
A State-Feedback Control Strategy Based on Grey Fast Finite-Time Sliding Mode Control for an H-Bridge Inverter with LC Filter Output


Abstract
:1. Introduction
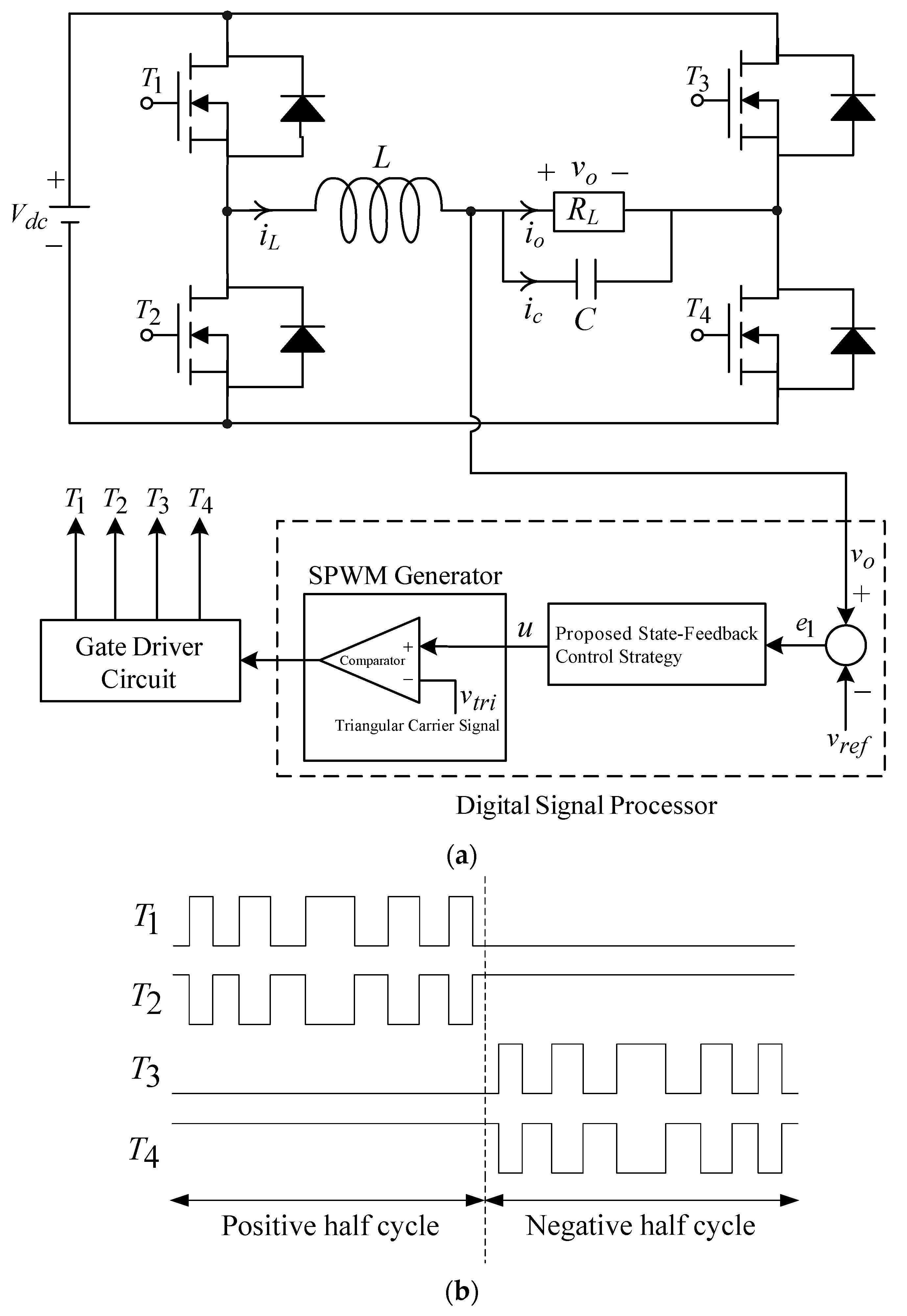
2. Modeling Description of H-Bridge Inverter with LC Filter Output
3. Control Design
- Step 1: The assumption is that the initial series of data (output voltage level) is represented as follows:where represents the amount of data. Generally, a sequence showing changes in output voltage information can be constructed using fewer (at least four) past data points.
