
Localization of Coordinated Cyber-Physical Attacks in Power Grids Using Moving Target Defense and Machine Learning


Abstract
1. Introduction
2. Related Works
Deep Summary of Existing Works
- (1)
- A method to acquire data is proposed.
- (2)
- Elaborately determine the total number of multi-classifications.
- (3)
- Design three algorithms for solving the CCPA localization problem via SVM, RF and 1D-CNN approaches, respectively.
3. Theory Analysis
3.1. State Estimation & Bad Data Detection
3.2. Coordinated Cyber-Physical Attacks
3.2.1. Undetectable FDIAs
3.2.2. CCPA
3.3. Moving-Target Defense
3.3.1. D-FACTS Deployment and Operation
3.3.2. CCPA Localization Based on MTD
4. Proposed Method
4.1. Three Algorithms for Solving SCCPAs Localizaiton
4.2. Data Sampling Method Design
4.3. Algorithm Development of SCCPA Localization Based on SVM
| Algorithm 1: Conducting the problem of SCCPA localization based on an SVM |
| Input: The training data , the training label , the testing data , the testing label . Output: Several metrics. 1: for i = 1, 2, …, n do 2: Extract the data corresponding to label i from to obtain a new dataset, denoted as ; 3: Randomly extract the same amount of data from to form another dataset, denoted as ; 4: Integrate and to shape a new dataset simultaneously, construct a new column vector (named as ) where the elements corresponding to are set as “1” and the elements corresponding to are set as “−1”; 5: Train the model using C and D. 6: End for 7: for i = 1, 2, …, n do 8: Prediction with utilizing the trained model and , and then obtain a matrix, denoted as label_scorei . 9: End for 10: Construct a new matrix named as score , the i-th column in the score is the second column of label_scorei. 11: Establish an empty vector final_labels . 12: for i=1, 2, …, b do 13: Max function is applied to the i-th row vector in score and obtain the final prediction label assigned to the i-th element of final_labels. 14: End for 15: Acquire several metrics via and final_labels. |
4.4. Algorithm Development of SCCPA Localization Based on RF
| Algorithm 2: Conducting the problem of SCCPA localization based on an RF |
| Input: The training data , the training label , the testing data , the testing label . Output: Confusion matrix. 1: A is transposed and assigned to the matrix P_train, similarly B is transposed and assigned to the matrix P_test. 2: is transposed and assigned to the vector T_train, similarly is transposed and assigned to the vector T_test. 3: Set a number, denoted as N, and N is equal to b. 4: Normalize P_train and obtain a normalized matrix p_train and the mapping structure ps_input. 5: Apply mapminmax function to format P_test based on ps_input, and acquire a matrix p_test. 6: T_train is assigned to a new vector t_train, and T_test is also assigned to a new vector t_test. 7: p_train, p_test, t_train and t_test are all transposed. After being transposed, they are the training data formatted, the testing data formatted, the training label and the testing label, respectively. 8: Set the minimum number of leaves to 1. 9: Apply TreeBagger function to train the model. 10: Apply p_train and the trained model to predict the training label, denoted as T_sim1, similarly apply p_test and the trained model to predict the testing label, termed by T_sim2. 11: Apply confusionchart function to obtain a confusion matrix for the training data based on T_train and T_sim1. 12: Apply confusionchart function to obtain a confusion matrix for the testing data based on T_test and T_sim2. |
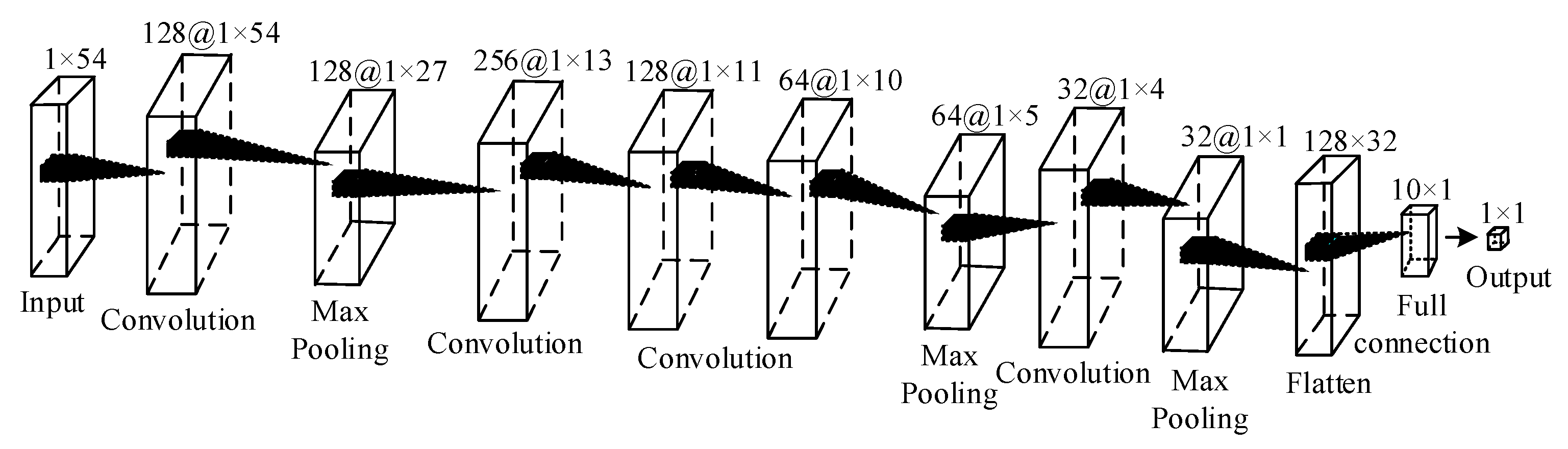
