Abstract
The fields of indoor localization and positioning have seen extensive research in recent years. Their scientific soundness is of great importance, as information about an entity’s location in indoor environments can lead to innovative services and products. Various techniques and frameworks have been proposed, some of which are already in practical use. This article emphasizes the value of indoor localization data and proposes the adoption of a new virtual field known as the ‘Transactional Area Network’ (TAN). By presenting a custom yet simple real-time, peer-to-peer (and therefore decentralized) software implementation that provides positioning information to users via their smart devices, this article demonstrates the potential value of TAN. Finally, it explores how TAN can increase the adoption rate of indoor positioning applications, enhance interactions between people in nearby locations and therefore amplify data generation.
1. Introduction
1.1. Location Information
Location information is a highly valuable resource that can be utilized by a diverse range of businesses, organizations and applications. The main structure of a user’s location dataset usually consists of their geographic positions, also called ‘coordinates’, which are the latitude and longitude values. This information can be grouped in bigger datasets, containing collections of several people’s positions, coordinates of structures (e.g., buildings) or specific locations of high importance (e.g., monuments) [1]. Furthermore, location data can include elevation and altitude attributes, providing additional information to end-users.
Sources of such information vary based on the kind and nature of the location data each end-user prefers to obtain. One of the main sources for such data is the Global Positioning System (GPS), establishing communication between satellites and devices in order to calculate latitude and longitude coordinates of a given person. Other sources include the Beacons, transmitters of low-energy Bluetooth signals and Wi-Fi, through which devices emit probes as they search for access points. The latter two options can be utilized in order to identify a person’s position in indoor locations, whereas GPS is mainly used to calculate the position of an entity in larger (mainly outdoor) areas.
Both kinds of location data, outdoor and indoor, are being exploited by numerous services. GPS is more well known for the positioning information it provides to millions of users every day, in their route to a destination which they normally do not know how to reach. Today’s applications in smart devices are commonly asking for the user’s permission to collect their location data. Nowadays, even websites tend to ask a user’s permission for acquiring their location information. Based on those facts, one could reach the assumption that location data have become highly valuable and useful across various industries. Yet, indoor localization and nearby environment positioning data are not widely recognized by consumers. Thanks to products such as Tracker Bluetooth Beacons [2] (e.g., Tiles and AirTags), many consumers have become aware of Bluetooth technology’s ability to act as a positioning data generator and provider.
However, the majority of end-users might still not be familiar with the capabilities that indoor positioning data can provide for their own benefit. For example, one can see the usefulness of GPS coordinates by using navigation applications and exploring web-based maps. Such examples are not easy to come by, when it comes to the usefulness of indoor geolocation data (from the end-user’s spectrum). Most consumers are not able to grasp the potential of indoor localization information because, as of today, there have been no signs of mainstream applications—similar to navigation apps—that utilize these data and provide useful digital products. Such applications would be a significant leap forward in the field of location services and could prove to be highly valuable, in various aspects of today’s society.
With the increasing adoption of indoor positioning applications, the generation of data would also eventually grow. Retrieving and managing indoor localization information is important in order to perform extensive analysis and comprehend how they can be leveraged. Indoor positioning can help critical infrastructures and businesses better understand customer behavior, leading to improved marketing strategies and resource allocation. One example is the healthcare sector, which can be benefited by tracking indoor medical equipment and patients more effectively, reducing delays in critical situations. Indoor location services have the potential to transform various industries [3]. Further studies have elaborated on the wide range of applications for indoor positioning systems [4], highlighting their transformative potential across different sectors and the subsequent increase in data generated.
1.2. Indoor Localization as an Area Network
In order to achieve a broader adoption of indoor localization applications in today’s market, and therefore increase the data generation and availability, the research community needs to emphasize the importance of establishing a concept of a simple indoor localization architecture. More specifically, indoor positioning could be viewed as a field of location data exchange between different entities within it. This operation is similar to that of area networks. Several definitions have been provided for what an area network represents. In general, an area network is a type of telecommunications network that connects devices within a specific geographic area. The scope of the area network can vary, from a small room to an entire city, depending on the type and purpose of the network. Common types of area networks include the Local Area Network (LAN), the Wide Area Network (WAN), the Metropolitan Area Network (MAN) and the Personal Area Network (PAN) [5,6,7].
Each type of area network is designed to optimize communication and resource sharing within its designated range, addressing specific needs and requirements of the connected devices and users. This also holds true for the fields of indoor localization and positioning. Therefore, indoor localization could be considered as a new type of area network. This article proposes the establishment of the ‘Transactional Area Network’ (TAN). The word ‘Transactional’ was chosen for this proposal’s definition to reflect the idea that data exchanges between users can be viewed as forms of transactions. By defining TAN and assigning its key characteristics, future indoor localization methods and implementations could adopt a unified architecture. Thus, the adoption of such applications could increase, and the process of data generation would be enhanced.
The term ‘Transactional Area Network’ does not have a definition in the global scientific literature. It is conceptually adopted within the context of this article. The concept of Transactional Area Networks highlights the importance of expanding localized networking solutions tailored to the challenges of indoor environments. This approach aims to promote the development of new technologies and methodologies which will push towards a simple yet efficient implementation, with an emphasis on user data exchange and generation. Thus, this article hopes to encourage further research and innovation in the field of indoor localization, enhancing the user experience in indoor spaces.
As described earlier, this article’s proposal of a Transactional Area Network could serve as basis for future indoor localization frameworks and applications. The subsequent sections explore existing research in the field of indoor positioning and localization (‘Literature Review’), present the conceptualization of the Transactional Area Network (‘TAN Conceptualization’), detail an initial and simple implementation of TAN (‘Proof-of-Concept Implementation’) and conclude the study with discussion and insights (‘Conclusions’).
2. Literature Review
2.1. RSS, PDR and Filtering Techniques
To this day, there have been numerous publications and papers related to indoor geolocation, localization and positioning information. Various implementations have been tested, and several frameworks have been proposed, all related to nearby positioning services, in one way or another. Before any further analysis of this article’s proposal takes place, it is important to go through the most notable existing solutions and frameworks in the field of indoor localization.
One of the most well known proposals is the one published by Zhuang et al., 2016 [3], presenting an indoor localization, smartphone-based system, with the installation of a Bluetooth Beacon network in closed environments. The approach focused on the capabilities of Bluetooth Low Energy (BLE) and Received Signal Strengths (RSS) in indoor positioning detection scenarios, as these two are utilized in a central smart device architecture, along with a series of beacons installed in a given area. The paper proposed an algorithm for indoor localization with BLE Beacons that combined a channel-separate Polynomial Regression Model (PRM), a channel-separate Fingerprinting (FP) method, Outlier Detection tools and Extended Kalman Filtering (EKF).
The aforementioned techniques are commonly used in similar proposals. Polynomial Regression [8] is used along with Fingerprinting [9] in order to estimate the location of an individual, as well as the distances between him and the Bluetooth Low Energy Beacons placed around him. The use of Outlier Detection and the Extended Kalman Filtering method [10] aimed to improve the location data quality (distance and location estimates). While the algorithm proved to be essential in improving the localization accuracy in environments with Tracker Bluetooth Beacons, its need for hardware other than consumer-based smart devices (the proposed method works utilizing BLE Beacons) limited its potential as an easy-to-use framework for the end-users. In addition, the proposal did not investigate the possibility of enabling users to view information of others within the same framework.
Another well-established publication regarding indoor geolocation is this of Chen et al. [11], where a smartphone-based indoor localization and tracking system was proposed, along with iBeacons, in order to study the improvement of step detection, walking direction estimation and initial point estimation, all aspects of Pedestrian Dead Reckoning in smartphones. The paper explored the utilization of sensors integrated within smartphones in conjunction with BLE beacons to establish the precise location of an object. The study took advantage of Apple’s iBeacon framework and also used filter models, like Kalman Filtering, in order to achieve optimum results in the system’s location and tracking information. The user’s position underwent updates whenever they entered a reliable calibration range of three meters. The paper introduced a framework that really highlighted the ability to make smartphones main parts of indoor positioning applications. It should be mentioned that it still relied on additional hardware (BLE beacons) for its main functionality.
In a proposal made by Zou et al. [12] in 2017, the research team presented an Indoor Positioning System (IPS) for navigation and tracking that utilized the inherent sensors of smartphones (Inertial Measurement Units) like accelerometer, gyroscope and magnetometer in order to estimate the distance and direction of users. Based on the Pedestrian Dead Reckoning (PDR) calculation process, the authors employed a fusion approach based on particle filtering. Specifically, iBeacon measurements were utilized to calculate the weight of the particles when the user was in an area with limited Wi-Fi coverage. On the other hand, when the user was in an area with strong Wi-Fi coverage, the weight was determined based on Wi-Fi-based positions. The framework proved to be accurate in terms of user distance and direction tracking. It should be noted that the architecture demanded the need for external hardware (software-modified Wi-Fi infrastructure), other than the users’ smart devices. Furthermore, the proposal aimed to detect users and track their paths in indoor environment, rather than focusing on the implementation of a peer-to-peer positioning model.
A research paper by Yadav et al. [13] in 2019 analyzed the implementation of an IPS by examining iBeacon and Inertial Measurement Unit (IMU) of smart devices, along with the utilization of Fingerprinting. In their map matching algorithm, instead of employing the traditional kNN (k-Nearest Neighbors) approach, the authors opted for Bayesian estimation as a probabilistic approach to identify reference points that are highly probable to represent the precise location. The proposed system integrated BLE beacon and pedestrian dead reckoning positioning (PDR) methods. By incorporating both K-nearest Neighbor and Bayesian estimation approaches in BLE-based positioning, the authors achieved high accuracy in the positioning information. Additionally, the accuracy was further improved through the introduction of a fuzzy logic-based Kalman filter. The approach produced good results in terms of indoor localization data quality. For it to operate, the proposed framework needed an external database as additional hardware.
A notable study was conducted and published by Dinh et al., 2020 [14], introducing an indoor positioning system based on smartphones, using BLE iBeacons and Fingerprinting. It was based on the concept of Pedestrian Dead Reckoning (PDR) [15], on which the system relies on inertial sensing, such as accelerometers and gyroscopes, to estimate the user’s position by tracking their steps and rotations. By integrating these measurements over time, the system calculated the user’s displacement and orientation relative to a starting point, allowing them to navigate without relying on external signals (like GPS). The proposal focused on two main parts. First, the authors presented a novel approach for estimating distances based on Bluetooth Low Energy Received Signal Strengths (BLE-RSS) using a regression model. This regression model is designed to estimate the approximate distance based on the received signal strength indicator (RSSI) values. The model is used to develop a relationship between the RSSI values and the distance from the beacon to the mobile device. Specifically, the model is based on the logarithmic least squares method, where the RSSI value () at a distance is given by the equation:
Here, and are coefficients that are determined through the least squares fitting of the collected RSSI data under both line-of-sight (LOS) and non-line-of-sight (NLOS) conditions. These coefficients are calculated as follows:
In the initial position estimation, after obtaining the approximate distances using the regression model, the system initiates a calibration process where the user is required to stand still for a few seconds. During this time, the BLE signals from the three nearest beacons are collected. Using these signals, the initial position is estimated through a combination of Line Intersection-Based Trilateration and a median filter. The trilateration method involves solving the following system of equations drawn from the distances to the beacons:
where are the coordinates of the beacons and are the estimated distances from the regression model. Simplifying these equations leads to:
where , and . By solving these equations, the initial position is determined. Finally, a median filter is applied to refine this estimate by reducing the effect of outliers. As for the direction information, it is retrieved using the built-in magnetometer data of each mobile device. This data is accessed through the Software Development Kit (SDK) of each device’s operating system (e.g., iOS and Android SDKs), and it allows the determination of the user’s movement direction. Since accurate distance estimation holds importance in indoor geolocation applications, the method employed in the study enabled precise identification of the initialization point. Adding to this process, Dinh’s publication presented an efficient and reliable radio map that leveraged Fingerprint-based positioning to correct the drifted position of Pedestrian Dead Reckoning. Rather than employing high-resolution grids with an extensive number of reference points, this map gathered data from a reduced set of reference points, significantly reducing deployment time. Dinh’s study is a highly sophisticated proposal that aims to address existing issues (with previous implementations), such as efficiency or need for extensive hardware. One minor remark is its dependency on external beacon devices in order to function.
Yet another noteworthy proposal was made by Tuan et al., 2021 [16], where the researchers presented a hybrid tracking framework that combined Pedestrian Dead Reckoning (PDR) with the capabilities of Wi-Fi/iBeacon signals. The proposal was split in three main sectors. Firstly, the authors developed conversion functions to process Wi-Fi/iBeacon signals and transform them into proximity distances. In order to facilitate mobile tracking, the authoring team proposed a placement methodology for iBeacon installation in specific regions, within an indoor environment. Secondly, the team introduced an improved PDR method for mobile smartphones, which utilized Wi-Fi/iBeacon data to estimate a starting point and correct the user’s location along the path created, as the user walks. In the end, the researchers implement the proposed algorithm in an iOS application, highlighting its functionalities. The proposed system is dependent on external Beacon devices. The ability to detect multiple users within the framework was not presented.
Attempts to improve the accuracy of such systems have been made, like the research conducted by Elgui et al., 2020 [17], regarding further improvements to the BLE RSSI values accuracy and quality. Moreover, in an article by Duong et al., 2021 [18], the authors investigated the accuracy of indoor localization systems using Bluetooth Low Energy Received Signal Strength (BLE-RSS) fingerprinting in static scenarios. The research was split in two phases: the first one was the classic ‘offline’ phase, where BLE RSSI data are collected, while the second ‘online’ phase utilized real-time RSSI measurements along with data from the previous one (offline phase) in order to estimate the user’s position. The system’s performance was evaluated in various real-world scenarios to determine optimal values, such as the value of K in the K-nearest Neighbours (KNN) algorithm and the number of required deployed beacons.
2.2. Machine Learning and Ultra Wideband
Another Indoor Localization framework, where Machine and Deep Learning was utilized, was published by Abbas et al., 2019 [19]. The research team introduced an indoor localization system that utilized deep learning techniques to achieve precise and reliable accuracy even in the presence of noise. Their system combined a deep learning model with denoising autoencoders, along with a probabilistic framework to effectively handle noise in the received Wi-Fi signal, aiming to seize the intricate relationship between the Wi-Fi access points (APs) signals received by the smart device and its corresponding location.
Additional research on the potential improvement of indoor localization with the use of Machine Learning techniques has been conducted by Njima et al., 2022 [20], in which the authors also limited their available dataset, utilizing generative adversarial networks (GANs) in order to augment it. The research focused on resolving missing indoor localization data scenarios of different types: available unlabeled data and missing unlabeled data. In both cases, the reliance on limited labelled data proved to be expensive and insufficient for achieving high localization accuracy. To tackle the issue of available unlabeled data, the team proposed a weighted semi-supervised indoor localization approach based on deep neural networks (DNNs). The approach leveraged pseudo-labelling methods, combining real labelled samples with low-cost pseudo-labelled samples, effectively enhancing localization accuracy while reducing the need for collecting additional labelled data. For the extreme scenario of unavailable unlabeled data, they presented an alternative localization system, which generated artificial fingerprints using generative adversarial networks (GANs). Subsequently, a deep neural network was trained on a mixed dataset consisting of both real collected and artificially generated data samples, employing a similar weighting technique with the first scenario in order to improve location prediction quality and prevent overfitting.
Surveys that collect the majority of existing indoor localization scenarios and approaches have also been conducted, like the one by Yang et al., 2021 [21], which focused on aspects like localization accuracy, scalability, stability, reliability and the complexity of various well-known and proposed algorithms, which are compared extensively inside the survey. It also offered a comprehensive viewpoint for comparing existing techniques and practical localization models, with the ultimate goal of enhancing localization accuracy, while minimizing system complexity. Similar surveys have been conducted and published by Zafari et al. [22], Jang et al. [23], Subedi et al. [24] and Mallik et al. [25].
Ultra Wideband (UWB) has also been tested in several implementations for indoor localization. In fact, Apple has utilized this technology in order to establish accurate indoor positioning services between its devices. More specifically, Apple’s U1 chip enables precise distance measurements between devices equipped with it [26]. The main limitation here is that a device needs to house a U series chip in order to be eligible for UWB indoor positioning. Future solutions by Apple and other vendors could focus on addressing this issue. A well-known publication in UWB was made by Porok and Martinoli in 2013 [27]. The researchers presented an Ultra Wideband localization method addressing error behaviors with spatial and multimodal modeling. The approach utilized Tessellated maps and integrated relative positioning in a particle filter framework in order to increase localization accuracy. Experiments with mobile robots (equipped with UWB emitters) demonstrated the method’s effectiveness, achieving precise positioning.
Another widely cited publication in the field of UWB is a survey by Alarifi et al., 2016 [28]. The research team presented the state-of-the-art indoor positioning technologies up to that time, focusing on Ultra WideBand (UWB). It offered a detailed comparative analysis and a strengths, weaknesses, opportunities, threats (SWOT) assessment of UWB, highlighting its strengths and potential in addressing indoor positioning challenges. The study also introduced taxonomies and reviewed recent advances up to that time, recommending further research. More recent publications include a proposal by Mayer et al. in 2023 [29], where the researchers introduced a self-sustaining UWB-based indoor location system for smart mobile sensor nodes. These nodes featured a compact design and long-term operation without frequent battery changes, utilizing an event-driven sensing approach to manage energy use efficiently. The system combined heterogeneous design with embedded processing, reaching high localization accuracy with minimal infrastructure.