- Step 2: There may be either positivity or negativity in the series of data, where mapped generating operation (MGO) takes place to put the primary series of data to non-negativity series :where both and are greater than zero.
- Step 3: The equation for accumulated generating operation (AGO) can be formulated as follows:where , .
- Step 4: Taking the power of for in (12) to attenuate the sequential random uncertainty yields the following:
- Step 5: The differential equation is established via (8) to be as follows:where as well as represent factors in the model that need to be addressed.
- Step 6: The acquired in the former step is converted to through inverse accumulated generating operation (IAGO), leading to the predicted value in the following:
4. Simulated and Experimental Results
5. Discussion and Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sundaramoorthy, S.; Sundaram, S.S.M.; Sakthivel, S.S. Cascaded H-Bridge Inverter Control for Grid Connected DC Power Source: Design and Analysis of Cascaded H-Bridge Multilevel Inverter with PWM Techniques and Controllers; LAP LAMBERT Academic Publishing: London, UK, 2019. [Google Scholar]
- Aboadla, E.H.; Khan, S.; Abdul Kadir, K.; Md Yusof, Z.; Habaebi, M.H.; Habib, S.; Islam, M.; Hasan, M.K.; Hossain, E. Suppressing Voltage Spikes of MOSFET in H-Bridge Inverter Circuit. Electronics 2021, 10, 390. [Google Scholar] [CrossRef]
- Zammit, D.; Staines, C.S.; Apap, M. Compensation techniques for non-linearities in H-bridge inverters. J. Electr. Syst. Inf. Technol. 2016, 3, 361–376. [Google Scholar] [CrossRef]
- Smith, G. Introduction to Modern Power Electronics; Larsen and Keller Education: New York, NY, USA, 2017. [Google Scholar]
- Rozanov, Y.; Ryvkin, S.E.; Chaplygin, E.; Voronin, P. Power Electronics Basics Operating Principles, Design, Formulas, and Applications; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Kumar, V.; Behera, R.K.; Joshi, D.; Bansal, R. Power Electronics, Drives, and Advanced Applications; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Mohan, A.; Jos, B.M.; Sreekumar, S.; Hima, T. Implementation of Constant Switching Frequency Hysteresis based Current Control of Solar PV Inverter. In Proceedings of the 2023 8th International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 1–3 June 2023; pp. 40–44. [Google Scholar]
- Gulbudak, O.; Gokdag, M. FPGA-Based Hysteresis Current Control for Induction Motor fed by a Voltage-Source Inverter. In Proceedings of the 2023 5th Global Power, Energy and Communication Conference (GPECOM), Nevsehir, Turkiye, 14–16 June 2023; pp. 147–152. [Google Scholar]
- Yang, Y.; Yang, Y.; He, L.Q.; Fan, M.D.; Xiao, Y.; Chen, R.; Xie, M.X.; Zhang, X.A.; Zhang, L.J.; Rodriguez, J. A Novel Cascaded Repetitive Controller of an LC-Filtered H6 Voltage-Source Inverter. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 556–566. [Google Scholar] [CrossRef]
- Ye, Y.; Zhang, B.; Zhou, K.; Wang, D.; Wang, Y. High-Performance Cascade-Type Repetitive Controller for CVCF PWM Inverter: Analysis and Design. IET Electr. Power Appl. 2007, 1, 112–118. [Google Scholar] [CrossRef]