4.5. Architecture Design of 1D-CNN
5. Simulation
5.1. Hardware and Softwar Configuration
5.2. Sampled Data Acquisition
5.2.1. Sampled Data Acquisition for the IEEE 14-bus Power System
5.2.2. Sampled Data Acquisition for the IEEE 30-bus Power System
5.2.3. Sampled Data Acquisition for the IEEE 118-bus Power System
5.3. Sampled Data Quality Inspection
5.4. The Solution for SCCPA Localization via Three Algorithms for the IEEE 14-bus Power System
5.5. The Solution for SCCPA Localization via Three Algorithms for the IEEE 30-bus Power System
5.6. The Solution for SCCPA Localization via Three Algorithms for the IEEE 118-bus Power System
5.7. Experimental Analysis
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| SG | Smart grid |
| FDIAs | False data injection attacks |
| CCPAs | Coordinated cyber-physical attacks |
| PMUs | Phasor measurement units |
| ML | Machine learning |
| MTD | Moving target defense |
| D-FACTS | Distributed flexible AC transmission system |
| WLS | Weighted least squares |
| BDD | Bad data detection |
| Graph representing the topology of the system | |
| Set of the buses in the system | |
| Set of the lines in the system | |
| i, j | Bus index |
| Susceptance of the line between buses i and j | |
| Vector of all measurements | |
| H | Measurement matrix |
| Measurement error vector | |
| θ | Voltage phase angles vector |
| Voltage phase angle at bus i | |
| r | Measurement residual vector |
| τ | Threshold of the BDD system |
| A | Reduced branch–bus incidence matrix |
| D | Diagonal branch susceptance matrix |
| a | Attack vector |
| Compromised vector of all measurements | |
| XGBoost | Extreme gradient boosting |
| SVM | Support vector machine |
| RF | Random forest |
| CNN | Convolutional neural network |
References
- Presekal, A.; Stefanov, A.; Rajkumar, V.S.; Palensky, P. Attack graph model for cyber-physical power systems using hybrid deep learning. IEEE Trans. Smart Grid 2023, 14, 4007–4020. [Google Scholar] [CrossRef]
- Lakshminarayana, S.; Belmega, E.V.; Poor, H.V. Moving-target defense against cyber-physical attacks in power grids via game theory. IEEE Trans. Smart Grid 2021, 12, 5244–5257. [Google Scholar] [CrossRef]
- Li, Z.; Shahidehpour, M.; Alabdulwahab, A.; Abusorrah, A. Bilevel model for analyzing coordinated cyber-physical attacks on power systems. IEEE Trans. Smart Grid 2016, 7, 2260–2272. [Google Scholar] [CrossRef]
- Deng, R.; Zhuang, P.; Liang, H. CCPA: Coordinated cyber-physical attacks and countermeasures in smart grid. IEEE Trans. Smart Grid 2017, 8, 2420–2430. [Google Scholar] [CrossRef]
- Said, D.; Elloumi, M.; Khoukhi, L. Cyver-attack on P2P energy transaction between connected electric vehicles: A false data injection detection based machine learning model. IEEE Access 2022, 10, 63640–63647. [Google Scholar] [CrossRef]
- He, Y.; Mendis, G.J.; Wei, J. Real-time detection of false data injection attacks in smart grid: A deep learning-based intelligent mechanism. IEEE Trans. Smart Grid 2017, 8, 2505–2526. [Google Scholar] [CrossRef]
- Sayghe, A.; Anubi, O.M.; Konstantinou, C. Adversarial examples on power systems state estimate. In Proceedings of the IEEE 2020 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 1–5 February 2020. [Google Scholar]
- Zhang, Z.; Tian, Y.; Deng, R.; Ma, J. A double-benefit moving target defense against cyber-physical attacks in smart grid. IEEE Internet Things J. 2022, 9, 17912–17925. [Google Scholar] [CrossRef]
