Fault-Tolerant Three-Vector Model-Predictive-Control-Based Grid-Connected Control Strategy for Offshore Wind Farms

Abstract
:1. Introduction
- (1)
- Replacing the single-vector control used in conventional MPC with three-vector control helps eliminate significant output power fluctuations due to errors between the desired and actual vectors; the replacement thereby enhances control accuracy.
- (2)
- In the proposed fault-tolerant control, the network-side converter station of the offshore wind farm is managed in the event of a single-phase bridge-arm failure, ensuring the normal grid connection for the offshore wind power source.
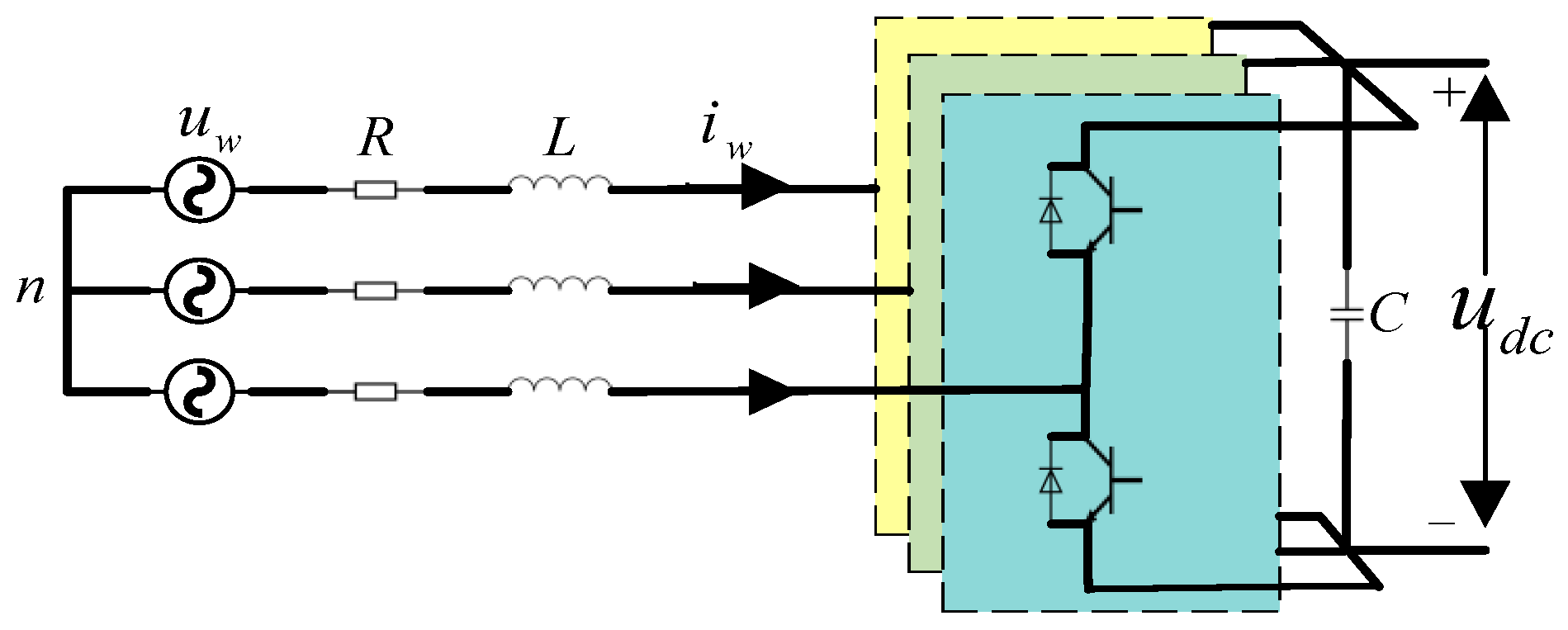