- Chen, T.F.; Dutta, O.; Ramasubramanian, D.; Farantatos, E. An LQR-based Robust Voltage Controller for Grid Forming Inverters during Blackstart. In Proceedings of the 2021 IEEE PES Innovative Smart Grid Technologies–Asia (ISGT Asia), Brisbane, Australia, 5–8 December 2021; pp. 1–5. [Google Scholar]
- Zhou, H.; Liu, J.; Zhang, P.; Ma, M.; Fang, Z.; Zeng, J. Linear Quadratic Regulator Optimized Feedback Control Method for Resonant Inverter Power Supply in High Frequency AC Power Distribution of Electric Vehicle. In Proceedings of the 2022 Tsinghua–IET Electrical Engineering Academic Forum, Beijing, China and Online, 28–29 May 2022; pp. 1–7. [Google Scholar]
- Blachuta, M.; Rymarski, Z.; Bieda, R.; Bernacki, K.; Grygiel, R. Design, Modeling and Simulation of PID Control for DC/AC Inverters. In Proceedings of the 2019 24th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 26–29 August 2019; pp. 428–433. [Google Scholar]
- Ucchas, M.T.W.; Nuhas, M.M.; Toufiquzzaman, M.; Mahmud, A.J.; Islam, M.F. Performance and Comparative Analysis of PI and PID Controller-based Single Phase PWM Inverter Using MATLAB Simulink for Variable Voltage. In Proceedings of the 2022 Second International Conference on Advances in Electrical, Computing, Communication and Sustainable Technologies (ICAECT), Bhilai, India, 21–22 April 2022; pp. 1–6. [Google Scholar]
- Kumar, M.; Sen, S.; Kumar, S. A Robust Performance Analysis of a Solar PV-battery based Islanded Microgrid Inverter output Voltage Control using Dual-loop PID Controller. In Proceedings of the 2022 IEEE IAS Global Conference on Emerging Technologies (GlobConET), Arad, Romania, 20–22 May 2022; pp. 1–6. [Google Scholar]
- He, J.S.; Zhang, X. Comparison of the Back-Stepping and PID Control of the Three-Phase Inverter with Fully Consideration of Implementation Cost and Performance. Chin. J. Electr. Eng. 2018, 4, 82–89. [Google Scholar]
- Oliveira, T.R.; Fridman, L.; Hsu, L. Sliding-Mode Control and Variable-Structure Systems; Springer: Cham, Switzerland, 2023. [Google Scholar]
- Edwards, C.; Spurgeon, S. Sliding Mode Control Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Vaidyanathan, S.; Lien, C.H. Applications of Sliding Mode Control in Science and Engineering; Springer: New York, NY, USA, 2017. [Google Scholar]
- Özkara, Ö.; Ortatepe, Z.; Karaarslan, A. Implementation of Sliding Mode Control Method for Switched-Inductor Quasi-Z-Source Inverter. In Proceedings of the 2022 Global Energy Conference (GEC), Batman, Turkey, 26–29 October 2022; pp. 179–184. [Google Scholar]
- Anjum, W.; Husain, A.R.; Abdul, A.J.; Abbasi, M.A.; Alqaraghuli, H. Continuous Dynamic Sliding Mode Control Strategy of PWM Based Voltage Source Inverter Under Load Variations. PLoS ONE 2020, 15, e0228636. [Google Scholar] [CrossRef] [PubMed]
- Rajakumar, V.; Anbukumar, K.; Selwynraj, A.I. Sliding Mode Controller-Based Voltage Source Inverter for Power Quality Improvement in Microgrid. IET Renew. Power Gener. 2020, 14, 1860–1872. [Google Scholar] [CrossRef]
- Chaturvedi, S.; Fulwani, D. Integral Sliding Mode Control for Uncertainty Mitigation in Switched Boost Inverters. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020; pp. 1–6. [Google Scholar]