- Liu, C.; Wu, J.; Long, C.; Kundur, D. Reactance perturbation for detecting and identifying FDI attacks in power system state estimation. IEEE J. Sel. Top. Signal Process 2018, 12, 763–776. [Google Scholar] [CrossRef]
- Lakshminaraya, S.; Yau, D.K.Y. Cost-benefit analysis of moving target defense in power grids. IEEE Trans. Power Syst. 2021, 36, 1152–1163. [Google Scholar] [CrossRef]
- Zhang, Z.; Deng, R.; Yau, D.K.Y.; Cheng, P.; Chen, J. Analysis of moving target defense against false data injection attacks on power grid. IEEE Trans. Inf. Forensics Secur. 2020, 15, 2320–2335. [Google Scholar] [CrossRef]
- Higgins, M.; Teng, F.; Parisini, T. Stealthy MTD against unsupervised learning-based blind FDI attacks in power systems. IEEE Trans. Inf. Forensics Secur. 2021, 16, 1275–1287. [Google Scholar] [CrossRef]
- Wang, S.; Bi, S.; Zhang, Y.-J.A. Locational detection of the false data injection attack in a smart grid: A multilabel classification approach. IEEE Internet Things J. 2020, 7, 8218–8227. [Google Scholar] [CrossRef]
- Boyaci, O.; Narimani, M.R.; Davis, K.R.; Ismail, M.; Overbye, T.J.; Serpedin, E. Joint detection and localization of stealth false data injection attacks in smart grids using graph neural networks. IEEE Trans. Smart Grid 2022, 13, 807–819. [Google Scholar] [CrossRef]
- Peng, S.; Zhang, Z.; Deng, R.; Cheng, P. Localizing false data injection attacks in smart grid: A spectrum-based neural network approach. IEEE Trans. Smart Grid 2023, 14, 4827–4838. [Google Scholar] [CrossRef]
- Zhu, J.; Meng, W.; Sun, M.; Yang, J.; Song, Z. FLLF: A fast-lightweight location detection framework for false data injection attacks in smart grids. IEEE Trans. Smart Grid 2024, 15, 911–920. [Google Scholar] [CrossRef]
- Chen, Y.; Lakshminarayana, S.; Teng, F. Localization of coordinated cyber-physical attacks in power grids using moving target defense and deep learning. In Proceedings of the 2022 IEEE International Conference on Communications, Control, and Computing Technologies for Smart Grids (SmartGridComm), Singapore, 25–28 October 2022. [Google Scholar]
- Yu, J.; Li, Q. Optimal deployment in moving target defense against coordinated cyber-physical attacks via game theory. Electronics 2023, 12, 2484. [Google Scholar] [CrossRef]
- Yu, J.; Li, Q. Moving target defense for detecting coordinated cyber-physical attacks on power grids via a modified sensor measurement expression. Electronics 2023, 12, 1679. [Google Scholar] [CrossRef]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995. [Google Scholar]
- Khabbouchi, I.; Said, D.; Oukaira, A.; Mellal, I. Machine learning and game theoretic model for advanced wind energy management protocol (AWEMP). Energies 2023, 16, 2179. [Google Scholar] [CrossRef]
- Ham, J.; Chen, Y.; Crawford, M.M.; Ghosh, J. Investigation of the random forest framework for classification of hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 492–501. [Google Scholar] [CrossRef]
- Tan, Z.; Chen, J.; Kang, Q.; Zhou, M.; Abusorrah, A.; Sedraoui, K. Dynamic embedding projection-gated convolutional neural networks for text classification. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 973–982. [Google Scholar] [CrossRef]
- Nudell, T.R.; Nabavi, S.; Chakrabortty, A. A real-time attack localization algorithm for large power system networks using graph-theoretic techniques. IEEE Trans. Smart Grid 2015, 6, 2551–2559. [Google Scholar] [CrossRef]
- Khalaf, M.; Youssef, A.; El-Saadany, E. Joint detection and mitigation of false data injection attacks in AGC system. IEEE Trans. Smart Grid 2019, 10, 4985–4995. [Google Scholar] [CrossRef]
