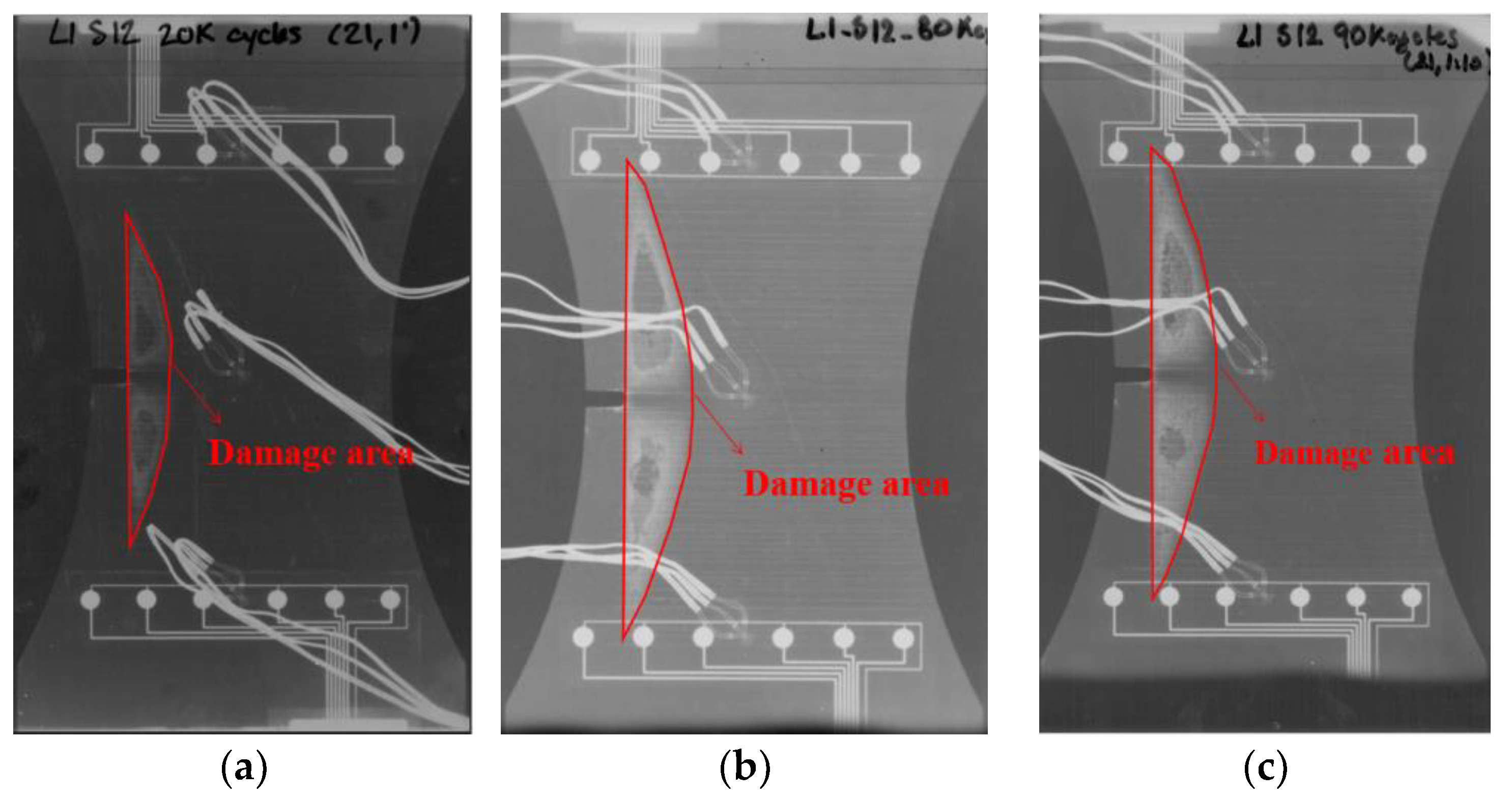
4.1. Fatigue Damage Experiment of Carbon Fiber Composite Materials
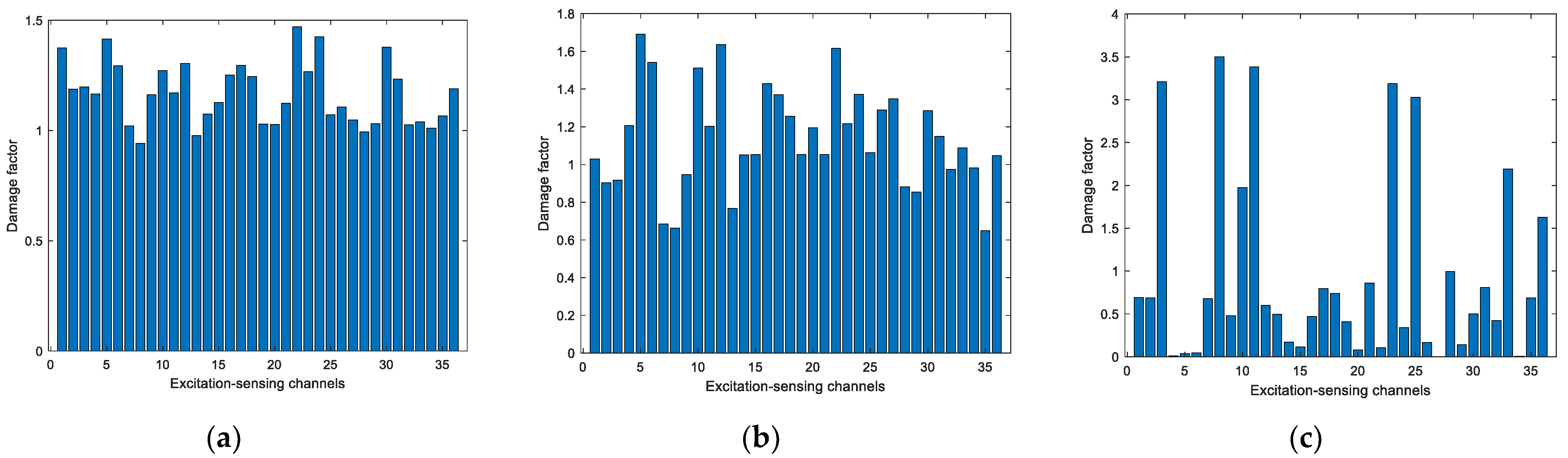
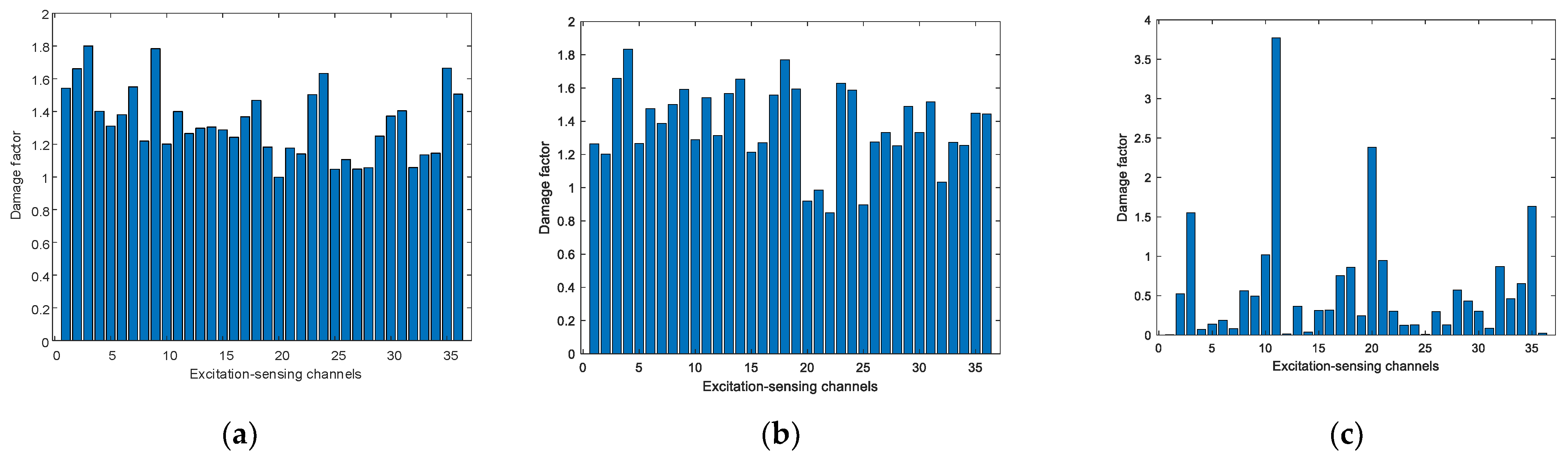
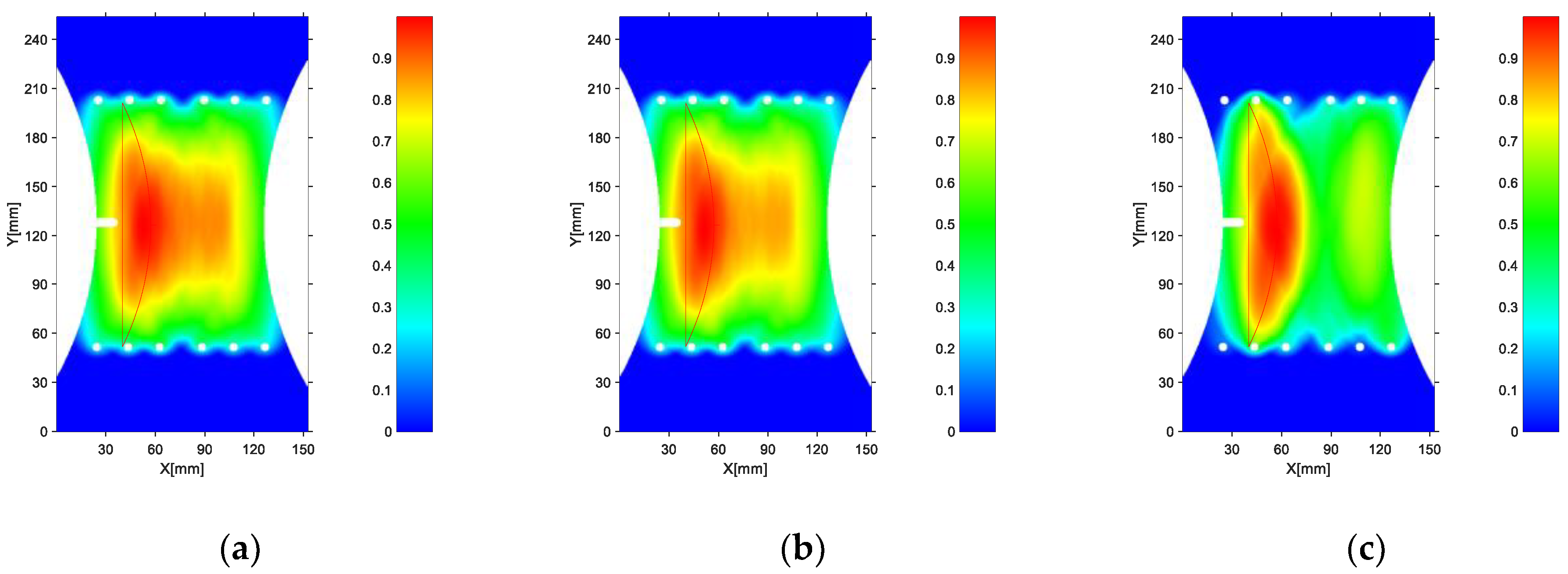
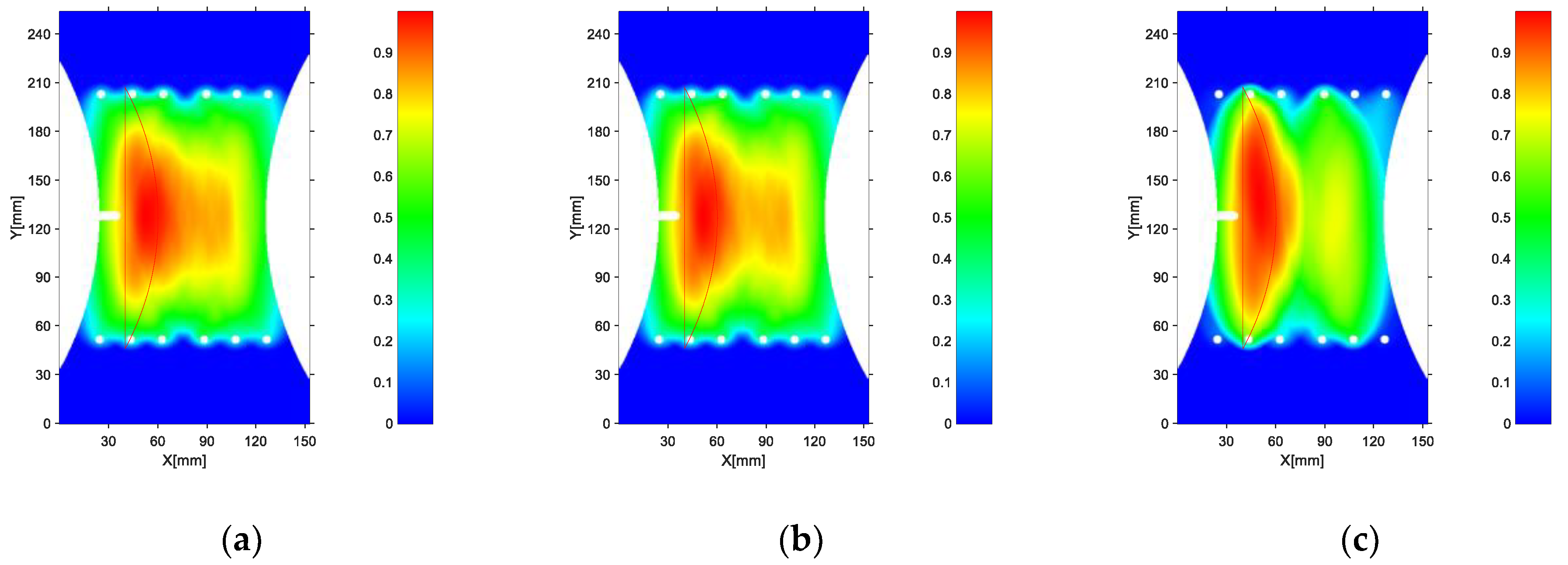
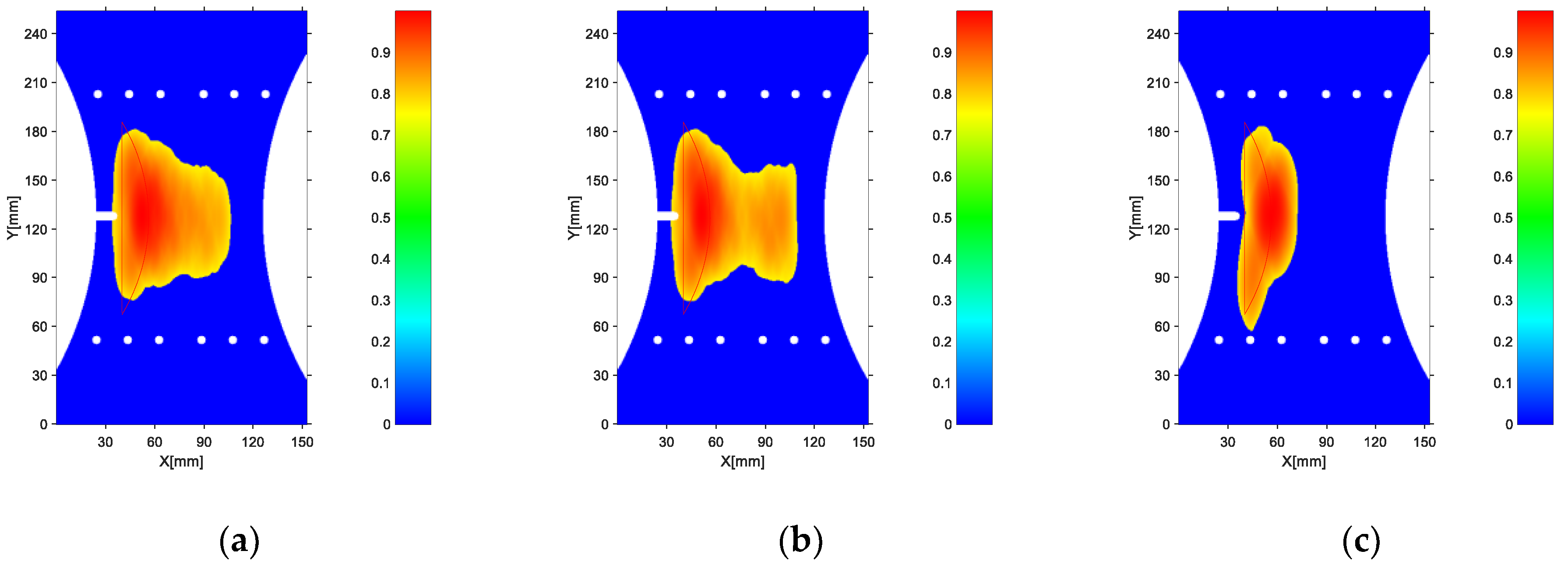
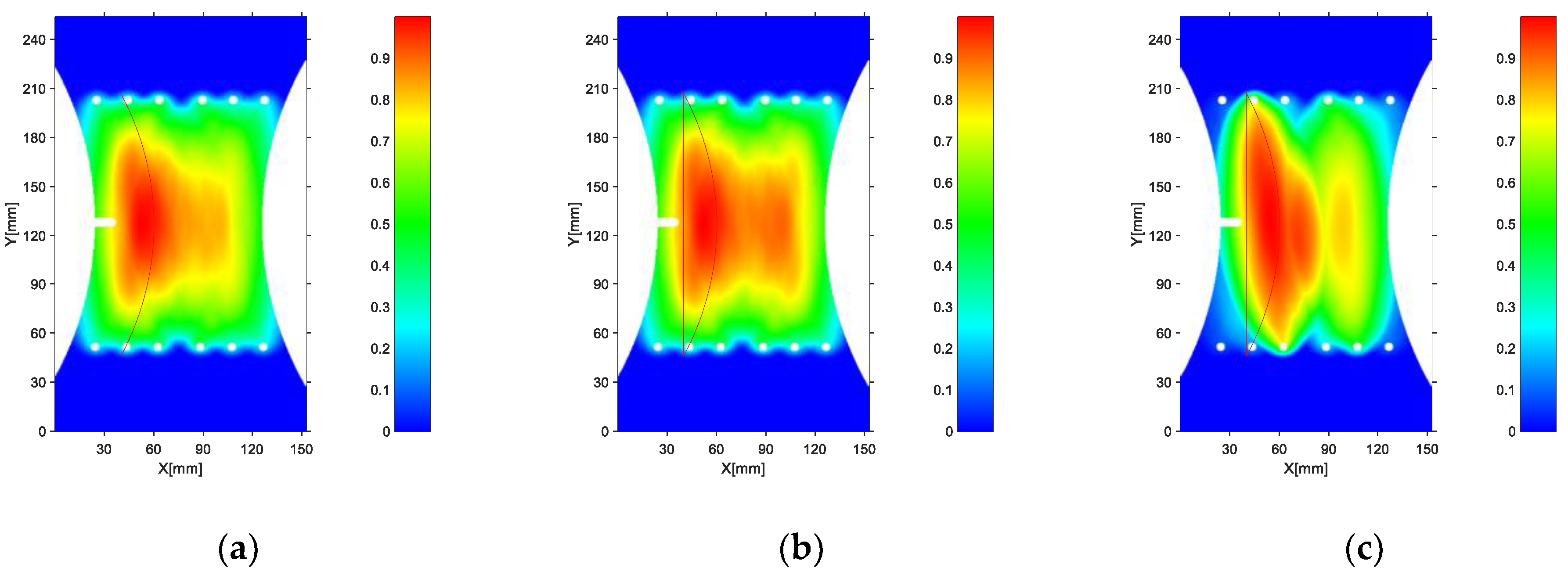
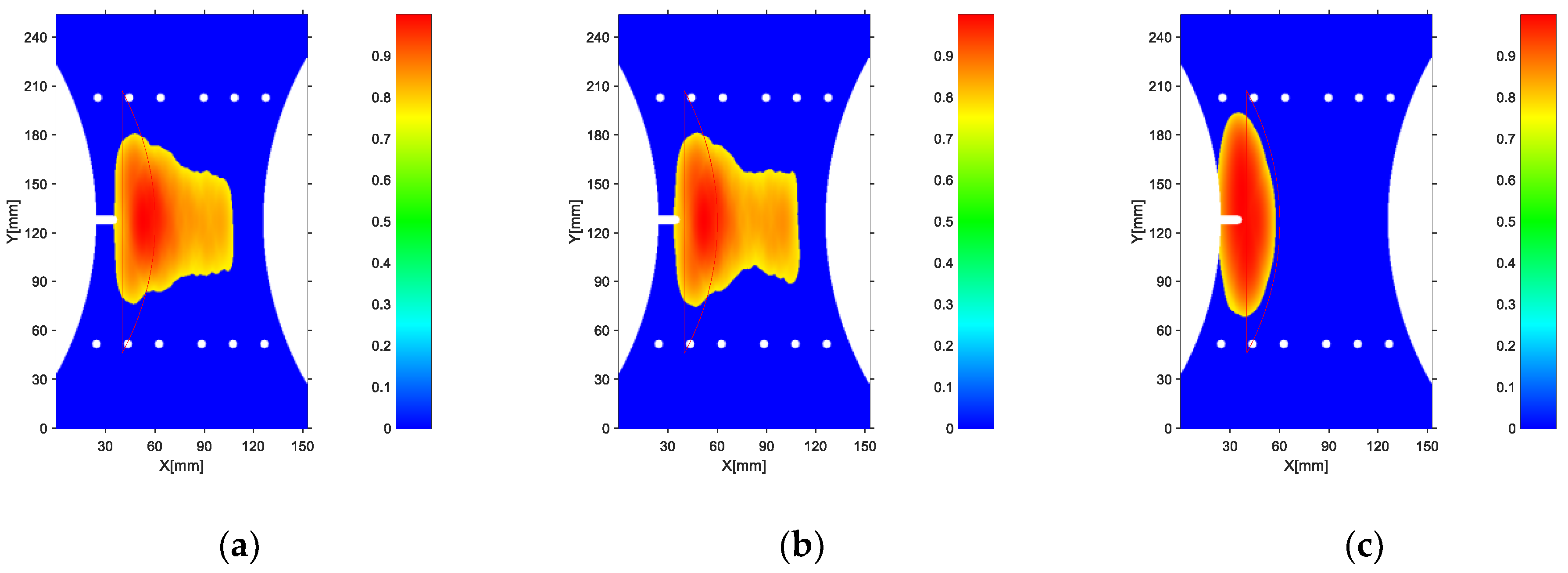
4.2. Comparison and Analysis of Imaging Results with Different Damage Factors
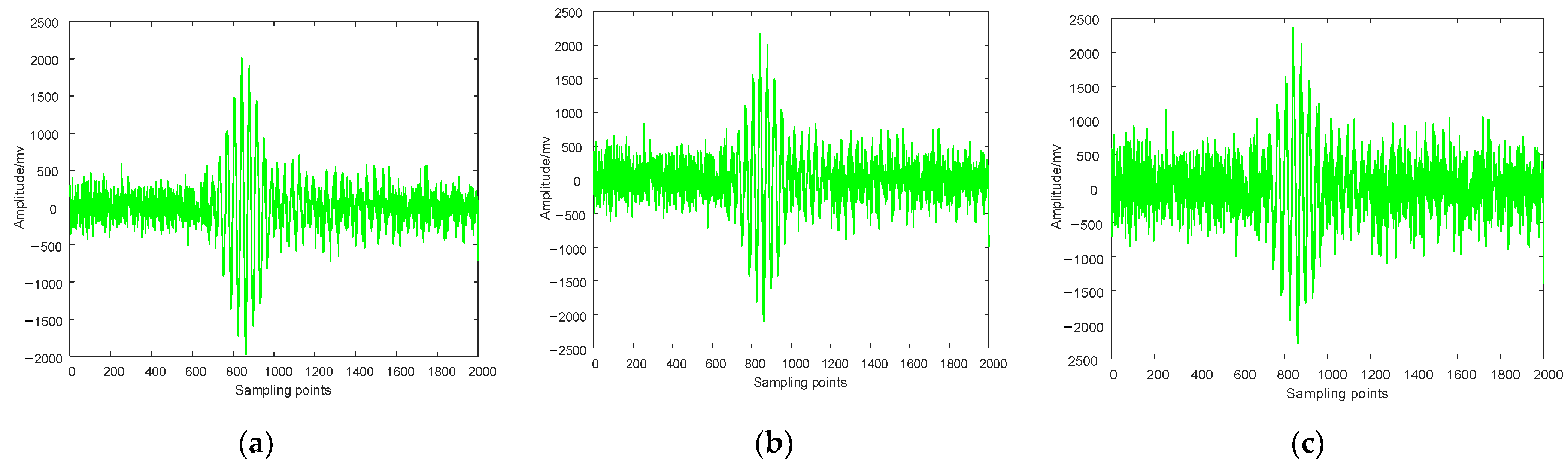
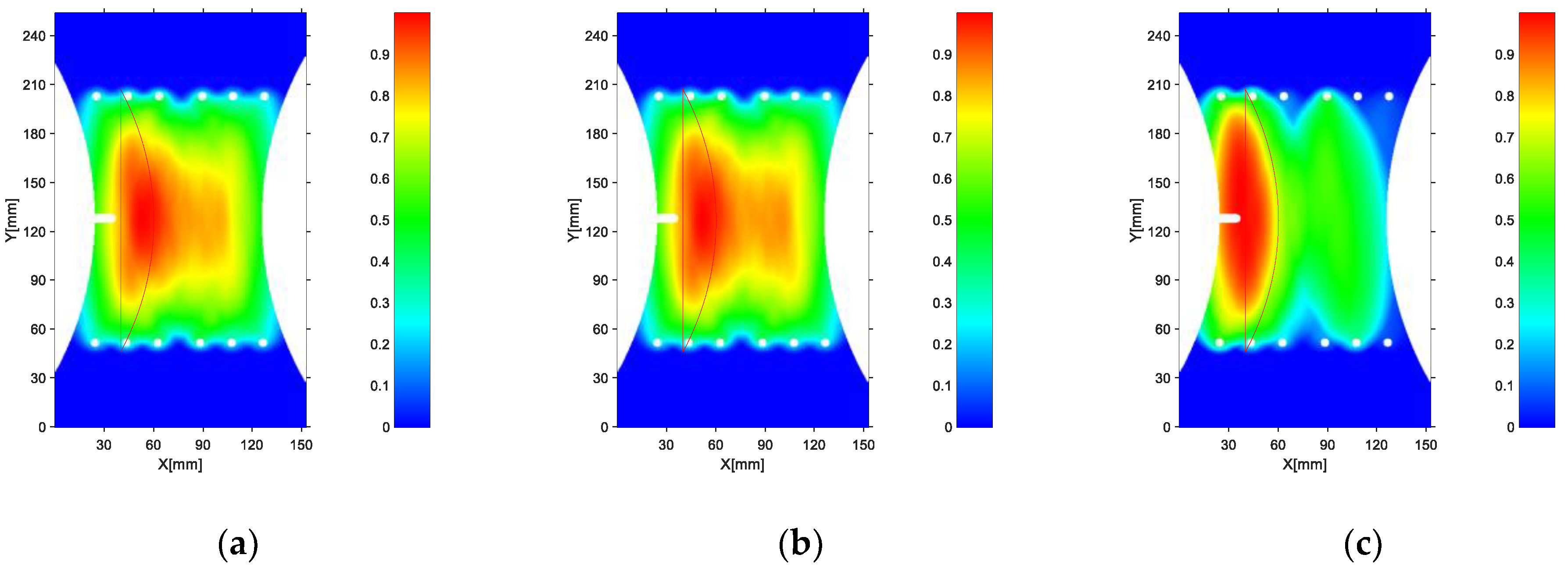
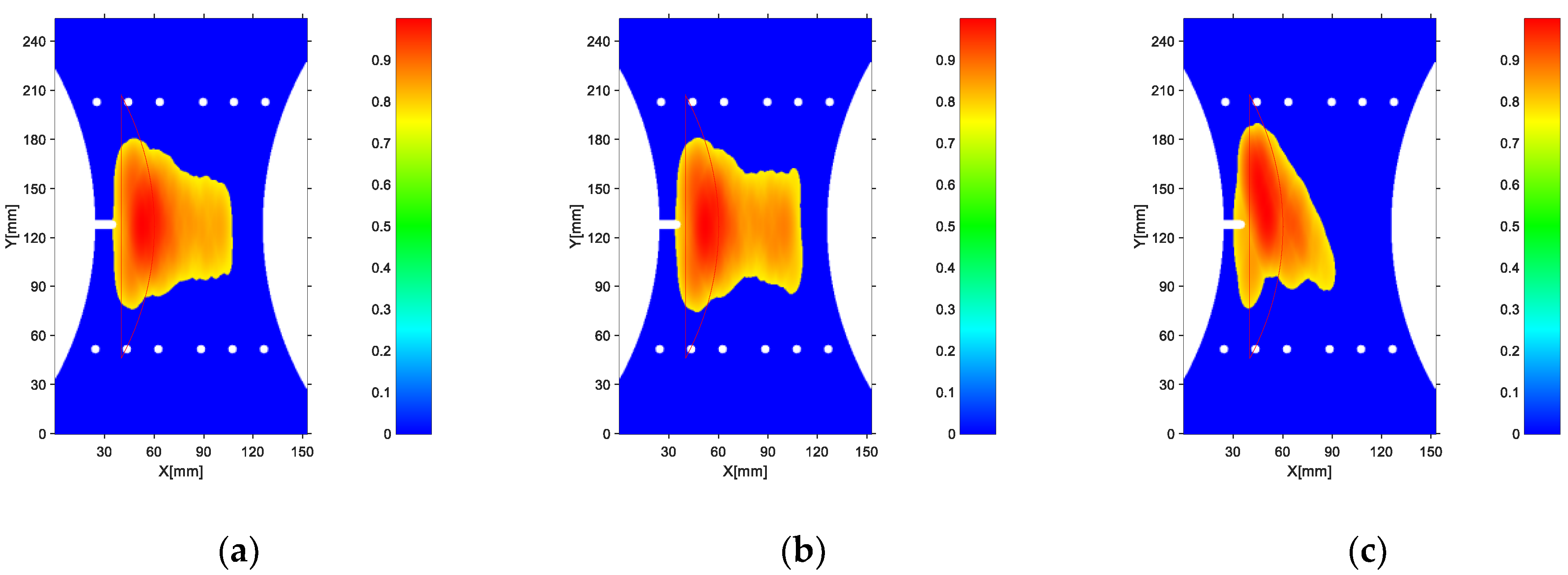
4.3. Comparison and Analysis of Imaging Results under Different Noise Intensity Environments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; Luo, D.; He, Y.; Zhang, X.; Chen, S.; Xiao, Y. CFRP Barely Visible Impact Damage Inspection Based on Nonlinear Ultrasound Signal Sparse Reconstruction. IEEE Sens. J. 2018, 18, 6303–6310. [Google Scholar] [CrossRef]
- Atkinson, G.A.; Nash, S.O.; Smith, L.N. Precision Fibre Angle Inspection for Carbon Fibre Composite Structures Using Polarisation Vision. Electronics 2021, 10, 2765. [Google Scholar] [CrossRef]
