
Laser Image Enhancement Algorithm Based on Improved EnlightenGAN

Abstract
:1. Introduction
- The algorithm is optimized and improved based on the EnlightenGAN model, and its loss function is redesigned to improve the generalization ability and enhancement effect of the model.
- A deep connection between the global discriminator and the local discriminator is established on the original structure of the EnlightenGAN model, allowing the global loss of the global discriminator to better serve the local optimization of the local discriminator.
- A new self-regularized attention mechanism applicable to laser images is established. The convolution mode of downsampling is improved to fuse the attention features and the original image features using residuals.
2. Proposed Algorithm
2.1. Global–Local Discriminator
2.2. U-Net Generator Guided with Self-regularized Attention
3. Model Improvement
3.1. Limitations and Ideas
3.1.1. The Global Discriminator Is Not Related to the Local Discriminator
3.1.2. The Self-regularized Attention Is Inconsistent with the Laser Images
3.1.3. Refine the Modulus of the Dark Channel
3.2. Strong Connection between Global Discriminators and Local Discriminators
3.3. Down-sampling Convolution Module Fitting
3.4. Self-regularized Attention Mechanism
4. Experiment and Analysis
4.1. Experiment Design
4.1.1. Experimental Data and Parameter Tuning
4.1.2. Experimental Setting
4.2. Experimentally Measured Indicators
4.2.1. NIQE
4.2.2. SSIM
4.2.3. PSNR
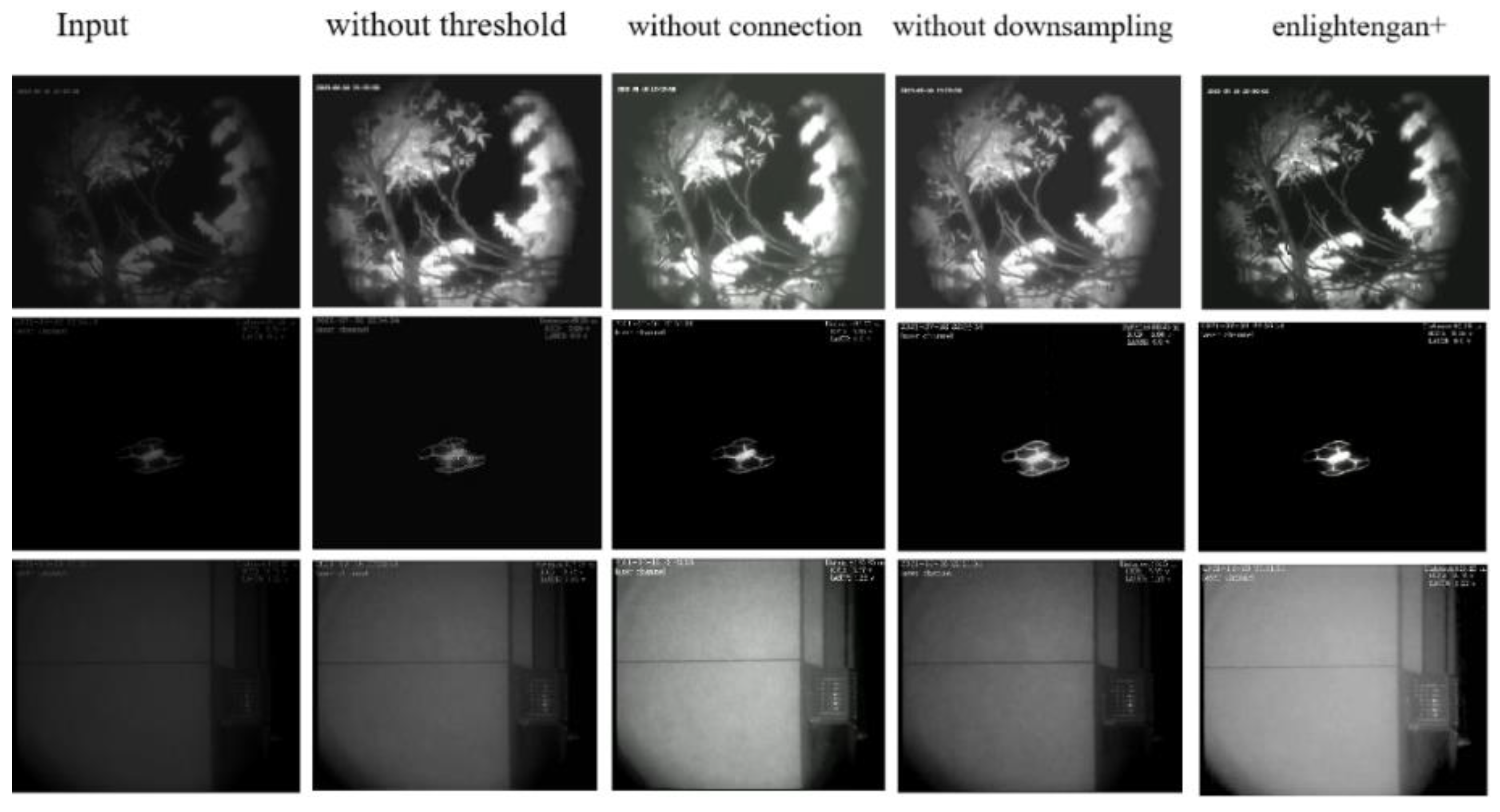
4.3. Ablation Experiment
4.4. Comparison Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Liu, X. Low-resolution laser image enhancement method based on visual communication technology. J. Lasers 2022, 43, 121–125. [Google Scholar]
- Lore, K.; Akintayo, A.; Sarkar, S. LLNet: A deep autoencoder approach to natural low-light image enhancement. Pattern Recognit. 2017, 61, 650–662. [Google Scholar] [CrossRef]
- Li, C.; Guo, J.; Porikli, F.; Pang, Y. LightenNet: A Convolutional Neural Network for weakly illuminated image enhancement. Pattern Recognit. Lett. 2018, 104, 15–22. [Google Scholar] [CrossRef]
- Chen, W.; Wang, W.; Yang, W.; Liu, J. Deep Retinex Decomposition for Low-Light Enhancement. In Proceedings of the British Machine Vision Conference, Newcastle, UK, 3 September 2018. [Google Scholar]
- Liu, H.; Ye, H.; Xu, M.; Zhao, X. A review of generative adversarial network research. Internet Things Technol. 2022, 12, 93–97. [Google Scholar]
- Zhu, J.; Park, T.; Isola, P.; Efros, A. Unpaired Image-to-Image Translation Using Cycle-Consistent Adversarial Networks. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 11–17 October 2017. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention (MICCAI), Munich, Germany, 5–9 October 2015. [Google Scholar]
- Yan, J.; Fang, Y.; Liu, X. A Review of Image Quality Evaluation Research—From the Perspective of Distortion. J. Image Graph. China 2022, 27, 1430–1466. [Google Scholar]