- Luo, X.; Li, Y.; Wang, X.; Guan, X. Interval observer-based detection and localization against false data injection attack in smart grids. IEEE Internet Things J. 2021, 8, 657–671. [Google Scholar] [CrossRef]
- Mohammadpourfard, M.; Genc, I.; Lakshminarayana, S.; Konstantinou, C. Attack detection and localization is smart grid with image-based deep learning. In Proceedings of the 2021 IEEE International Conference on Communications, Control, and Computing Technologies for Smart Grids (SmartGridComm), Aachen, Germany, 25–28 October 2021. [Google Scholar]
- Angulo, C.; Parra, X.; Català, A. A support vector machine for multi-class classification. Neurocomputing 2003, 55, 57–77. [Google Scholar] [CrossRef]
- Tang, Q.; Qiu, W.; Zhou, Y. Classification of complex power quality disturbances using optimized s-transform and kernel SVM. IEEE Trans. Ind. Electron. 2020, 67, 9715–9723. [Google Scholar] [CrossRef]
- Chen, Y.; Mao, Q.; Wang, B.; Duan, P.; Zhang, B.; Hong, Z. Privacy-preserving multi-class support vector machine model on medical diagnosis. IEEE J. Biomed. Health Inform. 2022, 26, 3342–3353. [Google Scholar] [CrossRef] [PubMed]
- Rezvani, S.; Wu, J. Handling multi-class problem by intuitionistic fuzzy twin support vector machines based on relative density information. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 14653–14664. [Google Scholar] [CrossRef] [PubMed]
- Yuan, S.; Sun, Y.; He, W.; Gu, Q.; Xu, S.; Mao, Z.; Tu, S. MSLM-RF: A spatial feature enhanced random forest for on-board hyperspectral image classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5534717. [Google Scholar] [CrossRef]
- Chen, D.; Yongchareon, S.; Lai, E.M.-K.; Sheng, Q.Z.; Liesaputra, V. Locally weighted ensemble-detection-based adaptive random forest classifier for sensor-Based online activity recognition for multiple residents. IEEE Internet Things J. 2022, 15, 13077–13085. [Google Scholar] [CrossRef]
- Tong, F.; Zhang, Y. Spectral-spatial and cascaded multilayer random forests for tree species classification in airborne hyperspectral Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4411711. [Google Scholar] [CrossRef]
- Wang, T.; Xue, F.; Zhou, Y.; Ming, A. MARF: Multiscale adaptive-switch random forest for leg detection with 2-D laser scanners. IEEE Trans. Cybern. 2023, 53, 6200–6210. [Google Scholar] [CrossRef]
- Li, S.; Chen, Z.; Li, X.; Lu, J.; Zhou, J. Unsupervised variational video hashing with 1D-CNN-LSTM networks. IEEE Trans. Multimed. 2020, 6, 1542–1554. [Google Scholar] [CrossRef]
- Tabrizi, S.S.; Pashazadeh, S.; Javani, V. Comparative study of table tennis forehand strokes classification using deep learning and SVM. IEEE Sens. J. 2020, 20, 13552–13561. [Google Scholar] [CrossRef]
- Xiao, D.; Chen, Y.; Li, D.D.-U. One-dimensional deep learning architecture for fast fluorescence lifetime imaging. IEEE J. Sel. Top. Quantum Electron. 2021, 27, 7000210. [Google Scholar] [CrossRef]
- Yang, S.; Zhou, J.; Zhao, Y.; Hua, G.; Sun, H.; Zheng, N. Robust and efficient star identification algorithm based on 1-D convolutional neural network. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4156–4167. [Google Scholar] [CrossRef]
- Mohine, S.; Bansod, B.S.; Bhalla, R.; Basra, A. Acoustic modality based hybrid deep 1D CNN-BiLSTM algorithm for moving vehicle classification. IEEE Trans. Intell. Transp. Syst. 2022, 23, 16206–16216. [Google Scholar] [CrossRef]
- Husari, F.; Seshadrinath, J. Incipient interturn fault detection and severity evaluation in electric drive system using hybrid HCNN-SVM based model. IEEE Trans. Ind. Inform. 2022, 18, 1823–1832. [Google Scholar] [CrossRef]
