
Two-Area Automatic Generation Control for Power Systems with Highly Penetrating Renewable Energy Sources


Abstract
1. Introduction
- Development of an AGC controller model for a 106-bus power system using DIgSILENT PowerFactory software [24]. This model integrates various power sources such as wind, solar, hydro, and thermal power, with RESs constituting a significant portion of the total generating capacity.
- Testing the AGC system under two scenarios involving instantaneous changes in RES capacity within the system. Scenario 1 is the process of reducing the generation capacity of RES on the grid and Scenario 2 considers the failure of an important generator participating in the AGC system during the frequency adjustment process. These scenarios are designed based on common events observed in practical operations.
- Analyze the operation of traditional generators involved and not involved in the AGC system, as well as system frequency, power flow on tie-lines, and other elements within the power system.
2. Two-Area AGC Model
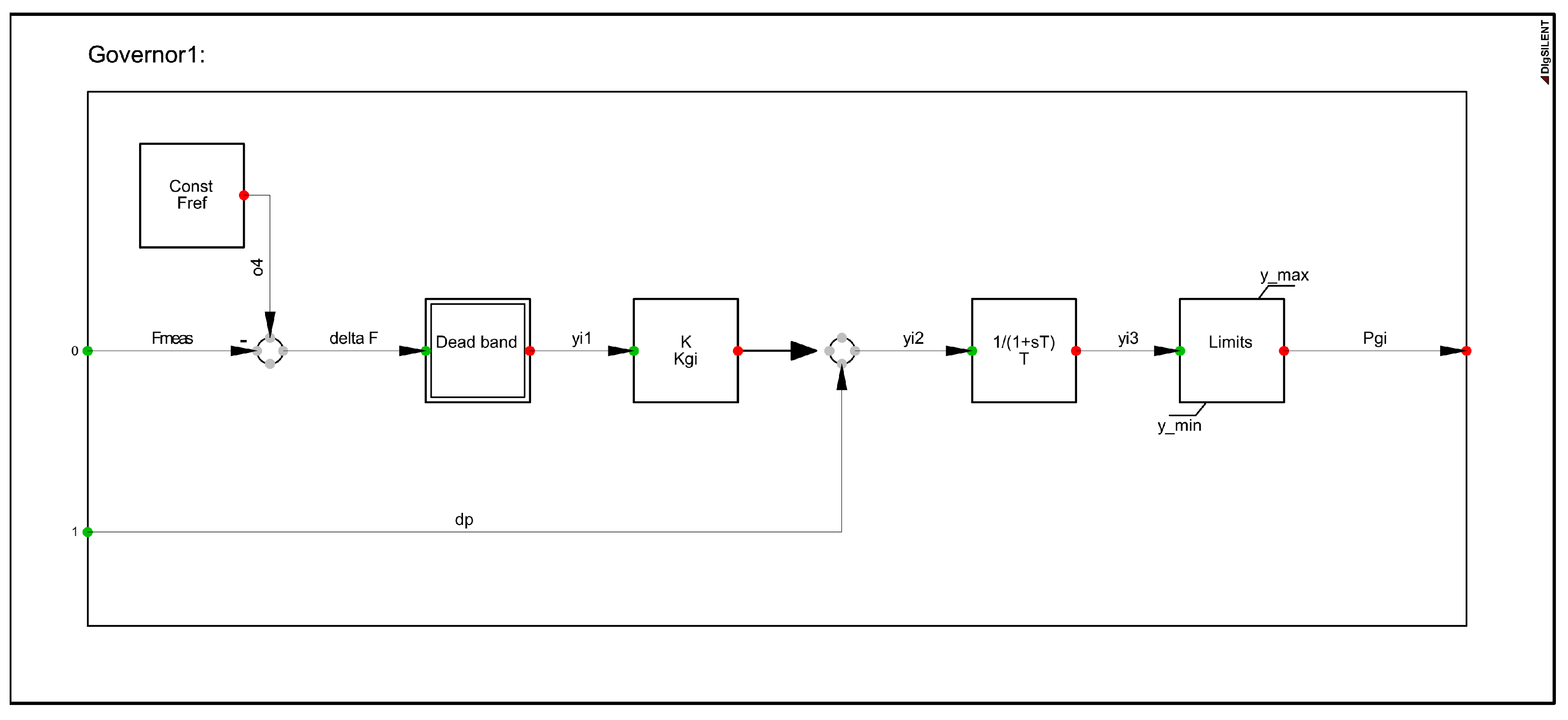
2.1. Turbine–Governor Control System
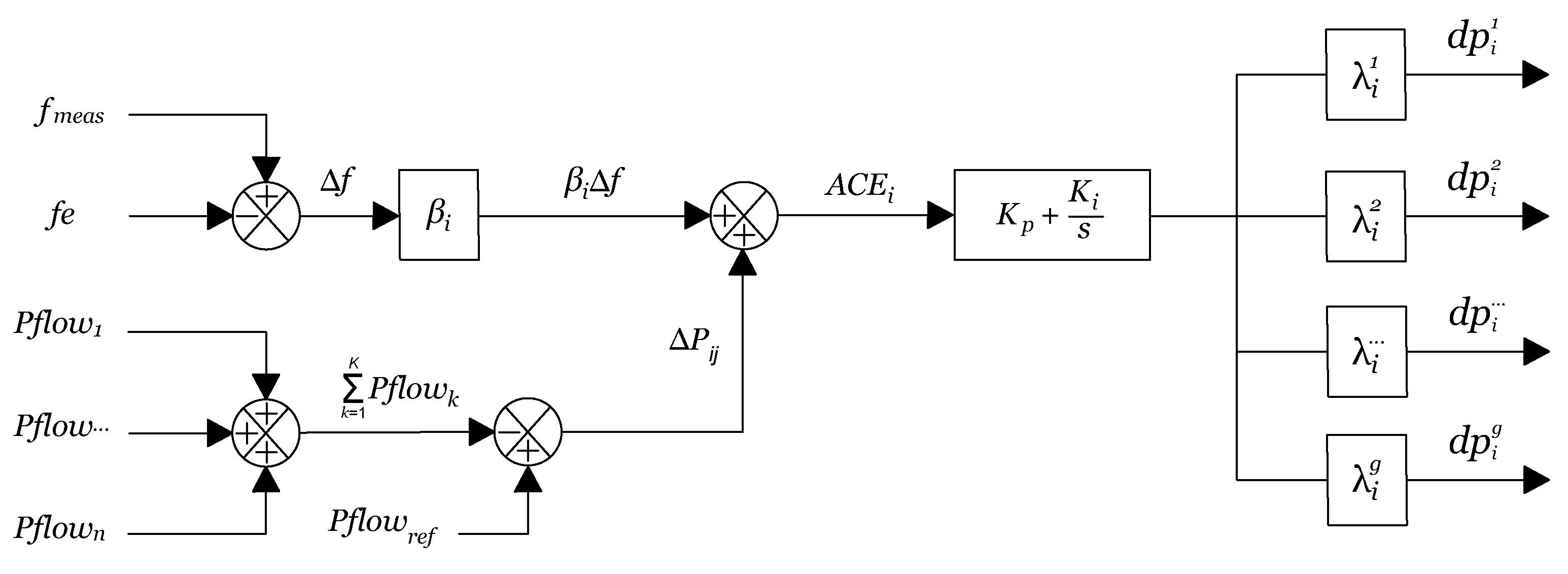
2.2. AGC Algorithm for Two-Area Power System