2. Control Strategy for OWF-VSC
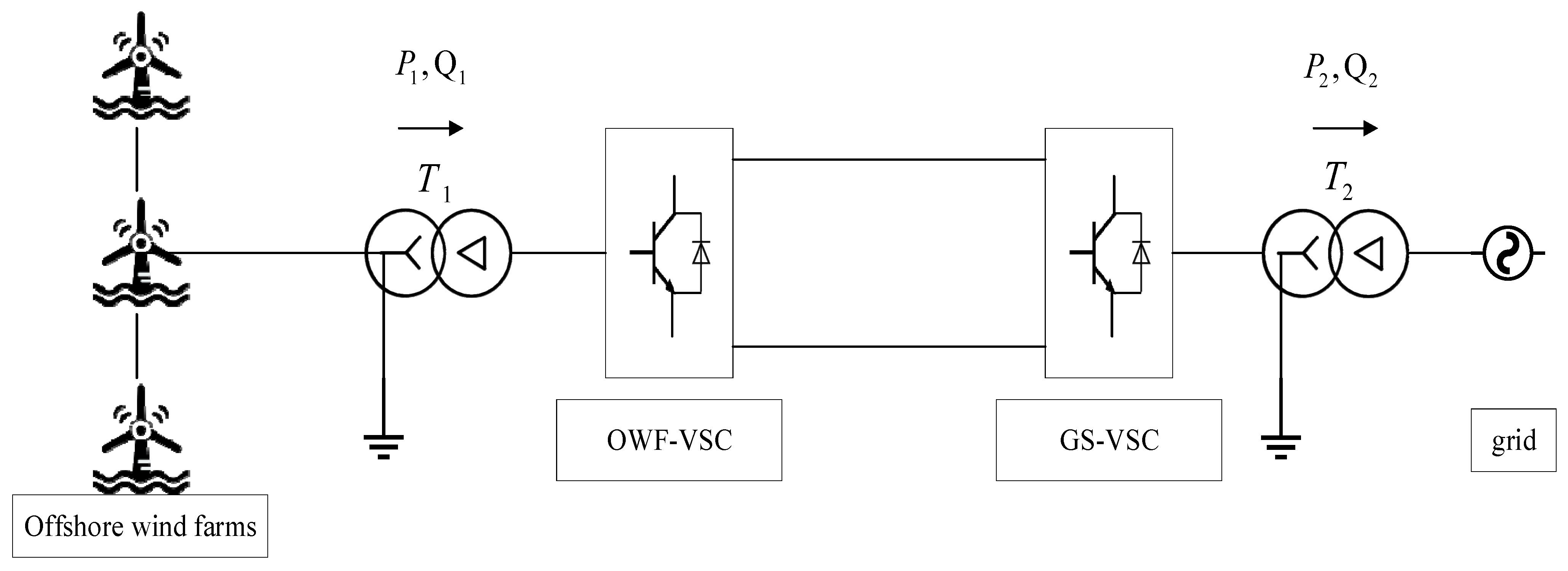
2.1. Basic Framework of the Offshore Wind Farm
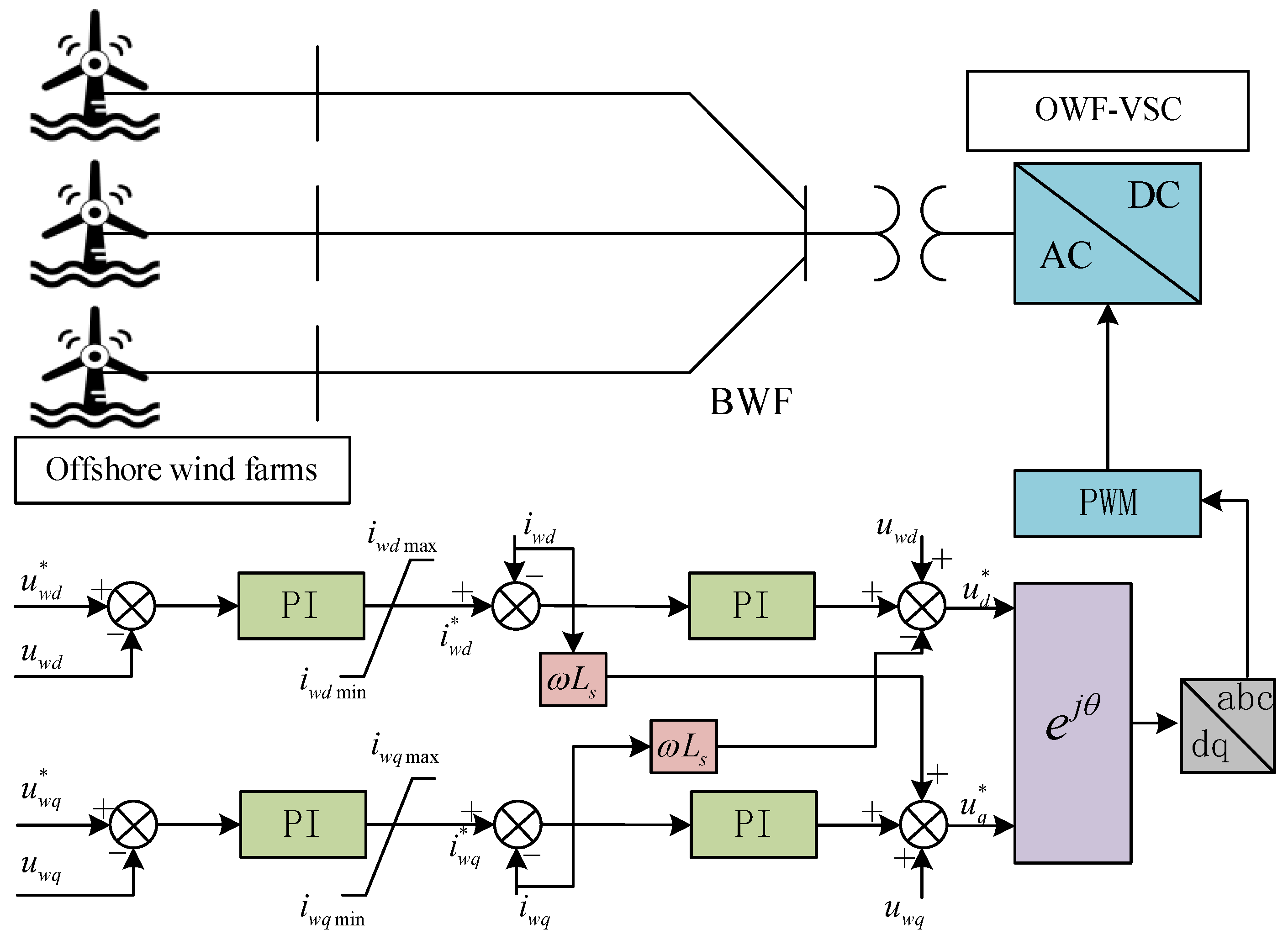
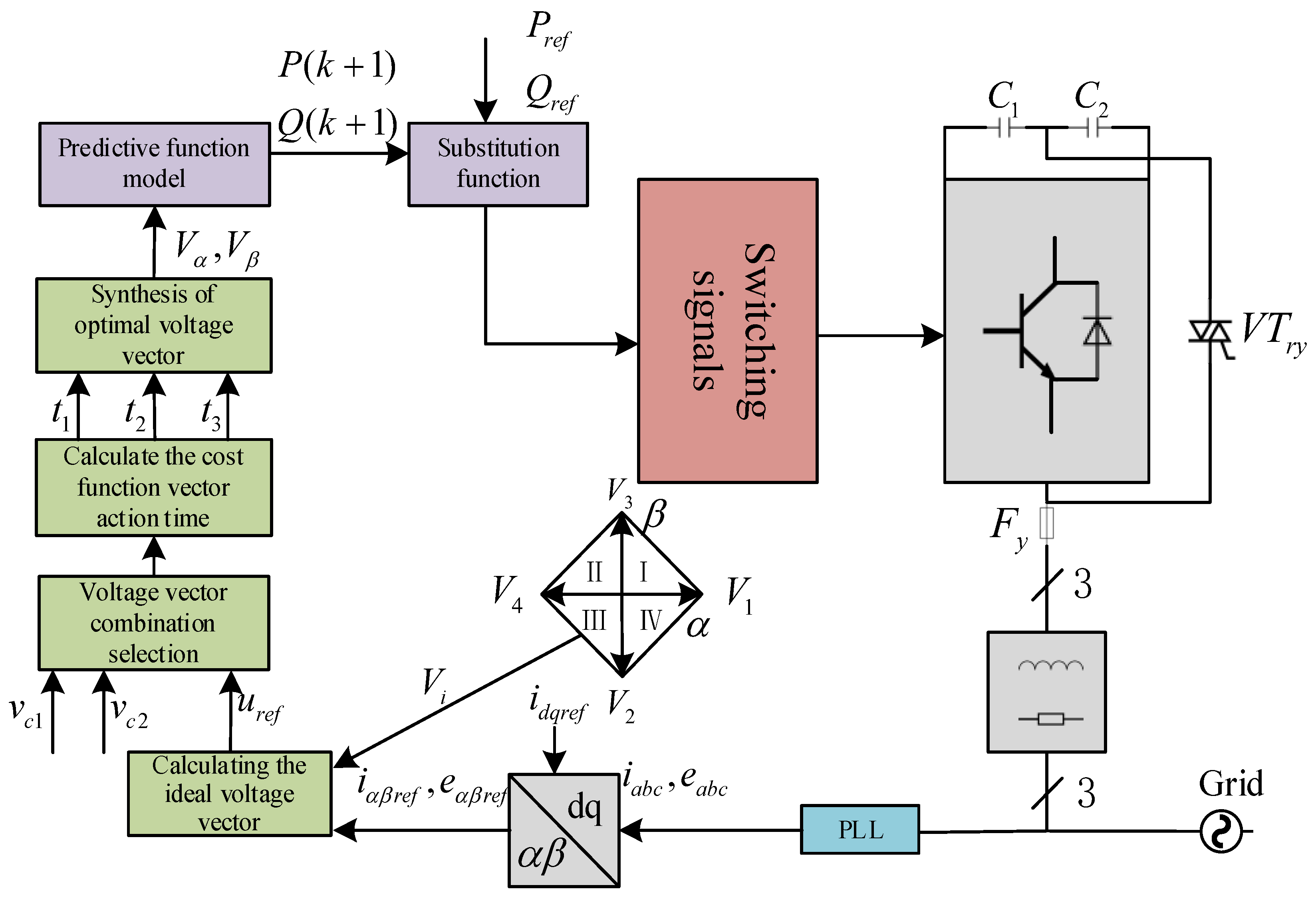
2.2. Control Strategy
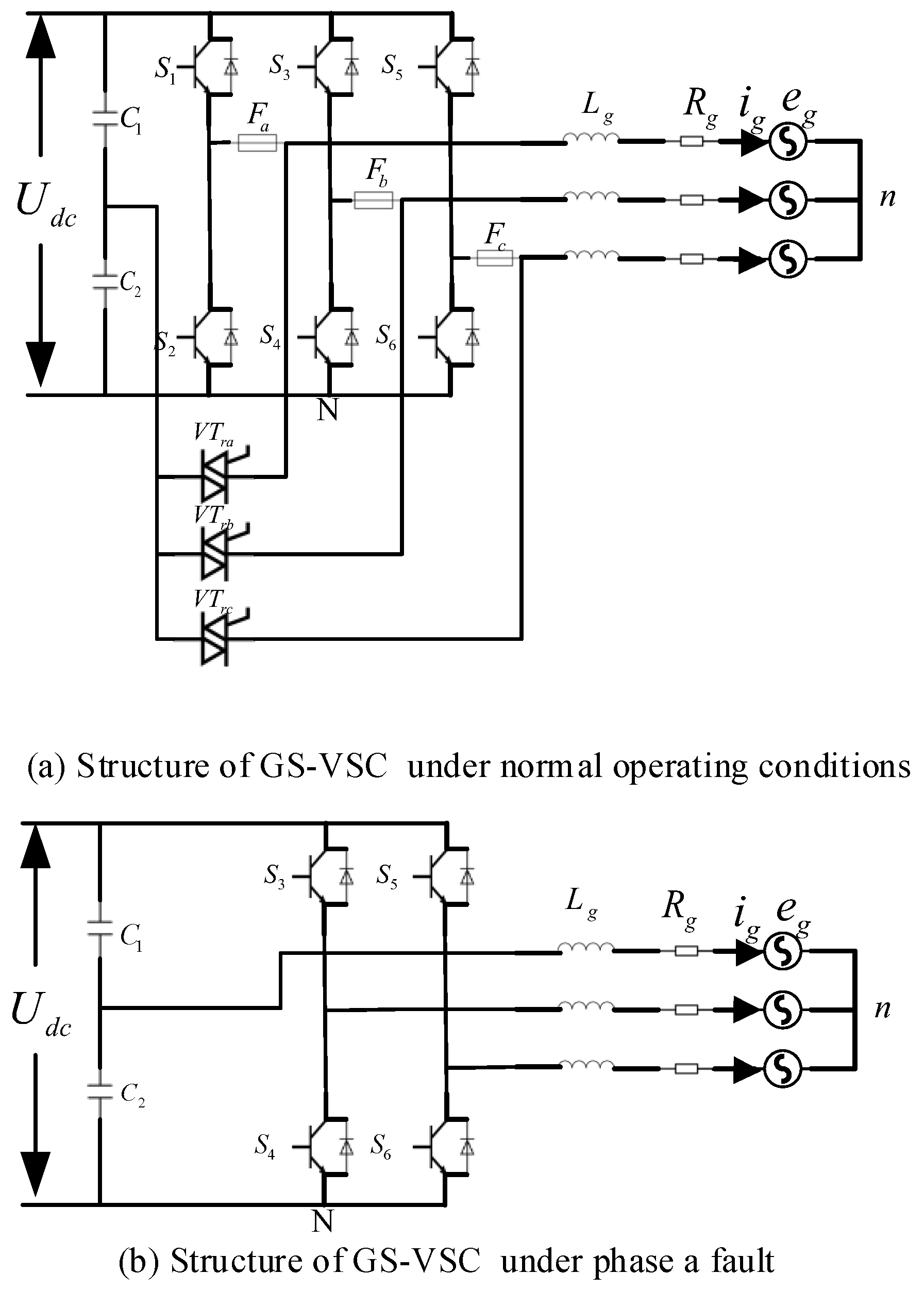
3. Fault-Tolerant Control Strategies for GS-VSC
3.1. Discrete Prediction Model for GS-VSC
