

Artificial Neural Network-Based Real-Time Power Management for a Hybrid Renewable Source Applied for a Water Desalination System


Abstract
:1. Introduction
2. Modeling of the Proposed System
2.1. Hybrid PV/Wind Source
2.2. Hydraulic System Modeling
2.2.1. Modeling of the Desalination Motor Pump and Reverse Osmosis
2.2.2. Modeling of the Drawing Water Motor Pump P1
2.2.3. Modeling of the Water Storage Motor Pump P3
2.2.4. Capacity of Water Tanks
3. The Integrated Energy Management
- Step 1: Design the dynamic simulator-based system models [19];
- Step 2: Develop a fuzzy-logic energy management system [14];
- Step 3: Develop an optimized fuzzy-logic energy management system [15];
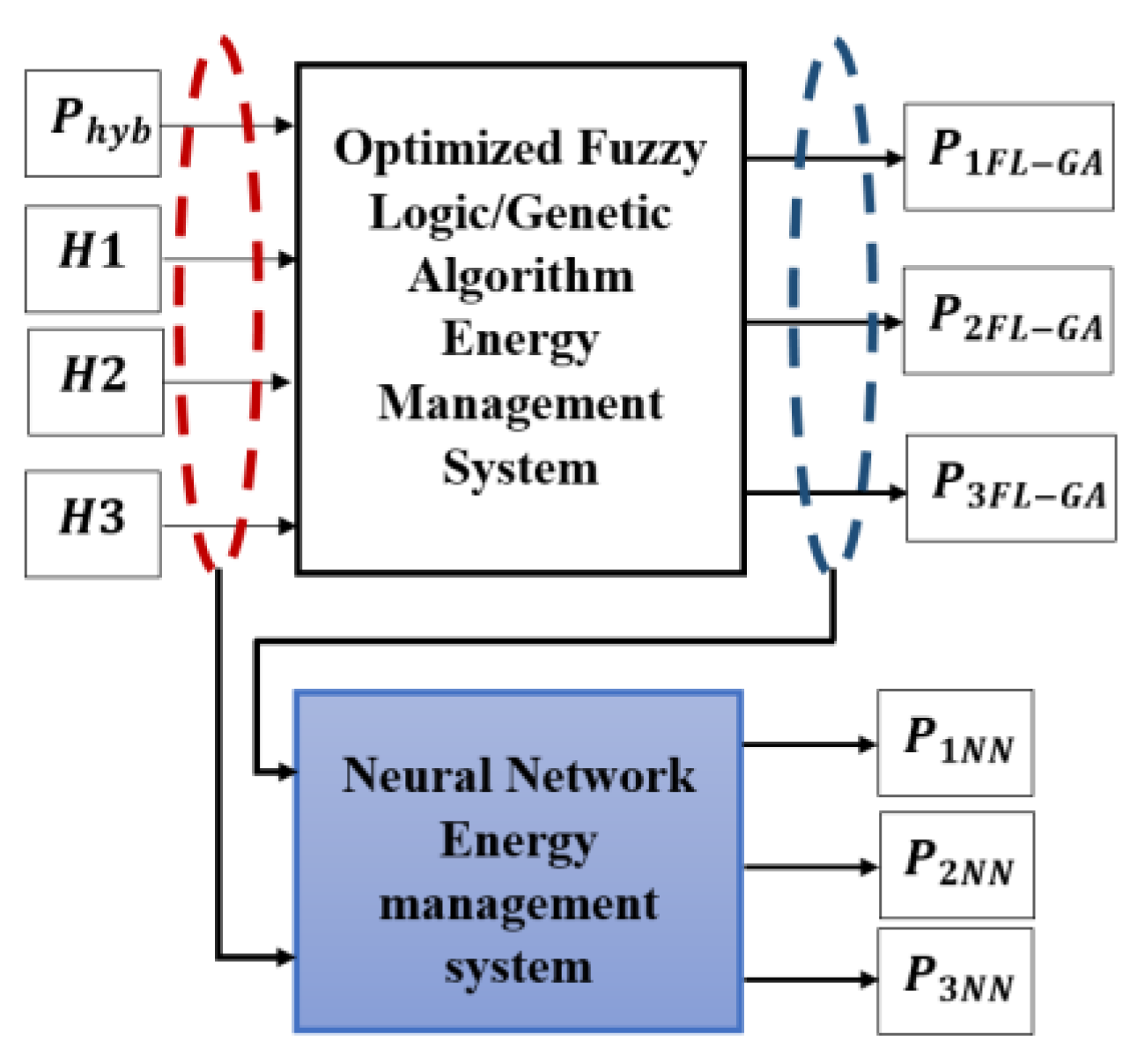
- Step 4: Develop an ANNEMS based on the optimized fuzzy-logic results;
- Step 5: Carry out experimental validation of the developed ANNEMS in real time using a test bench prototype.