3. Result and Analysis
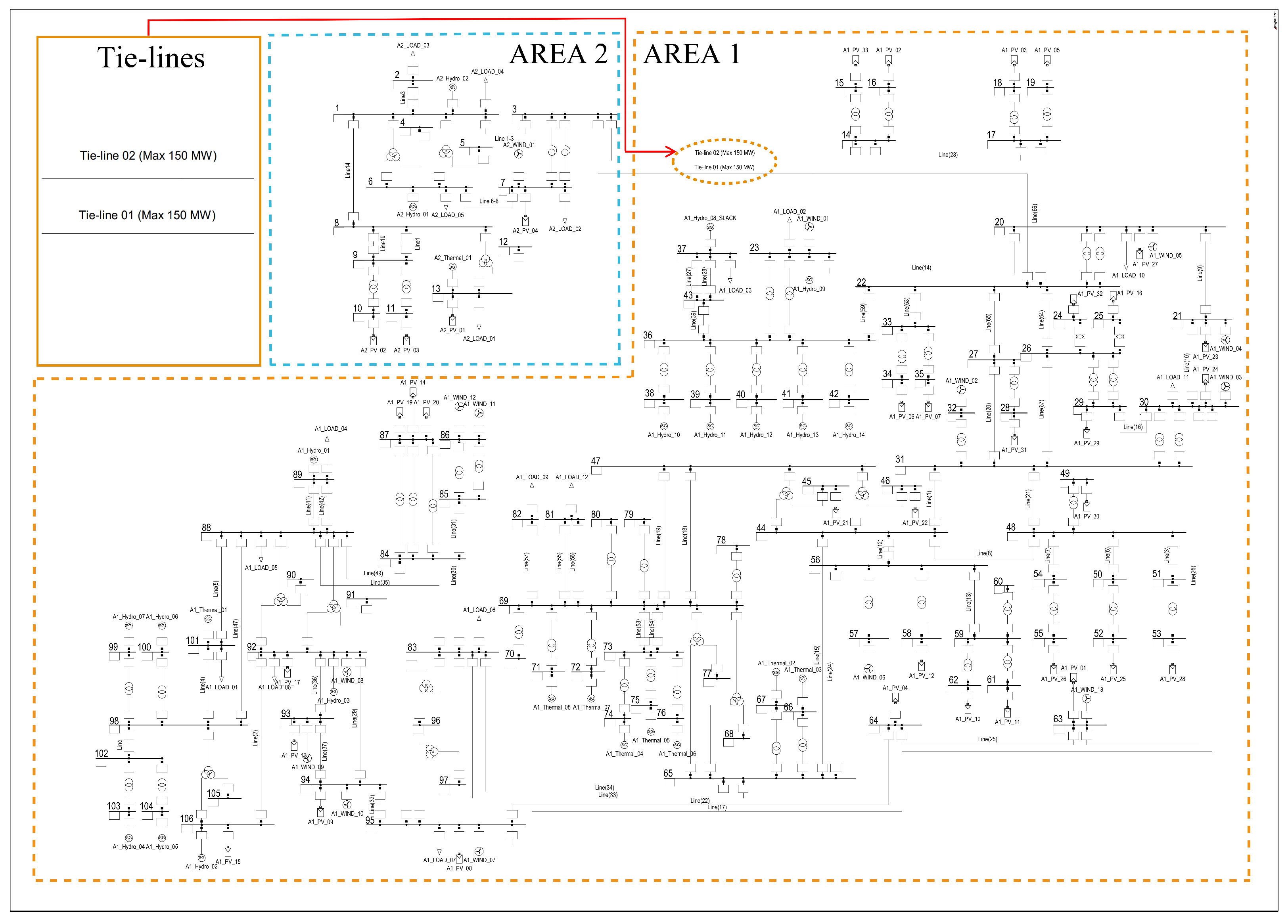
3.1. Network Overview
3.2. Governor and AGC Model in DIgSILENT PowerFactory
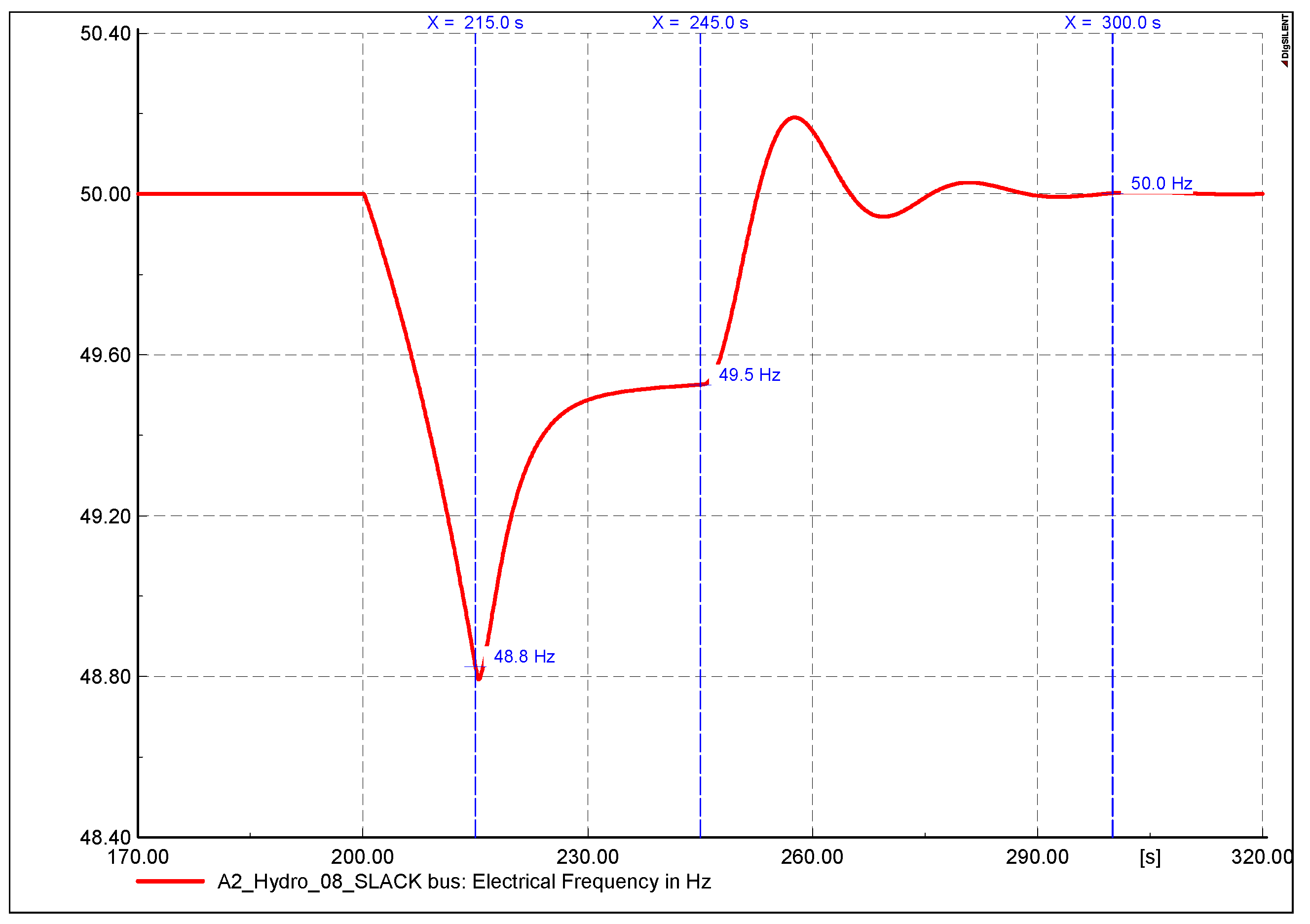
3.3. Simulation Results
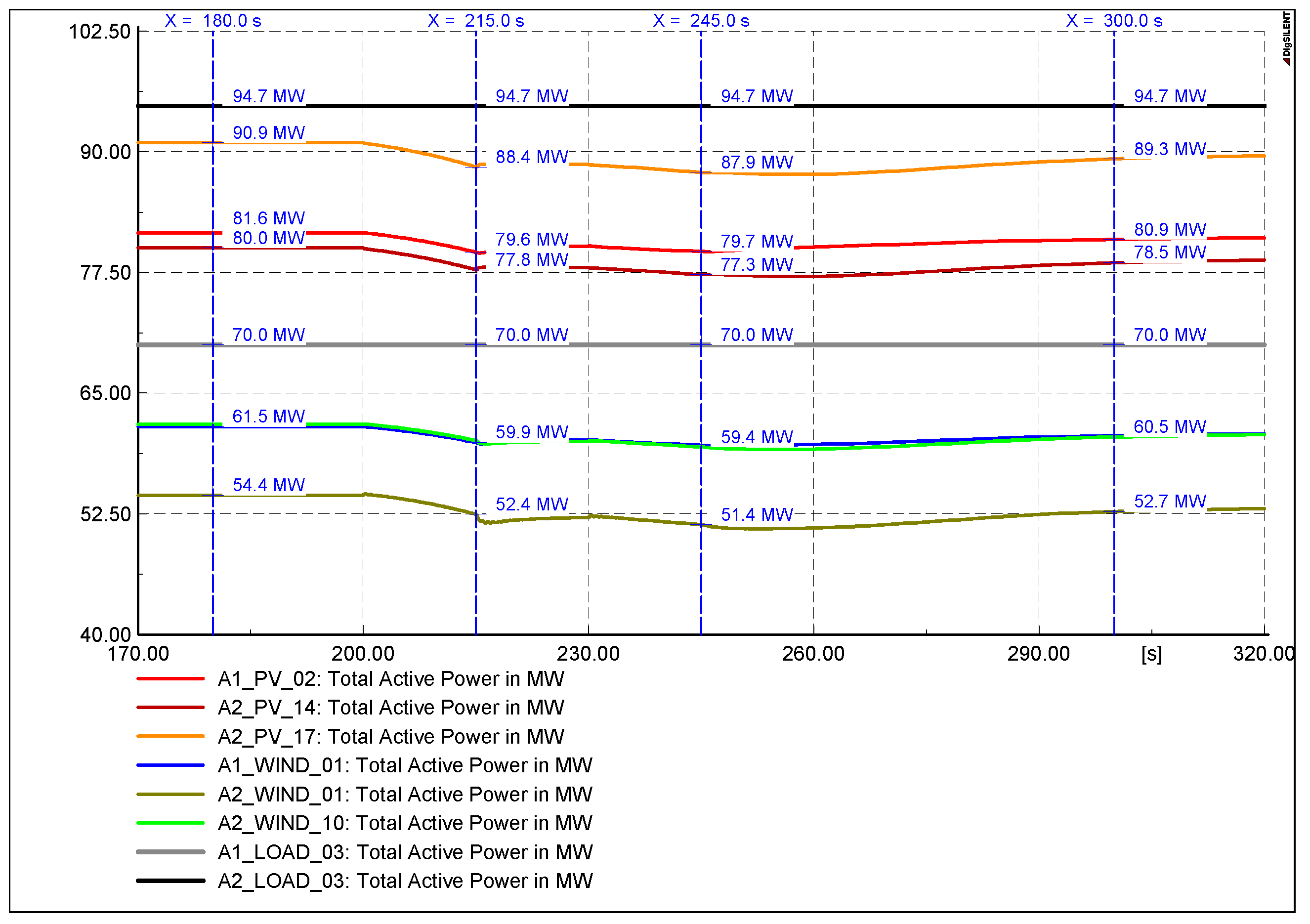
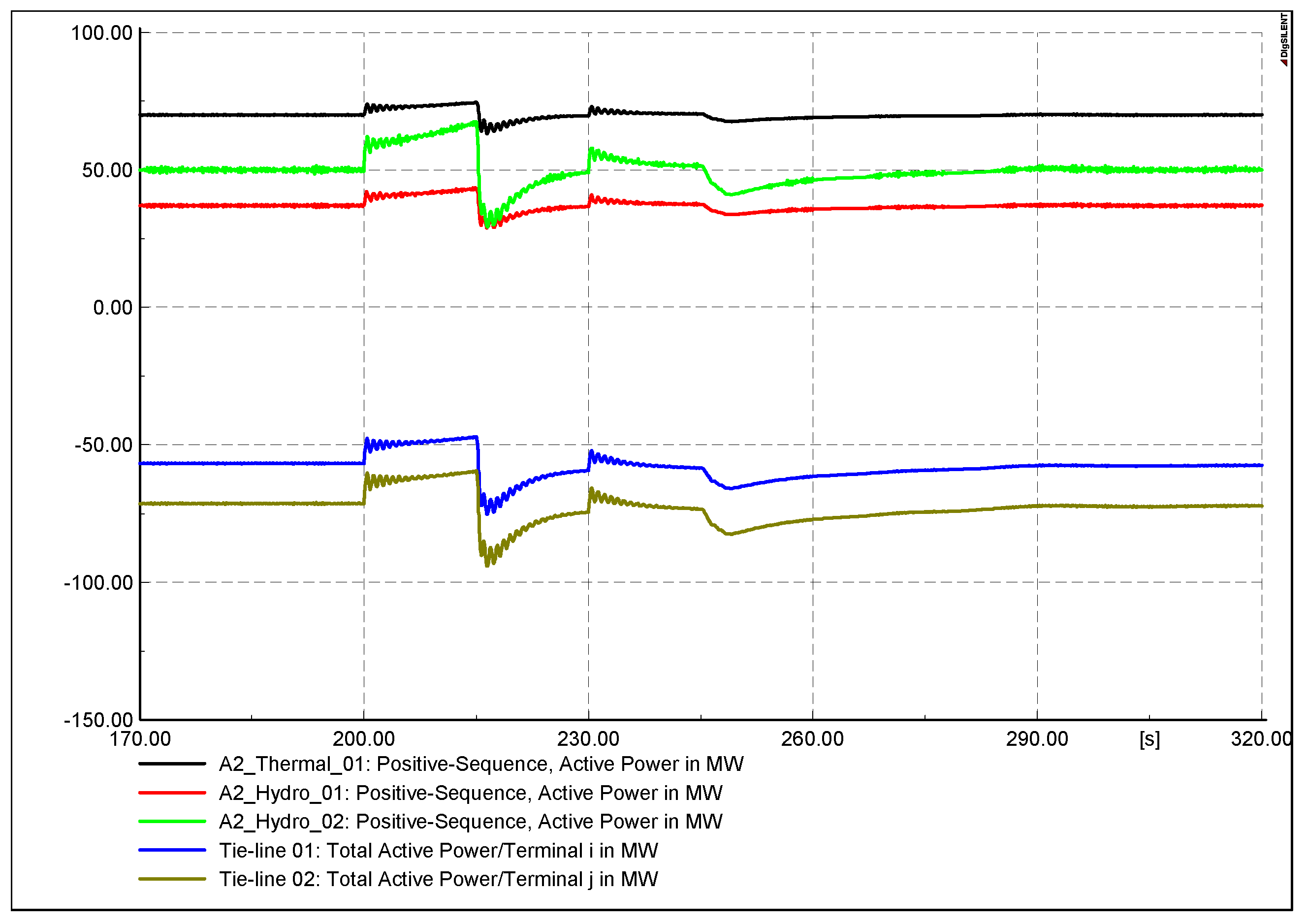
3.3.1. Scenario 1: Reduction in Generating Capacity of Solar Power Plants in Area 1
3.3.2. Scenario 2: Reduced Power-Generation Capacity of Solar Power Plants and Frequency-Controlled Generator in Area 1—Forcing Shutdown due to Problems
4. Conclusions
- Control of the power flow on the transmission lines in a given area to ensure that it is not overloaded.
- Experiment with a larger system model that is divided into more areas. In addition to the principle of geographical division, it is necessary to study the scenario of dividing a large area into many small areas according to internal lines that are often overloaded.
- Apply advanced control strategies such as adaptive control, machine-learning-based approaches, and artificial intelligence to the AGC system to make monitoring and control capabilities more flexible.
