
Ground-Based MIMO-SAR Fast Imaging Algorithm Based on Geometric Transformation
 , , and
, , and
Abstract
:1. Introduction
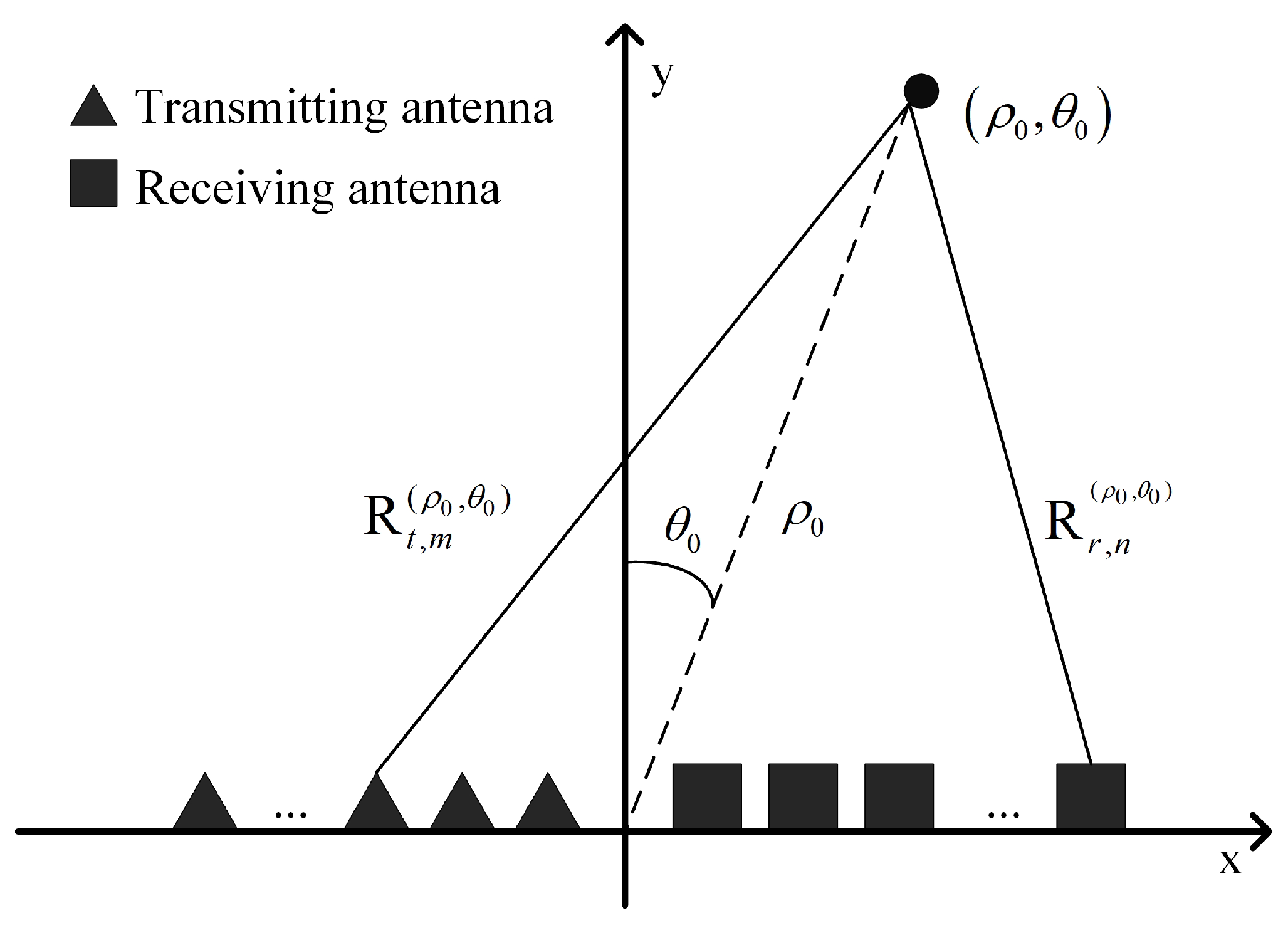
2. MIMO-SAR System and Signal Model
3. Phase Center Approximation Error Analysis and Compensation for MIMO-SAR
3.1. Phase Center Approximation Error in Linear Array
3.2. Analysis of Non-Collinear Array
4. MIMO-SAR Fast Imaging Algorithm
4.1. The Principle of Subimage Coherent Synthesis Fast Imaging Algorithm Based on Interpolation
4.2. A Subimage Coherent Synthesis Algorithm Based on Geometric Transformation
- After phase center approximation (PCA) error compensation, the data are rearranged in the order of virtual array elements;
- Then, the rearranged data of each subaperture are extracted and windowed, and the coarse resolution imaging results in the subaperture coordinate system can be obtained;
- The subimages are converted into the full aperture coordinate system by distance translation and angle rotation;
- Finally, the transformed subimages are phase compensated and coherently synthesized to obtain the full resolution imaging result of the scene.