- Lee, G.; Kim, S.-W.; Jeon, M. Machinery value estimation method based on IIoT system utilizing 1D-CNN model for low sampling rate vibration signals from MEMS. IEEE Internet Things J. 2023, 14, 12261–12275. [Google Scholar] [CrossRef]
- Du, W.; Hu, P.; Wang, H.; Gong, X.; Wang, S. Fault diagnosis of rotating machinery based on 1D–2D joint convolution neural network. IEEE Trans. Ind. Electron. 2023, 70, 5277–5285. [Google Scholar] [CrossRef]
- Xu, Y.; Feng, K.; Yan, X.; Sheng, X.; Sun, B.; Liu, Z.; Yan, R. Cross-modal fusion convolutional neural networks with online soft-label training strategy for mechanical fault diagnosis. IEEE Trans. Ind. Inform. 2024, 20, 73–84. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Publication Year | Algorithm Used | Main Contributions |
|---|---|---|---|
| Cecilio Angulo et al. [28] | 2003 | SVM with a “1-1-r” structure | Am SVM, named as KSVCR, was designed based on Vapnik’s support vector theory. |
| Qiu Tang et al. [29] | 2020 | KSVM | An optimized S-transform (OST) and a kernel SVM (KSVM). Subsequently, a classification framework to detect and classify various PQD signals through integrating OST and KSVM was developed. |
| Yange Chen et al. [30] | 2022 | Multi-class SVMs composed of several binary classification SVMs | A privacy-preserving medical diagnosis scheme based on multi-class SVMs and a secure computing protocol to calculate the key process of the SVM classification algorithm. |
| Salim Rezvani et al. [31] | 2023 | SVM with a “1-1-r” | The intuitionistic fuzzy twin SVM (IFTSVM) can reduce the negative impact of noise and outliers. A new version of the IFTSVM using relative density information was proposed. Then, all the training points were evaluated using a “1-1-r” strategy to construct the k-class classification hyperplanes. |
| Shuai Yuan et al. [32] | 2022 | RF | A multiscale local maximum RF (MSLM-RF) was proposed. The MSLM-RF relied on RF for classification after spectral and spatial features fusion. |
| Dong Chen et al. [33] | 2022 | RF | Based on a locally weighted ensemble detection-based adaptive RF(LED-ARF) classifier, a novel OL architecture was proposed [33]. |
| Fei Tong et al. [34] | 2022 | RF | A spectral–spatial and cascaded multilayer RF(SSCMRF) method was proposed to classify tree species in a high-spatial-resolution hyperspectral image [34]. Two classification stages were adopted to fully exploit the spatial information. By concatenating the output of the superpixel-based classification, two kinds of spatial information were integrated. |
| Tianxi Wang et al. [35] | 2023 | RF | A multiscale adaptive-switch RF was proposed. First, the adaptive-switch decision tree was designed to use noise-sensitive features to conduct binary classification [35]. Second, a multiscale RF structure to detect legs at different distances was designed. |
| Shuyan Li et al. [36] | 2020 | 1D-CNN-LSTM | A 1D-CNN-LSTM model, shaped by fusing 1D-CNN and a long-short term memory (LSTM) network, was designed to better exploit the global information of videos. The model processed long frame sequences in a parallel and hierarchical way and exploited the correlations between frames to reconstruct the frame-level features [36]. |
| Sahar S. Tabrizi et al. [37] | 2020 | SVM with RBF LSTM 2D-CNN | A comparative study was performed to examine the forehand strokes classification of three ML models in table tennis [37]. The paper studied tuning the models’ parameters and examining sensitivities of the models and type of data. |
