



An Efficient Adaptive Noise Removal Filter on Range Images for LiDAR Point Clouds



Abstract
:1. Introduction
- A comprehensive analysis of the influence of traditional methods on LiDAR point clouds and the introduction of a range image approach has been shown to be effective.
- The proposed AORI filtering method for the range image, which demonstrates high performance in terms of processing time and accuracy.
- An experiment on the WADS dataset under extreme weather conditions and a comparison with other existing methods in terms of accuracy, F1 score and execution time.
2. Related Work
3. The Proposed Filter
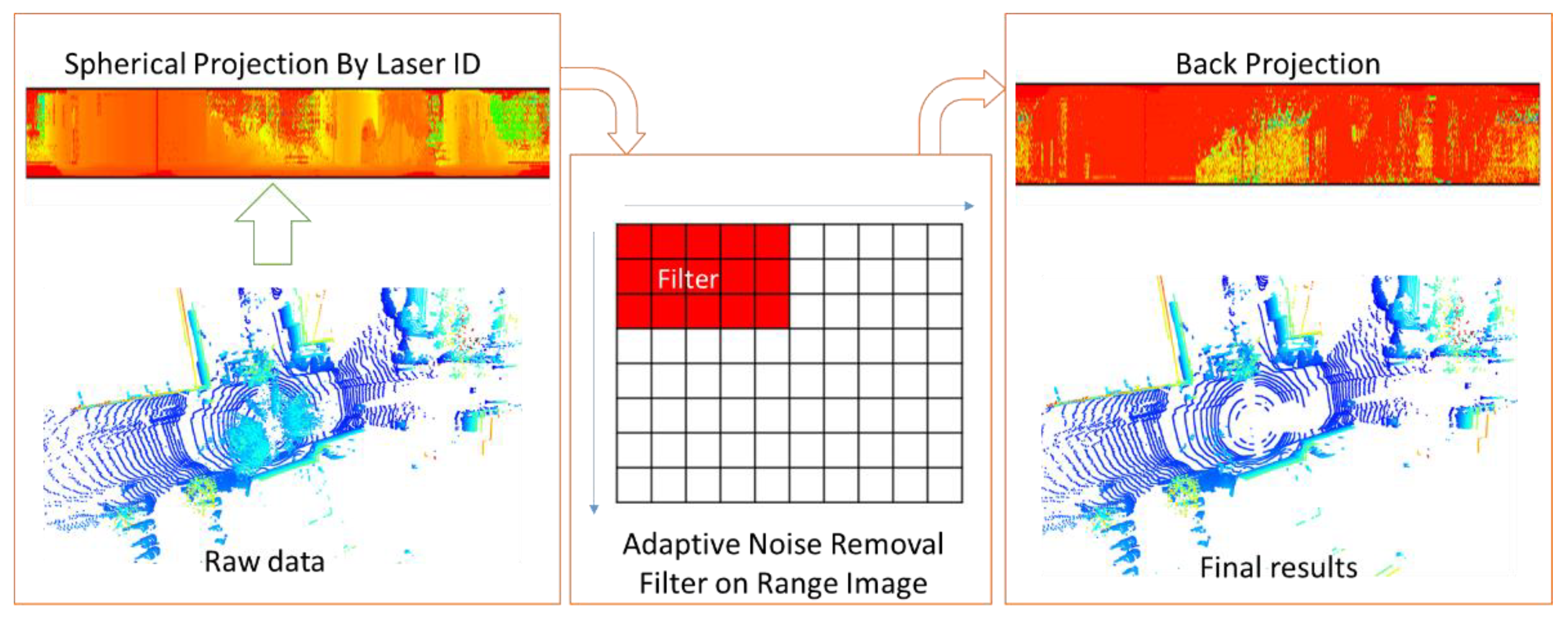
3.1. Generating the Range Image
3.2. Adaptive Noise Removal Filter on Range Image
| Algorithm 1 Pseudocode of our proposed filter |
| Input: % Projection range image by laser ID from Output: Snow Points, Object Points Def filterRangeImage: = paddingRangeImage(R) for do: for do: if : count the number of () if then ← object points (inlier) else ← noise point (outlier) end if end if end for end for. Def paddingRangeImage(R): return . |
4. Experimental Results
4.1. Experimental Dataset
4.2. Experimental Settings
4.3. Evaluation Metrics
4.4. Implementation Results
4.5. Evaluation
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Martínez-Díaz, M.; Soriguera, F. Autonomous Vehicles: Theoretical and Practical Challenges. Transp. Res. Procedia 2018, 33, 275–282. [Google Scholar] [CrossRef]
- Yeong, D.J.; Velasco-hernandez, G.; Barry, J.; Walsh, J. Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review. Sensors 2021, 21, 2140. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.W.; Zheng, B.Y.; Wang, C.; Zhao, C.H.; Hou, X.L.; Pan, Q.; Xu, Z. A Survey on Multi-Sensor Fusion Based Obstacle Detection for Intelligent Ground Vehicles in off-Road Environments. Front. Inf. Technol. Electron. Eng. 2020, 21, 675–692. [Google Scholar] [CrossRef]
- Fayyad, J.; Jaradat, M.A.; Gruyer, D.; Najjaran, H. Deep Learning Sensor Fusion for Autonomous Vehicle Perception and Localization: A Review. Sensors 2020, 20, 4220. [Google Scholar] [CrossRef] [PubMed]
- Xu, D.; Anguelov, D.; Jain, A. PointFusion: Deep Sensor Fusion for 3D Bounding Box Estimation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 244–253. [Google Scholar]
- Shahian Jahromi, B.; Tulabandhula, T.; Cetin, S. Real-Time Hybrid Multi-Sensor Fusion Framework for Perception in Autonomous Vehicles. Sensors 2019, 19, 4357. [Google Scholar] [CrossRef] [PubMed]
- Norbye, H.G. Camera-Lidar Sensor Fusion in Real Time for Autonomous Surface Vehicles. Norwegian University of Science and Technology, Norway. 2019. Available online: https://folk.ntnu.no/edmundfo/msc2019-2020/norbye-lidar-camera-reduced.pdf/ (accessed on 12 March 2023).
- Yang, J.; Liu, S.; Su, H.; Tian, Y. Driving Assistance System Based on Data Fusion of Multisource Sensors for Autonomous Unmanned Ground Vehicles. Comput. Netw. 2021, 192, 108053. [Google Scholar] [CrossRef]
- Kang, D.; Kum, D. Camera and Radar Sensor Fusion for Robust Vehicle Localization via Vehicle Part Localization. IEEE Access 2020, 8, 75223–75236. [Google Scholar] [CrossRef]