4.3. The Computational Cost Analysis of the Algorithm
- For a single pixel, the azimuth coordinate mapping is calculated, and then the interpolation calculation is applied. It is assumed that the FFT interpolation algorithm is used. The processing of a pixel requires six multiplications, four additions and one square root. A total of pixels need to be processed;
- For a single pixel, the range coordinate mapping is calculated, and then the interpolation calculation is applied. The processing of a pixel requires eight multiplications, six additions and one square root. A total of pixels need to be processed;
- For a single pixel, the compensation phase is calculated. The processing of a pixel requires two multiplications. A total of pixels need to be processed;
- Finally, the phase compensation and coherent synthesis of subimages require multiplications and additions.
- For a single pixel, the range offset is calculated according to Equation (18). Range translation is realized by linear phase multiplication. The processing of a pixel requires two multiplications. A total of pixels need to be processed;
- For a single pixel, the angle offset is calculated according to Equation (20). Angle rotation is realized by linear phase multiplication. The processing of a pixel requires two multiplications. A total of pixels need to be processed;
- For a single pixel, the compensation phase is calculated according to Equation (21). The processing of a pixel requires two multiplications. A total of pixels need to be processed;
- Finally, the phase compensation and coherent synthesis of subimages require multiplications and additions.
5. Simulation and Experiment
5.1. Simulation
5.2. Experiment
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Hong, W.; Zhang, Y.; Lin, Y.; Li, Y.; Bai, Z.; Zhang, Q.; Lv, S.; Liu, H.; Song, Y. Ground-Based Differential Interferometry SAR: A Review. IEEE Geosci. Remote Sens. Mag. 2020, 8, 43–70. [Google Scholar] [CrossRef]
- Pieraccini, M.; Miccinesi, L. Ground-Based Radar Interferometry: A Bibliographic Review. Remote Sens. 2019, 11, 1029. [Google Scholar] [CrossRef] [Green Version]
- Caduff, R.; Schlunegger, F.; Kos, A.; Wiesmann, A. A review of terrestrial radar interferometry for measuring surface change in the geosciences. Earth Surf. Process. Landforms 2015, 40, 208–228. [Google Scholar] [CrossRef]
- Zhou, Z.; Cheng, X.; Zhou, W.; Hao, W.; Xiao, H.; Chen, H.; Yang, K. Application of GB-SAR in landslide deformation monitoring. Bull. Surv. Mapp. 2022, 7, 60–63. Available online: http://tb.chinasmp.com/EN/10.13474/j.cnki.11-2246.2022.0204 (accessed on 16 January 2023).