3.1. Principale of the Dynamic Simulator
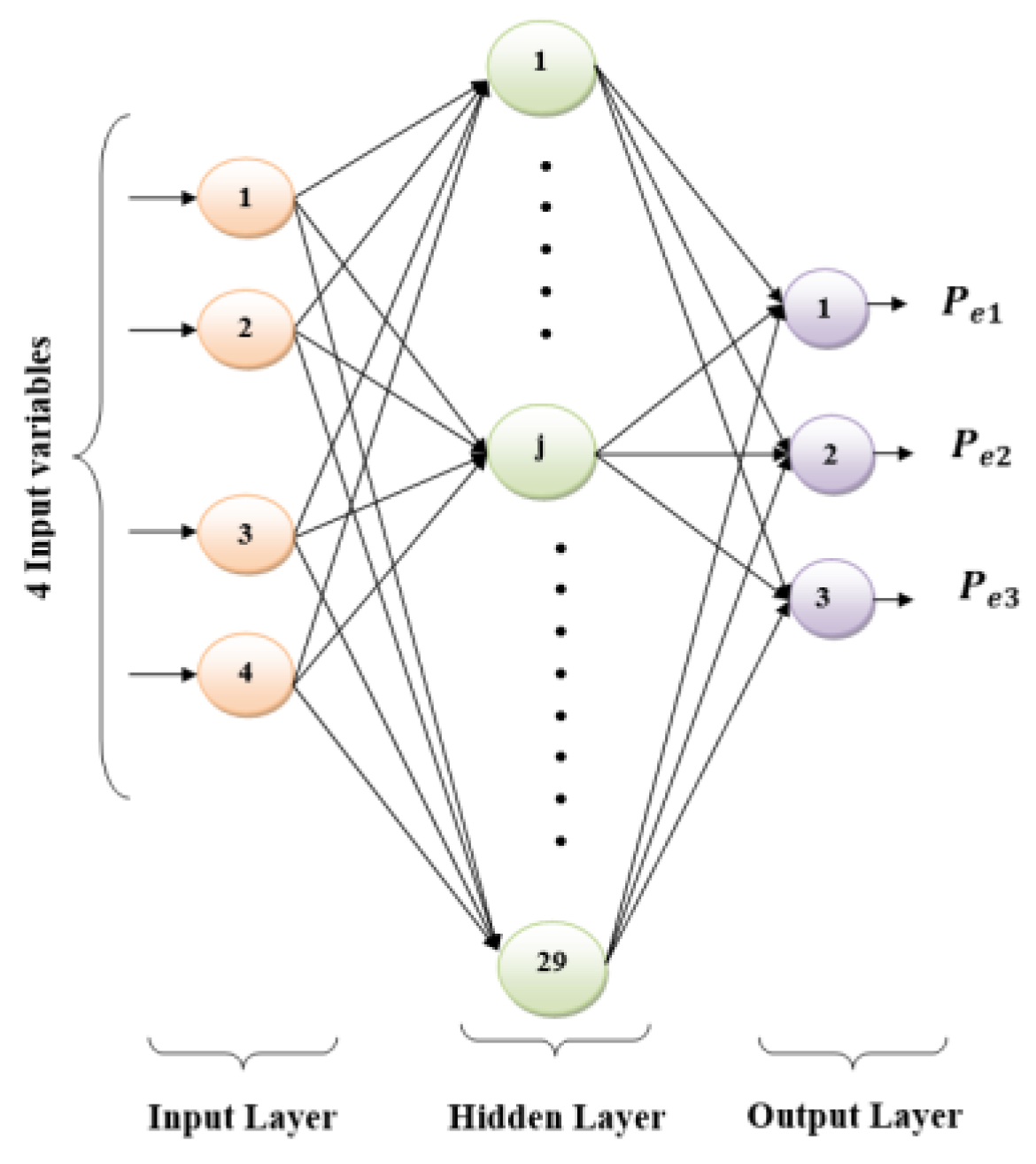
3.2. Artificial Neural Network Power Management Strategy
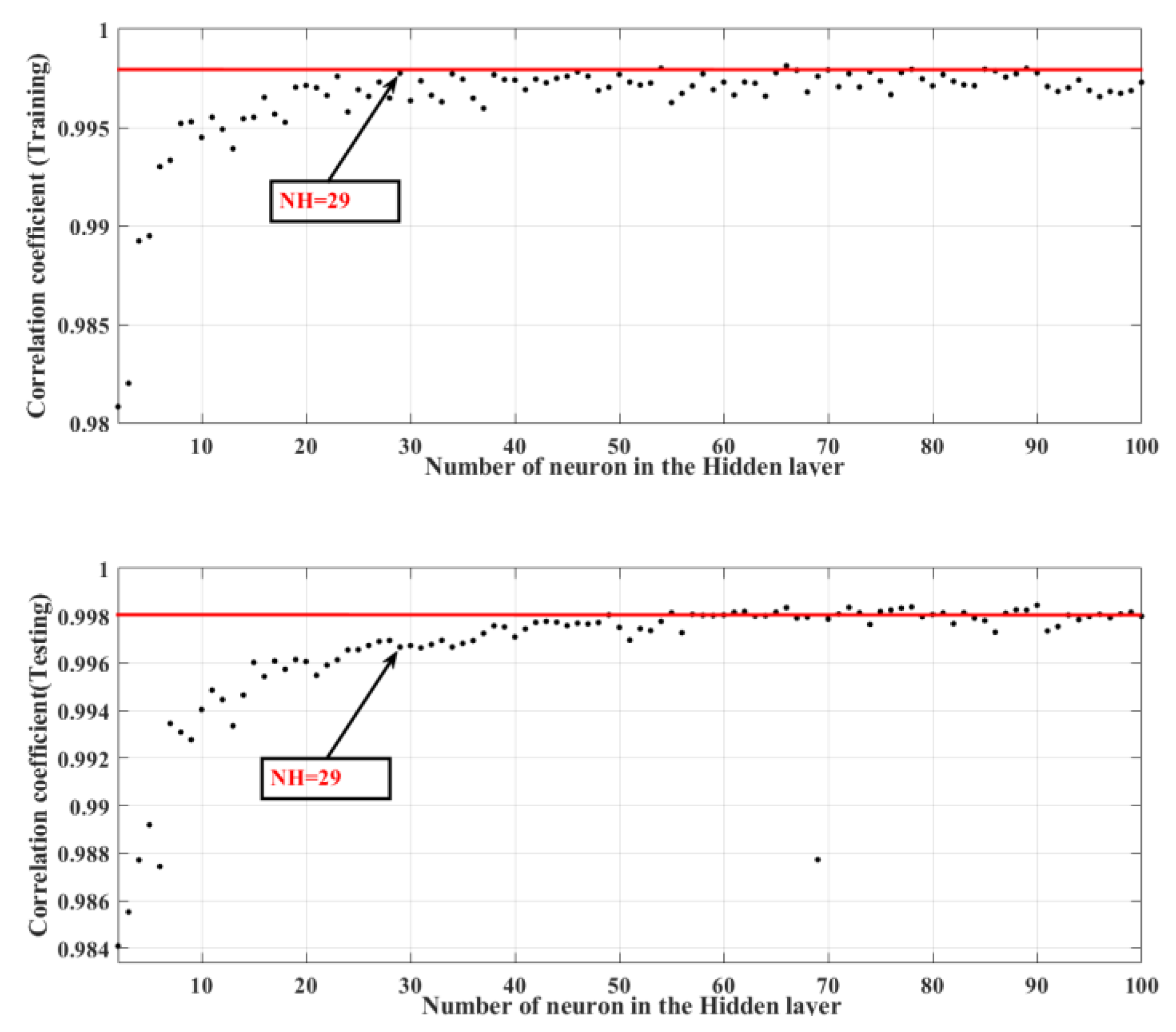
3.3. Parametric Sensitivity Algorithm
4. Analysis of Errors Generated in Neural Network EMS
5. Experimental Validation of the ANNEMS