- Liu, Z.; Yu, H.; Fan, J.; Hu, Y.; He, C.; Wu, B. Baseline-free delamination inspection in composite plates by synthesizing non-contact air-coupled Lamb wave scan method and virtual time reversal algorithm. Smart Mater. Struct. 2015, 24, 045014. [Google Scholar] [CrossRef]
- Qing, X.; Li, W.; Wang, Y.; Sun, H. Piezoelectric Transducer-Based Structural Health Monitoring for Aircraft Applications. Sensors 2019, 19, 545. [Google Scholar] [CrossRef] [PubMed]
- Carrino, S.; Nicassio, F.; Scarselli, G. Nonlinearities Associated with Impaired Sensors in a Typical SHM Experimental Set-Up. Electronics 2018, 7, 303. [Google Scholar] [CrossRef] [Green Version]
- Abbas, M.; Shafiee, M. Determination of Surface Defects in Large Metallic Structures using Ultrasonic Guided Waves. Sensors 2018, 18, 3958. [Google Scholar] [CrossRef] [Green Version]
- Xu, C.; Yang, Z.; Qiao, B.; Chen, X. Traveling distance estimation for dispersive Lamb waves through sparse Bayesian learning strategy. Smart Mater. Struct. 2019, 28, 85008. [Google Scholar] [CrossRef]
- Nyikayaramba, G.; Murmann, B. S-Parameter-Based Defect Localization for Ultrasonic Guided Wave SHM. Aerospace 2020, 7, 33. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Zeng, L.; Lin, J.; Luo, Z. An improved time reversal method for diagnostics of composite plates using Lamb waves. Composite Struct. 2018, 190, 10–19. [Google Scholar] [CrossRef]