Furthermore, a publication by Hapsari et al., 2024 [30], reviewed the development of UWB indoor tag localization technology from 2017 to 2022, focusing on positioning, tracking and navigation. It used SMS (Systematic Mapping Study) and SLR (Systematic Literature Review) methods to analyze trends, issues and research opportunities. The study identified key areas such as machine learning, filtering and sensor fusion, and discussed performance metrics like accuracy, scalability and energy efficiency, all in the context of Ultra Wideband indoor localization. In addition, the paper provided a taxonomy of optimized metrics and highlighted future research opportunities. The paper can be viewed as an update to Alarifi’s survey of 2016.
The diverse range of indoor positioning implementations presented through the outlined research bring several advantages to the adopters. However, limitations like hardware dependencies, infrastructure requirements, environmental constraints and (potentially) energy consumption concerns, highlight the need for additional research in the field of indoor localization. A Transactional Area Network (TAN) could serve as a universal and standard approach, unifying various methodologies and technologies. TAN could be regarded as the foundation where an implementation would be developed upon, introducing new approaches, testing state-of-the-art algorithms and improving the initial goal of decentralized indoor positioning, along with increased data exchange and generation.
3. TAN Conceptualization
3.1. Scope and Characteristics
To enable future indoor localization implementations and frameworks to adopt a universal architecture, the Transactional Area Network should be based on a core concept and a set of main characteristics that define its scope and operation. A potential new indoor positioning implementation would be able to comply to TAN’s logic and thus be categorized as a Transactional Area Network. The scope behind TAN’s proposal has been briefly covered in the introductory section of this article. Firstly, there is a lack of widely adopted indoor localization solutions. Secondly, most existing frameworks do not support a peer-to-peer experience, preventing users from exchanging data and sharing their relative positions with one another. This has resulted in consumers being less familiar with indoor localization applications, compared to GPS location services. Thirdly, these issues contribute to the limited availability of indoor positioning data. Therefore, future application developers should take these considerations into account. TAN’s establishment aims to achieve exactly that.
As outlined in the Introduction section, The term ‘Transactional Area Network’ has not been defined by the global research community. The vocable ‘Transactional’ is selected because indoor localization can provide the basis for entity interaction, mutual influence and data exchange. Indoor positioning relies on the interaction between multiple entities exchanging information, rather than the existence of a singular device or beacon. Since this form of interaction between entities can be viewed as a form of transaction, indoor localization can be safely described as ‘Transactional’. In addition, indoor positioning is also an ‘Area Network’ because it interconnects entities through their devices within a limited area (in this case, indoor locations). Hence, this article adopts the term ‘Transactional Area Network’ to describe its proposal. Taking this information into account, TAN’s definition would be the following: “A Transactional Area Network is a computer network that interconnects devices within indoor locations, aiming to enhance entity interaction, mutual influence and data exchange”.
According to the provided definition, a Transactional Area Network should promote simplified, decentralized indoor positioning operations, enabling end-users to benefit from its capabilities. Each exchange of positioning information or other data between two users is considered a ‘transaction’. Thus, every time a user successfully sends and receives information within the network, a transaction occurs. Each instance of new information exchange counts as a new transaction. The minimization of additional hardware is important, since it will encourage broader adoption of the concept. While TAN can include additional devices (such as Bluetooth beacons—see Figure 1 and Figure 2), the network should primarily consist of users with their personal devices. As the adoption of TAN raises, the data generation will inevitably increase as well. Therefore, TAN must also transmit this data to an external database, located outside the network.
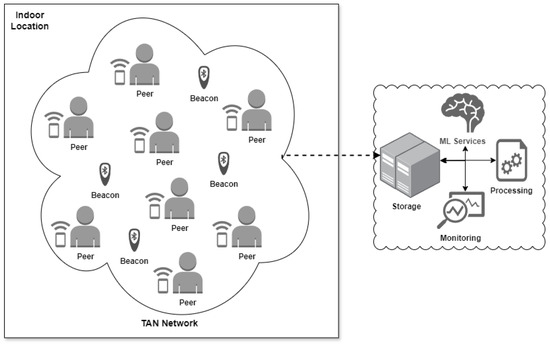
Figure 1.
A high-level overview of the Transactional Area Network (TAN) implementation within an indoor environment.
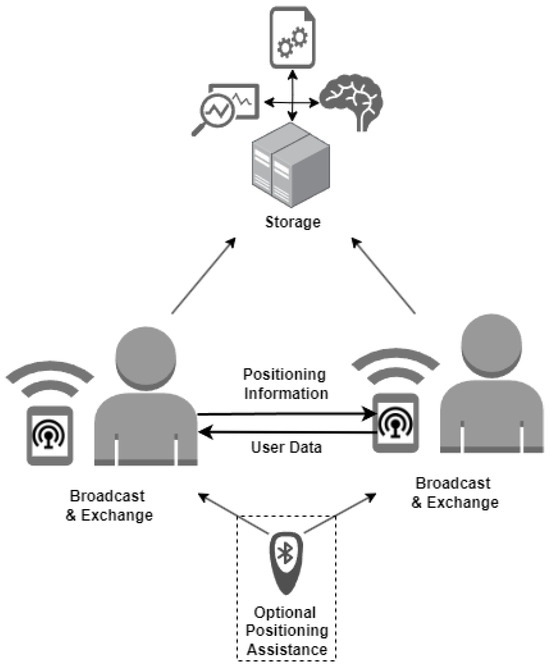
Figure 2.
A focused overview of the user communication in a TAN, showcasing the data-exchange pipelines between two users, and the existence of external hardware for optional assistance.
Figure 1 depicts a conceptual framework illustrating a TAN’s operation, while Figure 2 offers a focused overview of the communication pipelines among users within a TAN. Based on the outlined considerations, the main characteristics of a Transactional Area Network should be the following:
- Peer-to-Peer Design: The network should prioritize the direct exchange of data directly between users, enabling a decentralized approach.
- Minimal Hardware: Maintaining a peer-to-peer design is imperative. Thus, the network should primarily utilize end-users’ personal devices, such as smartphones and smartwatches. The reliance on external hardware, such as Bluetooth beacons, should be minimized, and used only in cases where additional positioning information is important.
- Data Collection: The network should gather positioning data generated by each end-user and transmit it to an external storage solution outside the local network.
- Data Comprehensibility: Indoor positioning data are vital only within the location itself. The collected data should be comprehensible, providing meaningful insights or information.
Delving into the technical aspects of a user’s device operating within the Transactional Area Network, it was essential to first establish the foundational criteria that define TAN’s design. These characteristics pave the way for the more technical specifications of a user’s device within the network, where functionalities such as virtual beacon operation for distance calculation, peer-to-peer session establishment for data transfer, and signal pairing with user identification processes for effective data integration, come into play.
3.2. Technical Details
Given the aforementioned criteria, TAN’s implementation should leverage the personal devices of individual end-users, such as smartphones or smartwatches. The primary objective is to provide consumers with indoor positioning information of themselves and nearby individuals. Thus, TAN should enable users to locate others in real-time, avoiding the necessity for external hardware like Bluetooth beacons or trackers. Each user’s personal device will serve as their dedicated tracker. As already outlined, the use of external hardware should be minimized. However, additional devices, such as beacons, could be supported by a TAN to serve as auxiliary tools that provide users with more information. This could include details about a specific floor within a building or an area within a given indoor environment. Nonetheless, external hardware must only play a supportive role in the establishment of a Transactional Area Network. They are optional, not mandatory. A TAN should primarily rely on users’ devices rather than other equipment, which is essential for maintaining its peer-to-peer nature. Hence, TAN simply requires the installation of a straightforward software solution on users’ devices to participate. Ideally, this solution would be seamlessly integrated into the device’s operating system, similar to built-in GPS location services. Since the device will service as the main hardware of a Transactional Area Network, it is important to examine its technical details.
Main indoor positioning functionalities of a TAN will utilize Bluetooth Low Energy (BLE) and Wi-Fi signals. Regarding BLE, both iOS and Android (the two main operating systems of today’s smart devices) offer solutions for facilitating location-based interactions using Bluetooth Low Energy. Apple’s iBeacon [31] is a framework that enables location-based interactions between devices using Bluetooth Low Energy (BLE) wireless technology, a feature introduced in Bluetooth 4.0. Introduced by Apple as part of the iOS 7 update, it relies on BLE to allow devices to communicate over short distances without excessive battery consumption. On the software side, iBeacon utilizes the Core Location and Core Bluetooth frameworks in iOS devices to detect and respond to beacon signals. Similarly, Android offers Eddystone [32]. Eddystone is an open-source BLE beacon format developed by Google, similar to iBeacon. Eddystone allows for broadcasting beacon signals, and it supports multiple frame types, allowing developers to transmit various types of data, including URLs, telemetry data and more, to nearby devices. Despite Google ending its support in 2018, developers can continue to develop using this protocol. An iOS device can function as a beacon itself [33], similar to how Android devices can utilize Eddystone to create location-based services without the need for additional hardware.
Regarding the utilization of Wi-Fi signals, frameworks for both iOS and Android exist. Multipeer Connectivity [34] is a framework introduced by Apple for iOS and macOS platforms with the release of iOS 7. It allows devices to communicate and share data with each other directly over Wi-Fi or Bluetooth, without requiring an internet connection. It enables peer-to-peer communication and networking between nearby devices, creating ad-hoc networks or mesh networks. The framework allows devices to discover and connect to each other dynamically, forming temporary connections based on the available network infrastructure. Nearby Connections API [35], developed by Google, offers similar peer-to-peer communication functionality for Android devices. It facilitates the discovery of nearby devices and the establishment of connections over Wi-Fi and Bluetooth, enabling real-time data exchange and collaboration between connected devices. Like Multipeer Connectivity, Nearby Connections API simplifies the complexities of device discovery, connection establishment and data exchange. It is also worth mentioning that, up until December of 2023, Google supported Nearby Messages API [36], which also allowed Android devices to discover and communicate with other nearby devices using a combination of BLE and Wi-Fi. Today, Nearby Messages API is deprecated, with all applications being advised to migrate to Nearby Connections API.
A Transactional Area Network should utilize the aforementioned frameworks, each depending on the operating system of a device, in order to broadcast and receive Bluetooth Low Energy and Wi-Fi signals. It should combine their key functionalities in order to transmit both signals (along with additional user information) from one device, to another. Therefore, a TAN’s indoor localization system should consist of (at least) the following key features:
- Virtual Beacon Configuration: Each user’s device should function as a virtual beacon, transmitting the main beacon attributes (UUID, Major/Minor or Instance ID values) through BLE signals. At the same time, it should detect other devices’ attributes and proceed to calculate the distance from them, based on the received signal strength indicator (RSSI) values.
- Peer-to-Peer Session Establishment: Each device should establish an ad-hoc, peer-to-peer communication session (using frameworks such as Multipeer Connectivity or Nearby Connections) in order to enable data transfer across all nearby devices. The communication will be based on Wi-Fi signals (assisted by Bluetooth). An internet connection is not required.
- Signal Pairing and User Identification: Each user within TAN should be able to acquire distance information, as well as additional details (such as names and images) of other users. However, transmitting BLE signals as a virtual Beacon and exchanging data through a Peer-to-Peer session create two separate routes of information. An effective signal pairing and user identification method is essential to ensure that each device in the session properly binds the different incoming signals in order to accurately display the user information.
- External Database Connectivity: Each device should be capable of establishing communication with an external database and transmit all incoming data it receives.
If a software deployed on users’ devices were to comply with all the outlined characteristics, TAN could be implemented within indoor environments, facilitating decentralized distance detection and data exchange among them. (see Figure 3). Each device would be the host of its own Peer-to-Peer communication session. All other devices detected would be considered guest peers to the session, while at the same time they would act as hosts to their own sessions. Consequently, a Transactional Area Network could enable people locate others around them and potentially initiate new interpersonal relationships. If adopted, the network could be tested in several indoor environment applications. It could even prove to be a vital companion for human rescue scenarios, specifically during life-saving operations in catastrophic events.
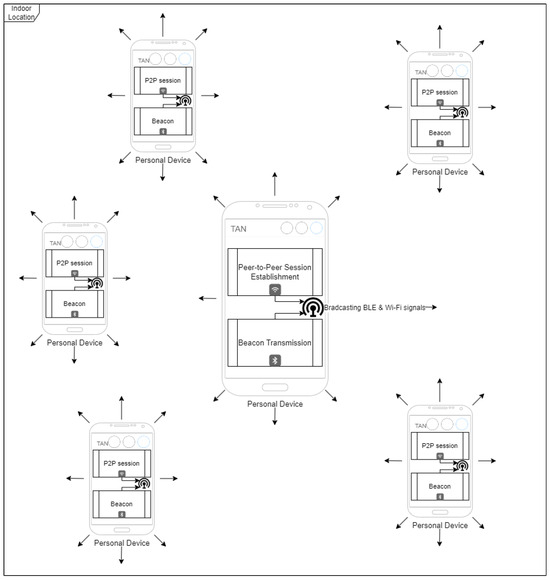
Figure 3.
A Transactional Area Network operates across multiple devices in indoor environments. Each device transmits and receives BLE Beacon signals, and also initiates Peer-to-Peer sessions, by broadcasting and receiving Wi-Fi signals.
3.3. Use Cases
One use case scenario highlighting the practicality of a Transactional Area Network (TAN) is its ability to help users identify their location relative to other entities in a closed environment, such as indoor spaces or nearby facilities. Imagine a network where each user can view others around them and observe their distance in real-time. In addition, users can establish basic communication with nearby entities via messages, and identify them in the area around using TAN’s distance (and—ideally—direction) information. Such a network could potentially enhance interpersonal interactions in indoor locations, such as restaurants, social events, cafeterias and more. Thus, TAN can provide real-time proximity data and communication capabilities, easing social engagement in indoor environments.
Another use case scenario demonstrating the necessity of a Transactional Area Network is its potential to aid professionals, such as firefighters and rescue teams, in saving lives during catastrophic events (e.g., earthquakes or floods). During such emergencies, TAN could enable firefighters and rescuers to approach the debris of collapsed buildings and locate individuals trapped beneath. By using their own devices, rescue workers could receive real-time distance (and ideally directional) information about the survivors’ relative locations, increasing the efficiency and speed of rescue operations. Additionally, the network could potentially facilitate communication between rescuers and survivors, providing vital information about the trapped individuals’ conditions and needs. This capability could also be invaluable in scenarios where traditional communication infrastructures are compromised, offering a decentralized solution for establishing communication between rescuers and survivors, and thereby contributing to life-saving missions effectively.
One additional use case scenario for TAN is monitoring traffic within a company’s premises, such as buildings or offices, to understand the number of employees present each day. Data engineers can extract valuable insights from the collected data, such as identifying patterns in employee behavior, including common lunch and break times. In cases where a company operates multiple locations, the indoor positioning data collected by each device within TAN can be combined with the device’s GPS coordinates. This allows data engineers with access to the TAN database to determine which data samples correspond to which premises. However, additional considerations are necessary, such as distinguishing the specific floor each user is on at any given time. This information can be validated using external hardware, such as beacons placed on each floor. Although TAN’s core principle is a decentralized approach that primarily relies on end-user devices, the minimal use of external beacons is acceptable to enhance accuracy.
These three use case scenarios illustrate the usefulness and practicality of the Transactional Area Network. From enhancing social interactions in indoor environments to aiding in emergency rescue operations and optimizing workplace analytics, TAN could offer an efficient solution for real-time, decentralized data exchange. With primary reliance on users’ personal devices and minimal dependency on external hardware, TAN could improve user experience and operational efficiency across various contexts.
4. Proof-of-Concept Implementation
4.1. Analysis
For a proof-of-concept implementation of the Transactional Area Network, this article’s research and authoring team decided to develop a simple software solution written in Swift programming language. Swift [37] is a modern programming language primarily used for developing applications on Apple platforms such as iOS, macOS and watchOS. It was designed to provide a more intuitive and safer programming experience compared to Objective-C, the language previously used for Apple platform development. The developed software utilized Apple’s iBeacon and Multipeer Connectivity frameworks, facilitating Bluetooth Low Energy (BLE) signal transmission and exchange, along with Wi-Fi peer-to-peer communication sessions.
First comes the virtual Beacon establishment. To begin transforming the device into a new beacon, it will broadcast a UUID along with unique Major and Minor values. These values remain constant throughout the device’s active presence in the network. Initially, a UUID is defined for the device, which remains the same across the session’s lifespan and is common for all devices within the session. To ensure the Major and Minor values are unique for each device, a simple method is employed: each device’s Major and Minor values are assigned a random number between 1 and 500,000. Before broadcasting, the device will scan for surrounding devices and record their Major/Minor values. If it detects a duplicate, new random numbers will be generated for the Major/Minor values until a unique combination is found. Once uniqueness is confirmed, the device will start broadcasting as a beacon and enter the system (see Figure 4). Although the Major value typically differentiates groups of beacons within the same UUID (and therefore could remain the same for small numbers of devices), for this proof-of-concept, both Major and Minor values are designed to be unique for each device.
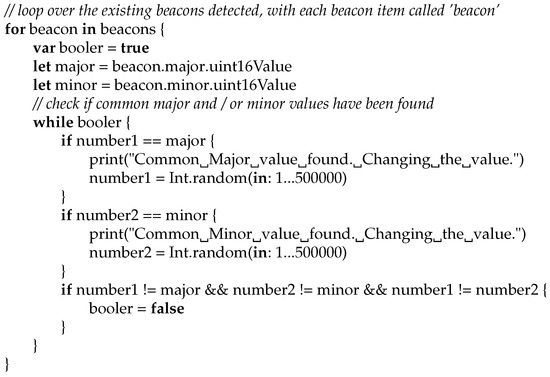
Figure 4.
Swift code snippet that verifies and ensures the uniqueness of Major/Minor values.
