
Design of a Switching Strategy for Output Voltage Tracking Control in a DC-DC Buck Power Converter
 , , , , , , , and
, , , , , , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
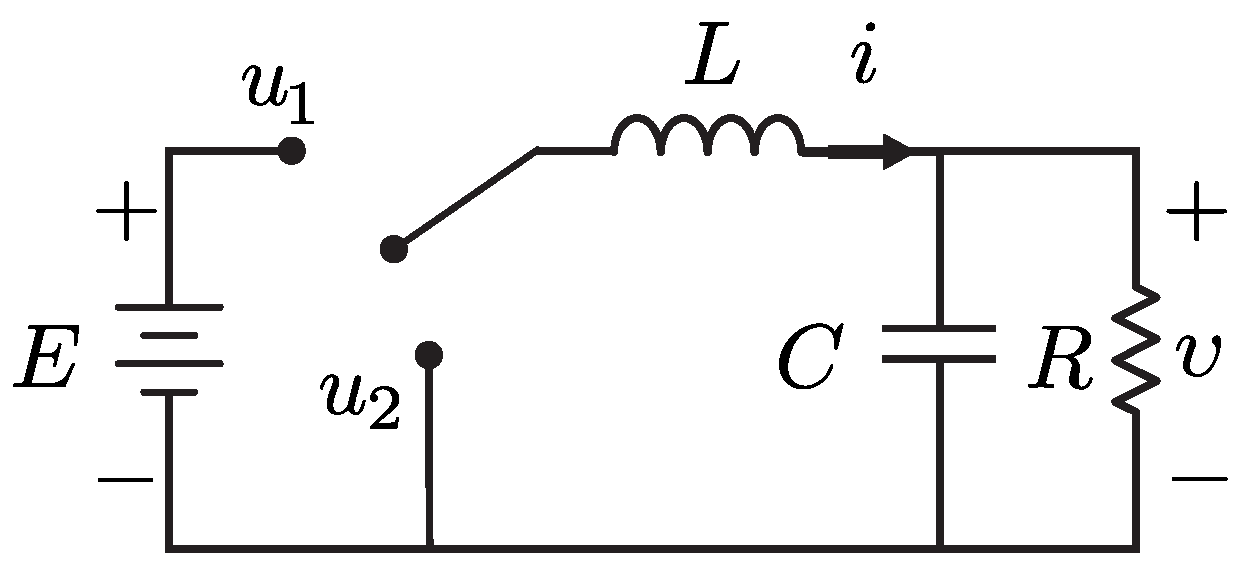
2. Problem Statement
3. Mathematical Concepts
4. Stabilizing Switching Signal Design
5. Simulation Results
5.1. Switching Function Control
5.2. Differential Flatness Control and – Modulator
5.3. Parameters for the Numerical Simulations
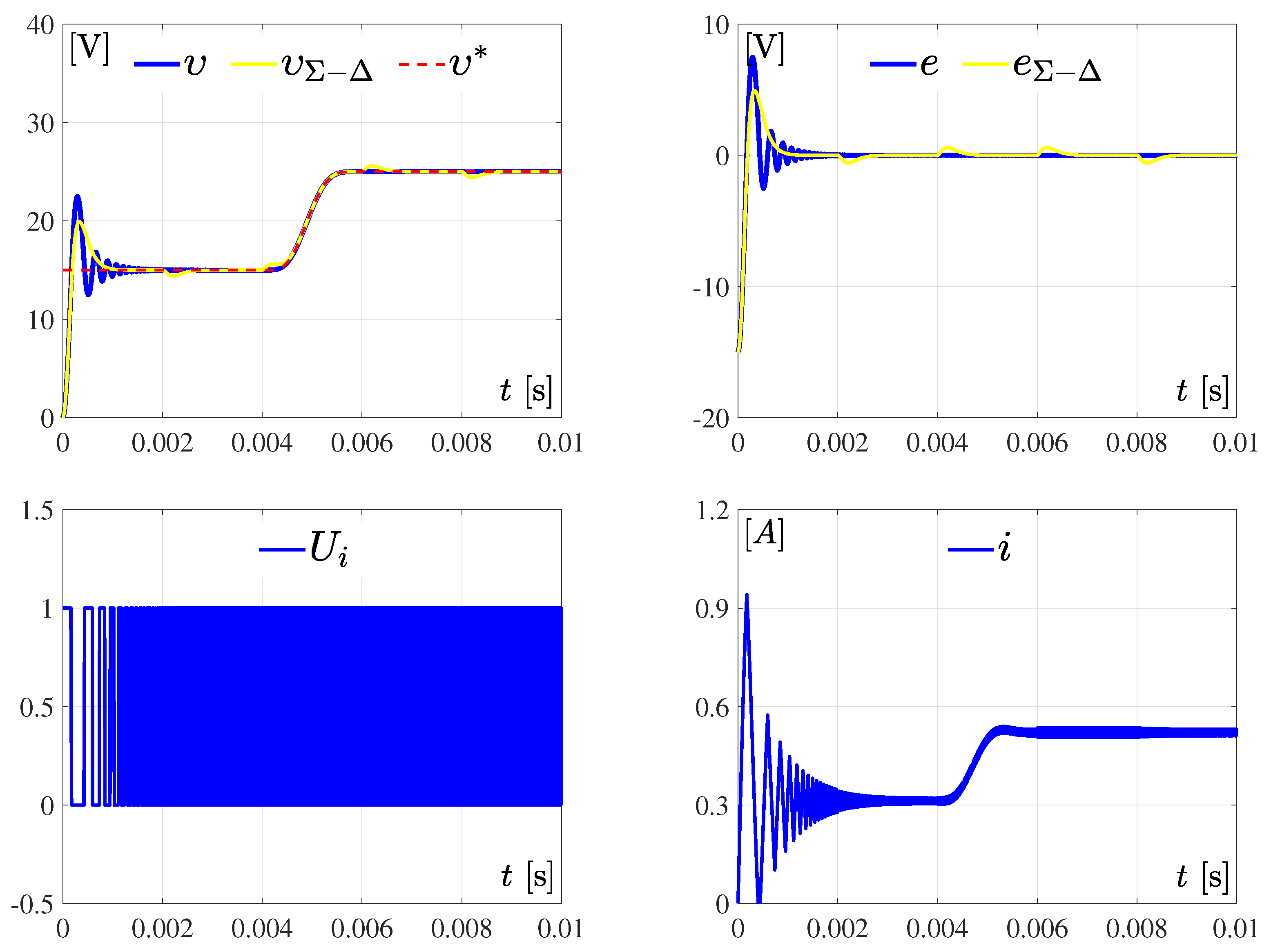
- Bézier-type trajectory
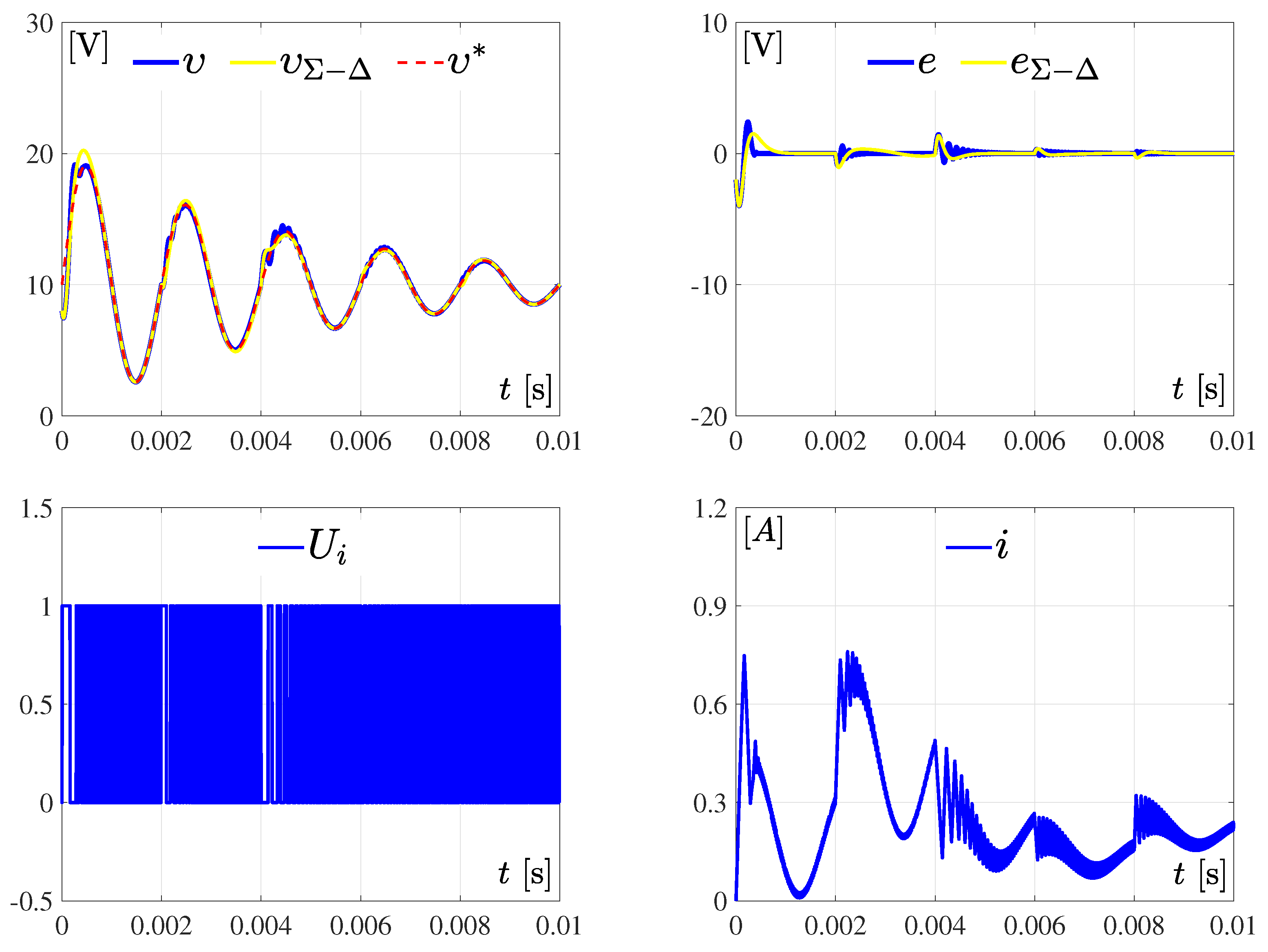
- Sinusoidal trajectory
- Disturbance in voltage source
- Load disturbance
5.4. Numerical Simulations
5.5. Simulations with Circuits
5.6. Comments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Ling, R.; Maksimovic, D.; Leyva, R. Second-order sliding-mode controlled synchronous Buck DC–DC converter. IEEE Trans. Power Electron. 2016, 31, 2539–2549. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Hernández-Guzmán, V.M.; Antonio-Cruz, M.; Muñoz-Carrillo, D. DC/DC Buck power converter as a smooth starter for a DC motor based on a hierarchical control. IEEE Trans. Power Electron. 2015, 30, 1076–1084. [Google Scholar] [CrossRef]
- Hernández-Márquez, E.; García-Sánchez, J.R.; Silva-Ortigoza, R.; Antonio-Cruz, M.; Hernández-Guzmán, V.M.; Taud, H.; Marcelino-Aranda, M. Bidirectional tracking robust controls for a DC/DC Buck converter-DC motor system. Complexity 2018, 2018, 1260743. [Google Scholar] [CrossRef]
- Zhou, K.; Wu, Y.; Wu, X.; Sun, Y.; Teng, D.; Liu, Y. Research and development review of power converter topologies and control technology for electric vehicle fast-charging systems. Electronics 2023, 12, 1581. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, C.; Han, J.; Yang, F.; Shen, Y.; Min, H.; Hu, W. Analysis of voltage control strategies for DC microgrid with multiple types of energy storage systems. Electronics 2023, 12, 1661. [Google Scholar] [CrossRef]