- Combine the AGC model with models of the electricity market (economic dispatch) and auxiliary services in the power system.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Acronyms
| RES | renewable energy source |
| AGC | automatic generation control |
| LFC | load frequency control |
| IEA | International Energy Agency |
References
- International Energy Agency (IEA). Renewables 2023; IEA: Paris, France, 2024; p. 141. [Google Scholar]
- Imperial College Business School; International Energy Agency. ASEAN Renewables: Opportunities and Challenges; International Energy Agency: Paris, France, 2023. [Google Scholar]
- Deputy Prime Minister of Vietnam. Decision 500/QD-TTg—The Power Development Plan VIII; Prime Minister of Vietnam: Hanoi, Vietnam, 2023. [Google Scholar]
- Le, L.H.; Le, N.K. A thorough comparison of optimization-based and stochastic methods for determining hosting capacity of low voltage distribution network. Electr. Eng. 2023, 106, 385–406. [Google Scholar]
- Hieu, N.H.; Lam, L.H. Using double fed induction generator to enhance voltage stability and solving economic issue. In Proceedings of the 2016 IEEE International Conference on Sustainable Energy Technologies (ICSET), Hanoi, Vietnam, 14–16 November 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 374–378. [Google Scholar]
- Liang, X.; Andalib-Bin-Karim, C. Harmonics and mitigation techniques through advanced control in grid-connected renewable energy sources: A review. IEEE Trans. Ind. Appl. 2018, 54, 3100–3111. [Google Scholar] [CrossRef]
- Soleimanisardoo, A.; Kazemi-Karegar, H. A Protection Strategy for MV Distribution Networks with Embedded Inverter-based DGs. Adv. Electr. Comput. Eng. 2022, 22. [Google Scholar] [CrossRef]
- Du, P.; Matevosyan, J. Forecast system inertia condition and its impact to integrate more renewables. IEEE Trans. Smart Grid 2017, 9, 1531–1533. [Google Scholar] [CrossRef]
- Kundur, P.S.; Malik, O.P. Power System Stability and Control; McGraw-Hill Education: New York, NY, USA, 2022. [Google Scholar]
- Peddakapu, K.; Mohamed, M.R.; Srinivasarao, P.; Arya, Y.; Leung, P.K.; Kishore, D.J.K. A state-of-the-art review on modern and future developments of AGC/LFC of conventional and renewable energy-based power systems. Renew. Energy Focus 2022, 43, 146–171. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Iqbal, M.; Shahzad, S.; Muqeet, H.A.; Shahzad, M.; Hussain, M.M. Load frequency control (LFC) strategies in renewable energy-based hybrid power systems: A review. Energies 2022, 15, 3488. [Google Scholar] [CrossRef]