3.2. Fault-Tolerant Control Strategy for GS-VSC Based on MPC
- (1)
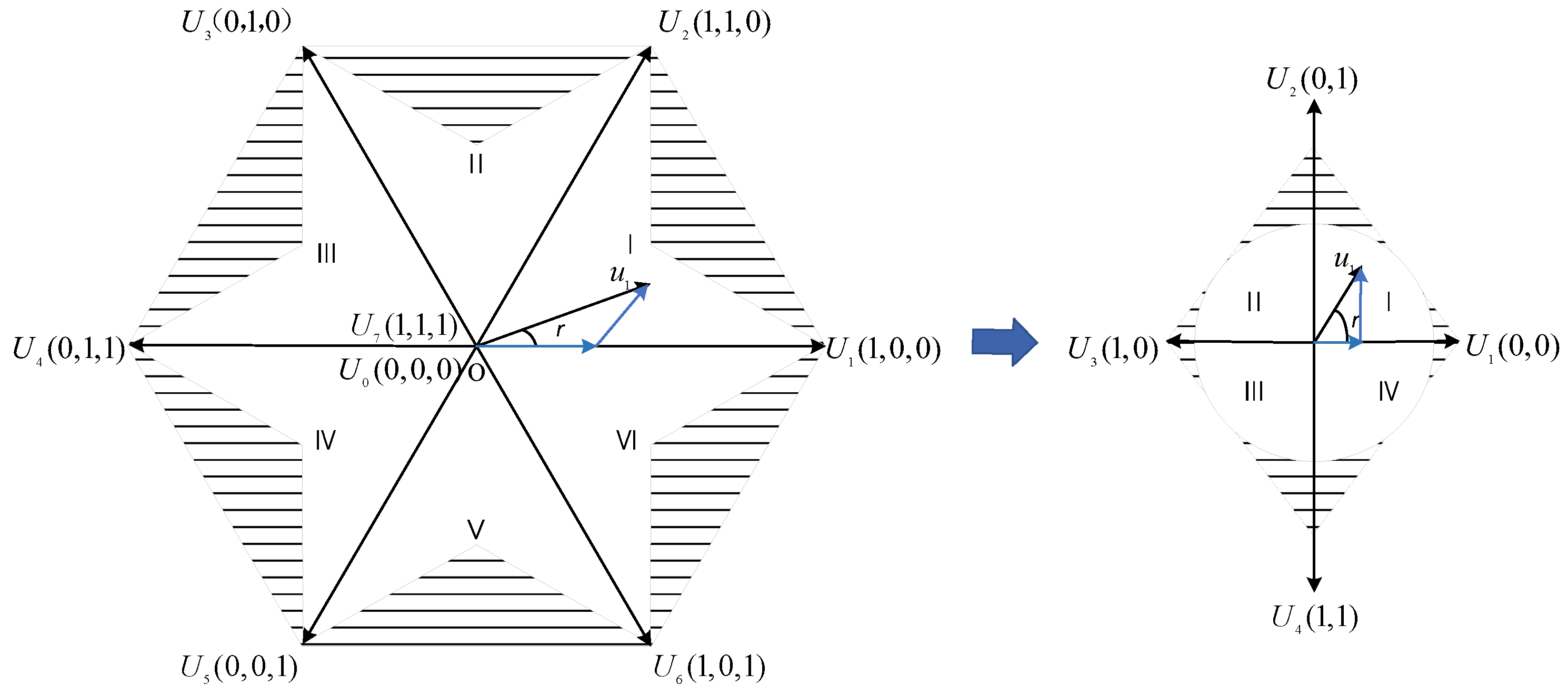
- Under normal operation of the converter station: If the target vector u1 is determined to be in Sector I of the spatial vectors, the optimal set of voltage vectors that minimizes the cost function consists of the nearest non-zero vectors U1 and U2, along with the zero vector U0 or U7.To reduce the switching losses and lower the switching frequency, the voltage vectors can be sequentially arranged with only one pulse signal change at a time. For example, for the target vector in Sector I, the sequence of applied voltage vectors is {U0, U1, U2, U7, U2, U1, U0}.