- Xu, C.; Yang, Z.; Tian, S.; Chen, X. Lamb wave inspection for composite laminates using a combined method of sparse reconstruction and delay-and-sum. Composit. Struct. 2019, 223, 110973. [Google Scholar] [CrossRef]
- Xu, X.; Ji, H.; Qiu, J.; Cheng, J.; Wu, Y.; Takagi, T. Interlaminar contact resistivity and its influence on eddy currents in carbon fiber reinforced polymer laminates. NDT E Int. 2017, 94, 79–91. [Google Scholar] [CrossRef]
- Zhu, Q.; Qiu, J.; Zhang, C.; Hong, L. Application of laser ultrasonic detection method for double-layerlaminated material. Laser Optoelectron. Progress. 2016, 53, 126–133. [Google Scholar]
- Gao, D.; Wu, Z.; Yang, L.; Zheng, Y. Guide waves-based multi-damage identification using a local probability-based diagnostic imaging method. Smart Mater. Struct. 2016, 25, 045009. [Google Scholar] [CrossRef]
- Zhang, H.; Lin, J.; Hua, J.; Tong, T. Interpretable convolutional sparse coding method of Lamb waves for damage identification and localization. Struct. Health Monit. 2022, 21, 1790–1804. [Google Scholar] [CrossRef]