- Wei, P.; Cagle, L.; Reza, T.; Ball, J.; Gafford, J. LiDAR and Camera Detection Fusion in a Real-Time Industrial Multi-Sensor Collision Avoidance System. Electronics 2018, 7, 84. [Google Scholar] [CrossRef]
- De Silva, V.; Roche, J.; Kondoz, A. Robust Fusion of LiDAR and Wide-Angle Camera Data for Autonomous Mobile Robots. Sensors 2018, 18, 2730. [Google Scholar] [CrossRef]
- Li, Y.; Ibanez-Guzman, J. Lidar for Autonomous Driving: The Principles, Challenges, and Trends for Automotive Lidar and Perception Systems. IEEE Signal Process. Mag. 2020, 37, 50–61. [Google Scholar] [CrossRef]
- Wolcott, R.W.; Eustice, R.M. Visual Localization within LIDAR Maps for Automated Urban Driving. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 176–183. [Google Scholar]
- Murcia, H.F.; Monroy, M.F.; Mora, L.F. 3D Scene Reconstruction Based on a 2D Moving LiDAR. In Applied Informatics, Proceedings of the First International Conference, ICAI 2018, Bogotá, Colombia, 1–3 November 2018; Communications in Computer and Information Science; Springer: Cham, Switzerland, 2018; Volume 942. [Google Scholar]
- Li, H.; Liping, D.; Huang, X.; Li, D. Laser Intensity Used in Classification of Lidar Point Cloud Data. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Boston, MA, USA, 6–11 July 2008; Volume 2. [Google Scholar]
- Akai, N.; Morales, L.Y.; Yamaguchi, T.; Takeuchi, E.; Yoshihara, Y.; Okuda, H.; Suzuki, T.; Ninomiya, Y. Autonomous Driving Based on Accurate Localization Using Multilayer LiDAR and Dead Reckoning. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar]
- Jang, C.H.; Kim, C.S.; Jo, K.C.; Sunwoo, M. Design Factor Optimization of 3D Flash Lidar Sensor Based on Geometrical Model for Automated Vehicle and Advanced Driver Assistance System Applications. Int. J. Automot. Technol. 2017, 18, 147–156. [Google Scholar] [CrossRef]
- Ahmed, S.; Huda, M.N.; Rajbhandari, S.; Saha, C.; Elshaw, M.; Kanarachos, S. Pedestrian and Cyclist Detection and Intent Estimation for Autonomous Vehicles: A Survey. Appl. Sci. 2019, 9, 2335. [Google Scholar] [CrossRef]
- Wen, L.H.; Jo, K.H. Fast and Accurate 3D Object Detection for Lidar-Camera-Based Autonomous Vehicles Using One Shared Voxel-Based Backbone. IEEE Access 2021, 9, 1. [Google Scholar] [CrossRef]
- Zhen, W.; Hu, Y.; Liu, J.; Scherer, S. A Joint Optimization Approach of LiDAR-Camera Fusion for Accurate Dense 3-D Reconstructions. IEEE Robot. Autom. Lett. 2019, 4, 3585–3592. [Google Scholar] [CrossRef]
- Zhong, H.; Wang, H.; Wu, Z.; Zhang, C.; Zheng, Y.; Tang, T. A Survey of LiDAR and Camera Fusion Enhancement. Procedia Comput. Sci. 2021, 183, 579–588. [Google Scholar] [CrossRef]
- Zhang, F.; Clarke, D.; Knoll, A. Vehicle Detection Based on LiDAR and Camera Fusion. In Proceedings of the 2014 17th IEEE International Conference on Intelligent Transportation Systems, ITSC, Qingdao, China, 8–11 October 2014; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 14 November 2014; pp. 1620–1625. [Google Scholar]