5.1. Experimental Test Bench Characteristics
5.1.1. PV/Wind Emulator
5.1.2. Implementation of the Control Strategy (PFOC)
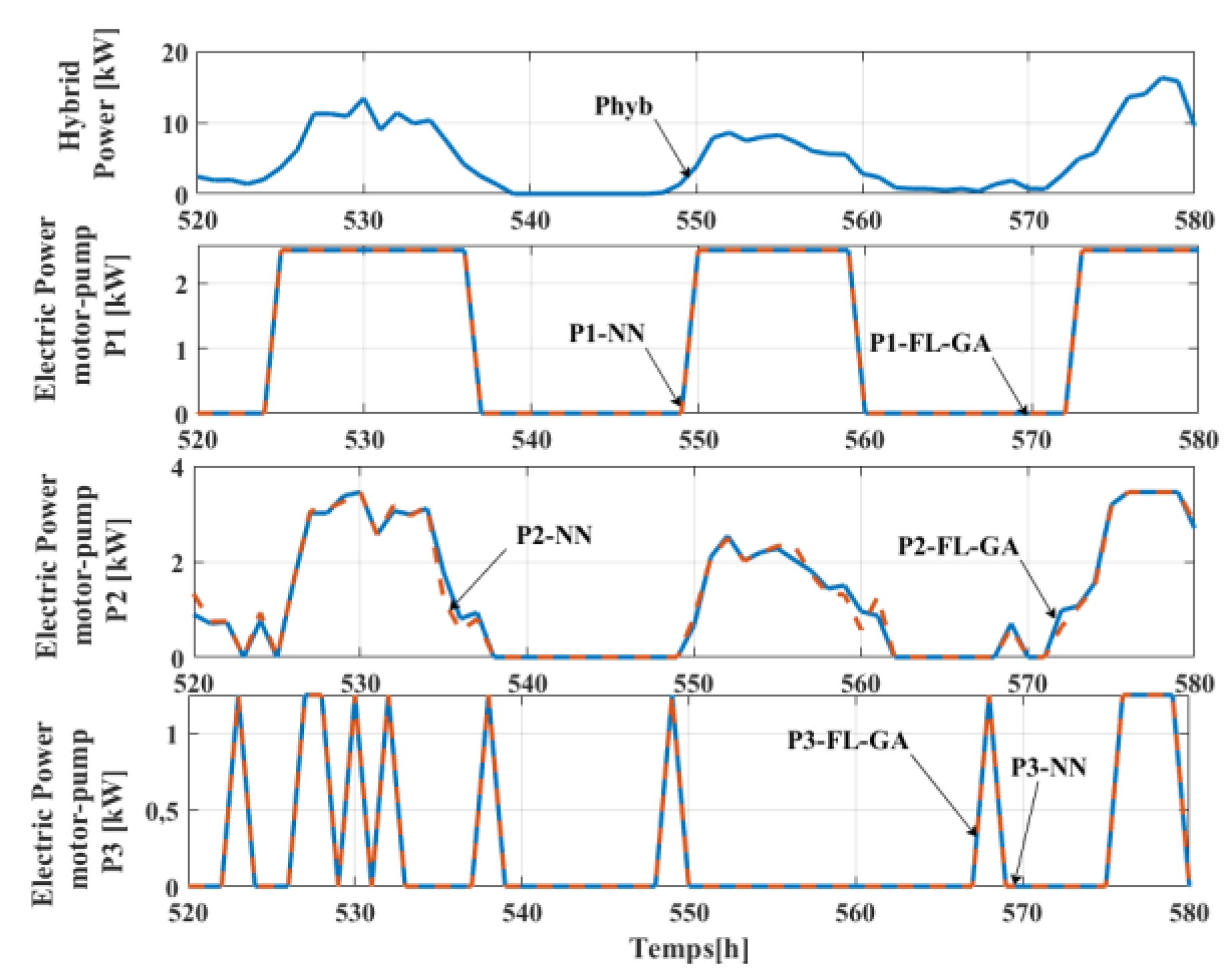
5.2. Implementation and Analysis of the Neural Network Energy Management Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vinci, G.; Maddaloni, L.; Mancini, L.; Prencipe, S.A.; Ruggeri, M.; Tiradritti, M. The Health of the Water Planet: Challenges and Opportunities in the Mediterranean Area. An Overview. Earth 2021, 2, 894–919. [Google Scholar] [CrossRef]
- The United Nations World Water Development Report 2019. Available online: https://www.unwater.org/ (accessed on 8 May 2024).