- Çelik, E.; Öztürk, N.; Arya, Y.; Ocak, C. (1 + PD)-PID cascade controller design for performance betterment of load frequency control in diverse electric power systems. Neural Comput. Appl. 2021, 33, 15433–15456. [Google Scholar] [CrossRef]
- Ali, G.; Aly, H.; Little, T. Automatic Generation Control of a Multi-Area Hybrid Renewable Energy System Using a Proposed Novel GA-Fuzzy Logic Self-Tuning PID Controller. Energies 2024, 17, 2000. [Google Scholar] [CrossRef]
- Mansour, S.; Badr, A.O.; Attia, M.A.; Sameh, M.A.; Kotb, H.; Elgamli, E.; Shouran, M. Fuzzy logic controller equilibrium base to enhance AGC system performance with renewable energy disturbances. Energies 2022, 15, 6709. [Google Scholar] [CrossRef]
- Debnath, M.K.; Agrawal, R.; Tripathy, S.R.; Choudhury, S. Artificial neural network tuned PID controller for LFC investigation including distributed generation. Int. J. Numer. Model. Electron. Netw. Devices Fields 2020, 33, e2740. [Google Scholar] [CrossRef]
- Abo-Elyousr, F.K.; Abdelaziz, A.Y. A novel modified robust load frequency control for mass-less inertia photovoltaics penetrations via hybrid PSO-Woa Approach. Electr. Power Components Syst. 2019, 47, 1744–1758. [Google Scholar] [CrossRef]