- Kutila, M.; Pyykonen, P.; Holzhuter, H.; Colomb, M.; Duthon, P. Automotive LiDAR Performance Verification in Fog and Rain. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, ITSC, Maui, HI, USA, 4–7 November 2018; Volume 2018-November. [Google Scholar]
- Heinzler, R.; Schindler, P.; Seekircher, J.; Ritter, W.; Stork, W. Weather Influence and Classification with Automotive Lidar Sensors. In Proceedings of the IEEE Intelligent Vehicles Symposium, Paris, France, 9–12 June 2019; Volume 2019-June. [Google Scholar]
- Filgueira, A.; González-Jorge, H.; Lagüela, S.; Díaz-Vilariño, L.; Arias, P. Quantifying the Influence of Rain in LiDAR Performance. Measurement 2017, 95, 143–148. [Google Scholar] [CrossRef]
- Reymann, C.; Lacroix, S. Improving LiDAR Point Cloud Classification Using Intensities and Multiple Echoes. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–3 October 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 11 December 2015; Volume 2015-December, pp. 5122–5128. [Google Scholar]
- Bijelic, M.; Gruber, T.; Ritter, W. A Benchmark for Lidar Sensors in Fog: Is Detection Breaking Down? In Proceedings of the IEEE Intelligent Vehicles Symposium, 26–30 June 2018, Changshu, China; Volume 2018-June.
- Pitropov, M.; Garcia, D.E.; Rebello, J.; Smart, M.; Wang, C.; Czarnecki, K.; Waslander, S. Canadian Adverse Driving Conditions Dataset. Int. J. Robot. Res. 2021, 40, 681–690. [Google Scholar] [CrossRef]
- Charron, N.; Phillips, S.; Waslander, S.L. De-Noising of Lidar Point Clouds Corrupted by Snowfall. In Proceedings of the 2018 15th Conference on Computer and Robot Vision, CRV, Toronto, ON, Canada, 8–10 May 2018. [Google Scholar]
- Jokela, M.; Kutila, M.; Pyykönen, P. Testing and Validation of Automotive Point-Cloud Sensors in Adverse Weather Conditions. Appl. Sci. 2019, 9, 2341. [Google Scholar] [CrossRef]
- Rasshofer, R.H.; Spies, M.; Spies, H. Influences of Weather Phenomena on Automotive Laser Radar Systems. Adv. Radio Sci. 2011, 9, 49–60. [Google Scholar] [CrossRef]
- Duan, Y.; Yang, C.; Li, H. Low-Complexity Adaptive Radius Outlier Removal Filter Based on PCA for Lidar Point Cloud Denoising. Appl. Opt. 2021, 60, E1–E7. [Google Scholar] [CrossRef]
- Shi, C.; Wang, C.; Liu, X.; Sun, S.; Xiao, B.; Li, X.; Li, G. Three-Dimensional Point Cloud Denoising via a Gravitational Feature Function. Appl. Opt. 2022, 61, 1331–1343. [Google Scholar] [CrossRef]
- Shan, Y.-H.; Zhang, X.; Niu, X.; Yang, G.; Zhang, J.-K. Denoising Algorithm of Airborne LIDAR Point Cloud Based on 3D Grid. Int. J. Signal Process. Image Process. Pattern Recognit. 2017, 10, 85–92. [Google Scholar] [CrossRef]
- Chang, X.; Ren, P.; Xu, P.; Li, Z.; Chen, X.; Hauptmann, A. A Comprehensive Survey of Scene Graphs: Generation and Application. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 1–26. [Google Scholar] [CrossRef] [PubMed]
- Matsui, T.; Ikehara, M. GAN-Based Rain Noise Removal from Single-Image Considering Rain Composite Models. IEEE Access 2020, 8, 40892–40900. [Google Scholar] [CrossRef]