- Pho, B.B.; Tran, T.M.; Nguyen, M.L.; Hoang, P.V. Discrete-Time Quasi Sliding Mode Control of Single-phase T-type Inverters for Residential PV Applications. In Proceedings of the 2020 International Conference on Advanced Mechatronic Systems (ICAMechS), Hanoi, Vietnam, 10–13 December 2020; pp. 1–6. [Google Scholar]
- Wu, L.G.; Liu, J.X.; Vazquez, S.; Mazumder, S.K. Sliding Mode Control in Power Converters and Drives: A Review. IEEE/CAA J. Autom. Sin. 2022, 9, 392–406. [Google Scholar] [CrossRef]
- Chen, M.H. Input-Output Finite-Time Sliding Mode Control of Discrete Time-Varying Systems Under an Adaptive Event-Triggered Mechanism. IEEE Access 2023, 11, 3555–3563. [Google Scholar] [CrossRef]
- Dhar, S.; Dash, P.K. A New Backstepping Finite Time Sliding Mode Control of Grid Connected PV System Using Multivariable Dynamic VSC Model. Int. J. Electr. Power Energy Syst. 2016, 82, 314–330. [Google Scholar] [CrossRef]
- Sun, C.B.; Wang, S.B.; Yu, H.S. Finite-Time Sliding Mode Control Based on Unknown System Dynamics Estimator for Nonlinear Robotic Systems. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 2535–2539. [Google Scholar] [CrossRef]
- Wongvanich, N.; Roongmuanpha, N.; Tangsrirat, W. Finite-Time Integral Backstepping Nonsingular Terminal Sliding Mode Control to Synchronize a New Six-Term Chaotic System and Its Circuit Implementation. IEEE Access 2023, 11, 22233–22249. [Google Scholar] [CrossRef]
- Hu, M.Y.; Ahn, H.; You, K.H. Finite-Time Rapid Global Sliding-Mode Control for Quadrotor Trajectory Tracking. IEEE Access 2023, 11, 22364–22375. [Google Scholar] [CrossRef]
- Dong, H.L.; Yang, X.B.; Gao, H.J.; Yu, X.H. Practical Terminal Sliding-Mode Control and Its Applications in Servo Systems. IEEE Trans. Ind. Electron. 2023, 70, 752–761. [Google Scholar] [CrossRef]
- Narayan, J.; Abbas, M.; Dwivedy, S.K. Robust Non-Singular Fast Terminal Sliding Mode Gait Tracking Control of a Pediatric Exoskeleton. In Proceedings of the 2023 5th International Conference on Bio-Engineering for Smart Technologies (BioSMART), Paris, France, 7–9 June 2023; pp. 1–4. [Google Scholar]
- Kim, Y.J.; Ahn, H.K.; Hu, M.Y.; You, K.H. Improved Non-Singular Fast Terminal Sliding Mode Control for SPMSM Speed Regulation. IEEE Access 2023, 11, 65924–65933. [Google Scholar] [CrossRef]
- Zhang, T.; Jiao, X.H.; Zhang, Y.H. EID-Based Finite-Time Nonsingular Fast Terminal Sliding Mode Control of Autonomous Farming Vehicle. In Proceedings of the 2022 13th Asian Control Conference (ASCC), Jeju, Republic of Korea, 4–7 May 2022; pp. 579–584. [Google Scholar]
- Yang, W.L.; Fan, Y.Q.; Xu, D.Z.; Pan, T.L.; Dong, Y. A Stochastic Configuration Networks-Based Nonsingular Fast Terminal Sliding Mode Control Approach for Indirect Matrix Converter-Driven Permanent Magnet Linear Synchronous Motors. Ind. Artif. Intell. 2023, 1, 6. [Google Scholar] [CrossRef]
- Lian, S.K.; Meng, W.; Shao, K.; Zheng, J.C.; Zhu, S.Q.; Li, H.Y. Full Attitude Control of a Quadrotor Using Fast Nonsingular Terminal Sliding Mode with Angular Velocity Planning. IEEE Trans. Ind. Electron. 2023, 70, 3975–3984. [Google Scholar] [CrossRef]
