
An Innovative Method Based on Wavelet Analysis for Chipless RFID Tag Detection


Abstract
:1. Introduction
2. Theoretical Basis
3. Proposed Method
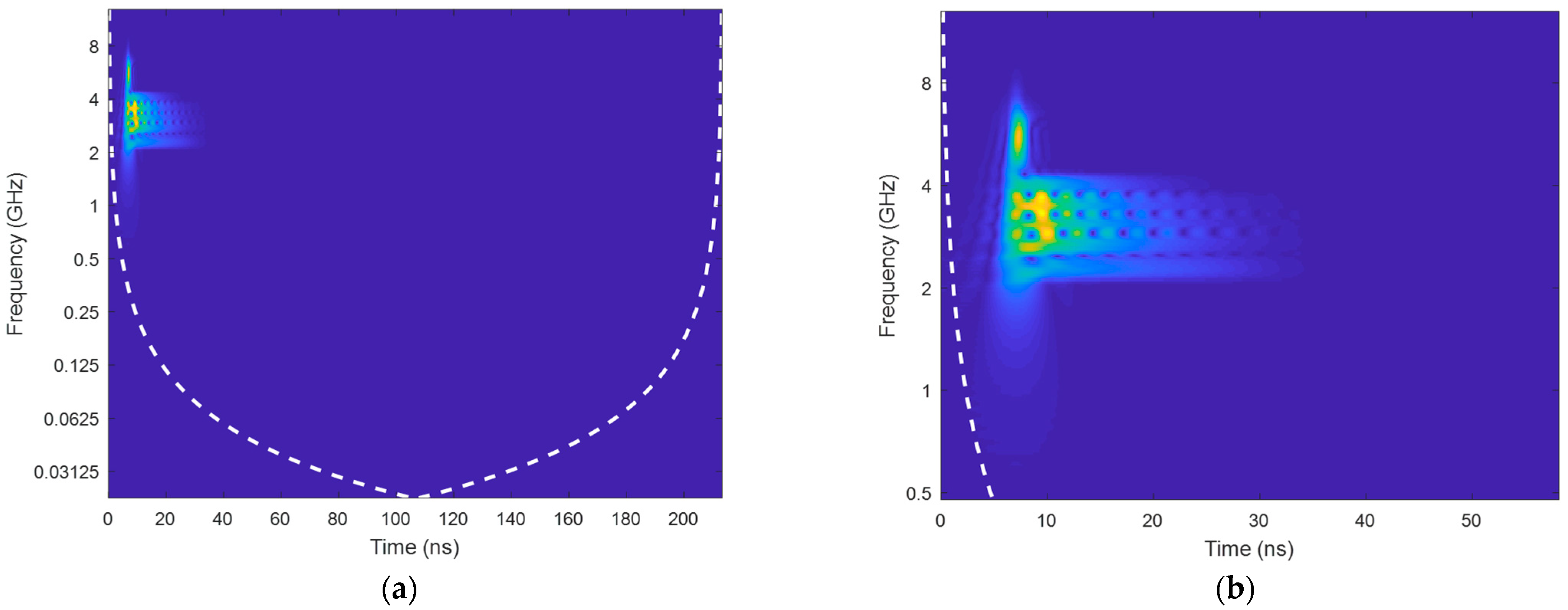
3.1. Tag Reading via CWT
3.2. Time Resolution Enhancement
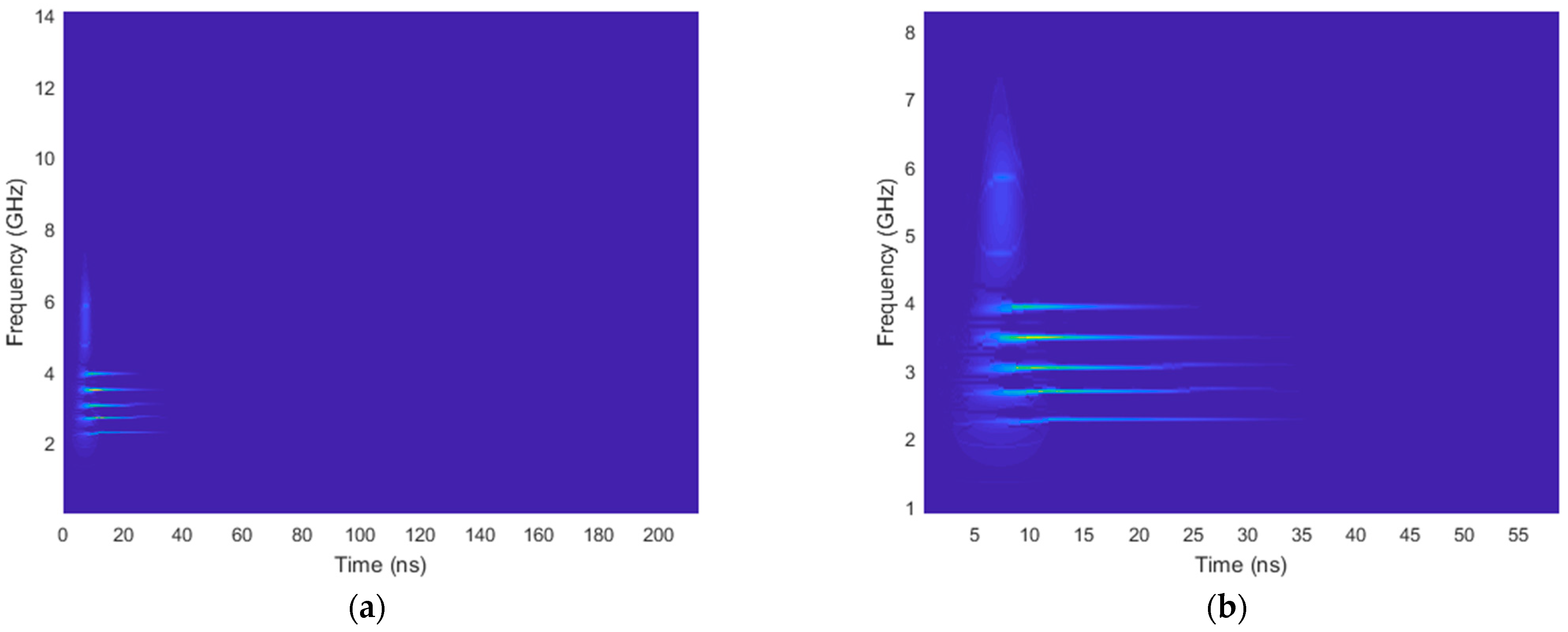
3.3. Frequency Focusing
3.4. Flowchart
4. Simulation
4.1. Parameter Selection Strategy
4.2. Signal Tag Reading
4.3. Multitag Reading
5. Performance Comparison
5.1. Complexity
5.2. Range Resolution
5.3. Robustness
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Preradovic, S.; Karmakar, N.C. Design of fully printable planar chipless RFID transponder with 35-bit data capacity. In Proceedings of the 2009 European Microwave Conference (EuMC), Rome, Italy, 29 September–1 October 2009; pp. 13–16. [Google Scholar]
- Islam, M.A.; Karmakar, C.N. A novel compact printable dualpolarized chipless RFID system. IEEE Trans. Microw. Theory Tech. 2012, 60, 2142–2151. [Google Scholar] [CrossRef]
- Zhao, F.; Zou, C.; Xu, L.; He, Y. Design of a printable chipless RFID tag based on multi-resonator. Chin. Comm. Netw. 2018, 44, 113–116. [Google Scholar]
- Analogictips. Available online: https://www.analogictips.com/how-chipless-rfids-will-revolutionize-consumer-and-defense-applications/ (accessed on 12 April 2024).
- Herrojo, C.; Paredes, F.; Mata-Contreras, J.; Martín, F. Chipless-RFID: A Review and Recent Developments. Sensors 2019, 19, 3385. [Google Scholar] [CrossRef]
- El-Hadidy, M.; El-Awamry, A.; Fawky, A.; Khaliel, M.; Kaiser, T. A novel collision avoidance MAC protocol for multi-tag UWB chipless RFID systems based on Notch Position Modulation. In Proceedings of the 2015 9th European Conference on Antennas and Propagation (EuCAP), Lisbon, Portugal, 13–17 April 2015; pp. 1–5. [Google Scholar]
- Xia, Z. Research on Chipless Multitag MAC Protocol. Master’s Thesis, Southwest University of Science and Technology, Mianyang, China, 22 May 2019. (In Chinese). [Google Scholar]
- Su, C.; Zou, C.; Jiao, L.; Zhang, Q. A MIMO Radar Signal Processing Algorithm for Identifying Chipless RFID Tags. Sensors 2021, 21, 8314. [Google Scholar] [CrossRef] [PubMed]
- Su, C.; Zou, C.; Jiao, L. Chipless RFID identification based on time reversal algorithm. J. Electromagn. Waves Appl. 2023, 37, 1045–1065. [Google Scholar] [CrossRef]
- Costa, F.; Borgese, M.; Gentile, A.; Buoncristiani, L.; Genovesi, S.; Dicandia, F.A.; Bianchi, D.; Monorchio, A.; Manara, G. Robust Reading Approach for Moving Chipless RFID Tags by Using ISAR Processing. IEEE Trans. Microw. Theory Tech. 2018, 66, 2442–2451. [Google Scholar] [CrossRef]