- Bernard, A.; Comby, P.O.; Lemogne, B.; Haioun, K.; Ricolfi, F.; Chevallier, O.; Loffroy, R. Deep Learning Reconstruction versus Iterative Reconstruction for Cardiac CT Angiography in a Stroke Imaging Protocol: Reduced Radiation Dose and Improved Image Quality. Quant. Imaging Med. Surg. 2021, 11, 392–401. [Google Scholar] [CrossRef] [PubMed]
- Zandbergen, P.A. Positional Accuracy of Spatial Data: Non-Normal Distributions and a Critique of the National Standard for Spatial Data Accuracy. Trans. GIS 2008, 12, 103–130. [Google Scholar] [CrossRef]
- Gharineiat, Z.; Tarsha Kurdi, F.; Campbell, G. Review of Automatic Processing of Topography and Surface Feature Identification LiDAR Data Using Machine Learning Techniques. Remote Sens. 2022, 14, 4685. [Google Scholar] [CrossRef]
- Nitin More, V.; Vyas, V. Removal of Fog from Hazy Images and Their Restoration. J. King Saud Univ. Eng. Sci. 2022. [Google Scholar] [CrossRef]
- Matlin, E.; Milanfar, P. Removal of Haze and Noise from a Single Image. In Proceedings of the Computational Imaging X, Burlingame, CA, USA, 23–24 January 2012; Volume 8296. [Google Scholar]
- Xu, J.; Zhao, W.; Liu, P.; Tang, X. An Improved Guidance Image Based Method to Remove Rain and Snow in a Single Image. Comput. Inf. Sci. 2012, 5, 49. [Google Scholar] [CrossRef]
- Heinzler, R.; Piewak, F.; Schindler, P.; Stork, W. CNN-Based Lidar Point Cloud De-Noising in Adverse Weather. IEEE Robot. Autom. Lett. 2020, 5, 2514–2521. [Google Scholar] [CrossRef]
- Seppänen, A.; Ojala, R.; Tammi, K. 4DenoiseNet: Adverse Weather Denoising from Adjacent Point Clouds. IEEE Robotics and Automation Letters. 2022, 8, 456–463. [Google Scholar] [CrossRef]
- Park, J.-I.; Park, J.; Kim, K.S. Fast and Accurate Desnowing Algorithm for LiDAR Point Clouds. IEEE Access 2020, 8, 160202–160212. [Google Scholar] [CrossRef]
- Wang, W.; You, X.; Chen, L.; Tian, J.; Tang, F.; Zhang, L. A Scalable and Accurate De-Snowing Algorithm for LiDAR Point Clouds in Winter. Remote Sens. 2022, 14, 1468. [Google Scholar] [CrossRef]
- Roriz, R.; Campos, A.; Pinto, S.; Gomes, T. DIOR: A Hardware-Assisted Weather Denoising Solution for LiDAR Point Clouds. IEEE Sens. J. 2022, 22, 1621–1628. [Google Scholar] [CrossRef]
- Yang, M.; Liu, J.; Li, Z.; Tan, S. Pre-Processing for Single Image Dehazing. Signal Process. Image Commun. 2020, 83, 115777. [Google Scholar] [CrossRef]
- Fazlali, H.; Shirani, S.; Bradford, M.; Kirubarajan, T. Single Image Rain/Snow Removal Using Distortion Type Information. Multimed. Tools Appl. 2022, 81, 14105–14131. [Google Scholar] [CrossRef]
- Ding, X.; Chen, L.; Zheng, X.; Huang, Y.; Zeng, D. Single Image Rain and Snow Removal via Guided L0 Smoothing Filter. Multimed. Tools Appl. 2016, 75, 2697–2712. [Google Scholar] [CrossRef]
- Zhu, X.; Zhou, H.; Wang, T.; Hong, F.; Ma, Y.; Li, W.; Li, H.; Lin, D. Cylindrical and Asymmetrical 3D Convolution Networks for LiDAR Segmentation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021. [Google Scholar]
- Cortinhal, T.; Tzelepis, G.; Erdal Aksoy, E. SalsaNext: Fast, Uncertainty-Aware Semantic Segmentation of LiDAR Point Clouds. arXiv 2020, arXiv:2003.03653. [Google Scholar]