- (2)
- Under fault-tolerant operation of the converter station (phase a fault): If the target vector u1 is determined to be in Sector I of the spatial vectors, the optimal set of voltage vectors that minimizes the cost function consists of the nearest non-zero vectors U1 and U2. In this case, since there are no zero vectors in the fault-tolerant state, a pair of non-zero vectors with equal magnitudes but in the opposite direction, such as U1 and U4, are used to synthesize the zero vector. Similarly, to reduce switching losses and lower the switching frequency, the sequence of applied voltage vectors is .
- (3)
- Particular cases in which the target voltage vector lies at the boundary of sectors: Under normal operation, only the nearest non-zero vector that coincides with the target voltage vector needs to be synthesized, along with the zero vector. Under fault-tolerant operation, only the nearest non-zero vector that coincides with the target voltage vector and its corresponding non-zero vector of equal magnitude but opposite direction need to be synthesized.
4. Example Analysis
4.1. Case Description
4.1.1. Case 1: Grid-Side AC Three-Phase Fault Conditions
4.1.2. Case 2: Sudden Changes in Reactive Power
4.1.3. Case 3: Sudden Changes in DC Busbar Voltage
4.1.4. Case 4: Single-Phase Bridge-Arm Faults in the GS-VSC
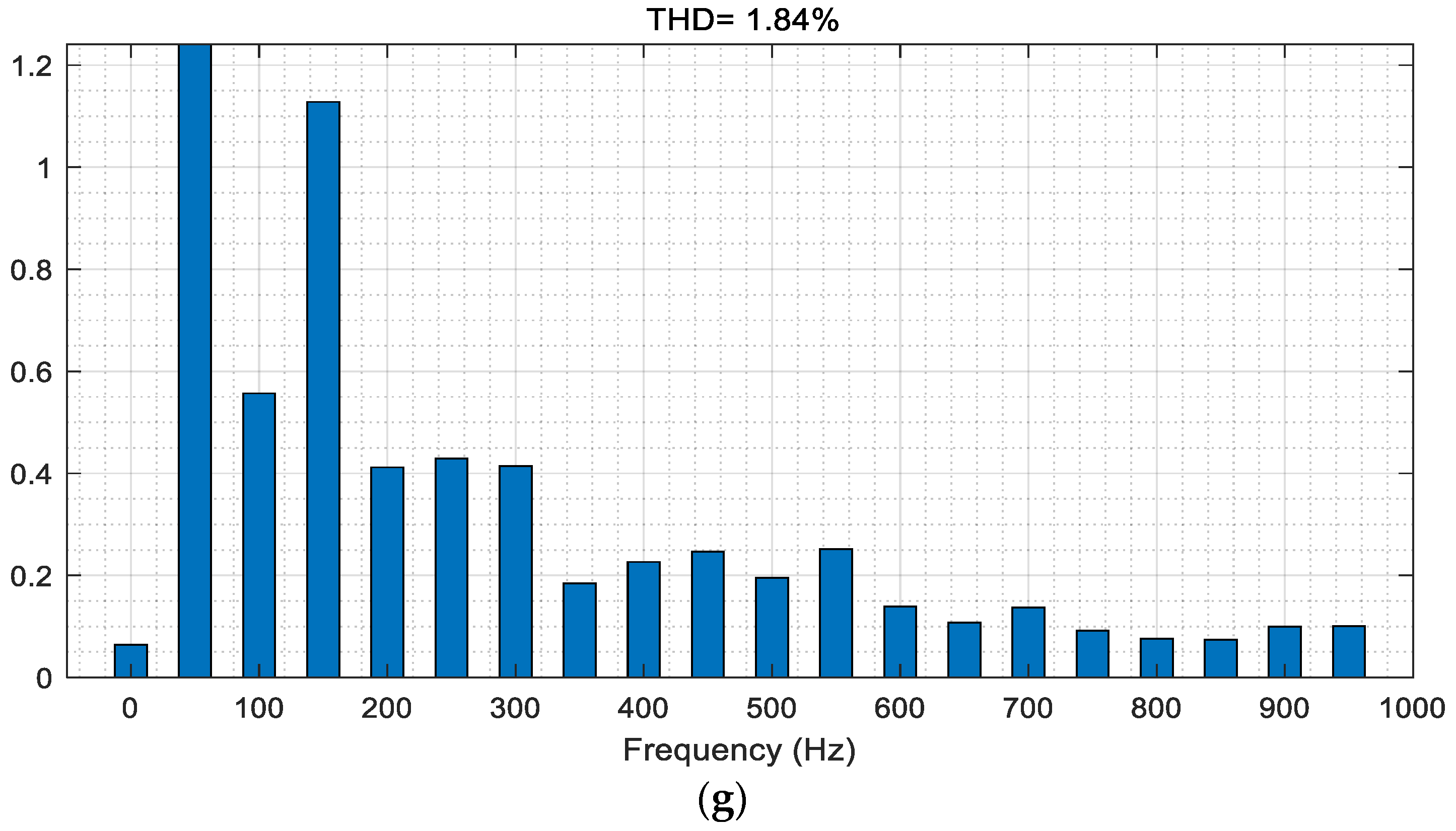
4.2. Comparative Analysis of Harmonic Distortion Rates
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, J.Z.; Ma, L.; Wang, Q.; Fang, F.; Zhu, Y. Offshore wind power supports China’s energy transition. Strateg. Study Chin. Acad. Eng. 2021, 23, 149–159. [Google Scholar]
- She, J.; Blauw, A.; Laakso, L.; Mourre, B.; Schulz-Stellenfleth, J.; Wehde, H. Fit-for-Purpose Information for Offshore Wind Farming Applications—Part-II: Gap Analysis and Recommendations. J. Mar. Sci. Eng. 2023, 11, 1817. [Google Scholar] [CrossRef]
- Carayannis, E.G.; Ilinova, A.; Cherepovitsyn, A. The future of energy and the case of the arctic offshore: The role of strategic management. J. Mar. Sci. Eng. 2021, 9, 134. [Google Scholar] [CrossRef]
- Yang, B.; Liu, B.; Zhou, H.; Wang, J.; Yao, W.; Wu, S.; Shu, H.; Ren, Y. A critical survey of technologies of large offshore wind farm integration: Summary, advances, and perspectives. Prot. Control Mod. Power Syst. 2022, 7, 17. [Google Scholar] [CrossRef]
- Fuchs, A.; Imhof, M.; Demiray, T.; Morari, M. Stabilization of Large Power Systems Using VSC–HVDC and Model Predictive Control. IEEE Trans. Power Deliv. 2014, 29, 480–488. [Google Scholar] [CrossRef]