- Narayanaswamy, J.; Mandava, S. Non-isolated multiport converter for renewable energy sources: A comprehensive review. Energies 2023, 16, 1834. [Google Scholar] [CrossRef]
- Venugopal, R.; Chandrasekar, B.; Savio, A.D.; Narayanamoorthi, R.; Aboras, K.M.; Kotb, H.; Ghadi, Y.Y.; Shouran, M.; Elgamli, E. Review on unidirectional non-isolated high gain DC–DC converters for EV sustainable DC fast charging applications. IEEE Access 2023, 11, 78299–78338. [Google Scholar] [CrossRef]
- Coutinho, H.V.; Toledo, J.A.; Silva, L.A.R.; Maia, T.A.C. Design and implementation of a low-cost and low-power converter to drive a single-phase motor. Machines 2023, 11, 673. [Google Scholar] [CrossRef]
- Moreno-Valenzuela, J. A class of proportional-integral with anti-windup controllers for DC–DC Buck power converters with saturating input. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 157–161. [Google Scholar] [CrossRef]
- Aguilar-Ibanez, C.; Moreno-Valenzuela, J.; García-Alarcón, O.; Martinez-Lopez, M.; Acosta, J.A.; Suarez-Castanon, M.S. PI-type controllers and Σ-Δ modulation for saturated DC-DC Buck power converters. IEEE Access 2021, 9, 20346–20357. [Google Scholar] [CrossRef]
- Ma, L.; Zhang, Y.; Yang, X.; Ding, S.; Dong, L. Quasi-continuous second-order sliding mode control of Buck converter. IEEE Access 2018, 6, 17859–17867. [Google Scholar] [CrossRef]
- Deaecto, G.C.; Geromel, J.C.; Garcia, F.S.; Pomilio, J.A. Switched affine systems control design with application to DC–DC converters. IET Control Theory Appl. 2010, 4, 1201–1210. [Google Scholar] [CrossRef]
- Júnior, E.M.; Teixeira, M.C.M.; Cardim, R.; Moreira, M.R.; Assunção, E.; Yoshimura, V.L. On Control design of switched affine systems with application to DC-DC converters. In Frontiers in Advanced Control Systems; de Oliveira Serra, G.L., Ed.; Intech: London, UK, 2012. [Google Scholar]