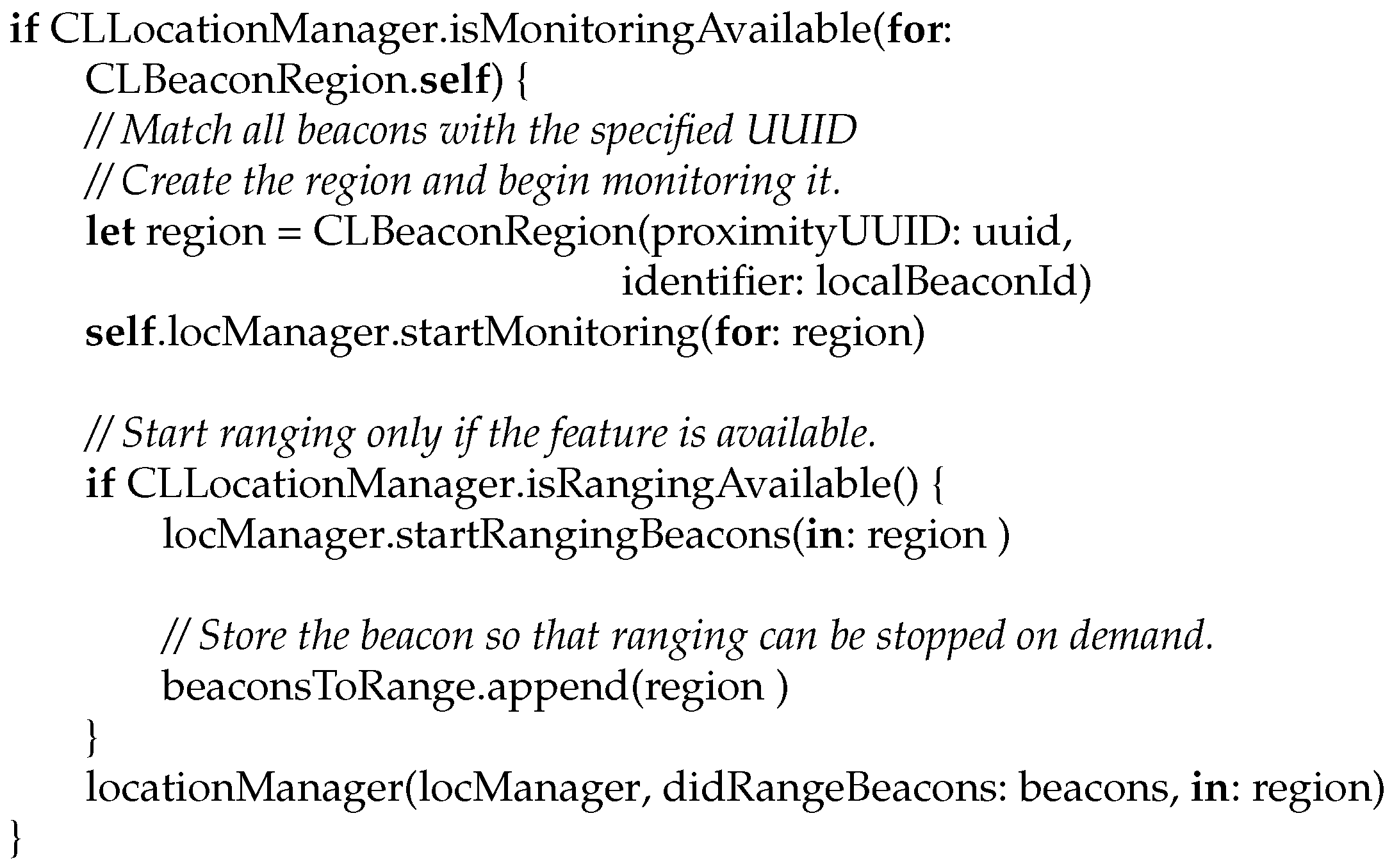
To access the session, the software first verifies if the device has Bluetooth enabled and can monitor signals in its nearby area (see Figure 5). If these conditions are met, the application establishes a beacon region known as ‘CLBeaconRegion’. Within this region, it scans for other devices sharing the same UUID. Subsequently, the ‘ranging’ process begins, at which the software detects and records all transmitting devices acting as beacons, each identified by the same UUID. Simultaneously, the process of calculating the distance between them is achieved. iBeacon calculates distance (referred to as ‘accuracy’) based on the received signal strength indicator (RSSI) from the beacon and the known transmit power (TxPower) of the beacon [38]. The distance estimation is derived using a logarithmic path loss model, which can be expressed by the following equation:
where:
- RSSI This is the measured strength of the signal received from the iBeacon. It is typically reported in decibels relative to one milliwatt (dBm). The RSSI value decreases as the distance between the iBeacon and the receiver increases.
- TxPower (Transmit Power) is a calibrated constant that represents the expected RSSI at a 1-meter distance from the beacon (in dBm). It is specific to each beacon and is typically provided by the manufacturer or determined during the calibration process.
- Path Loss Exponent (n), is a factor that represents the rate at which the signal attenuates as it propagates through the environment. The value of n varies with the physical characteristics of the environment. For example, in free space, n is typically 2, whereas in more obstructed environments, n can be 3 or 4.
For example, if an iBeacon has a TxPower of −59 dBm and the measured RSSI at the receiving device is −70 dBm in an environment where the path loss exponent n is 2, the estimated distance would be calculated as follows:
This logarithmic path loss model provides a relatively accurate approximation of the distance in many indoor environments. The distance information received can be subject to further processing in order to potentially increase the quality of the results, as well as apply triangulation to get directional information.
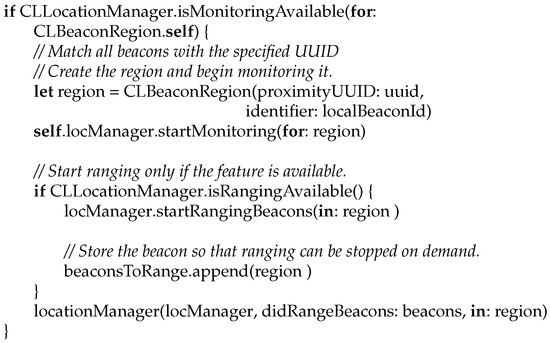
Figure 5.
Swift code snippet that checks the device’s ability to transmit as a beacon.
Figure 5.
Swift code snippet that checks the device’s ability to transmit as a beacon.
The next step is for the device to initiate a peer-to-peer communication session using the Multipeer Connectivity (MC) framework. Once the device successfully starts functioning as a virtual beacon, the software proceeds to group three essential elements needed for establishing an MC session: (i) the device’s Major/Minor value pair as a beacon, (ii) the user’s name credentials and (iii) an image selected by the user. Furthermore, to enable the MC session, additional characteristics are required. One crucial characteristic is a unique identifier for each device, named ‘myPeerId’. This unique MC peerID differentiates each device, preventing data transfer malfunctions and/or loss. On top of that, two more properties are created: one for advertising each device on the network and another for discovering nearby devices. These are named ‘serviceAdvertiser’ (see Figure 6) and ‘serviceBrowser’ (see Figure 7), respectively.

Figure 6.
ServiceAdvertiser receives an invitation to join another peer’s session.
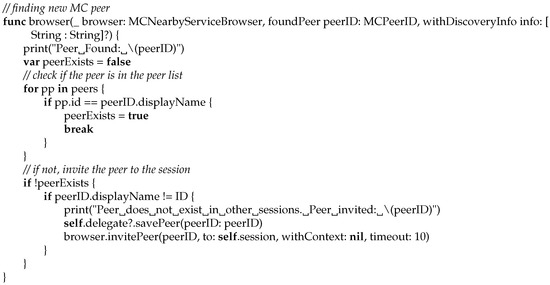
Figure 7.
ServiceBrowser locates a peer and checks if they already exist in the device’s list with known peers.
Through the serviceAdvertiser, each device continuously broadcasts its peer-to-peer session signal and receives invitations from other devices (peers). The serviceBrowser enables each device to discover new peers, send them invitations and notify the software when a peer disconnects from the session. Thus, the serviceAdvertiser and serviceBrowser manage the entry and exit of peers in the session. In the end, the MC session provides seamless data exchange among the connected devices, acting as a peer-to-peer communication channel.
During the Multipeer Connectivity (MC) session, each device is capable of transmitting data to all connected peers. In this proof-of-concept, the data exchanged includes the user’s name and image. When a device sends data through the session, it always accompanies them with the unique peer ID. Thus, any data transmitted in a Multipeer Connectivity session is tagged with the sender’s peer ID. To manage and store information received from other peers, a list named ‘peers’ is utilized. This list contains instances of an object called ‘aPeer’, specifically designed for this proof-of-concept. The ‘aPeer’ object includes four attributes: (i) peer ID, (ii) name, (iii) picture and (iv) distance (the calculated accuracy value) from the current device. Consequently, the ‘peers’ list aggregates all information from surrounding peer devices as distinct objects. For each device, the peer ID, name, picture and distance (relative to the current device) are recorded.
When the software receives information from various peer devices, it first verifies whether the devices are already registered in the list it possesses. If a device is not registered, a new ‘aPeer’ object is created and added to the list, with the received peer ID, name and picture. If a device with the received peer ID is already registered, the existing data is updated with the new information received. A peer object can be instantiated with incomplete attribute information, allowing empty attributes to be populated later within the session’s lifespan. To better understand this process, consider a scenario where a device begins sending information within the peer-to-peer session. At the same time, this process is occurring across all devices in the session. Given the high volume of incoming data, a device’s user name and picture may not arrive simultaneously to another device. If the name arrives first, a peer object is created with the peer ID and name. When the picture arrives later, the application detects that this peer is already registered with only the name and peer ID, and it updates the peer object with the image information.
However, a major task remains: pairing each device’s beacon information, which includes the relative distance from other peers, with the broadcasted peer-to-peer session data, in this case the name and image of each user. The two signals—BLE and MC—are different. How can these signals be matched? A solution is needed to enable the software to detect and associate the different BLE and MC signals, hence identifying them as originating from the same device. The pairing and identification process is as follows (as illustrated in Figure 8): for each device, only the Major and Minor values from the BLE signal can be obtained as unique identifiers. These values are combined into a string element, separated by a slash punctuation mark (‘/’). For example, if a device’s Major and Minor values are ‘172’ and ‘8376’ respectively, the new element’s value will be ‘172/8376’. This element is then assigned to the ‘myPeerId’ attribute of each device.
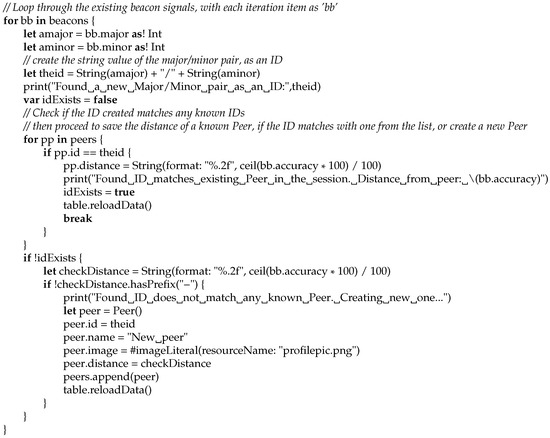
Figure 8.
The Major/Minor pairing process, and examining for matches in the known Peers list.
As a result, the device will broadcast as a beacon with Major/Minor values of ‘172/8376’, while also operating as a peer in the peer-to-peer communication environment with the ID ‘172/8376’. When the software detects a BLE signal from a virtual beacon device and simultaneously receives data from an MC peer, it combines the Major/Minor values of the beacon signal into a string variable, separated by a slash punctuation mark (‘/’). Thus, the BLE Major/Minor values ‘172’ and ‘8376’ will again form ‘172/8376’ on the receiving end. The software then compares this new string variable from the BLE signal with the received ID of the MC peer. If they match, it confirms that both signals originate from the same device. If not, the software continues to compare the signals until all are correctly paired.
With this simple and effective solution, beacon signals are successfully merged with peer-to-peer session data. Each device can identify which signals originate from the same device, enabling the software to determine their relative distance (based on the BLE signal). Consequently, all peer objects in the device’s list will be populated with their distance attributes. This integration of BLE signals and peer-to-peer data ensures that each device correctly associates signals from a specific user. This leads to a successful proof-of-concept demonstration of the Transactional Area Network (TAN), showcasing its decentralized nature.
As seen in Figure 9, TAN’s proof-of-concept software is more than just a combination of two technologies. The proposed framework leverages iBeacon and Multipeer Connectivity to utilize their signals, establishing its own software solution. For Android, these technologies would be Eddystone and Nearby Connections, respectively. TAN’s software modifies the information sent through each signal (BLE RSSI and MC), transmits both via the CLBeaconRegion and MCServiceAdvertiser modules and simultaneously awaits incoming signals using the CLBeaconRegion (again) and MCServiceBrowser modules. It then fuses the received information in the BLE and MC Signal Pairing module to identify potential common senders and create iBeacon/MC signal pairs. When a match is identified, the software stores the data from the identified peer in a peer list, successfully initiating a connection between the sender and the receiver. This process not only enhances the accuracy of signal pairing but also improves the robustness of the connection. In the end, this integration enables seamless communication, along with data exchange and generation within the decentralized framework of the Transactional Area Network (TAN).
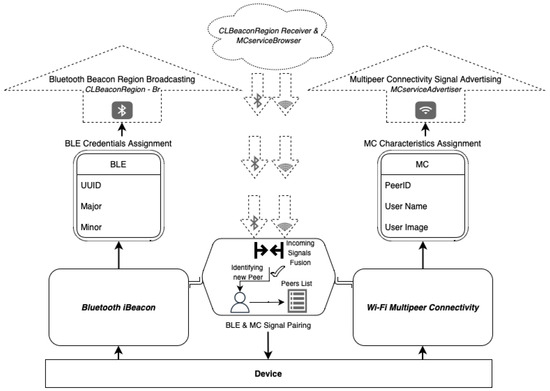
Figure 9.
TAN prototype software’s internal components’ architecture.
In the context of data transmission, it is crucial to ensure that the data collected by each device is properly structured before being sent to an external database. The resulting dataset, based on the peers list, is carefully organized into JSON objects, contributing to seamless storage and subsequent analysis. Each JSON object is crafted to include essential details such as a timestamp, the BLE UUID, major and minor values of each device, and the device’s ‘peerID’, formed by combining its major and minor values. Since all available information about each peer is contained within the peers list of the device, this list is transformed into a JSON array, where each object represents an individual peer. Consequently, each object consists of the peer’s ID (a combination of its BLE major/minor values), name, base64-encoded image and the calculated distance using the BLE signal (Figure 10). Given the frequency of distance measurements occurring every second, it is important to establish an optimal transmission interval to the database. This interval must balance the necessity for real-time updates with the efficiency of data handling. Therefore, an appropriate transmission interval typically ranges from every few seconds to every minute, depending on the scale of each TAN.

Figure 10.
A data sample from the TAN’s proof-of-concept software.
4.2. Testing and Results
4.2.1. Testing Scenario 1: Living Room
TAN’s proof-of-concept software has been tested on four iOS devices: an iPhone X, an iPhone 8, an iPhone SE (2016) and an iPad Pro 10.5 (2017). The first testing scenario aimed to determine the distance between devices forming a Transactional Area Network within an apartment’s living room. When each user enters their information into their device, the software initiates the previously outlined procedure. It starts by broadcasting a Bluetooth Low Energy (BLE) signal, functioning as a virtual beacon, and establishes a new peer-to-peer session using Multipeer Connectivity (MC). On the BLE side, the signal searches for beacons in the area with the same UUID. Simultaneously, in the MC phase, the device creates a serviceAdvertiser, a serviceBrowser, and a session that continuously searches for new peers and any data they may send.
In Figure 11, the moment when two users enter TAN for the first time is depicted. The distance between user ‘Daniel Adams’ (whose device’s screen is captured in Figure 11) and user ‘David Jones’ is less than one meter, indicating close proximity. The BLE signal calculation in this instance is quite accurate. Measurements taken with a physical measuring instrument indicated a distance of approximately 95 cm between the two devices, resulting in a deviation of about five centimeters. Subsequently, David Jones moved closer to Daniel Adams. The application running on David Jones’s device recorded this change, as shown in Figure 12.
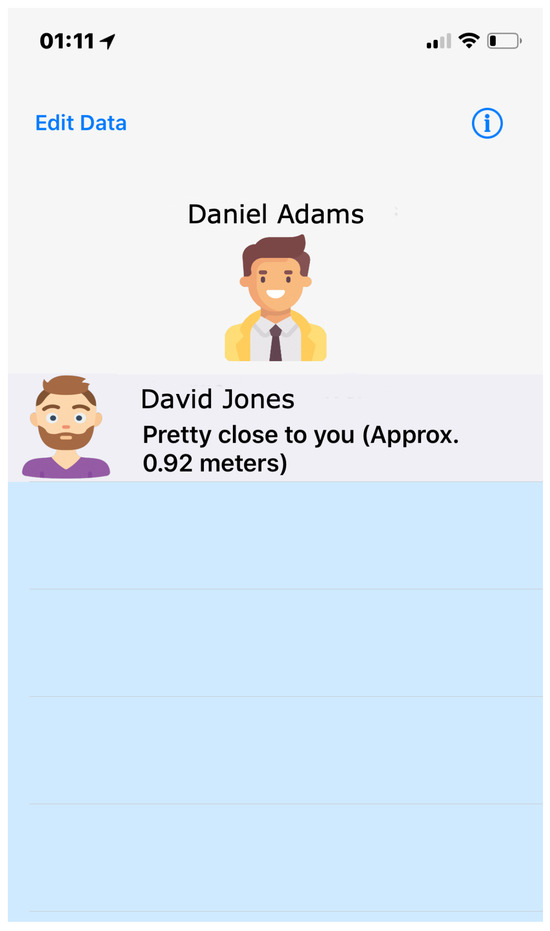
Figure 11.
Establishment of TAN between two peers, as seen from Daniel Adams’ device (iPhone X).