- Yu, W. Research on blurred laser image enhancement based on visual communication technology. J. Lasers 2022, 43, 149–153. [Google Scholar]
- Kou, X. Research on Group Game Technologies Based on Attention Mechanism and Entropy Regularization. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2021. [Google Scholar]
- Li, S. Research of Low-Light Image Enhancement Based on Enlightenment Generative Adversarial Network. Master’s Thesis, Hunan University, Hunan, China, 2020. [Google Scholar]
- Wang, M.; Zhang, H.; Li, J.; Zhang, C. Low-light image enhancement algorithm under mine based on deep neural network. Coal Sci. Technol. 1–13.
- Lin, K.; Geng, J.; Cheng, W.; Li, A. Image dehazing algorithm based on attention mechanism and Markov discriminator. Adv. Lasers Optoelectron. 2022, 59, 112–119. [Google Scholar]
- Nguyen, V.; Cai, J.; Wei, L.; Chu, J. Low-complexity probabilistic piecewise linear fitting of the Sigmoid function. J. Xidian Univ. 2020, 47, 58–65. [Google Scholar]
- Jiang, Y.; Gong, X.; Liu, D.; Cheng, Y.; Fang, C.; Shen, X.; Yang, J.; Zhou, P.; Wang, Z. EnlightenGAN: Deep Light Enhancement Without Paired Supervision. Trans. Img. Proc. 2021, 30, 2340–2349. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Luo, S.; Chen, Y. Research on improved VGG vehicle type recognition based on attention mechanism. Agric. Equip. Veh. Eng. 2022, 60, 82–87. [Google Scholar]
- Shen, Q. Research on Image Super-Resolution Algorithm Based on Generative Adversarial Networks. Master’s Thesis, Nanjing University of Posts and Telecommunications, Nanjing, China, 2022. [Google Scholar]
- Liu, J.; Tian, Y.; Fan, J. An image threshold segmentation method based on accumulated residual information energy. Adv. Lasers Optoelectron. 2023, 1–19. [Google Scholar]
- Bi, Y.; Xu, X. Research on underwater turbulence detection method based on laser distance gating technology. J. Chang. Univ. Sci. Technol. Nat. Sci. Ed. 2018, 41, 1–4. [Google Scholar]
- Shao, X.; Zeng, T.; Wang, Z. A NIQE-based method for quality evaluation of printed images without reference. J. Packag. 2016, 8, 35–39. [Google Scholar]
- Zhu, X.; Yao, S.; Sun, B.; Qian, Y. Image quality evaluation: Fusion of visual characteristics and structural similarity indicators. J. Harbin Inst. Technol. 2018, 50, 121–128. [Google Scholar]
- Xiao, X.; Jing, W.; Zhao, H. Improved image enhancement algorithm based on peak signal-to-noise ratio. J. Chang. Univ. Sci. Technol. Nat. Sci. Ed. 2017, 40, 83–86+92. [Google Scholar]
- Zhang, Y. Image Quality Assessment Based on Human Visual Perception. Ph.D. Thesis, Xidian University, Xi’an, China, June 2017. [Google Scholar]
- Bao, K.; Meng, X.; Shao, F.; Ye, M.; Jin, K.; Peng, Z. MVG without reference quality evaluation of panchromatic/multispectral fusion images. J. Remote Sens. 2022, 26, 568–578. [Google Scholar]
- Zhao, Y. Research on End-to-End Registration Method of UAV Aerial Images Based on Deep Learning. Ph.D. Thesis, North University of China, Shanxi, China, June 2022. [Google Scholar]