| Dong Xiao et al. [38] | 2021 | 1D-CNN | A deep learning architecture with 1D-CNN was presented for quickly analyzing fluorescence lifetime imaging (FLIM) data. Simultaneously, the reason of selecting the 1D-CNN was thoroughly illustrated. |
| Shaofei Yang et al. [39] | 2022 | 1D-CNN | A robust and efficient star identification algorithm utilizing 1D-CNN was proposed. Moreover, a combined star points selection strategy technique and a mixed initial features extraction technique were presented. |
| Shailesh Mohine et al. [40] | 2022 | 1D-CNN-BiLSTM | An acoustic modality-based hybrid deep 1D-CNN-bidirectional LSTM technique for moving vehicle classification was proposed. The high-level features sequentially detected from experimentally generated vehicles signal were automatically extracted, and these features were kept in the network for analyzing the time-varying characteristic for classification by the presented algorithm. |
| Fatima Husari et al. [41] | 2022 | Hybrid HCNN-SVM | For the incipient interturn fault diagnosis of drive-fed machines, a novel two-level hybrid architecture consisting of CNN and SVM was created. The first level of the structure was to identify the pattern of interturn fault, and the second level was developed to recognize the fault severity. The shared layers of HCNN can automatically extract the features, which were suitably used to train the SVM for classification. |
| Gyuho Lee et al. [42] | 2023 | 1D-CNN | After a sensor was designed to acquire the vibration and magnetic field data of equipment, a 1D CNN was proposed to classify the status of machinery based on the data from the sensor. |
| Wenliao Du et al. [43] | 2023 | 1D-2D Joint CNN | Combining a 1D-CNN and 2D-CNN can make full use of their advantages. A 1D-2D joint CNN was constructed for rotating machinery fault diagnosis. Specifically, 1D convolution can obtain the multiscale feature vectors of the vibration signal; these feature vectors were transformed into 2D maps, and then these 2D vectors were injected into the 2D CNN. |
| Yadong Xu et al. [44] | 2024 | CMFCNN | A cross-modal fusion convolutional neural network (CMFCNN), which adopted two parallel modality-specific networks and a cross-modal knowledge-sharing network was proposed. To achieve effective feature propagation and fusion, a cross-modal fusion module was introduced to integrate cross-modal features and pass the fused information to the next layer [44]. |
| Lab | Tripping Line Set | Lab | Tripping Line Set | Lab | Tripping Line Set | Lab | Tripping Line Set | Lab | Tripping Line Set |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 11 | 2 | 17 | 3 | 19 | 4 | 20 | 5 | 11, 17 |
| 6 | 11, 19 | 7 | 11, 20 | 8 | 17, 19 | 9 | 17, 20 | 10 | 19, 20 |
| Lab | Tripping Line Set | Lab | Tripping Line Set | Lab | Tripping Line Set | Lab | Tripping Line Set | Lab | Tripping Line Set |
|---|---|---|---|---|---|---|---|---|---|
| 0 | 17 | 1 | 18 | 2 | 21 | 3 | 22 | 4 | 17, 18 |
| 5 | 17, 21 | 6 | 11, 22 | 7 | 18, 21 | 8 | 18, 22 | 9 | 21, 22 |
| Test Macro | Total Number of Training Sessions | Testing Set Error Rate (Softmax) | Testing Set Error Rate (Softprob) |
|---|---|---|---|
| IEEE 14-bus power system | 100 | 0.0 | 0.0 |
| IEEE 30-bus power system | 100 | 0.000943 | 0.000943 |
| IEEE 118-bus power system | 100 | 0.0 | 0.0 |
| Classification | Approach | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| SVM | RF | 1D-CNN | |||||||
| P | R | F1 | P | R | F1 | P | R | F1 | |