- Liu, G.; Xiao, Y.; Zhang, H.; Ren, G. Probability-based diagnostic imaging for damage identification of stiffened composite panel. Acta Mater. Compos. Sinica 2018, 35, 311–319. [Google Scholar]
- Hammed, M.; Li, Z.; Chen, J.; Qi, J. Lamb-Wave-Based Multistage Damage Detection Method Using an Active PZT Sensor Network for Large Structures. Sensors 2019, 19, 2010. [Google Scholar] [CrossRef] [Green Version]
- Memmolo, V.; Boffa, N.; Maio, L.; Monaco, E.; Ricci, F. Damage Localization in Composite Structures Using a Guided Waves Based Multi-Parameter Approach. Aerospace 2019, 5, 111. [Google Scholar] [CrossRef] [Green Version]
- Wan, T.; Chang, J.; Zeng, X.; Li, Y. Damage identification and scanning imaging of glass fiber reinforced polymer composite plates based on empirical mode decomposition and correlation coefficient. Acta Mater. Compos. Sinica 2020, 37, 1921–1931. [Google Scholar]
- Thalapil, J.; Sawant, S.; Tallur, S.; Banerjee, S. Guided wave based localization and severity assessment of in-plane and out-of-plane fiber waviness in carbon fiber reinforced composites. Compos. Struct. 2022, 297, 115932. [Google Scholar] [CrossRef]