- Cortes, P.; Kazmierkowski, M.P.; Kennel, R.M.; Quevedo, D.E.; Rodriguez, J. Predictive Control in Power Electronics and Drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay Compensation in Model Predictive Current Control of a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2011, 59, 1323–1325. [Google Scholar] [CrossRef]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodriguez, J. Model Predictive Control—A Simple and Powerful Method to Control Power Converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Cortés, P.; Wilson, A.; Kouro, S.; Rodriguez, J.; Abu-Rub, H. Model Predictive Control of Multilevel Cascaded H-Bridge Inverters. IEEE Trans. Ind. Electron. 2010, 57, 2691–2699. [Google Scholar] [CrossRef]
- Rivera, S.; Kouro, S.; Wu, B.; Alepuz, S.; Malinowski, M.; Cortes, P.; Rodriguez, J. Multilevel Direct Power Control—A Generalized Approach for Grid-Tied Multilevel Converter Applications. IEEE Trans. Power Electron. 2014, 29, 5592–5604. [Google Scholar] [CrossRef]
- Cortes, P.; Ortiz, G.; Yuz, J.I.; Rodriguez, J.; Vazquez, S.; Franquelo, L.G. Model Predictive Control of an Inverter With Output $LC$ Filter for UPS Applications. IEEE Trans. Ind. Electron. 2009, 56, 1875–1883. [Google Scholar] [CrossRef]
- Calle-Prado, A.; Alepuz, S.; Bordonau, J.; Nicolas-Apruzzese, J.; Cortés, P.; Rodriguez, J. Model Predictive Current Control of Grid-Connected Neutral-Point-Clamped Converters to Meet Low-Voltage Ride-Through Requirements. IEEE Trans. Ind. Electron. 2015, 62, 1503–1514. [Google Scholar] [CrossRef]
- Dirscherl, C.; Hackl, C.M.; Schechner, K. Explicit model predictive control with disturbance observer for grid-connected voltage source power converters. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 999–1006. [Google Scholar] [CrossRef]
- Guo, L.L.; Zhang, X.; Yang, S.Y.; Xie, Z. An improved model predictive direct torque control method for permanent magnet synchronous generator. Proc. CSEE 2016, 36, 5053–5061. [Google Scholar]
- Aguilera, R.P.; Lezana, P.; Quevedo, D.E. Switched Model Predictive Control for Improved Transient and Steady-State Performance. IEEE Trans. Ind. Inform. 2015, 11, 968–977. [Google Scholar] [CrossRef]
- Zou, J.; Xu, W.; Yu, X.; Liu, Y.; Ye, C. Multistep Model Predictive Control With Current and Voltage Constraints for Linear Induction Machine Based Urban Transportation. IEEE Trans. Veh. Technol. 2017, 66, 10817–10829. [Google Scholar] [CrossRef]
- Yang, X.; Biegler, L.T. Advanced-multi-step nonlinear model predictive control. J. Process Control 2013, 23, 1116–1128. [Google Scholar] [CrossRef]