- Olivas-Martínez, G.; Castañeda, H. Adaptive Single-Gain Non-Singular Fast Terminal Sliding Mode Control for a Quad-rotor UAV Against Wind Perturbations. In Proceedings of the 2023 International Conference on Unmanned Aircraft Systems (ICUAS), Warsaw, Poland, 6–9 June 2023; pp. 1148–1154. [Google Scholar]
- Nie, J.; Hao, L.C.; Zhang, G.H.; Li, Q.; Zhang, X.Y. Nonsingular Fast Terminal Sliding Mode Control of Manipulator Trajectory Tracking Based on Adaptive Finite-Time Disturbance Observer. In Proceedings of the 2023 IEEE International Conference on Mechatronics and Automation (ICMA), Harbin, Heilongjiang, China, 6–9 August 2023; pp. 1149–1154. [Google Scholar]
- Mobayen, S.; Baleanu, D.; Tchier, F. Second-Order Fast Terminal Sliding Mode Control Design Based on LMI for a Class of Non-Linear Uncertain Systems and its Application to Chaotic Systems. J. Vib. Control. 2017, 23, 2912–2925. [Google Scholar] [CrossRef]
- Yang, Y.J.; Liu, S.F. Emerging Studies and Applications of Grey Systems; Springer: Singapore, 2023. [Google Scholar]
- Liu, S.; Yang, Y.; Forrest, J. Grey Data Analysis: Methods, Models and Applications; Springer: Singapore, 2016. [Google Scholar]
- Deng, J.L. Introduction to Grey System Theory. J. Grey Syst. 1989, 1, 1–24. [Google Scholar]
- Liu, S.F.; Lin, Y. Grey Information: Theory and Practical Applications; Springer: London, UK, 2006. [Google Scholar]
- Xie, N.M.; Liu, S.F. Discrete Grey Forecasting Model and Its Optimization. Appl. Math. Model. 2009, 33, 1173–1186. [Google Scholar] [CrossRef]
- Zhang, Y.P.; Li, M.S. Grey System Forecasting Based on MATLAB and Its Example Application. In Proceedings of the 2010 2nd IEEE International Conference on Information Management and Engineering, Chengdu, China, 16–18 April 2010; pp. 48–52. [Google Scholar]
- Shen, Q.Q.; Shi, Q.; Tang, T.P.; Yao, L.Q. A Novel Weighted Fractional GM(1,1) Model and Its Applications. Complexity 2020, 2020, 6570683. [Google Scholar] [CrossRef]
- Bilgil, H. New Grey Forecasting Model with Its Application and Computer Code. AIMS Math. 2020, 6, 1497–1514. [Google Scholar] [CrossRef]
- Li, X.Z.; Kong, J.M.; Wang, C.H. Application of Center Approach Grey GM(1,1) Model to Prediction of Landslide Deformation with a Case Study. J. Eng. Geol. 2007, 15, 673–676. [Google Scholar]
- Song, Z.; Tong, X.; Xiao, X. Center Approach Grey GM (1, 1) Model. Syst. Eng.-Theory Pract. 2001, 21, 110–113. [Google Scholar]
- Qiu, L.; Zhou, M.; Wei, M.H. Center Approach Grey BP Neural Network Prediction Model for Years of Drought Occurrence in Xinzhou District of Wuhan City. In Proceedings of the 2011 5th International Conference on Bioinformatics and Biomedical Engineering, Wuhan, China, 10–12 May 2011; pp. 1–4. [Google Scholar]
- Liu, M.; Zhao, L.D. An Improved GLP Model Base on Complete Center Approach GM(1,1) for Emergency Logistics Distribution. In Proceedings of the 2007 IEEE International Conference on Grey Systems and Intelligent Services, Nanjing, China, 18–20 November 2007; pp. 428–433. [Google Scholar]
- Liu, F.; Wei, X.K.; Liu, Y.; Yin, X.X. Track Quality Prediction Based on Center Approach Markov-Grey GM(1,1) Model. In Proceedings of the 2014 IEEE International Conference on Information and Automation (ICIA), Hailar, China, 28–30 July 2014; pp. 81–86. [Google Scholar]