- Han, J.; Ou, W.; Xiong, J.; Feng, S. Remote Heart Rate Estimation by Pulse Signal Reconstruction Based on Structural Sparse Representation. Electronics 2022, 11, 3738. [Google Scholar] [CrossRef]
- Davis, G.; Mallat, S.; Avellaneda, M. Adaptive greedy approximations. Construct. Approxim. 1997, 13, 57–98. [Google Scholar] [CrossRef]
- Candes, E.; Tao, T. Decoding by linear programming. IEEE Trans. Inf. Theory 2005, 51, 4203–4215. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Jia, X.; Hu, Q.; Xu, D.; Guo, C.; Wang, Q.; Wang, S. Laplace Prior-Based Bayesian Compressive Sensing Using K-SVD for Vibration Signal Transmission and Fault Detection. Electronics 2019, 8, 517. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Rao, T. Sparse Signal Recovery with Temporally Correlated Source Vectors Using Sparse Bayesian Learning. IEEE J. Select. Top. Sig. Process. 2011, 5, 912–926. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Chen, Q.; Wang, L.; Liu, H. DME pulse interference suppression method based on BSBL-BO algorithm. J. Syst. Eng. Electron. 2021, 43, 2649–2656. [Google Scholar]
- Liu, B.; Zhang, Z.; Xu, G.; Fan, H.; Fu, Q. Energy Efficient Telemonitoring of Physiological Signals via Compressed Sensing: A Fast Algorithm and Power Consumption Evaluation. Biomed. Signal Proc. Control. 