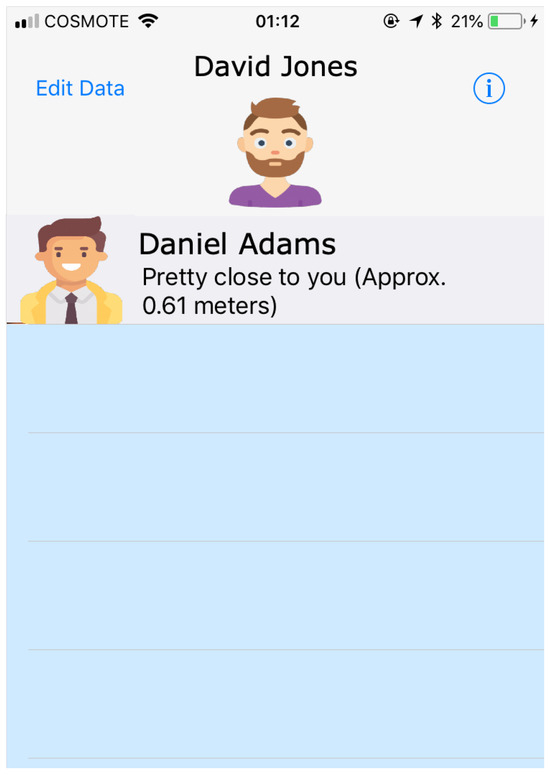
Figure 12.
David Jones’s device (iPhone 8) showing the distance between him and Daniel Adams.
In Figure 12, the user David Jones perceives the user Daniel Adams at a distance of 61 cm. According to the measurements taken, the deviation was three centimeters, with the actual distance being 64 cm. At this point, another user enters the system. Sitting close to Daniel Adams and David Jones is Alex Lopez, who is using an iPad tablet. He wishes to join the decentralized TAN to detect other nearby users. The result is shown in Figure 13.
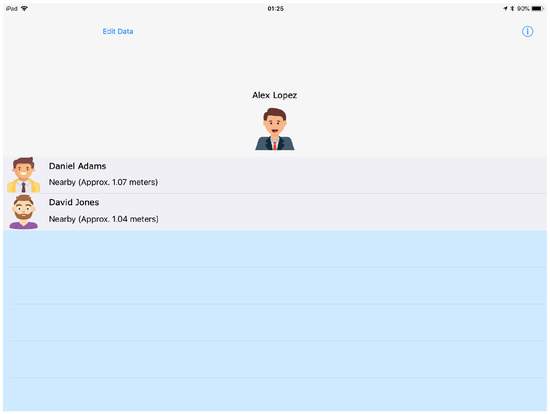
Figure 13.
Alex Lopez with his device (iPad Pro 10.5 2017) entering TAN.
In this figure, the information displayed on Alex Lopez’s device is shown. Alex appears to be approximately one meter away from both Daniel Adams and David Jones. It should be noted that Daniel and David are not seated next to each other. Enabling direction information for each user in a Transactional Area Network is important for enhancing the user experience and improving data generation. According to actual measurements, the distance of Alex Lopez from Daniel Adams and David Jones had a deviation of 8 to 10 cm from the system’s calculated value (the software calculated a shorter distance than the actual one), indicating that Daniel and David were actually seated slightly further away from Alex.
At this stage, David Jones decides to move further away from the other two users within the system. The outcome is displayed on his device’s screen, in Figure 14:
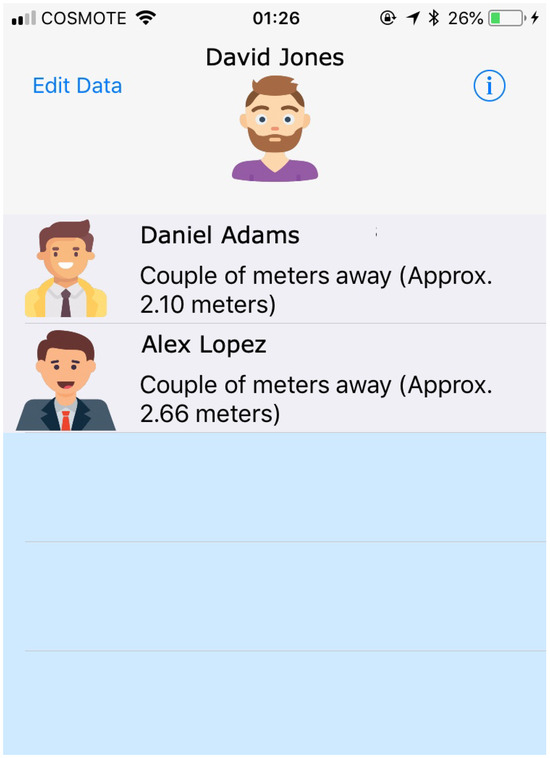
Figure 14.
David Jones’s new distance from the users, as shown in his device’s screen.
From David’s device, Daniel appears to be 2.1 m away, while Alex is measured at 2.66 m. However, upon actual measurement, the BLE signal’s distance calculation shows a deviation of approximately 15 cm. Consequently, the real distance between David and Daniel is 2.25 m, while David and Alex are approximately 2.8 m apart. This initial testing scenario, conducted in an apartment’s living room as previously mentioned, revealed that the proof-of-concept software calculates the beacon signal’s distance quite accurately. As expected, as the distance between devices increases, so does the deviation. Nonetheless, these deviations remain relatively low, indicating a good level of precision in BLE signal measurements, especially at close distances. Furthermore, data (users’ names and images) are seamlessly transferred via the peer-to-peer communication session with minimal to no delays.
4.2.2. Testing Scenario 2: Cafeteria
The second phase of testing the proof-of-concept software for TAN took place in a public cafeteria. Similar to the initial test case, user Daniel Adams initiates the process on his iPhone X to detect nearby users. Upon entering the system, Daniel identifies two nearby devices/users already transmitting signals as virtual iBeacons and MC peers, therefore having a TAN established. Specifically, one user named John Doe is using an iPad, while another user named Catherine Smith is in the network with her iPhone SE (2016). Both users’ information (names and images), along with the distance between them and Daniel, is displayed on Daniel’s screen, as depicted in Figure 15.
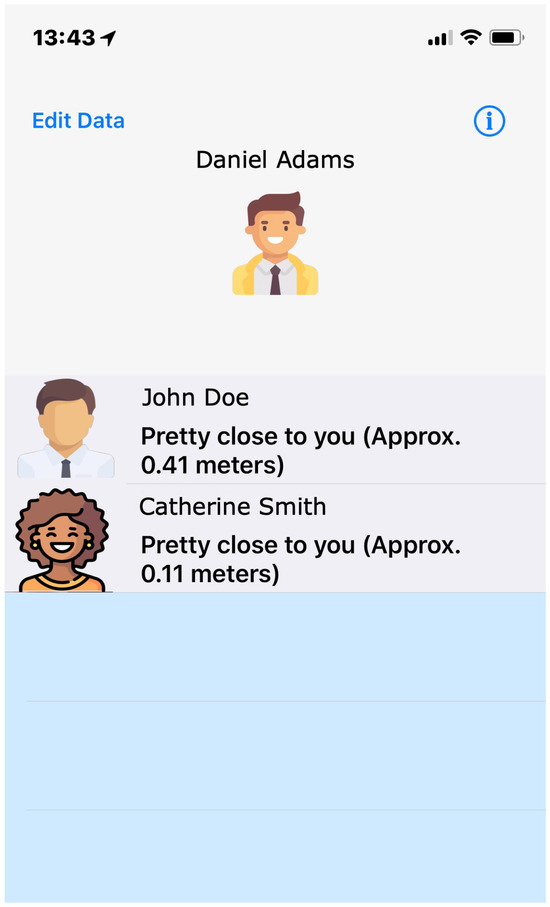
Figure 15.
Daniel Adams enters TAN through his iPhone X, viewing two peers nearby, John Doe and Catherine Smith.
Daniel observes that Catherine is only 11 cm away from him, while John Doe is approximately 41 cm away. Actual measurements showed a deviation of 2 cm to Catherine (actual distance of 13 cm) and 6 cm to John Doe (actual distance approximately 47 cm) from Daniel’s device. Shortly after, Daniel decides to make a phone call and exits the cafeteria. Simultaneously, Catherine moves towards the bar, located further inside the café, to order a beverage. Daniel’s device now displays updated distance data, as shown in Figure 16.
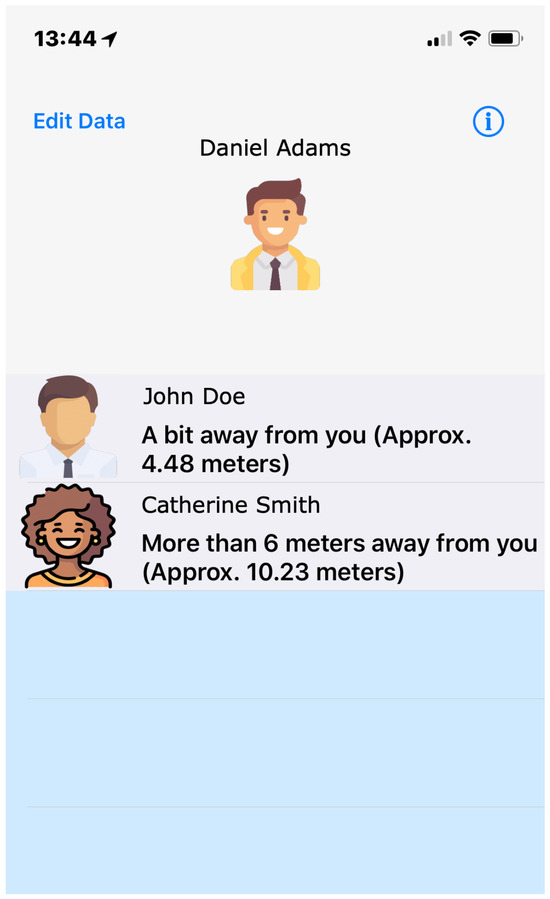
Figure 16.
Daniel Adams’s new distance from users John Doe and Catherine Smith.
In this case, (Figure 16), Daniel is 4.48 m away from John Doe and 10.23 m away from Catherine. In the actual measurements that took place, the deviations from the values calculated by the software are larger. Daniel is approximately 3.9 m away from John Doe (deviation of approx. 55 cm) and 9.1 m away from Katerina (deviation of 1.1 m). Despite the relatively large deviations, the calculation of BLE signal’s distance by the software could still be considered reliable for the case of longer distances. Although it cannot be considered as an objective scientific acceptance factor, it should be noted that the human eye faces difficulty in distinguishing a one-meter difference between distances of 9–10 m. However, minimizing the actual distance error is something that could be further analysed. Additionally, it is worth reminding that, when a user gets closer to another given user inside the session, whose distance was relatively large at some point, the deviation in the actual distance will decrease. In summary, the levels of deviation are not that significant in order to deem the beacon’s distance calculation unreliable.
In this instance (Figure 16), Daniel registers a distance of 4.48 m from John Doe and 10.23 m from Catherine. However, actual measurements reveal larger deviations from the values calculated by the software. Daniel’s distance from John Doe is approximately 3.9 m (a deviation of approximately 55 cm), and from Catherine is 9.1 m (a deviation of 1.1 m). Despite these relatively large deviations, the software’s calculation of BLE signal distance could still be considered reliable for longer distances. It is important to note that the human eye may struggle to distinguish a one-meter difference between distances of 9–10 m. However, minimizing the actual distance error should require further analysis. Moreover, as a user approaches another within the session, whose distance was initially large, the deviation in the actual distance will decrease. In summary, the observed deviations are not significant enough to deem the beacon’s distance calculation unreliable.
As the second user case scenario nears completion, Daniel and Catherine return to their seats. They both sit in the same positions they sat before. John checks his device’s screen to verify if the distances remain at the same levels as before. Daniel should be approximately 40 cm away, with Catherine seated between them at a distance ranging from 10 to 20 cm. The measurements displayed on John’s screen are depicted in Figure 17.
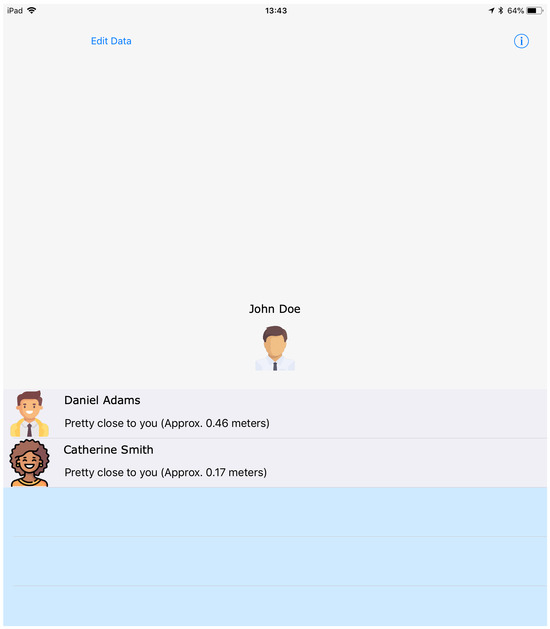
Figure 17.
John Doe takes one final look at his iPad’s screen, observing the distance between himself and users Daniel Adams and Catherine Smith.
The distance between John Doe and Daniel Adams appears to be 0.46 cm, while John’s distance from Catherine Smith measures at 0.17 cm. Upon actual measurements, one observes a similar deviation as before. John is actually 0.51 cm away from Daniel (a deviation of about 5 cm) and 0.19 cm away from Catherine (a deviation of two centimeters). As previously mentioned, BLE signal distance calculation proves relatively accurate at short distances. However, its accuracy diminishes with increasing distance, affecting the software’s calculations accordingly. Nonetheless, the Multipeer Connectivity session operates smoothly, with each device taking approximately 6 to 7 s (at worst) to receive both names and images of the other peers/users. It is worth noting that both testing scenarios have been repeated three times, yielding consistent results each time, with a deviation of ±3 cm for smaller distances and ±10 to ±20 cm for greater ones.
5. Conclusions
The concept of a ‘Transactional Area Network’ (TAN) introduces a promising model in the domain of computer science, particularly in the context of area networks. According to the definition provided for it, this network interconnects personal devices in a decentralized manner, aiming to enhance entity interaction, mutual influence and data exchange. Such a network could serve as a foundation for future indoor localization technologies. A TAN-based indoor positioning framework, as outlined in its concept analysis, can be developed without the need for external hardware (beacon trackers), digital mapping or specialized indoor environment studies. The proof-of-concept software demonstrated the network’s capability to locate smart devices within an indoor setting, calculate the distance between them using their BLE beacon signals and enable data exchange via peer-to-peer communication sessions. The core characteristics and principles of TAN could promote broader adoption of indoor localization applications, offering practical benefits to end-users by enabling them to locate others and exchange data seamlessly.
However, enhancing the robustness of TAN requires careful consideration of several factors. While numerous implementations have been proposed to improve indoor positioning accuracy, their integration into a TAN implementation must be carefully evaluated. Employing machine learning solutions, increasing the use of device’s internal sensors or applying filtering techniques could improve distance approximation accuracy throughout the network. Yet, these options may also raise concerns about energy consumption, which could discourage end-users from adopting the technology. A software that enables TAN capabilities needs to be highly efficient to ensure that users do not minimize their use due to high energy demands. Additionally, frameworks built on the TAN design must be developed with energy efficiency in mind to prevent excessive consumption that could limit the duration of user participation in the network.
Nonetheless, the accuracy of distance calculations within TAN requires further research and improvement, particularly at longer ranges where deviations from actual distances tend to increase. The existing research detailed in this article offers valuable information that can assist in addressing this issue. Considering the impact to energy consumption, a model of Extended Kalman Filtering could be applied to the BLE RSSI signals, accompanied by a layer of Outlier Detection. Moreover, providing users with information about the direction of each peer within the network is very important. Knowing both the direction and distance to nearby peers significantly enhances a user’s understanding of their spatial positioning relative to others. These improvements could become part of future TAN proof-of-concept software’s main structure, as seen in Figure 18.
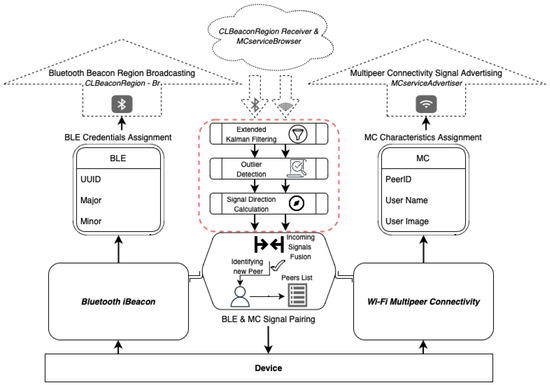
Figure 18.
Proposed improvement in TAN software’s internal components Architecture, highlighting the addition of Kalman filtering and outlier detection methods, along with a signal direction calculation process.
In fact, future research around the concept of a Transactional Area Network (TAN) should primarily focus on the detailed analysis of algorithms, accuracy and efficiency aspects. It should explore how potential constraints of TAN, such as the impact of walls and other physical barriers on signal propagation, can affect localization accuracy and cause geometric distortions. Additionally, the examination of distance measurement error rates, standard deviation and root mean square error should be considered, drawing on the research by Dalkılıç et al. [38] on BLE signal accuracy. The improvements proposed in Figure 18 should involve a combination of algorithmic analysis based on the proposals of Dalkılıç and Dinh et al. [14]. These efforts could validate the theoretical advancements proposed in this article and ensure robust practical applications of TANs.
Regarding the software’s implementation in Swift, one minor issue is the limit of peers each Multipeer Connectivity session can accept (value ‘maximumNumberOfPeers’). This limit is pre-set by Apple to 8 peers per session [39]. However, the issue can be tackled by creating a list with multiple MC sessions of 5 peers each, keeping the energy consumption and the need for resources low. Peers would be designated to act as intermediaries or bridges between different sessions. These intermediary peers will receive data from one session and relay it to another, effectively linking the sessions together.