- Greenlee, L.F.; Lawler, D.F.; Freeman, B.D.; Marrot, B.; Moulin, P. Reverse Osmosis Desalination: Water Sources, Technology, and Today’s Challenges. Water Res. 2009, 43, 2317–2348. [Google Scholar] [CrossRef] [PubMed]
- Rhouma, A.B.; Belhadj, J.; Roboam, X. Energy management and control strategy for water pumping system fed by intermittent renewable sources. In Proceedings of the 12th International Conference on Modeling and Simulation of Electric Machines, Converters and Systems (ELECTRIMACS’2017), Toulouse, France, 4–6 July 2017. [Google Scholar]
- García-Rodríguez, L. Renewable Energy Applications in Desalination: State of the Art. Sol. Energy 2003, 75, 381–393. [Google Scholar] [CrossRef]
- Alkaisi, A.; Mossad, R.; Sharifian-Barforoush, A. A Review of the Water Desalination Systems Integrated with Renewable Energy. Energy Procedia 2017, 110, 268–274. [Google Scholar] [CrossRef]
- Macana, C.A.; Pota, H.R.; Zhu, Q.; Guerrero, J.M.; Vasquez, J.C. Experiments on a Real-Time Energy Management System for Islanded Prosumer Microgrids. Electronics 2019, 8, 925–942. [Google Scholar] [CrossRef]
- OECD. Energy Policies of IEA Countries; OECD: Paris, France, 2017. [Google Scholar]
- García, P.; Torreglosa, J.P.; Fernández, L.M.; Jurado, F. Optimal energy management system for stand-alone wind turbine/photovoltaic/hydrogen/battery hybrid system with supervisory control based on fuzzy logic. Int. J. Hydrogen Energy 2013, 33, 14146–14158. [Google Scholar] [CrossRef]
- Li, Q.; Loy-Benitez, J.; Nam, K.; Hwangbo, S.; Rashidi, J.; Yoo, C. Sustainable and reliable design of reverse osmosis desalination with hybrid renewable energy systems through supply chain forecasting using recurrent neural networks. Energy 2019, 178, 277–292. [Google Scholar] [CrossRef]
- Dimitriou, E.; Loukatos, D.; Tampakakis, E.; Arvanitis, K.G.; Papadakis, G. An Experimental Investigation of an Open-Source and Low-Cost Control System for Renewable-Energy-Powered Reverse Osmosis Desalination. Electronics 2024, 13, 813–833. [Google Scholar] [CrossRef]
- Leonori, S.; Paschero, M.; Frattale Mascioli, F.M.; Rizzi, A. Optimization strategies for Microgrid energy management systems by Genetic Algorithms. Appl. Soft Comput. 2020, 86, 105–903. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Y.; Zhang, C.; Yang, M. Improved artificial neural network method for predicting photovoltaic output performance. Glob. Energy Interconnect. 2020, 3, 553–561. [Google Scholar] [CrossRef]
- Zgalmi, A.; Ben Rhouma, A.; Cherif, H.; Belhadj, J. Energy management based fuzzy-logic of a reverse osmosis desalination powered with hybrid system. In Proceedings of the IEEE 2nd International Conference on Signal, Control and Communication (SCC), Hammamet, Tunisia, 20–22 December 2021. [Google Scholar]
- Zgalmi, A.; Ben Rhouma, A.; Cherif, H.; Belhadj, J. Intelligent Artificial power sharing of water desalination plant fed by renewable source. In Proceedings of the IEEE International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), INSAT, Tunis, Tunisia, 26–28 October 2022. [Google Scholar]
- Layadi, T.M.; Champenois, G.; Mostefai, M. Modeling and Design Optimization of an Autonomous Multisource System Under a Permanent Power-Supply Constraint. IEEE Trans. Sustain. Comput. 2015, 3, 872–880. [Google Scholar] [CrossRef]