2014, 11, 80–88. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Gao, H.; Zhang, G.; Ayhan, B.; Yan, F.; Kwan, C.; Rose, L. Active health monitoring of an aircraft wing with embedded piezoelectric sensor/actuator network: I. Defect detection, localization and growth monitoring. Smart Mater. Struct. 2007, 16, 1028. [Google Scholar] [CrossRef]
- Wilson, C.; Chang, F. Monitoring fatigue-induced transverse matrix cracks in laminated composites using built-in acousto-ultrasonic techniques. Struct. Health Monit. 2016, 15, 335–350. [Google Scholar] [CrossRef]
- Liu, X.; Ai, F.; Bo, L.; Pu, K.; Luo, H.; Wei, D. Detection and Quantization of Fatigue Damage in Laminated Composites with Cross Recursive Quantitative Analysis. IEEE Transact. Ind. Inf. 2021, 17, 1553–1561. [Google Scholar] [CrossRef]
- Liu, Z.; Fan, J.; He, C.; Wu, B. Scanning imaging of composite plate using air-coupled Lamb waves based on probabilistic damage algorithm. Acta Mater. Composit. Sinica 2015, 32, 227–235. [Google Scholar]
- Fu, J.; Wang, X.; Li, Z.; Tan, Q.; Wang, J. Seismic P-wave arrival time automatic extraction method based on signal-to-noise ratio in strong noise environment. J. Geophys. 2019, 4, 1405–1414. [Google Scholar]