- Khorasani, M.; Gibson, I.; Ghasemi, A.H. Laser subtractive and laser powder bed fusion of metals: Review of process and production features. Rapid Prototyp. J. 2023, 29, 935–958. [Google Scholar] [CrossRef]
- Khorasani, M.; Ghasemi, A.; Leary, M. The effect of absorption ratio on meltpool features in laser-based powder bed fusion of IN718. Opt. Laser Technol. 2022, 153, 108263. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware or Software | Technical Parameters |
|---|---|
| operating system | Window 10 × 64 Home |
| GPU | NVIDIA GeForce RTX-3090 |
| CPU | Intel(R) Xeon(R) Silver 4116 |
| memory | 32 GB |
| deep learning libraries | Pytorch |
| programming language | Python |
| NIQE | Without Threshold | Without Connection | Without Down-Sampling | EnlightenGAN+ |
| tree | 13.4 | 14.5 | 13.1 | 12.4 |
| UAV | 23.6 | 25.8 | 24.8 | 22.5 |
| wall | 13.7 | 15.6 | 14.3 | 12.6 |
| PSNR | Without threshold | Without connection | Without down-sampling | EnlightenGAN+ |
| tree | 26.5 | 23.2 | 25.9 | 28.7 |
| UAV | 37.3 | 30.8 | 38.4 | 42.8 |
| wall | 27.1 | 26.3 | 27.3 | 28.9 |
| SSIM | Without threshold | Without connection | Without down-sampling | EnlightenGAN+ |
| tree | 0.43 | 0.24 | 0.36 | 0.44 |
| UAV | 0.84 | 0.57 | 0.80 | 0.95 |
| wall | 0.43 | 0.36 | 0.41 | 0.48 |
| NIQE | CycleGan | LLNET | RetinexNet | EnlightenGAN | EnlightenGAN+ |
| tree | 16.8 | 13.8 | 12.3 | 13.7 | 12.6 |
| UAV | 25.1 | 24.1 | 23.1 | 24.4 | 22.7 |
| wall | 13.5 | 13.9 | 14.2 | 13.5 | 12.4 |
| PSNR | CycleGan | LLNET | RetinexNet | EnlightenGAN | EnlightenGAN+ |
| tree | 27.1 | 26.2 | 26.9 | 27.4 | 27.7 |
| UAV | 28.3 | 31.8 | 39.4 | 41.8 | 42.5 |
| wall | 28.1 | 28.1 | 27.8 | 28.9 | 28.6 |
| SSIM | CycleGan | LLNET | RetinexNet | EnlightenGAN | EnlightenGAN+ |
| tree | 0.48 | 0.66 | 0.36 | 0.35 | 0.46 |
| UAV | 0.26 | 0.29 | 0.80 | 0.95 | 0.96 |
| wall | 0.21 | 0.18 | 0.41 | 0.44 | 0.50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Y.; Wang, Y.; Feng, K.; Liu, Y.; Jiang, Y.; Xie, J.; Niu, Y.; Wang, H. Laser Image Enhancement Algorithm Based on Improved EnlightenGAN. Electronics 2023, 12, 2081. https://doi.org/10.3390/electronics12092081
Fan Y, Wang Y, Feng K, Liu Y, Jiang Y, Xie J, Niu Y, Wang H. Laser Image Enhancement Algorithm Based on Improved EnlightenGAN. Electronics. 2023; 12(9):2081. https://doi.org/10.3390/electronics12092081
Chicago/Turabian StyleFan, Youchen, Yitong Wang, Kai Feng, Yuntian Liu, Yawen Jiang, Jiaxuan Xie, Yufei Niu, and Hongyan Wang. 2023. "Laser Image Enhancement Algorithm Based on Improved EnlightenGAN" Electronics 12, no. 9: 2081. https://doi.org/10.3390/electronics12092081
APA StyleFan, Y., Wang, Y., Feng, K., Liu, Y., Jiang, Y., Xie, J., Niu, Y., & Wang, H. (2023). Laser Image Enhancement Algorithm Based on Improved EnlightenGAN. Electronics, 12(9), 2081. https://doi.org/10.3390/electronics12092081