- Wang, J.; Sun, Y. Load Frequency Active Disturbance Rejection Control Based on Improved Particle Swarm Optimization. Electronics 2024, 13, 1268. [Google Scholar] [CrossRef]
- Rasolomampionona, D.D.; Połecki, M.; Zagrajek, K.; Wróblewski, W.; Januszewski, M. A Comprehensive Review of Load Frequency Control Technologies. Energies 2024, 17, 2915. [Google Scholar] [CrossRef]
- Alam, M.S.; Chowdhury, T.A.; Dhar, A.; Al-Ismail, F.S.; Choudhury, M.; Shafiullah, M.; Hossain, M.I.; Hossain, M.A.; Ullah, A.; Rahman, S.M. Solar and wind energy integrated system frequency control: A critical review on recent developments. Energies 2023, 16, 812. [Google Scholar] [CrossRef]
- Chang-Chien, L.R.; Lin, W.T.; Yin, Y.C. Enhancing frequency response control by DFIGs in the high wind penetrated power systems. IEEE Trans. Power Syst. 2010, 26, 710–718. [Google Scholar]
- Irfan, M.; Iqbal, J.; Iqbal, A.; Iqbal, Z.; Riaz, R.A.; Mehmood, A. Opportunities and challenges in control of smart grids–Pakistani perspective. Renew. Sustain. Energy Rev. 2017, 71, 652–674. [Google Scholar] [CrossRef]