- Tarchi, D.; Rudolf, H.; Luzi, G.; Chiarantini, L.; Sieber, A.J. SAR interferometry for structural change detection: A demonstration test on a dam. In Proceedings of the International Geoscience and Remote Sensing Symposium, IGARSS ’99 Proceedings, Hamburg, Germany, 28 June–2 July 1999; Volume 3, pp. 1522–1524. [Google Scholar]
- Martinez-Vazquez, A.; Fortuny-Guasch, J. A GB-SAR Processor for Snow Avalanche Identification. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3948–3956. [Google Scholar] [CrossRef]
- Nico, G.; Leva, D.; Antonello, G.; Tarchi, D. Ground-based SAR interferometry for terrain mapping: Theory and sensitivity analysis. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1344–1350. [Google Scholar] [CrossRef]
- Luo, Y.; Song, H.; Wang, R.; Deng, Y.; Zhao, F.; Xu, Z. Arc FMCW SAR and Applications in Ground Monitoring. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5989–5998. [Google Scholar] [CrossRef]
- Roedelsperger, S.; Becker, M.; Gerstenecker, C.; Laeufer, G.; Schilling, K.; Steineck, D. Digital elevation model with the ground-based SAR IBIS-L as basis for volcanic deformation monitoring. J. Geodyn. 2010, 49, 241–246. [Google Scholar] [CrossRef] [Green Version]
- Fishler, E.; Haimovich, A.; Blum, R.; Chizhik, D.; Cimini, L.; Valenzuela, R. MIMO radar: An idea whose time has come. In Proceedings of the IEEE Radar Conference, Philadelphia, PA, USA, 26–29 April 2004; pp. 71–78. [Google Scholar] [CrossRef] [Green Version]
- Zeng, T.; Deng, Y.; Hu, C.; Tian, W. Development and application examples of ground-based differential interferometric radar. J. Radars 2019, 8, 154–170. [Google Scholar] [CrossRef]
- Tarchi, D.; Oliveri, F.; Sammartino, P.F. MIMO Radar and Ground-Based SAR Imaging Systems: Equivalent Approaches for Remote Sensing. IEEE Trans. Geosci. Remote Sens. 2013, 51, 425–435. [Google Scholar] [CrossRef]
- You, Y. Design and Implementation of C-Band Ground-Based MIMO Deformation Monitoring Radar. Ph.D. Thesis, Chongqing University, Chongqing, China, 2021. [Google Scholar]
- Gao, L.; Zeng, Y.; Zheng, G. Current status and development trend of MIMO radar imaging. Aerosp. Electron. Warf. 2013, 29, 4. [Google Scholar]
- Pang, B.; Xing, S.; Dai, D.; Li, Y.; Wang, X. Development and perspective of MIMO-SAR imaging technology. Syst. Eng. Electron. 2020, 42, 13. [Google Scholar]
- Han, X.; Hu, W.; Yu, W.; Du, X. Distributed multi-channel radar imaging technology. J. Electron. Inf. Technol. 2007, 29, 2357–2358. [Google Scholar]
- Wang, H.; Su, Y.; Zhu, Y.; Xu, H. Research on MIMO radar imaging based on spatial spectral domain filling. Acta Electron. Sin. 2009, 37, 1242–1246. [Google Scholar]
- Zhuge, X.; Yarovoy, A.G.; Savelyev, T.; Ligthart, L. Modified Kirchhoff Migration for UWB MIMO Array-Based Radar Imaging. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2692–2703. [Google Scholar] [CrossRef]
- Guccione, P.; Zonno, M.; Mascolo, L.; Nico, G. Focusing algorithms analysis for Ground-Based SAR images. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 3895–3898. [Google Scholar] [CrossRef]
- Monti Guarnieri, A.; Scirpoli, S. Efficient Wavenumber Domain Focusing for Ground-Based SAR. IEEE Geosci. Remote Sens. Lett. 2010, 7, 161–165. [Google Scholar] [CrossRef]
- Wang, H. Research on MIMO Radar Imaging Algorithm. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2010. [Google Scholar]
- Gu, F.; Chi, L.; Zhang, Q.; Zhu, F. Single snapshot imaging method in multiple-input multiple-output radar with sparse antenna array. IET Radar Sonar Navig. 2013, 7, 535–543. [Google Scholar] [CrossRef]