- Cao, Y.Q.; Wang, Y.M.; Xia, H.W. Non-singular Terminal Sliding Mode Control of DC-DC Buck Converter with Fixed Frequency. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 3452–3456. [Google Scholar]
- Gao, Z.Y.; Guo, G.; Zhang, B. Non-singular Terminal Sliding Mode Heading Control of Surface Vehicles. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 634–638. [Google Scholar]
- Lademakhi, N.Y.; Shiri, R.; Korayem, A.H. Superiority of Finite Time SDRE and Non-singular Terminal SMC Controller for n-DOF Manipulators. In Proceedings of the 6th RSI International Conference on Robotics and Mechatronics (IcRoM 2018), Tehran, Iran, 23–25 October 2018; pp. 315–321. [Google Scholar]
- IEEE Standard 519-2014; IEEE 519 Recommended Practice and Requirements for Harmonic Control in Electric Power Systems. IEEE: New York, NY, USA, 2014.
- IEC Standard 61000-2-2; Environment-Compatibility Levels for Low-Frequency Conducted Disturbances and Signalling in Public Low-Voltage Power Supply Systems. IEC: Geneva, Switzerland, 2002.
- IEEE Standard 1159–2019; IEEE Recommended Practice for Monitoring Electric Power Quality. IEEE: New York, NY, USA, 2019.
- IEC Standard 61000-4-30; Testing and Measurement Techniques-Power Quality Measurement Methods. IEC: Geneva, Switzerland, 2015.
- Gong, C.; Sou, W.K.; Lam, C.S. Reinforcement Learning Based Sliding Mode Control for a Hybrid-STATCOM. IEEE Trans. Power Electron. 2023, 38, 6795–6800. [Google Scholar] [CrossRef]
- Li, J.N.; Yuan, L.; Chai, T.Y.; Lewis, F.L. Consensus of Nonlinear Multiagent Systems with Uncertainties Using Reinforcement Learning Based Sliding Mode Control. IEEE Trans. Circuits Syst. I Regul. Pap. 2023, 70, 424–434. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, L.; Yang, C.Y.; Dai, W. Reinforcement Learning-Based Sliding Mode Tracking Control for the Two-Time-Scale Systems: Dealing with Actuator Attacks. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 3819–3823. [Google Scholar] [CrossRef]
- Mosharafian, S.; Afzali, S.; Bao, Y.J.; Velni, J.M. A Deep Reinforcement Learning-based Sliding Mode Control Design for Partially-known Nonlinear Systems. In Proceedings of the 2022 European Control Conference (ECC), London, UK, 12–15 July 2022; pp. 2241–2246. [Google Scholar]
- Long, T.; Li, E.; Hu, Y.Q.; Yang, L.; Fan, J.F.; Liang, Z.Z.; Guo, R. A Vibration Control Method for Hybrid-Structured Flexible Manipulator Based on Sliding Mode Control and Reinforcement Learning. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 841–852. [Google Scholar] [CrossRef]
- Shen, X.N.; Liu, J.X.; Liu, Z.; Gao, Y.B.; Leon, J.I.; Vazquez, S.; Wu, L.G.; Franquelo, L.G. Sliding Mode Control of Neutral-Point-Clamped Power Converters with Gain Adaptation. IEEE Trans. Power Electron. 2024, 1–13. [Google Scholar] [CrossRef]
- Shen, X.N.; Wu, C.W.; Liu, Z.; Wang, Y.J.; Leon, J.I.; Liu, J.X.; Franquelo, L.G. Adaptive-Gain Second-Order Sliding-Mode Control of NPC Converters Via Super-Twisting Technique. IEEE Trans. Power Electron. 2023, 38, 15406–15418. [Google Scholar] [CrossRef]