- Rezaiesarlak, R.; Manteghi, M. A new anti-collision algorithm for identifying chipless RFID tags. In Proceedings of the 2013 IEEE Antennas and Propagation Society International Symposium (APSURSI), Orlando, FL, USA, 7–13 July 2013; pp. 1722–1723. [Google Scholar]
- Rezaiesarlak, R.; Manteghi, M. Accurate extraction of early-late time responses using short-time matrix pencil method for transientanalysis of scatterers. IEEE Trans. Antennas Propag. 2015, 63, 4995–5002. [Google Scholar] [CrossRef]
- Ali, Z.; Perret, E.; Barbot, N.; Siragusa, R. Extraction of Aspect-Independent Parameters Using Spectrogram Method for Chipless Frequency-Coded RFID. IEEE Sens. J. 2021, 21, 6530–6542. [Google Scholar] [CrossRef]
- Vena, A.; Perret, E.; Tedjini, S. A fully printable Chipless RFID tag with detuning correction technique. IEEE Microw. Wirel. Compon. Lett. 2012, 22, 209–211. [Google Scholar] [CrossRef]
- Karmakar, N.C.; Amin, E.M.; Saha, J.K. Chipless RFID Reader Architecture. In Chipless RFID Sensors, 1st ed.; Wiley: New York, NY, USA, 2016; pp. 217–224. [Google Scholar] [CrossRef]
- Preradovic, S.; Karmakar, N.C. Multiresonator based chipless RFID tag and dedicated RFID reader. In Proceedings of the 2010 IEEE MTT-S International Microwave Symposium, Anaheim, CA, USA, 23–28 May 2010; pp. 1520–1523. [Google Scholar]
- Koswatta, R.V.; Karmakar, N.C. A novel reader architecture based on UWB chirp signal interrogation for multiresonator-based chipless RFID tag reading. IEEE Trans. Microw. Theory Tech. 2012, 60, 2925–2933. [Google Scholar] [CrossRef]
- Forouzandeh, M.; Karmakar, N. Self-Interference Cancelation in Frequency-Domain Chipless RFID Readers. IEEE Trans. Microw. Theory Tech. 2019, 67, 1994–2009. [Google Scholar] [CrossRef]
- Forouzandeh, M.; Karmakar, N. Towards the Improvement of Frequency-domain Chipless RFID Readers. In Proceedings of the 2018 IEEE Wireless Power Transfer Conference (WPTC), Montreal, QC, Canada, 3–7 June 2018; pp. 1–4. [Google Scholar]
- Rezaiesarlak, R.; Manteghi, M. Short-Time Matrix Pencil Method for Chipless RFID Detection Applications. IEEE Trans. Antennas Propag. 2014, 61, 2801–2806. [Google Scholar] [CrossRef]
- Rezaiesarlak, R.; Manteghi, M. A Space–Time–Frequency Anticollision Algorithm for Identifying Chipless RFID Tags. IEEE Trans. Antennas Propag. 2014, 62, 1425–1432. [Google Scholar] [CrossRef]
- Karmakar, N.; Amin, E. Short Time Fourier Transform (STFT) for collision detection in chipless RFID systems. In Proceedings of the 2015 International Symposium on Antennas and Propagation (ISAP), Hobart, TAS, Australia, 9–12 November 2015; pp. 1–4. [Google Scholar]