- Silva, B.; Moreira, C.L.; Seca, L.; Phulpin, Y.; Lopes, J.A.P. Provision of Inertial and Primary Frequency Control Services Using Offshore Multiterminal HVDC Networks. IEEE Trans. Sustain. Energy 2012, 3, 800–808. [Google Scholar] [CrossRef]
- Laraba, M.T.; Olaru, S.; Niculescu, S.I. Linear model predictive control and time-delay implications. IFAC-Pap. 2017, 50, 14406–14411. [Google Scholar]
- Yang, Y.; Wen, H.; Li, D. A fast and fixed switching frequency model predictive control with delay compensation for three-phase inverters. IEEE Access 2017, 5, 17904–17913. [Google Scholar] [CrossRef]
- Uddin, M.; Mekhilef, S.; Nakaoka, M.; Rivera, M. Model predictive control of induction motor with delay time compensation: An experimental assessment. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015. [Google Scholar]
- Zhang, X.; Wang, K.; Zhang, W.; Wang, Y.; Wang, P.; Gao, D. Dual delay-compensation-based model predictive control for the semi-controlled open-winding PMSM system. IEEE Access 2019, 7, 69947–69959. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (1) | |||
| Voltage Vector | Switch Status | ||
| 0, 0, 0 | 0 | 0 | |
| 1, 0, 0 | 0 | ||
| 1, 1, 0 | |||
| 0, 1, 0 | |||
| 0, 1, 1 | 0 | ||
| 0, 0, 1 | |||
| 1, 0, 1 | |||
| 1, 1, 1 | 0 | 0 | |
| (2) | |||
| Voltage Vector | Switch Status | ||
| 0, 0 | 0 | ||
| 1, 0 | |||
| 0, 1 | |||
| 1, 1 | 0 | ||
| (a) | |
| Sector | Order of Voltage Vector Application |
| I | |
| II | |
| III | |
| IV | |
| V | |
| VI | |
| (b) | |
| Sector | Order of Voltage Vector Application |
| I | |
| II | |
| III | |
| IV | |
| Parameters | Numerical Values |
|---|---|
| Wind farm rated power P/MW | 1200 |
| DC voltage | 300 |
| Length of DC transmission lines/km | 250 |
| DC capacitance C/ | 80 |
| Line inductors L/mH | 200 |
| Sampling period | 50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Li, J.; Wang, H.; Li, G.; Ru, Y. Fault-Tolerant Three-Vector Model-Predictive-Control-Based Grid-Connected Control Strategy for Offshore Wind Farms. Electronics 2024, 13, 2316. https://doi.org/10.3390/electronics13122316
Wu J, Li J, Wang H, Li G, Ru Y. Fault-Tolerant Three-Vector Model-Predictive-Control-Based Grid-Connected Control Strategy for Offshore Wind Farms. Electronics. 2024; 13(12):2316. https://doi.org/10.3390/electronics13122316
Chicago/Turabian StyleWu, Jiahui, Jiangyong Li, Haiyun Wang, Guodong Li, and Yalun Ru. 2024. "Fault-Tolerant Three-Vector Model-Predictive-Control-Based Grid-Connected Control Strategy for Offshore Wind Farms" Electronics 13, no. 12: 2316. https://doi.org/10.3390/electronics13122316