- Noori, A.; Farsi, M.; Mahboobi Esfanjani, R. Design and implementation of a robust switching strategy for DC–DC converters. IET Power Electron. 2016, 9, 316–322. [Google Scholar] [CrossRef]
- Hejri, M. Practical stability analysis and switching controller synthesis for discrete-time switched affine systems via linear matrix inequalities. Sci. Iran. 2022, 29, 1–28. [Google Scholar] [CrossRef]
- de Souza, R.P.C.; Kader, Z.; Caux, S. Switched affine systems with hysteresis-based switching control: Application to power converters. In Proceedings of the 8th International Conference on Control, Decision and Information Technologies, Istanbul, Turkey, 17–20 May 2022; pp. 212–217. [Google Scholar]
- Chouya, A. Adaptive sliding mode control with chattering elimination for Buck converter driven DC motor. Wseas Trans. Syst. 2023, 22, 19–28. [Google Scholar] [CrossRef]
- Mainardi Júnior, E.I.; de Souza Costa e Silva, L.; Ramalho de Oliveira, D.; da Silva Amorim, E.; Minhoto Teixeira, M.C.; Menegheti Gonçalves, P.E. Control of switched affine systems with bounded sampling time rate on the switching function: Application to Buck DC-DC converter. ElectróNica Potencia 2023, 28, 141–150. [Google Scholar] [CrossRef]
- Hashemi, T.; Mahboobi Esfanjani, R.; Jafari Kaleybar, H. Composite switched Lyapunov function-based control of DC–DC converters for renewable energy applications. Electronics 2024, 13, 84. [Google Scholar] [CrossRef]
- Wai, R.-J.; Shih, L.-C. Design of voltage tracking control for DC–DC Boost converter via total sliding-mode technique. IEEE Trans. Ind. Electron. 2010, 58, 2502–2511. [Google Scholar] [CrossRef]
- Cortes, D.; Alvarez, J.; Alvarez, J.; Fradkov, A. Tracking control of the Boost converter. IEE Proc. Control. Theory Appl. 2004, 151, 218–224. [Google Scholar] [CrossRef]
- Smirnov, G.V. Introduction to the Theory of Differential Inclusions; American Mathematical Society: Providence, RI, USA, 2002. [Google Scholar]