- Rioul, O.; Vetterli, M. Wavelets and signal processing. IEEE Signal Proc. Mag. 1991, 8, 14–38. [Google Scholar] [CrossRef]
- Daubechies, I. The wavelet transform, time-frequency localization and signal analysis. IEEE Trans. Inf. Theory 1990, 36, 961–1005. [Google Scholar] [CrossRef]
- Hyvärinen, A.; Karhunen, J.; Oja, E. What is Independent Component Analysis? In Independent Component Analysis, 1st ed.; Wiley: New York, NY, USA, 2001; pp. 151–154. [Google Scholar]
- Hyvärinen, A.; Karhunen, J.; Oja, E. ICA by Maximization of Nongaussianity. In Independent Component Analysis, 1st ed.; Wiley: New York, NY, USA, 2001; pp. 165–201. [Google Scholar]
- Hyvärinen, A.; Oja, E. A Fast Fixed-Point Algorithm for Independent Component Analysis. Neural Comput. 1997, 9, 1483–1492. [Google Scholar] [CrossRef]
- Zarzoso, V.; Comon, P. Robust Independent Component Analysis by Iterative Maximization of the Kurtosis Contrast with Algebraic Optimal Step Size. IEEE Trans. Neural Netw. 2010, 21, 248–261. [Google Scholar] [CrossRef] [PubMed]
- Hyvärinen, A. One-unit contrast functions for independent component analysis: A statistical analysis. In Proceedings of the Neural Networks for Signal Processing VII—1997 IEEE Signal Processing Society Workshop, Amelia Island, FL, USA, 24–26 September 1997; pp. 388–397. [Google Scholar]
- Hyvärinen, A. Fast and robust fixed-point algorithms for independent component analysis. IEEE Trans. Neural Netw. 1999, 10, 626–634. [Google Scholar] [CrossRef]
- Meignen, S.; Oberlin, T.; McLaughlin, S. A New Algorithm for Multicomponent Signals Analysis Based on SynchroSqueezing: With an Application to Signal Sampling and Denoising. IEEE Trans. Signal Process. 2012, 60, 5787–5798. [Google Scholar] [CrossRef]
- Daubechies, I.; Lu, J.; Wu, H.-T. Synchrosqueezed Wavelet Transforms: An empirical mode decomposition-like tool. Appl. Comput. Harmon. Anal. 2011, 30, 243–261. [Google Scholar] [CrossRef]
- Kairov, U.; Cantini, L.; Greco, A.; Molkenov, A.; Czerwinska, U.; Barillot, E.; Zinovyev, A. Determining the optimal number of independent components for reproducible transcriptomic data analysis. BMC Genom. 2017, 18, 712. [Google Scholar] [CrossRef] [PubMed]
- Mur, A.; Dormido, R.; Duro, N.; Mercader, D. An unsupervised method to determine the optimal number of independent components. Expert Syst. Appl. 2017, 75, 56–62. [Google Scholar] [CrossRef]
- Mumtaz, M.; Amber, S.F.; Ejaz, A.; Habib, A.; Jafri, S.I.; Amin, Y. Design and analysis of C shaped chipless RFID tag. In Proceedings of the 2017 International Symposium on Wireless Systems and Networks (ISWSN), Lahore, Pakistan, 19–22 November 2017; pp. 1–5. [Google Scholar]