Last but not least, it is crucial to propose an efficient data management solution for optimally retrieving and handling the indoor positioning data transmitted by each device within a TAN. To enrich the dataset further, each device should also transmit its GPS coordinates, providing additional context for data engineers analyzing the information. An article published in 2023 [40], authored by some members of the current research team, introduced a framework capable of managing large data streams in near real-time scenarios, which is ideal for integration with a Transactional Area Network. The framework has been tested with location data provided by a telecommunications service provider, which exhibit characteristics similar to those generated by TAN’s proof-of-concept software. Initially conceptualized and described in a 2022 publication by the same team [41], this framework stands out as a solid option for managing and storing TAN data.
Finally, the implementation of a Transactional Area Network (TAN) has the potential to improve indoor positioning systems, providing end-users with new services and simplifying the technology for widespread adoption. The emphasis on peer-to-peer design promotes direct communication between them, aiming for a decentralized network that can be both efficient and scalable. Furthermore, reducing external device usage promotes accessibility and affordability, while consistent data collection and comprehensibility measures ensure the data reusability exploitation. The continuous development and adoption of TANs have the potential to improve indoor positioning for consumers and expand applications across various industries, enriching the way people interact with indoor environments. Furthermore, in emergency scenarios, such as catastrophic events, TANs could provide life-saving solutions by aiding rescuers in locating survivors. Ultimately, the Transactional Area Network could redefine the foundation for future indoor positioning applications, and thus leverage indoor localization data.
Author Contributions
Conceptualization, A.N.; methodology, A.N.; software, A.N.; validation, A.N. and A.P.; formal analysis, A.N. and A.L.; investigation, A.N.; writing—original draft preparation, A.N.; writing—review and editing, A.N., A.P. and A.L.; visualization, A.N.; supervision, T.V.; project administration, A.N., A.P., A.L. and T.V. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The datasets presented in this article are not readily available because they are part of an ongoing study. Requests to access the datasets should be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- All You Need to Know about Location Data. Quadrant. Available online: https://www.quadrant.io/resources/location-data (accessed on 21 May 2024).