- Isidori, A. Nonlinear Control Systems; Springer: Berlín, Germany, 1989. [Google Scholar]
- Filippov, A.F. Differential Equations with Discontinuous Righthand Sides; Kluwer Academic Publishers: Alphen, The Netherlands, 1988. [Google Scholar]
- Silva-Ortigoza, R.; García-Sánchez, J.R.; Alba-Martínez, J.M.; Hernández-Guzmán, V.M.; Marcelino-Aranda, M.; Taud, H.; Bautista-Quintero, R. Two-stage control design of a Buck converter/DC motor system without velocity measurements via a Σ-Δ-modulator. Math. Probl. Eng. 2013, 2013, 929316. [Google Scholar] [CrossRef]
- Verghese, G.C.; Kassakian, J.; Schlecht, M. Principles of Power Electronics; Adison-Wesley: Boston, MA, USA, 1991. [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernández-Márquez, E.; Cruz-Francisco, P.; Hernández-Castillo, E.; Martinez-Peón, D.; Castro-Linares, R.; García-Sánchez, J.R.; Roldán-Caballero, A.; Siordia-Vásquez, X.; Valdivia-Corona, J.C. Design of a Switching Strategy for Output Voltage Tracking Control in a DC-DC Buck Power Converter. Electronics 2024, 13, 2252. https://doi.org/10.3390/electronics13122252
Hernández-Márquez E, Cruz-Francisco P, Hernández-Castillo E, Martinez-Peón D, Castro-Linares R, García-Sánchez JR, Roldán-Caballero A, Siordia-Vásquez X, Valdivia-Corona JC. Design of a Switching Strategy for Output Voltage Tracking Control in a DC-DC Buck Power Converter. Electronics. 2024; 13(12):2252. https://doi.org/10.3390/electronics13122252
Chicago/Turabian StyleHernández-Márquez, Eduardo, Panuncio Cruz-Francisco, Eric Hernández-Castillo, Dulce Martinez-Peón, Rafael Castro-Linares, José Rafael García-Sánchez, Alfredo Roldán-Caballero, Xóchitl Siordia-Vásquez, and Juan Carlos Valdivia-Corona. 2024. "Design of a Switching Strategy for Output Voltage Tracking Control in a DC-DC Buck Power Converter" Electronics 13, no. 12: 2252. https://doi.org/10.3390/electronics13122252