- Kurup, A.; Bos, J. DSOR: A Scalable Statistical Filter for Removing Falling Snow from LiDAR Point Clouds in Severe Winter Weather. arXiv 2021, arXiv:2109.07078. [Google Scholar]
- Aldoma, A.; Marton, Z.C.; Tombari, F.; Wohlkinger, W.; Potthast, C.; Zeisl, B.; Rusu, R.B.; Gedikli, S.; Vincze, M. Tutorial: Point Cloud Library: Three-Dimensional Object Recognition and 6 DOF Pose Estimation. IEEE Robot. Autom. Mag. 2012, 19, 80–91. [Google Scholar] [CrossRef]
- Rusu, R.B.; Cousins, S. 3D Is Here: Point Cloud Library (PCL). In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Zhang, L.; Chang, X.; Liu, J.; Luo, M.; Li, Z.; Yao, L.; Hauptmann, A. TN-ZSTAD: Transferable Network for Zero-Shot Temporal Activity Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 3848–3861. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Huang, P.-Y.; Chang, X.; Hu, J.; Yang, Y.; Hauptmann, A. Video Pivoting Unsupervised Multi-Modal Machine Translation. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 3918–3932. [Google Scholar] [CrossRef] [PubMed]
- Le, M.-H.; Cheng, C.-H.; Liu, D.-G.; Nguyen, T.-T. An Adaptive Group of Density Outlier Removal Filter: Snow Particle Removal from LiDAR Data. Electronics 2022, 11, 2993. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Parameters | Value |
|---|---|---|
| ROR | NoN | 5 |
| Search radius | 0.1 m | |
| SOR | NoN | 5 |
| Standard deviation | 0.1 | |
| DROR | Search radius | 5 |
| Radius multiplier | 3 | |
| Azimuth angle | 0.1° | |
| DSOR | NoN | 5 |
| Multiplicative | 0.05 | |
| Global threshold constant | 0.1 | |
| LIOR | Search radius | 0.1 m |
| NoN | 5 | |
| Snow detection range | 71.235 m | |
| Intensity threshold | 9 | |
| DDIOR | NoN | 5 |
| AGDOR | NoN | 5 |
| Multiplier factor | 0.001 | |
| Intensity threshold | 9 |
| Methods | Acc (%) | Pre (%) | Re (%) | F1 (%) | Execution Time (s) |
|---|---|---|---|---|---|
| SOR | 79.57 | 32.73 | 21.96 | 26.98 | 0.21 |
| ROR | 62.5 | 67.79 | 18.19 | 28.68 | 0.25 |
| LIOR [45] | 90.35 | 66.17 | 55.56 | 60.4 | 0.07 |
| DROR [29] | 96.17 | 71.91 | 91.89 | 80.68 | 10.99 |
| DSOR [53] | 95.77 | 65.07 | 95.6 | 77.43 | 0.2 |
| DDIOR [46] | 96.26 | 69.87 | 95.23 | 80.6 | 1.3 |
| AGDOR [58] | 96.15 | 96.19 | 80.59 | 83.3 | 0.51 |
| Our filter | 96.96 | 87.9 | 89.92 | 89.9 | 0.26 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le, M.-H.; Cheng, C.-H.; Liu, D.-G. An Efficient Adaptive Noise Removal Filter on Range Images for LiDAR Point Clouds. Electronics 2023, 12, 2150. https://doi.org/10.3390/electronics12092150
Le M-H, Cheng C-H, Liu D-G. An Efficient Adaptive Noise Removal Filter on Range Images for LiDAR Point Clouds. Electronics. 2023; 12(9):2150. https://doi.org/10.3390/electronics12092150
Chicago/Turabian StyleLe, Minh-Hai, Ching-Hwa Cheng, and Don-Gey Liu. 2023. "An Efficient Adaptive Noise Removal Filter on Range Images for LiDAR Point Clouds" Electronics 12, no. 9: 2150. https://doi.org/10.3390/electronics12092150
APA StyleLe, M.-H., Cheng, C.-H., & Liu, D.-G. (2023). An Efficient Adaptive Noise Removal Filter on Range Images for LiDAR Point Clouds. Electronics, 12(9), 2150. https://doi.org/10.3390/electronics12092150