- Huh, J.-H.; Seo, K. An Indoor Location-Based Control System Using Bluetooth Beacons for IoT Systems. Sensors 2017, 17, 2917. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-based indoor localization with Bluetooth low energy beacons. Sensors 2016, 16, 596. [Google Scholar] [CrossRef] [PubMed]
- Faragher, R.; Harle, R. Location Fingerprinting With Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Legay, P.H.; Roullet, G. LION and MAX, the experiences of two ESPRIT Projects on High-Speed MANs. In High-Capacity Local and Metropolitan Area Networks: Architecture and Performance Issues; Springer: Berlin/Heidelberg, Germany, 1991. [Google Scholar] [CrossRef]
- Jordan, R.; Abdallah, C.T. Wireless communications and networking: An overview. IEEE Antennas Propag. Mag. 2002, 44, 185–193. [Google Scholar] [CrossRef]
- Crisp, J.; Elliott, B. LANs and Topology; Newnes: Oxford, UK, 2005; pp. 212–219. [Google Scholar] [CrossRef]
- Heiberger, R.M.; Neuwirth, E.; Heiberger, R.M.; Neuwirth, E. Polynomial regression. In R through Excel: A Spreadsheet Interface for Statistics, Data Analysis, and Graphics; Springer: New York, NY, USA, 2009; pp. 269–284. [Google Scholar]
- Lemic, F.; Handziski, V.; Aernouts, M.; Janssen, T.; Berkvens, R.; Wolisz, A.; Famaey, J. Regression-based estimation of individual errors in fingerprinting localization. IEEE Access 2019, 7, 33652–33664. [Google Scholar] [CrossRef]
- Ribeiro, M.I. Kalman and Extended Kalman Filters: Concept, Derivation and Properties. Inst. Syst. Robot. 2004, 43, 3736–3741. [Google Scholar]
- Chen, Z.; Zhu, Q.; Soh, Y.C. Smartphone inertial sensor-based indoor localization and tracking with iBeacon corrections. IEEE Trans. Ind. Inform. 2016, 12, 1540–1549. [Google Scholar] [CrossRef]
- Zou, H.; Chen, Z.; Jiang, H.; Xie, L.; Spanos, C. Accurate indoor localization and tracking using mobile phone inertial sensors, WiFi and iBeacon. In Proceedings of the IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Kauai, HI, USA, 28–30 March 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Yadav, R.K.; Bhattarai, B.; Gang, H.-S.; Pyun, J.-Y. Trusted K Nearest Bayesian Estimation for Indoor Positioning System. IEEE Access 2019, 7, 51484–51498. [Google Scholar] [CrossRef]
- Dinh, T.-M.T.; Duong, N.-S.; Sandrasegaran, K. Smartphone-Based Indoor Positioning Using BLE iBeacon and Reliable Lightweight Fingerprint Map. IEEE Sens. J. 2020, 20, 10283–10294. [Google Scholar] [CrossRef]
- Pratama, A.R.; Hidayat, R. Smartphone-based pedestrian dead reckoning as an indoor positioning system. In Proceedings of the 2012 International Conference on System Engineering and Technology (ICSET), Bandung, Indonesia, 11–12 September 2012. [Google Scholar]