- Su, C.; Jiang, S.; Liang, J.; Tain, A.; Sun, L.; Zhang, F.; Zhang, L.; Sui, Q. Lamb wave tomography damage imaging of carbon fiber reinforced olymer composite structures in strong noise environment. Acta Mater. Compos. Sinica 2020, 37, 886–895. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cycles | Indicators | Energy | Cross-Correlation | Sparse Representation |
|---|---|---|---|---|
| 20,000 | Real area (cm2) | 8.84 | 8.84 | 8.84 |
| Imaging area (cm2) | 55.00 | 57.72 | 32.01 | |
| Imaging error | 5.22 | 5.53 | 2.62 | |
| Error percentage | 49.81% | 52.60% | ||
| 80,000 | Real area (cm2) | 16.56 | 16.56 | 16.56 |
| Imaging area (cm2) | 59.22 | 55.25 | 33.44 | |
| Imaging error | 2.58 | 3.34 | 1.02 | |
| Error percentage | 60.44% | 67.33% | ||
| 90,000 | Real area (cm2) | 18.63 | 18.63 | 18.63 |
| Imaging area (cm2) | 53.83 | 52.72 | 37.80 | |
| Imaging error | 1.89 | 1.83 | 1.03 | |
| Error percentage | 45.53% | 43.77% |
| SNR | Indicators | Energy | Cross-Correlation | Sparse Representation |
|---|---|---|---|---|
| 6 dB | Real area (cm2) | 18.63 | 18.63 | 18.63 |
| Imaging area (cm2) | 53.94 | 56.83 | 33.24 | |
| Imaging error | 1.90 | 2.05 | 0.78 | |
| Error percentage | 58.63 | 61.76 | ||