- Liu, J.X.; Shen, X.N.; Alcaide, A.M.; Yin, Y.F.; Leon, J.I.; Vazquez, S.; Wu, L.G.; Franquelo, L.G. Sliding Mode Control of Grid-Connected Neutral-Point-Clamped Converters Via High-Gain Observer. IEEE Trans. Ind. Electron. 2022, 69, 4010–4021. [Google Scholar] [CrossRef]
- Wei, B.L.; Xie, N.M.; Hu, A. Optimal Solution for Novel Grey Polynomial Prediction Model. Appl. Math. Model. 2018, 62, 717–727. [Google Scholar] [CrossRef]
- Chen, L.; Liu, Z.B.; Ma, N.N. Time-Delayed Polynomial Grey System Model with the Fractional Order Accumulation. Math. Probl. Eng. 2018, 2018, 3640625. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, Z. A New Grey Quadratic Polynomial Model and Its Application in the COVID–19 in China. Sci. Rep. 2021, 11, 12588. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Wu, W.Z.; Xie, W. Study of the Generalized Discrete Grey Polynomial Model Based on the Quantum Genetic Algorithm. J. Supercomput. 2021, 77, 11288–11309. [Google Scholar] [CrossRef]
- Saxena, A. Optimized Fractional Overhead Power Term Polynomial Grey Model (OFOPGM) for Market Clearing Price Prediction. Electr. Power Syst. Res. 2023, 214, 108800. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| DC-link voltage () | 200 V |
| AC output voltage () | 110 Vrms |
| Frequency of AC output-voltage | 60 Hz |
| Filter inductor () | 0.5 mH |
| Filter capacitor () | 20 μF |
| Resistive load () | 12 ohm |
| Switching frequency | 25 kHz |
| Proposed State-Feedback Control Strategy | |||
|---|---|---|---|
| Simulations | Step-load change (full load to no load) | Step-load change (no load to full load) | Rectified loading |
| Voltage swell | Voltage dip | THD | |
| 4.45 V | 16.45 V | 0.17% | |
| Traditional FTSMC | |||
| Simulations | Step-load change (full load to no load) | Step-load change (no load to full load) | Rectified loading |
| Voltage swell | Voltage dip | THD | |
| 18.98 V | 84.79 V | 12.76% | |
| Proposed State-Feedback Control Strategy | |||
|---|---|---|---|
| Experiments | Step-load change (full load to no load) | Step-load change (no load to full load) | Rectified loading |
| Voltage swell | Voltage dip | THD | |
| 4.94 V | 17.76 V | 0.21% | |
| Traditional FTSMC | |||
| Experiments | Step-load change (full load to no load) | Step-load change (no load to full load) | Rectified loading |
| Voltage swell | Voltage dip | THD | |
| 19.43 V | 85.81 V | 14.48% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, E.-C.; Wu, R.-C.; Chang, H.H.; Cheng, C.-A. A State-Feedback Control Strategy Based on Grey Fast Finite-Time Sliding Mode Control for an H-Bridge Inverter with LC Filter Output. Electronics 2024, 13, 2118. https://doi.org/10.3390/electronics13112118
Chang E-C, Wu R-C, Chang HH, Cheng C-A. A State-Feedback Control Strategy Based on Grey Fast Finite-Time Sliding Mode Control for an H-Bridge Inverter with LC Filter Output. Electronics. 2024; 13(11):2118. https://doi.org/10.3390/electronics13112118
Chicago/Turabian StyleChang, En-Chih, Rong-Ching Wu, Heidi H. Chang, and Chun-An Cheng. 2024. "A State-Feedback Control Strategy Based on Grey Fast Finite-Time Sliding Mode Control for an H-Bridge Inverter with LC Filter Output" Electronics 13, no. 11: 2118. https://doi.org/10.3390/electronics13112118