- Jiang, L.; Yang, Z.; Che, L. A Sparse Imaging Algorithm for Time-Division MIMO Landslide Radar. Radar Sci. Technol. 2019, 17, 1–7. [Google Scholar] [CrossRef]
- Marks, D.L.; Yurduseven, O.; Smith, D.R. Fourier Accelerated Multistatic Imaging: A Fast Reconstruction Algorithm for Multiple-Input-Multiple-Output Radar Imaging. IEEE Access 2017, 5, 1796–1809. [Google Scholar] [CrossRef]
- Mei, H.; Tian, W.; Hu, C.; Long, T. Fast Imaging Algorithm Based on Ground-Based MIMO Radar. J. Signal Process. 2019, 35, 9. [Google Scholar] [CrossRef]
- Wang, L.; Xu, J.; HuangFu, K.; Peng, Y. Error bound of MIMO-SAR equivalent phase center based on image quality evaluation. J. Tsinghua Univ. Technol. 2010, 50, 586–590. [Google Scholar]
- Guo, Y. Imaging Processing and Error Compensation of Airborne Multi-Channel SAR System. Ph.D. Thesis, Xidian University, Xi’an, China, 2017. [Google Scholar]
- Zhang, X.; Gu, H.; Su, W. Research on Sparse Array Design for UWB MIMO Near-field Imaging Radar. Fire Control. Radar Technol. 2019, 48, 6. [Google Scholar] [CrossRef]
- Meng, X.; Wu, S.; Tu, H.; Liu, T.; Jin, X. A fast imaging algorithm for sparse array imaging based on PCA and modified SLIM methods. J. Infrared Millim. Waves 2020, 39, 300–305. [Google Scholar] [CrossRef]
- Cheng, H.; Jingyang, W.; Weiming, T.; Tao, Z.; Rui, W. Design and Imaging of Ground-Based Multiple-Input Multiple-Output Synthetic Aperture Radar (MIMO SAR) with Non-Collinear Arrays. Sensors 2017, 17, 598. [Google Scholar]
- Monserrat, O.; Crosetto, M.; Luzi, G. A review of ground-based SAR interferometry for deformation measurement. ISPRS J. Photogramm. Remote Sens. 2014, 93, 40–48. [Google Scholar] [CrossRef] [Green Version]
- Mao, C.; Hu, C.; Zeng, T.; Tian, W. Ground-based SAR Fast imaging Algorithm Based on Sub-image Combination. J. Signal Process. 2015, 31, 1396–1403. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Carrier frequency | 20 GHz |
| Bandwidth | 200 MHz |
| Number of transmitting antenna | 16 |
| Number of receiving antenna | 8 |
| Aperture length | 0.4064 m |
| Range | 20 m–2000 m |
| Azimuth angle | – |
| Operational Method | Interpolation Method | The Method Proposed in This Paper |
|---|---|---|
| Multiplication | ||
| addition | ||
| square root | 0 |
| Performance Criteria | Measured Value Based on Interpolation Method | Measured Value of the Method Proposed in This Paper |
|---|---|---|
| Range resolution | 0.75 m | 0.75 m |
| Azimuth resolution | 0.015 | 0.015 |
| Range PSLR | −13.38 dB | −13.38 dB |
| Azimuth PSLR | −13.15 dB | −13.16 dB |
| Performance Criteria | Measured Value Based on Interpolation Method | Measured Value of the Method Proposed in This Paper |
|---|---|---|
| Range resolution | 0.89 m | 0.89 m |
| Azimuth resolution | 0.018 | 0.018 |
| Range PSLR | −24.35 dB | −24.37 dB |
| Azimuth PSLR | −26.81 dB | −26.84 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dan, Q.; Yu, C.; Huang, S.; Lai, T.; Huang, H.; Chen, W.; Weng, D. Ground-Based MIMO-SAR Fast Imaging Algorithm Based on Geometric Transformation. Electronics 2023, 12, 1466. https://doi.org/10.3390/electronics12061466
Dan Q, Yu C, Huang S, Lai T, Huang H, Chen W, Weng D. Ground-Based MIMO-SAR Fast Imaging Algorithm Based on Geometric Transformation. Electronics. 2023; 12(6):1466. https://doi.org/10.3390/electronics12061466
Chicago/Turabian StyleDan, Qihong, Chunrui Yu, Shisheng Huang, Tao Lai, Haifeng Huang, Wu Chen, and Duojie Weng. 2023. "Ground-Based MIMO-SAR Fast Imaging Algorithm Based on Geometric Transformation" Electronics 12, no. 6: 1466. https://doi.org/10.3390/electronics12061466