- Vy, T.D.; Nguyen, T.L.; Shin, Y. A precise tracking algorithm using PDR and Wi-Fi/iBeacon corrections for smartphones. IEEE Access 2021, 9, 49522–49536. [Google Scholar] [CrossRef]
- Elgui, K.; Bianchi, P.; Portier, F.; Isson, O. Learning methods for RSSI-based geolocation: A comparative study. Pervasive Mob. Comput. 2020, 67, 101199. [Google Scholar] [CrossRef]
- Duong, N.-S.; Dinh, T.-M. On the accuracy of iBeacon-based Indoor Positioning System in the iOS platform. In Proceedings of the 2021 18th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 22–25 March 2021; pp. 58–62. [Google Scholar] [CrossRef]
- Abbas, M.; Elhamshary, M.; Rizk, H.; Torki, M.; Youssef, M. WiDeep: WiFi-based Accurate and Robust Indoor Localization System using Deep Learning. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications, PerCom, Kyoto, Japan, 11–15 March 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Njima, W.; Bazzi, A.; Chafii, M. DNN-Based Indoor Localization Under Limited Dataset Using GANs and Semi-Supervised Learning. IEEE Access 2022, 10, 69896–69909. [Google Scholar] [CrossRef]
- Yang, T.; Cabani, A.; Chafouk, H. A Survey of Recent Indoor Localization Scenarios and Methodologies. Sensors 2021, 21, 8086. [Google Scholar] [CrossRef] [PubMed]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Jang, B.; Kim, H. Indoor Positioning Technologies Without Offline Fingerprinting Map: A Survey. IEEE Commun. Surv. Tutor. 2019, 21, 508–525. [Google Scholar] [CrossRef]
- Subedi, S.; Pyun, J.-Y. A Survey of Smartphone-Based Indoor Positioning System Using RF-Based Wireless Technologies. Sensors 2020, 20, 7230. [Google Scholar] [CrossRef] [PubMed]
- Mallik, M.; Panja, A.; Chowdhury, C. Paving the way with machine learning for seamless indoor–Outdoor positioning: A survey. Inf. Fusion 2023, 94, 126–151. [Google Scholar] [CrossRef]
- Tech Insights. Apple U1 Ultra Wideband (UWB) Chip Analysis. Available online: https://www.techinsights.com/blog/apple-u1-tmka75-ultra-wideband-uwb-chip-analysis (accessed on 21 May 2024).
- Prorok, A.; Martinoli, A. Accurate indoor localization with ultra-wideband using spatial models and collaboration. Int. J. Robot. Res. 2014, 33, 547–568. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Mayer, P.; Magno, M.; Benini, L. Self-Sustaining Ultrawideband Positioning System for Event-Driven Indoor Localization. IEEE Internet Things J. 2024, 11, 1272–1284. [Google Scholar] [CrossRef]
- Hapsari, G.I.; Munadi, R.; Erfianto, B.; Irawati, I.D. Future Research and Trends in Ultra-Wideband Indoor Tag Localization. IEEE Access 2024. [Google Scholar] [CrossRef]
- Apple Inc. Apple iBeacon. Available online: https://developer.apple.com/ibeacon/ (accessed on 21 May 2024).
- Google. Eddystone Beacon API. Available online: https://github.com/google/eddystone (accessed on 21 May 2024).