| 3 dB | Real area (cm2) | 18.63 | 18.63 | 18.63 |
| Imaging area (cm2) | 53.48 | 59.93 | 43.68 | |
| Imaging error | 1.87 | 2.22 | 1.35 | |
| Error percentage | 28.11 | 39.33 | ||
| 0.1 dB | Real area (cm2) | 18.63 | 18.63 | 18.63 |
| Imaging area (cm2) | 54.42 | 63.80 | 51.40 | |
| Imaging error | 1.92 | 2.42 | 1.76 | |
| Error percentage | 8.43 | 27.40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, Q.; Ye, B.; Zou, Y.; Hua, R.; Feng, J.; Shi, X. Probability-Based Diagnostic Imaging of Fatigue Damage in Carbon Fiber Composites Using Sparse Representation of Lamb Waves. Electronics 2023, 12, 1148. https://doi.org/10.3390/electronics12051148
Duan Q, Ye B, Zou Y, Hua R, Feng J, Shi X. Probability-Based Diagnostic Imaging of Fatigue Damage in Carbon Fiber Composites Using Sparse Representation of Lamb Waves. Electronics. 2023; 12(5):1148. https://doi.org/10.3390/electronics12051148
Chicago/Turabian StyleDuan, Qiming, Bo Ye, Yangkun Zou, Rong Hua, Jiqi Feng, and Xiaoxiao Shi. 2023. "Probability-Based Diagnostic Imaging of Fatigue Damage in Carbon Fiber Composites Using Sparse Representation of Lamb Waves" Electronics 12, no. 5: 1148. https://doi.org/10.3390/electronics12051148