- Abbes, D.; Martinez, A.; Champenois, G. Eco-design optimisation of an autonomous hybrid wind–photovoltaic system with battery storage. IET Renew. Power Gener. 2012, 6, 358–371. [Google Scholar] [CrossRef]
- Zaibi, M.; Cherif, H.; Champenois, G.; Sareni, B.; Roboam, X.; Belhadj, J. Sizing methodology based on design of experiments for freshwater and electricity production from multi-source renewable energy systems. Desalination 2018, 446, 94–103. [Google Scholar] [CrossRef]
- Zgalmi, A.; Cherif, H.; Belhadj, J. Smart energy management based on the artificial neural network of a reverse osmosis desalination unit powered by renewable energy sources. In Innovative and Intelligent Technology-Based Services for Smart Environments—Smart Sensing and Artificial Intelligence, 1st ed.; Ben Slama, S., Choubani, F., Benavente-Peces, C., Abdelkarim, A., Eds.; CRC Press: London, UK, 2021; pp. 181–188. [Google Scholar]
- Dhanalakshmi, V.; Bino, D.; Saravanan, A.M. Opinion mining from student feedback data using supervised learning algorithms. In Proceedings of the 3rd MEC International Conference on Big Data and Smart City (ICBDSC), Mascat, Oman, 15–18 March 2016. [Google Scholar]
- Shang, Y.; Li, S. FedPT-V2G: Security enhanced federated transformer learning for real-time V2G dispatch with non-IID data. Appl. Energy 2024, 358, 122–626. [Google Scholar] [CrossRef]
- Zhu, N.; Wang, Y.; Yuan, K.; Yan, J.; Li, Y.; Zhang, K. GGNet: A novel graph structure for power forecasting in renewable power plants considering temporal lead-lag correlations. Appl. Energy 2024, 364, 123–194. [Google Scholar] [CrossRef]
- Tan, M.; Hu, C.; Chen, J.; Wang, L.; Li, Z. Multi-node load forecasting based on multi-task learning with modal feature. Eng. Appl. Artif. Intell. 2022, 112. [Google Scholar] [CrossRef]
- Taki, M.; Rohani, A.; Yildizhan, H. Application of machine learning for solar radiation modeling. Theor. Appl. Climatol. 2021, 143, 1599–1613. [Google Scholar] [CrossRef]
- Rahimi, M.; Abbaspour-Fard, M.H.; Rohani, A. A multi-data-driven procedure towards a comprehensive understanding of the activated carbon electrodes performance (using for supercapacitor) employing ANN technique. J. Renew. Energy 2021, 180, 980–992. [Google Scholar] [CrossRef]
- Siavash, N.K.; Ghobadian, B.; Najafi, G.; Rohani, A.; Tavakoli, T.; Mahmoodi, E.; Mamat, R.; Mazlan, M. Prediction of power generation and rotor angular speed of a small wind turbine equipped to a controllable duct using artificial neural network and multiple linear regression. Environ. Res. 2021, 196, 110434. [Google Scholar] [CrossRef] [PubMed]
- Rahimi, M.; Abbaspour-Fard, M.H.; Rohani, A. Synergetic effect of N/O functional groups and microstructures of activated carbon on supercapacitor performance by machine learning. J. Power Sources 2022, 521, 230–968. [Google Scholar] [CrossRef]
- Ben Rhouma, A.; Roboam, X.; Belhadj, J.; Sareni, B. Improved Control Strategy for Water Pumping System Fed by Intermittent Renewable Source. Energies 2023, 16, 7593. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Algorithm | Correlation Coefficient (R) | RMSE (W) | |||
|---|---|---|---|---|---|
| Entrainment | Test | Entrainment | Test | Entrainment | |
| Trainbfg | 0.94767 | 0.94554 | 601 | 589.6 | 0.9323 |
| Trainbr | 0.9803 | 0.98033 | 243.7 | 220.9 | 0.9896 |
| Traincgb | 0.95886 | 0.95872 | 515.3 | 512 | 0.9517 |