- Apple Inc. Turning an iOS Device into an iBeacon Device. Available online: https://developer.apple.com/documentation/corelocation/turning_an_ios_device_into_an_ibeacon_device (accessed on 21 May 2024).
- Apple Inc. Multipeer Connectivity: Support Peer-to-Peer Connectivity and the Discovery of Nearby Devices. Available online: https://developer.apple.com/documentation/multipeerconnectivity (accessed on 21 May 2024).
- Google. Nearby Connections API. Available online: https://developers.google.com/nearby/connections/overview (accessed on 21 May 2024).
- Google. Nearby Messages API. Available online: https://developers.google.com/nearby/messages/overview (accessed on 21 May 2024).
- Apple Inc. Swift Programming Language. Available online: https://developer.apple.com/swift/ (accessed on 21 May 2024).
- Dalkılıç, F.; Çabuk, U.C.; Arıkan, E.; Gürkan, A. An analysis of the positioning accuracy of iBeacon technology in indoor environments. In Proceedings of the 2017 International Conference on Computer Science and Engineering (UBMK), Antalya, Turkey, 5–8 October 2017; pp. 549–553. [Google Scholar] [CrossRef]
- Apple Inc. Multipeer Connectivity: Maximum Number of Peers. Available online: https://developer.apple.com/documentation/multipeerconnectivity/mcbrowserviewcontroller/1406954-maximumnumberofpeers (accessed on 21 May 2024).
- Nikolakopoulos, A.; Julian Segui, M.; Pellicer, A.B.; Kefalogiannis, M.; Gizelis, C.-A.; Marinakis, A.; Nestorakis, K.; Varvarigou, T. BigDaM: Efficient Big Data Management and Interoperability Middleware for Seaports as Critical Infrastructures. Computers 2023, 12, 218. [Google Scholar] [CrossRef]
- Karypiadis, E.; Nikolakopoulos, A.; Marinakis, A.; Moulos, V.; Varvarigou, T. SCAL-E: An Auto Scaling Agent for Optimum Big Data Load Balancing in Kubernetes Environments. In Proceedings of the 2022 International Conference on Computer, Information and Telecommunication Systems (CITS), Piraeus, Greece, 13–15 July 2022; pp. 1–5. [Google Scholar] [CrossRef]
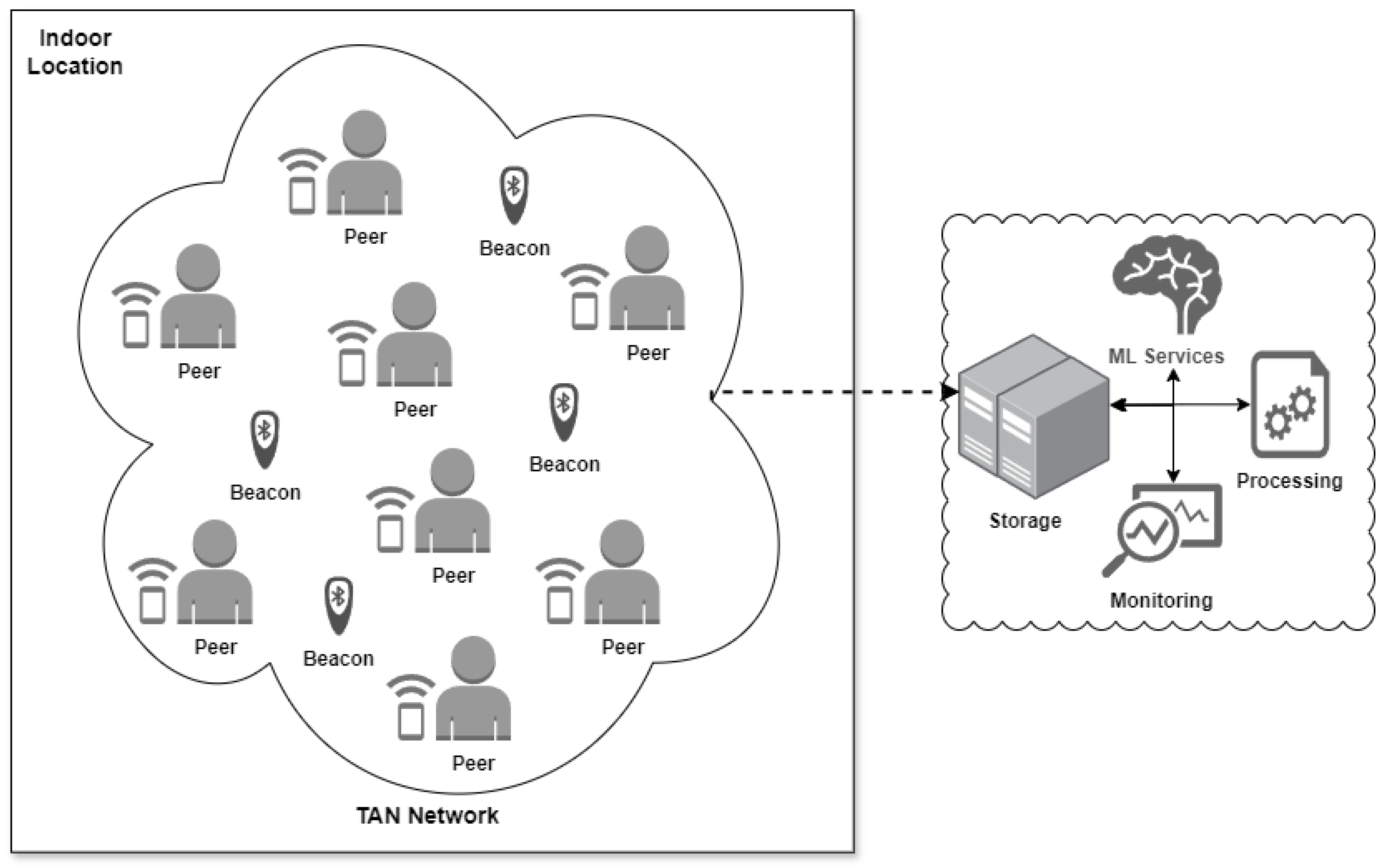
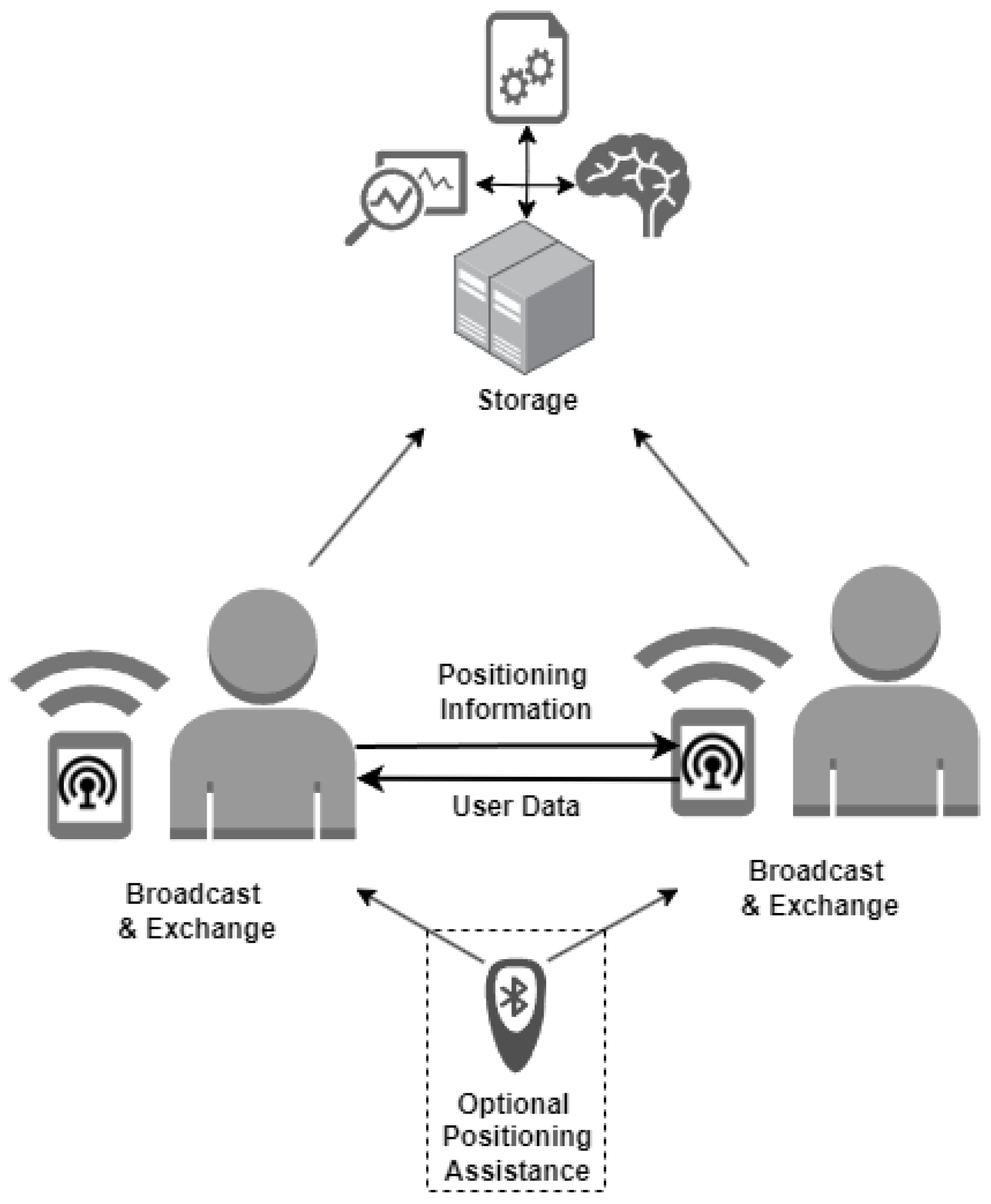
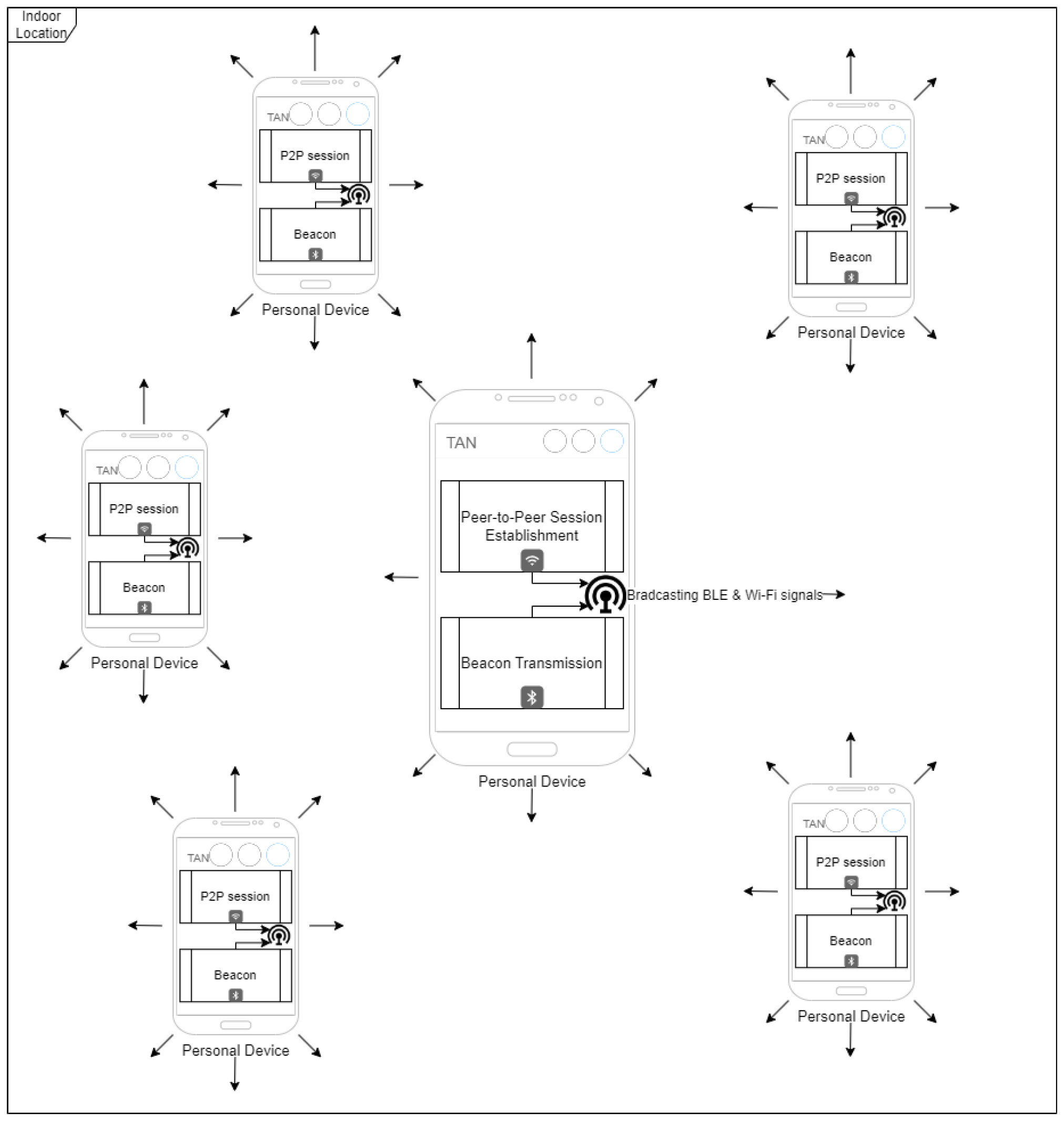
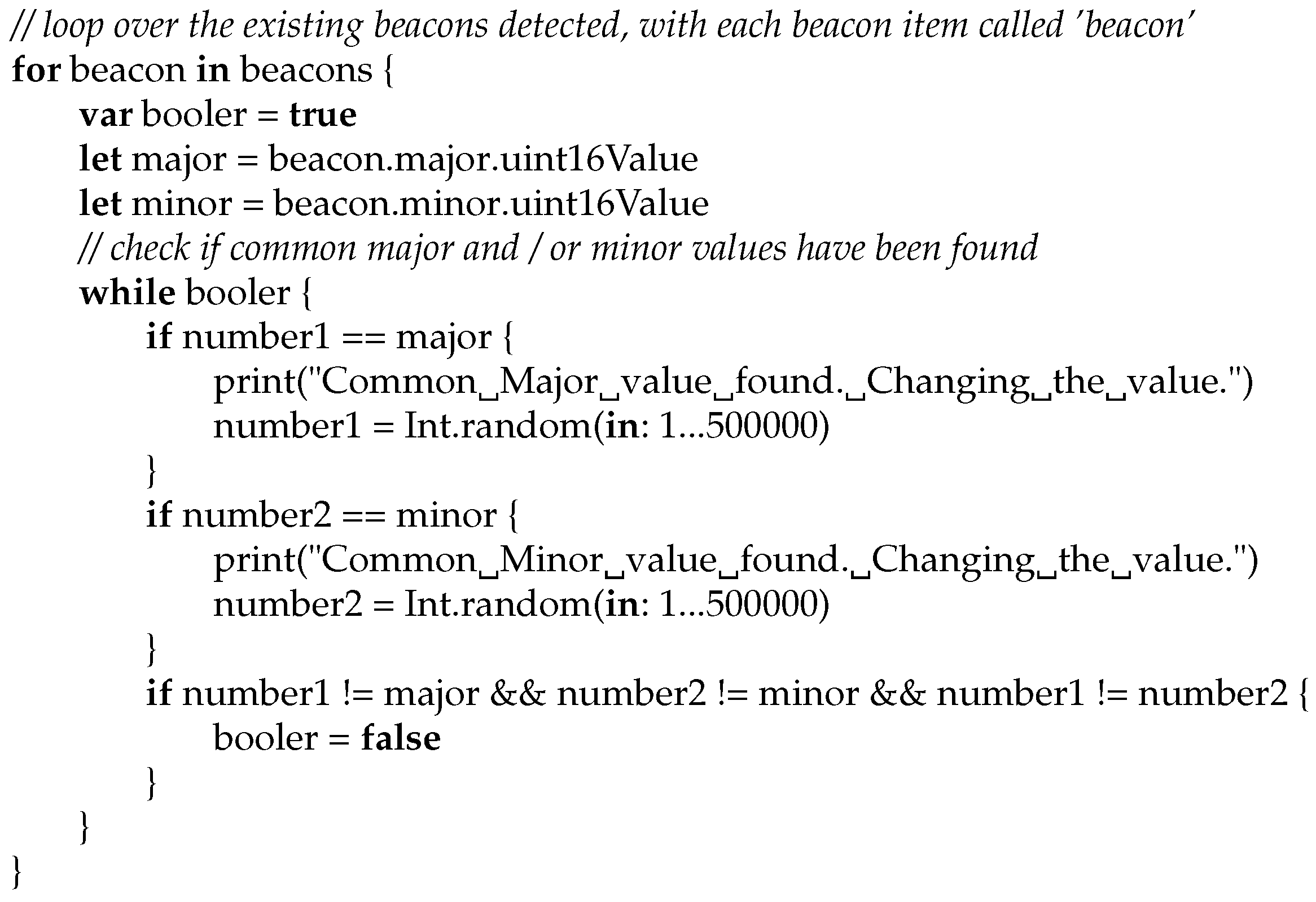

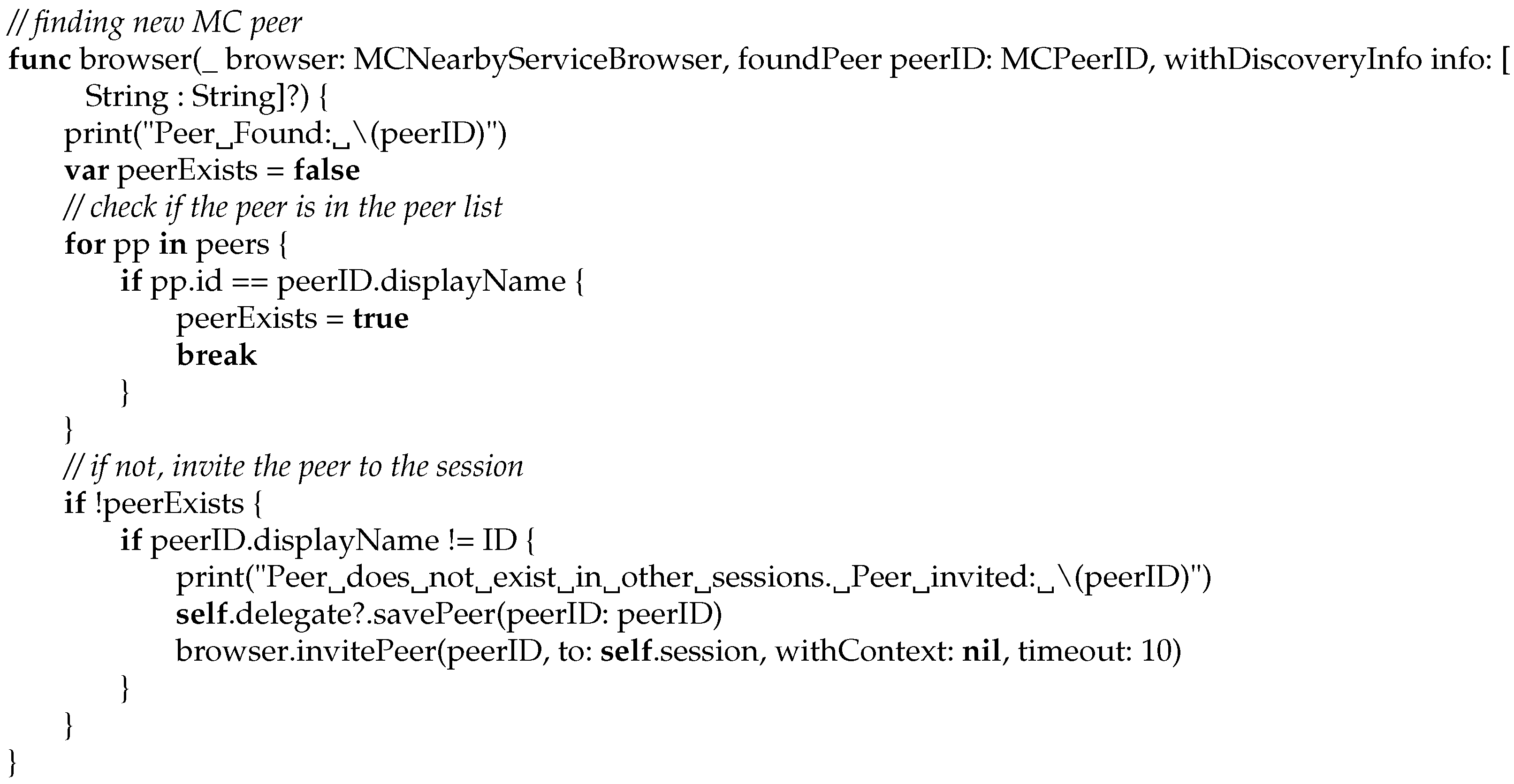
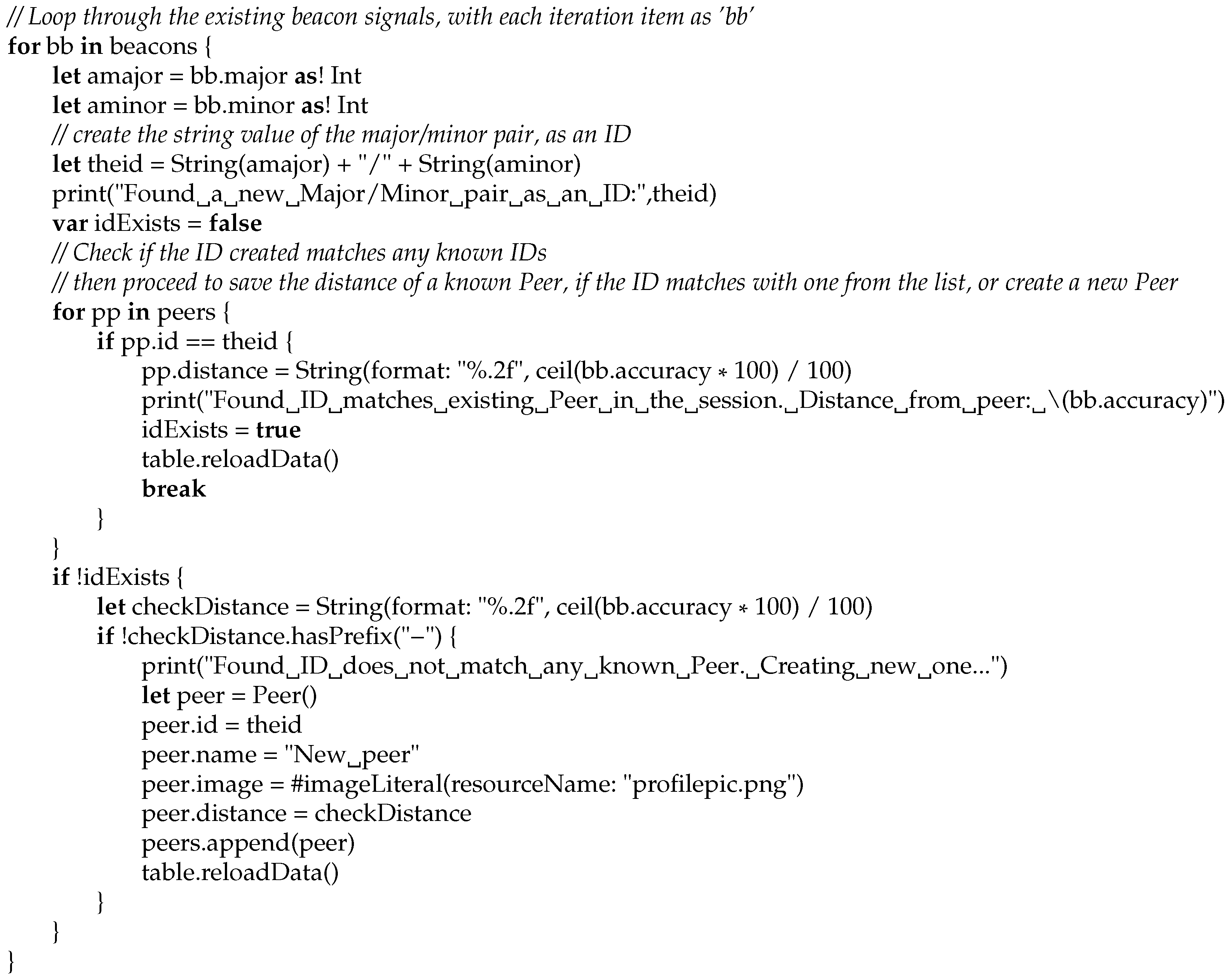
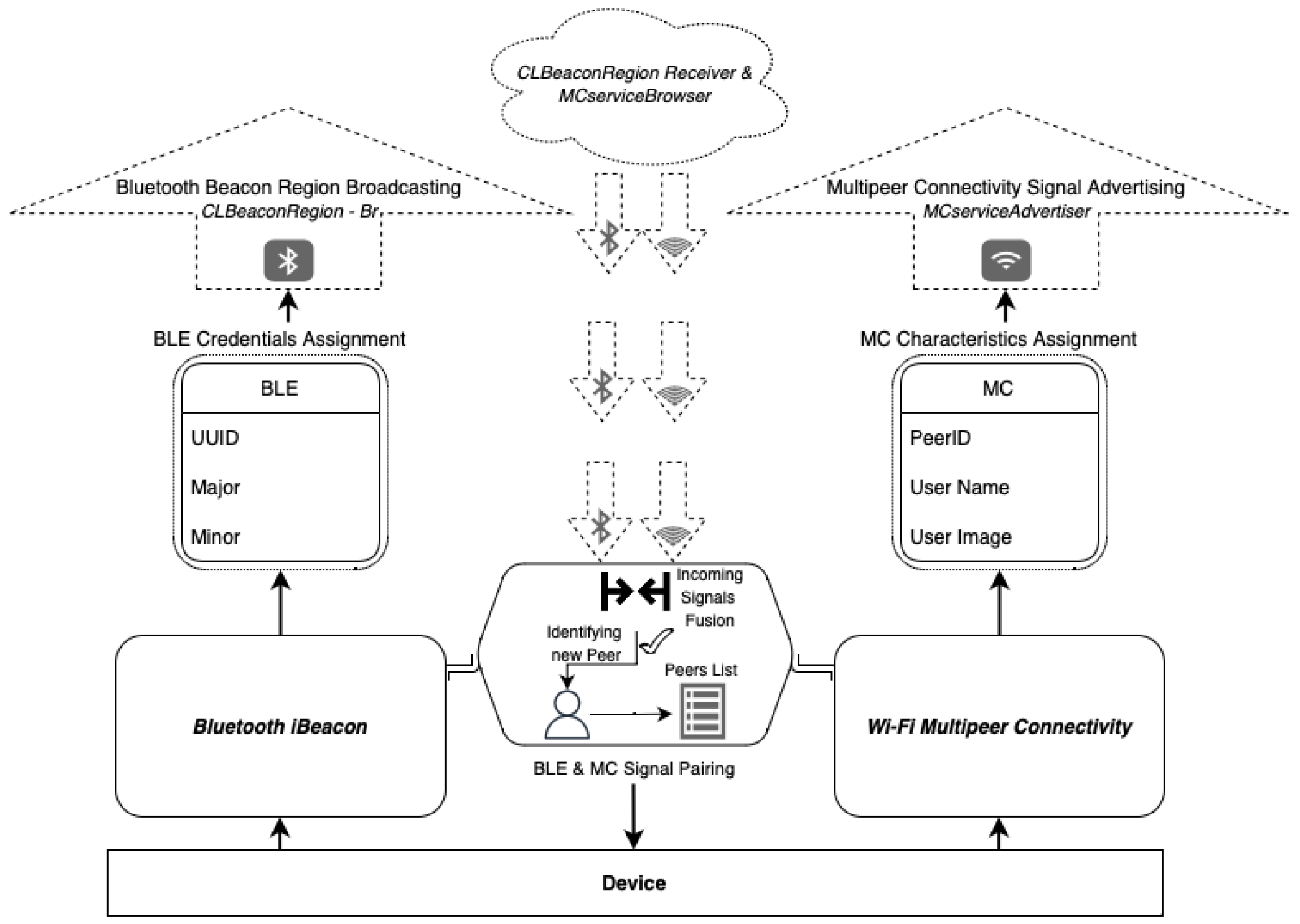
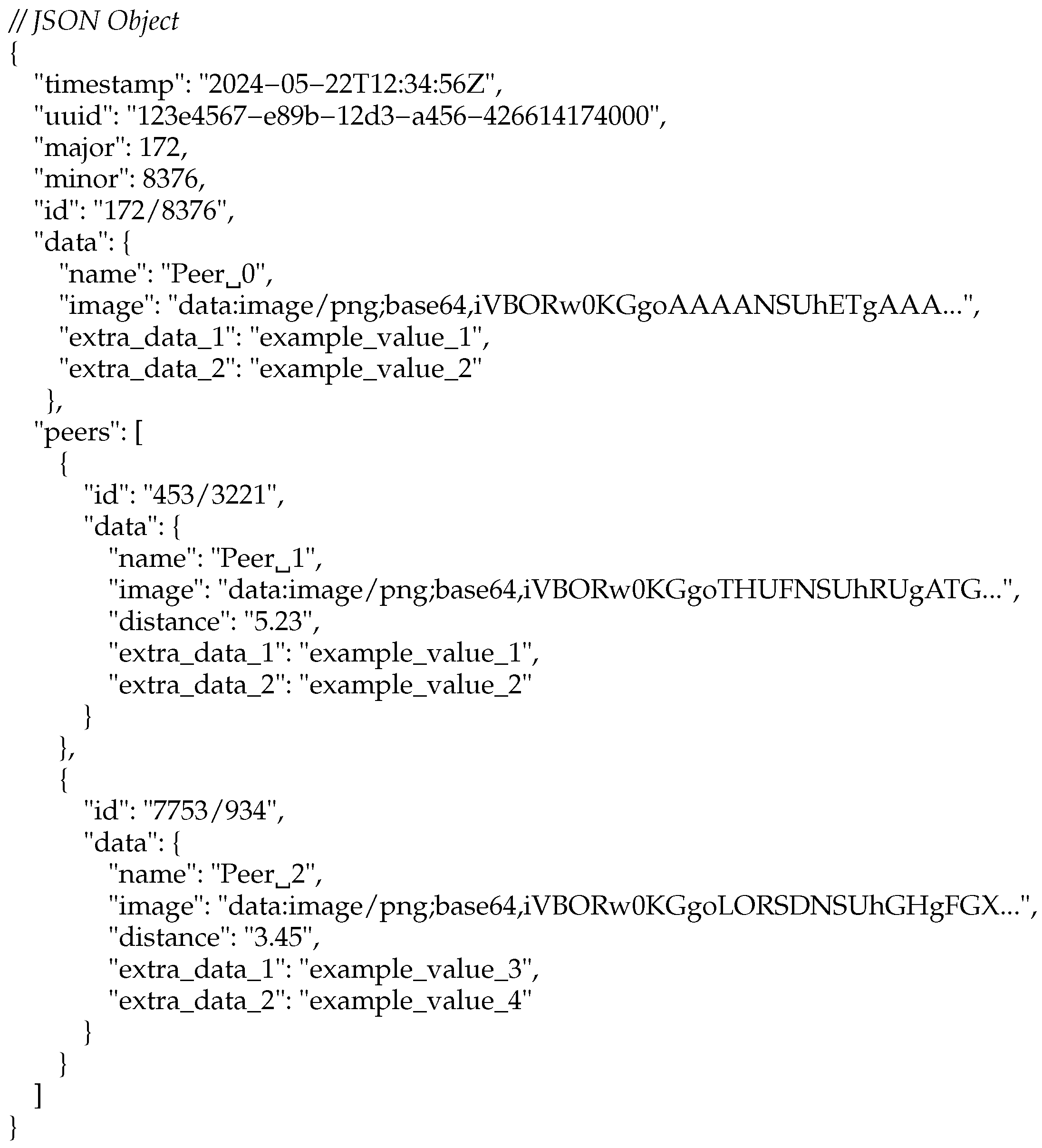
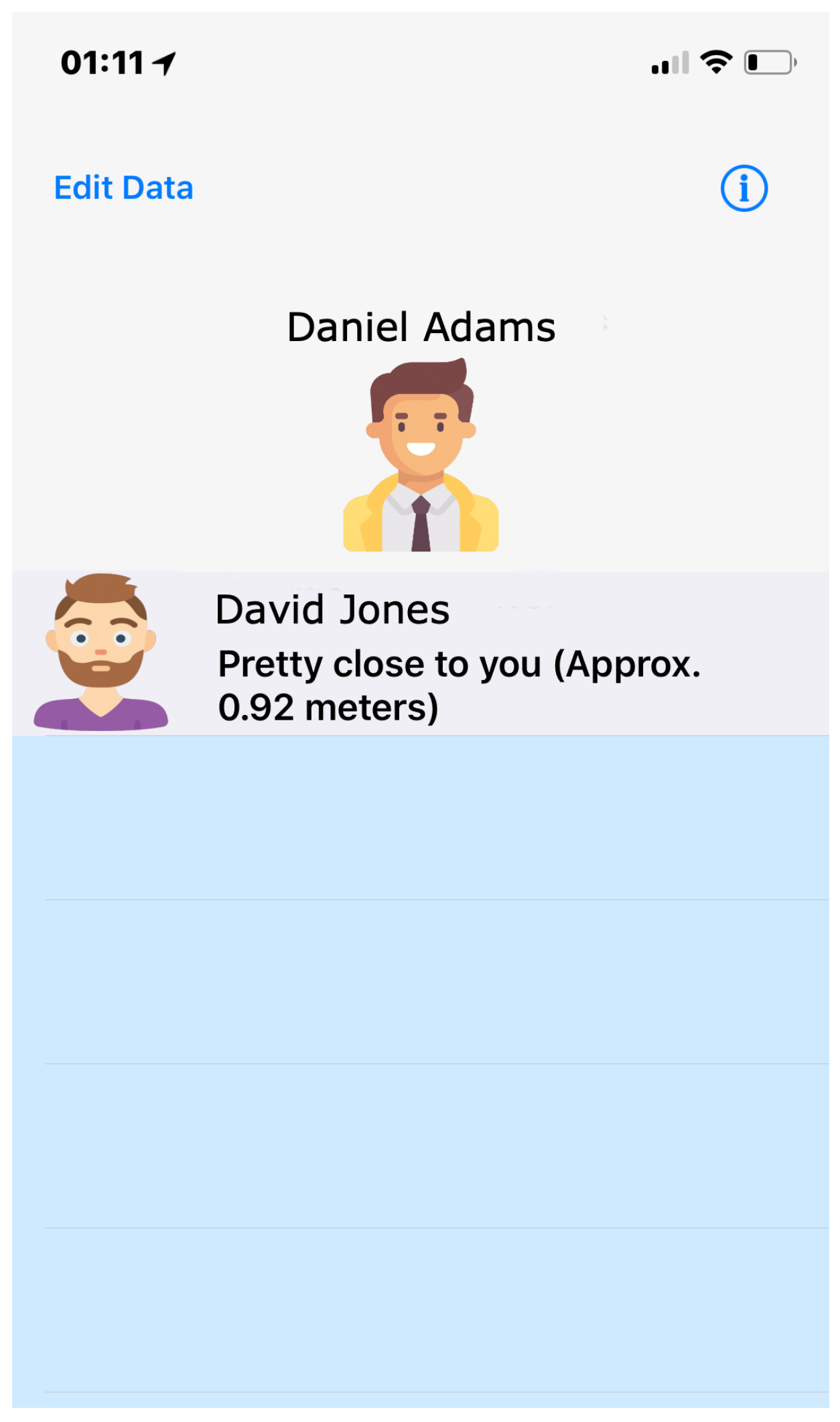
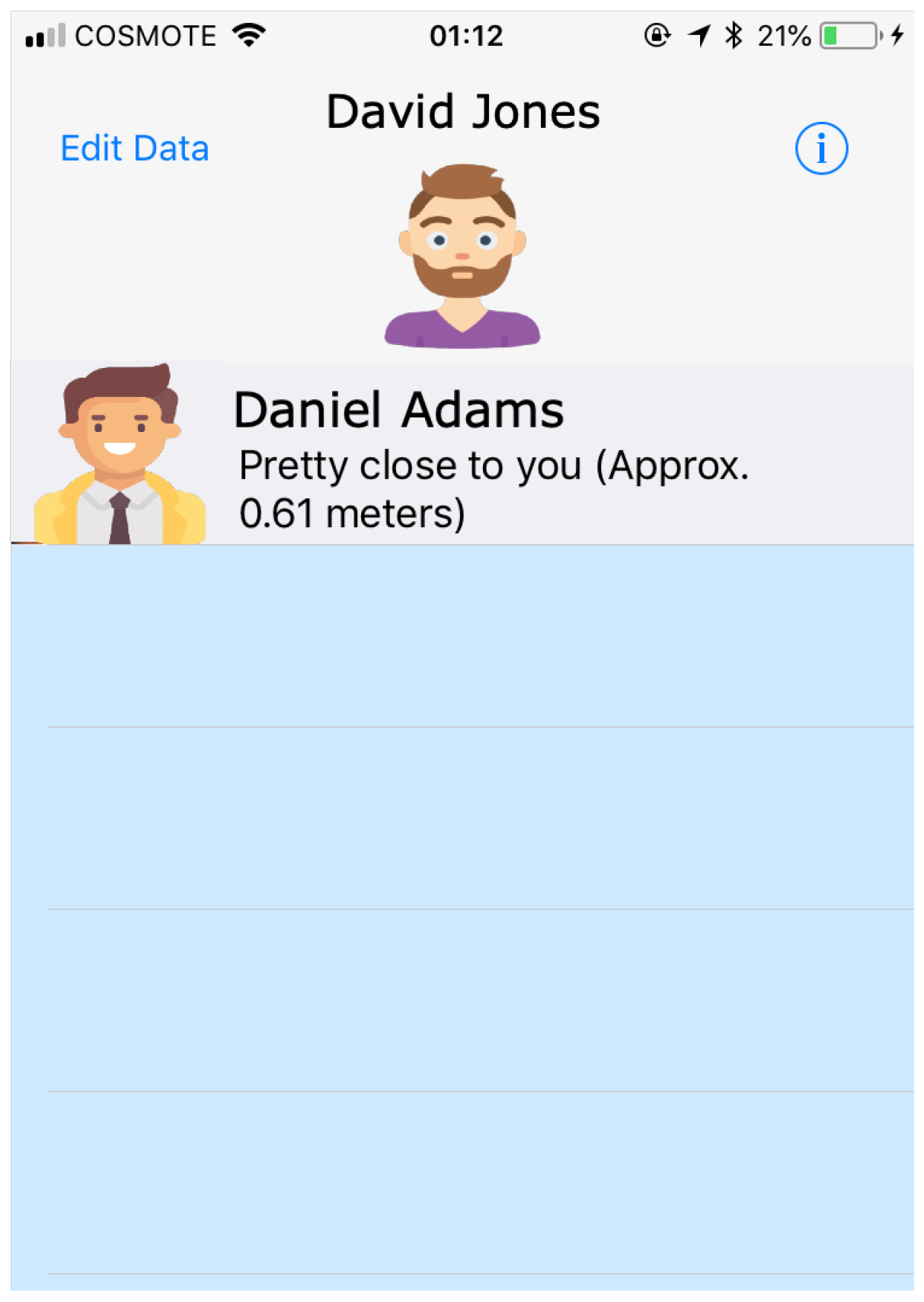
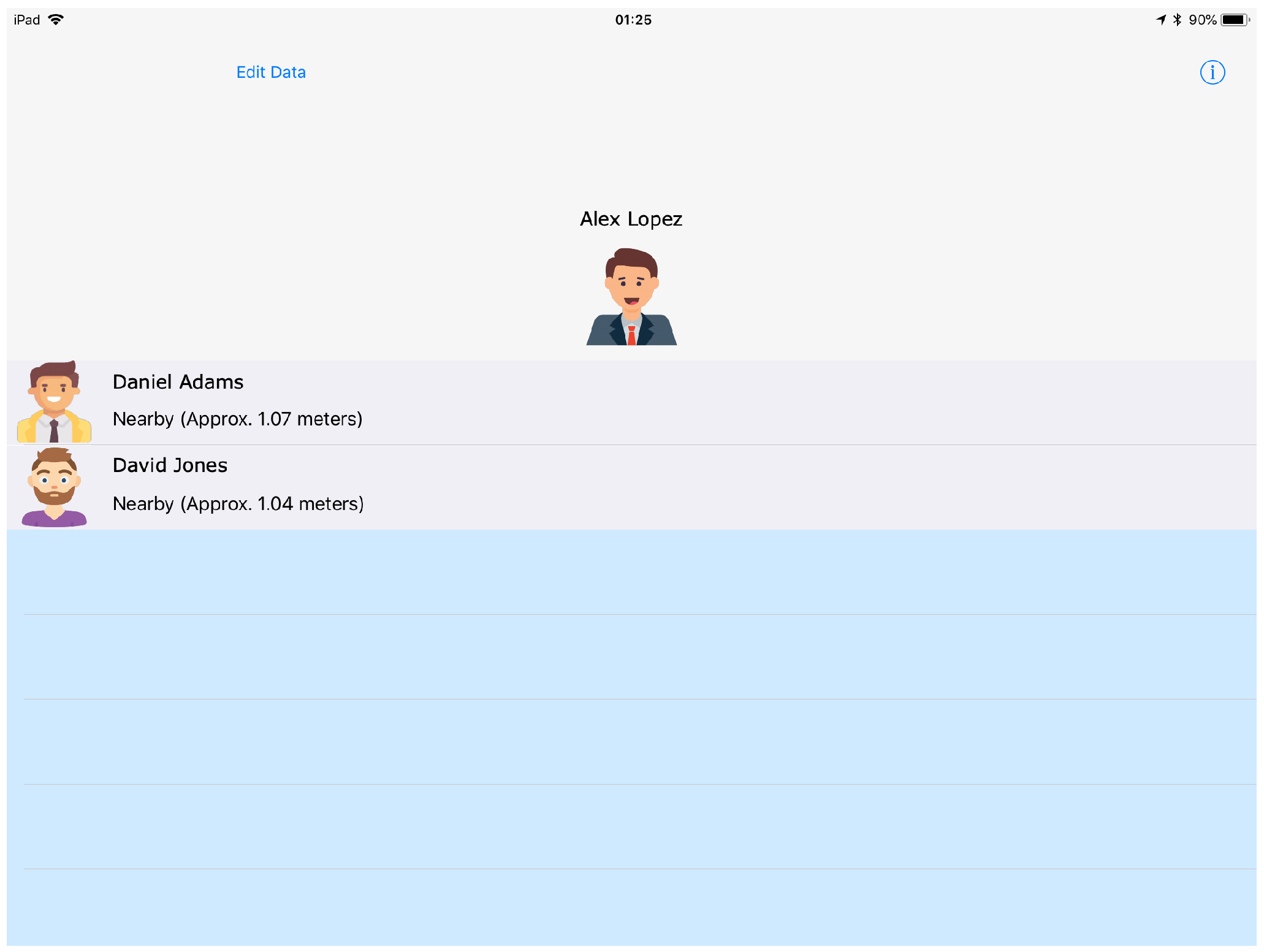
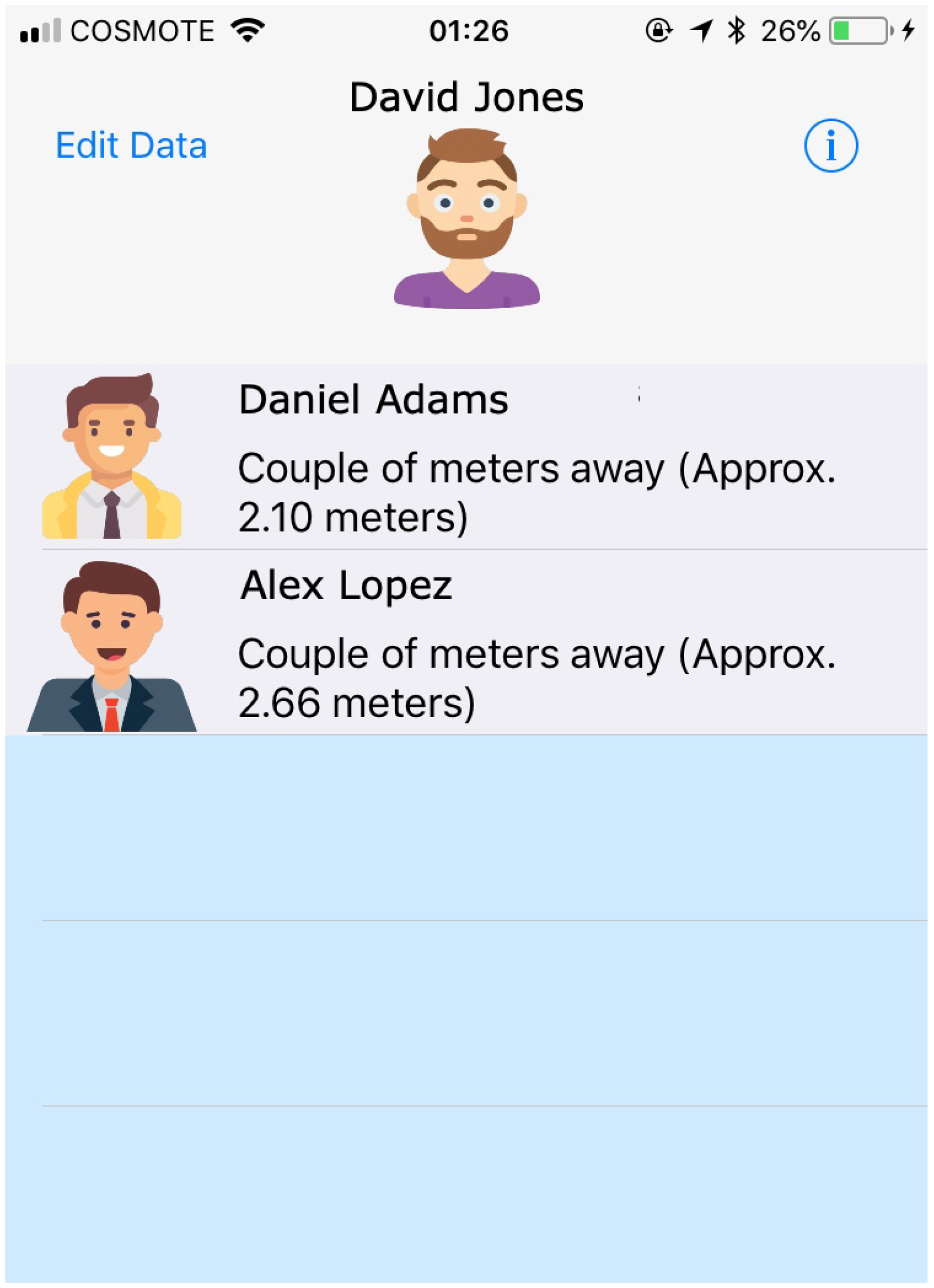
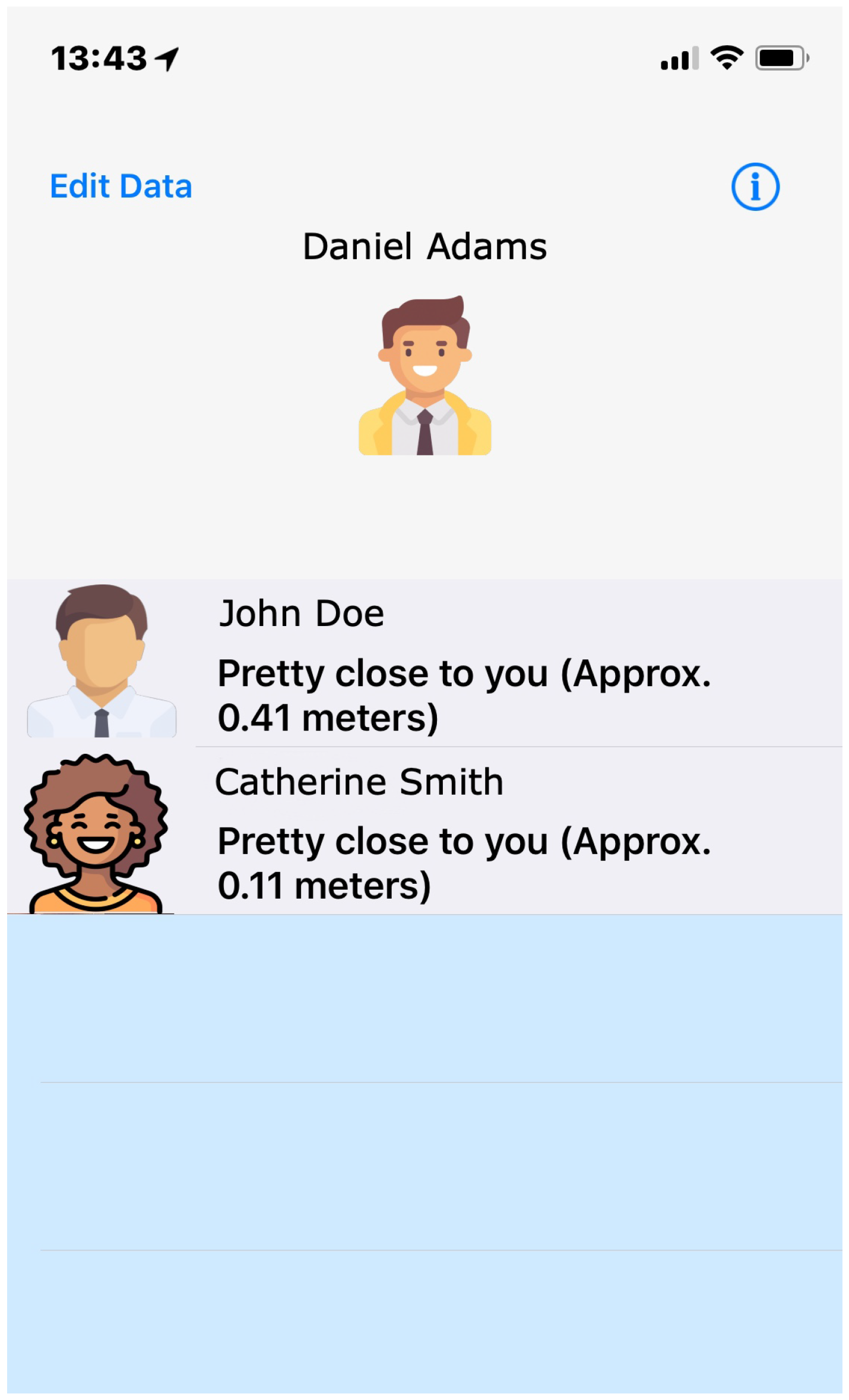
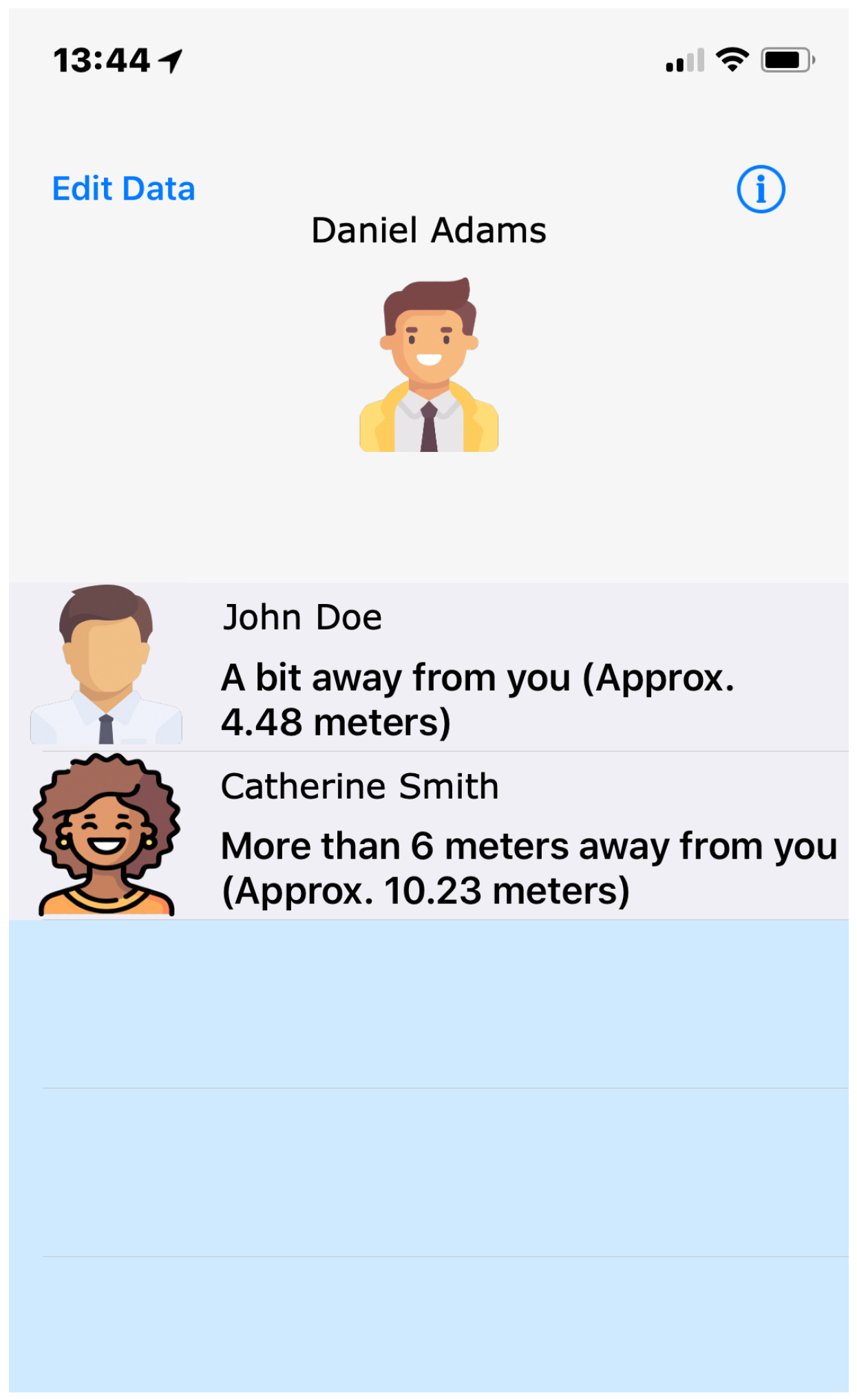
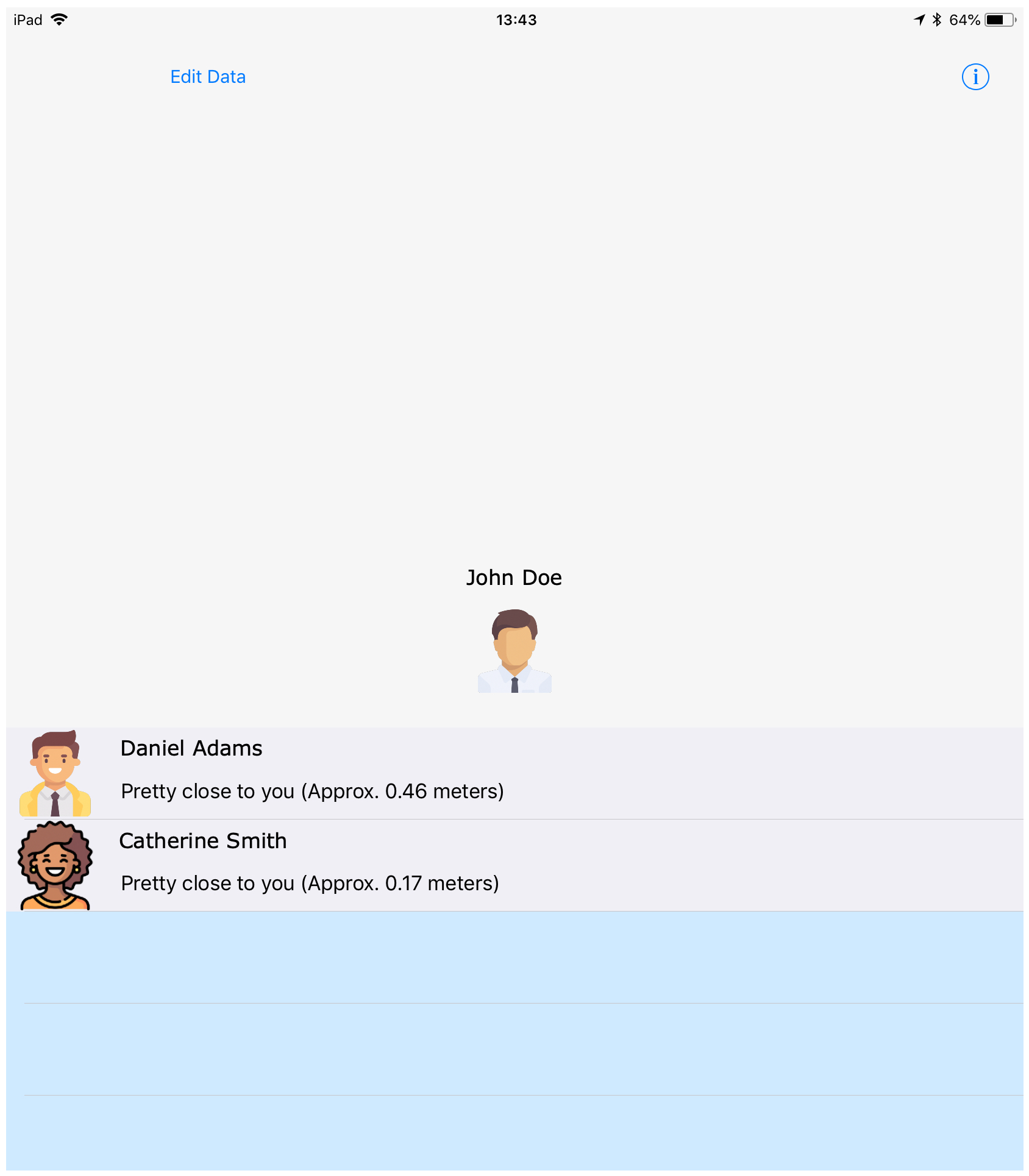
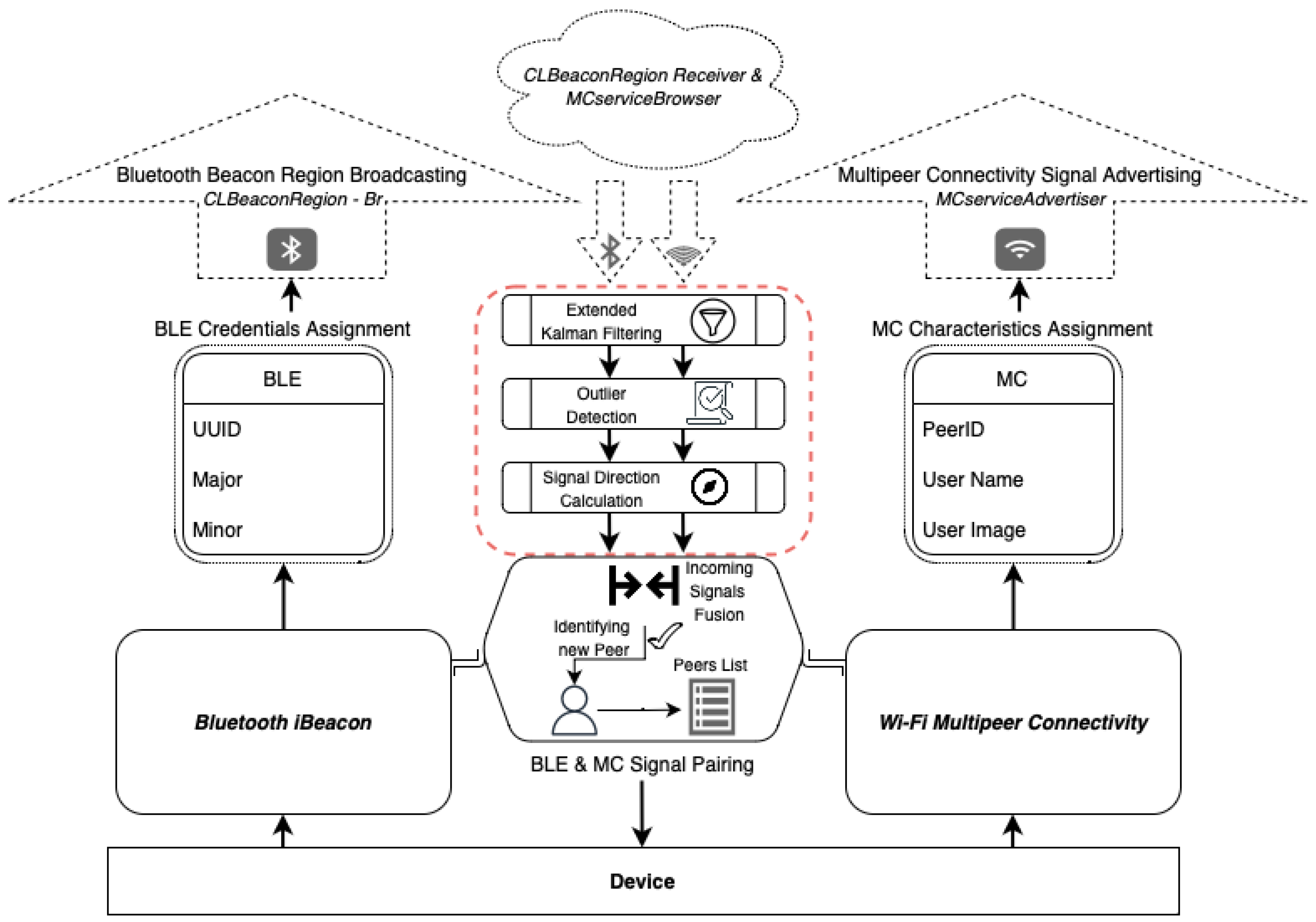
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).