| 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 2 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 3 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 4 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 5 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0.986 | 0.993 |
| 6 | 1 | 1 | 1 | 1 | 1 | 1 | 0.982 | 1 | 0.99 |
| 7 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 8 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 9 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0.987 | 0.993 |
| 10 | 1 | 1 | 1 | 1 | 1 | 1 | 0.987 | 1 | 0.993 |
| Approach | Highest-Acc (%) | Minimum-Acc (%) | Avg-Acc (%) | Avg-F1 (%) |
|---|---|---|---|---|
| SVM | 100 | 100 | 100 | 100 |
| RF | 100 | 100 | 100 | 100 |
| 1D-CNN | 100 | 98.2 | 99.7 | 99.7 |
| Classification | Approach | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| SVM | RF | 1D-CNN | |||||||
| P | R | F1 | P | R | F1 | P | R | F1 | |
| 1 | 0.552 | 0.692 | 0.614 | 0.996 | 1 | 0.998 | 0.923 | 1 | 0.96 |
| 2 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0.998 | 0.999 |
| 3 | 1 | 1 | 1 | 1 | 1 | 1 | 0.978 | 0.932 | 0.95 |
| 4 | 0.595 | 0.446 | 0.51 | 1 | 1 | 1 | 1 | 0.928 | 0.96 |
| 5 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0.954 | 0.977 |
| 6 | 0.9789 | 0.994 | 0.986 | 1 | 1 | 1 | 0.88 | 1 | 0.937 |
| 7 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 8 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 9 | 1 | 1 | 1 | 1 | 1 | 1 | 0.967 | 0.92 | 0.943 |
| 10 | 1 | 1 | 1 | 1 | 1 | 1 | 0.9876 | 1 | 0.994 |
| Approach | Highest-Acc (%) | Minimum-Acc (%) | Avg-Acc (%) | Avg-F1 (%) |
|---|---|---|---|---|
| SVM | 100 | 55.2 | 91.3 | 91.1 |
| RF | 100 | 99.6 | 99.96 | 99.98 |
| 1D-CNN | 100 | 88 | 97.4 | 97.2 |
| Classification | Approach | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| SVM | RF | 1D-CNN | |||||||
| P | R | F1 | P | R | F1 | P | R | F1 | |
| 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 2 | 1 | 1 | 1 | 1 | 1 | 1 | 0.992 | 1 | 0.996 |
| 3 | 1 | 1 | 1 | 1 | 1 | 1 | 0.981 | 0.983 | 0.982 |
| 4 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 5 | 1 | 1 | 1 | 1 | 1 | 1 | 0.979 | 0.983 | 0.981 |
| 6 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0.994 | 0.997 |
| 7 | 1 | 1 | 1 | 1 | 1 | 1 | 0.985 | 1 | 0.992 |
| 8 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0.995 | 0.998 |
| 9 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0.988 | 0.993 |
| 10 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 11 | 1 | 1 | 1 | 1 | 1 | 1 | 0.988 | 1 | 0.994 |
| Approach | Highest-Acc (%) | Minimum-Acc (%) | Avg-Acc (%) | Avg-F1 (%) |
|---|---|---|---|---|
| SVM | 100 | 100 | 100 | 100 |
| RF | 100 | 100 | 100 | 100 |
| 1D-CNN | 100 | 97.9 | 97.8 | 99.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Li, Q.; Li, L. Localization of Coordinated Cyber-Physical Attacks in Power Grids Using Moving Target Defense and Machine Learning. Electronics 2024, 13, 2256. https://doi.org/10.3390/electronics13122256
Yu J, Li Q, Li L. Localization of Coordinated Cyber-Physical Attacks in Power Grids Using Moving Target Defense and Machine Learning. Electronics. 2024; 13(12):2256. https://doi.org/10.3390/electronics13122256
Chicago/Turabian StyleYu, Jian, Qiang Li, and Lei Li. 2024. "Localization of Coordinated Cyber-Physical Attacks in Power Grids Using Moving Target Defense and Machine Learning" Electronics 13, no. 12: 2256. https://doi.org/10.3390/electronics13122256
APA StyleYu, J., Li, Q., & Li, L. (2024). Localization of Coordinated Cyber-Physical Attacks in Power Grids Using Moving Target Defense and Machine Learning. Electronics, 13(12), 2256. https://doi.org/10.3390/electronics13122256