| Traincgf | 0.86502 | 0.86221 | 1071 | 994.3 | 0.7606 |
| Traincgp | 0.96518 | 0.96182 | 520.7 | 512.9 | 0.9508 |
| Traingd | 0.44212 | 0.44284 | 6774 | 6781 | 0.08678 |
| Traingdm | 0.41849 | 0.42706 | 3255 | 3301 | 0.1348 |
| Traingda | 0.77108 | 0.77326 | 1153 | 3301 | 0.4116 |
| Traingdx | 0.89504 | 0.89161 | 786.1 | 744.9 | 0.8739 |
| Trainlm | 0.97833 | 0.97845 | 291.4 | 253.2 | 0.9851 |
| Trainoss | 0.96016 | 0.96637 | 678.2 | 651.5 | 0.914 |
| Trainrp | 0.96692 | 0.96766 | 540 | 524.2 | 0.9467 |
| Trainscg | 0.96004 | 0.96063 | 530.1 | 526.9 | 0.9487 |
| Function Type in the Output and Hidden Layers | Correlation Coefficient (R) | RMSE (W) | |||
|---|---|---|---|---|---|
| Entrainment | Test | Entrainment | Test | Entrainment | |
| [Tansig–purelin] | 0.98031 | 0.9804 | 248.3 | 217.3 | 0.9892 |
| [Tansig–tansig] | 0.98121 | 0.98106 | 265 | 227.5 | 0.9878 |
| [Tansig–logsig] | 0.79657 | 0.79676 | 1282 | 1266 | 0.6667 |
| [Logsig–logsig] | 0.80326 | 0.80468 | 1284 | 1267 | 0.666 |
| [Logsig–tansig] | 0.97984 | 0.98044 | 202.6 | 167 | 0.9928 |
| [Logsig–purelin] | 0.98128 | 0.98135 | 295.3 | 247.7 | 0.9846 |
| [Purelin–logsig] | 0.61952 | 0.61924 | 1302 | 1282 | 0.6607 |
| [Purelin–purelin] | 0.81655 | 0.81671 | 1006 | 978.3 | 0.7744 |
| [Purelin–tansig] | 0.79511 | 0.79442 | 482.5 | 477.9 | 0.9578 |
| Scenarios | Pumping | Desalination | Storage | |
|---|---|---|---|---|
| Mode | ||||
| M0 | - | - | - | |
| M1 | - | - | √ | |
| M2 | - | √ | - | |
| M3 | √ | - | - | |
| M4 | - | √ | √ | |
| M5 | √ | - | √ | |
| M6 | √ | √ | - | |
| M7 | √ | √ | √ | |
| DC Power Supply | |
|---|---|
| Reference | KEYSIGHT-N8762 |
| Output DC power range | 0–5100 W |
| Output DC voltage range | 0–600 V |
| Output DC current range | 0–8.5 A |
| Pumping Motor Pump | Storage Motor Pump |
|---|---|
| LOWARA 5HM06 | LOWARA CEA 80/5 |
| 1.1 kW | 0.75 kW |
| 3 Phases, 50 Hz | 3 Phases, 50 Hz |
| 240 V-3.6 A | 240 V-3.65 A |
| 40–142 L/min | 30–100 L/min |
| RO Membrane | |
|---|---|
| Reference | VONTRON LP21-4040 |
| Diameter–Area | 4”–40 m² |
| Minimum salt rejection | 99.5% |
| Freshwater nominal flow | 9.1 m³/day |
| Maximum operating pressure | 15.5 bar |
| Maximum recovery rate | 15% |
| Maximum water temperature brackish water pH range | 25 °C |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zgalmi, A.; Ben Rhouma, A.; Belhadj, J. Artificial Neural Network-Based Real-Time Power Management for a Hybrid Renewable Source Applied for a Water Desalination System. Electronics 2024, 13, 2503. https://doi.org/10.3390/electronics13132503
Zgalmi A, Ben Rhouma A, Belhadj J. Artificial Neural Network-Based Real-Time Power Management for a Hybrid Renewable Source Applied for a Water Desalination System. Electronics. 2024; 13(13):2503. https://doi.org/10.3390/electronics13132503
Chicago/Turabian StyleZgalmi, Abir, Amine Ben Rhouma, and Jamel Belhadj. 2024. "Artificial Neural Network-Based Real-Time Power Management for a Hybrid Renewable Source Applied for a Water Desalination System" Electronics 13, no. 13: 2503. https://doi.org/10.3390/electronics13132503
APA StyleZgalmi, A., Ben Rhouma, A., & Belhadj, J. (2024). Artificial Neural Network-Based Real-Time Power Management for a Hybrid Renewable Source Applied for a Water Desalination System. Electronics, 13(13), 2503. https://doi.org/10.3390/electronics13132503