- Sahoo, G.R.; Freed, J.H.; Srivastava, M. Optimal Wavelet Selection for Signal Denoising. IEEE Access 2024, 12, 45369–45380. [Google Scholar] [CrossRef]
- Cheng, L.; Li, D.; Li, X.; Yu, S. The Optimal Wavelet Basis Function Selection in Feature Extraction of Motor Imagery Electroencephalogram Based on Wavelet Packet Transformation. IEEE Access 2019, 7, 174465–174481. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, G. Study on Optimal Selection of Wavelet Vanishing Moments for ECG Denoising. Sci. Rep. 2017, 7, 4564. [Google Scholar] [CrossRef]
- Silik, A.; Noori, M.; Altabey, W.A.; Ghiasi, R.; Wu, Z. Analytic Wavelet Selection for Time–Frequency Analysis of Big Data Form Civil Structure Monitoring. In Proceedings of the 10th International Conference on Structural Health Monitoring of Intelligent Infrastructure (SHMII 10), Porto, Portugal, 30 June–2 July 2021. [Google Scholar]
- Ngui, W.K.; Leong, M.S.; Hee, L.M.; Abdelrhman, A.M. Wavelet Analysis: Mother Wavelet Selection Methods. Appl. Mech. Mater. 2013, 393, 953–958. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Type | Time Complexity | Run Time (seconds) |
|---|---|---|
| STMPM | 9.351043 | |
| STFT | 0.075236 | |
| CWT | 0.220115 |
| Algorithm Type | STMPM | STFT | Proposed Method |
|---|---|---|---|
| Code Reading | Time pole plot Poles distribution | Time–frequency plot Energy distribution | Time–frequency plot Energy distribution |
| Key Parameter | Poles number Search step size window width | Search step size window width | Wavelet function |
| Computational Efficiency | STMPM for every time window | FT for every time window | CWT+WSST for whole signal |
| Minimum Tag Spacing | ≥0.2 m | ≥0.05 m | 0.05 m |
| Robustness | SNR ≥ 10 dBm | SNR ≥ 0 dBm | SNR ≥ 20 dBm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, C.; Wang, X.; Zou, C.; Jiao, L.; Tao, Y. An Innovative Method Based on Wavelet Analysis for Chipless RFID Tag Detection. Electronics 2024, 13, 2375. https://doi.org/10.3390/electronics13122375
Su C, Wang X, Zou C, Jiao L, Tao Y. An Innovative Method Based on Wavelet Analysis for Chipless RFID Tag Detection. Electronics. 2024; 13(12):2375. https://doi.org/10.3390/electronics13122375
Chicago/Turabian StyleSu, Chen, Xueyuan Wang, Chuanyun Zou, Liangyu Jiao, and Yuchuan Tao. 2024. "An Innovative Method Based on Wavelet Analysis for Chipless RFID Tag Detection" Electronics 13, no. 12: 2375. https://doi.org/10.3390/electronics13122375