- Ray, P.K.; Mohanty, A. A robust firefly–swarm hybrid optimization for frequency control in wind/PV/FC based microgrid. Appl. Soft Comput. 2019, 85, 105823. [Google Scholar] [CrossRef]
- Alqahtani, S.; Shaher, A.; Garada, A.; Cipcigan, L. Impact of the high penetration of renewable energy sources on the frequency stability of the Saudi grid. Electronics 2023, 12, 1470. [Google Scholar] [CrossRef]
- Gonzalez-Longatt, F.M.; Rueda, J.L. PowerFactory Applications for Power System Analysis; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Machowski, J.; Lubosny, Z.; Bialek, J.W.; Bumby, J.R. Power System Dynamics: Stability and Control; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- The Ministry of Industry and Trade. Circular No. 25/2016/TT-BCT Regulation on Electricity Transmission System; Petrovietnam Power Corporation: Hanoi, Vietnam, 2016. [Google Scholar]
- Neplan AG. Turbine–Governor Models, Standard Dynamic Turbine–Governor Systems in NEPLAN Power System Analysis Tool; Technical Report; Neplan AG: Küsnacht, Switzerland, 2013. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area 1 | Area 2 | |||
|---|---|---|---|---|
| No. | Rate Capacity [MW] | No. | Rate Capacity [MW] | |
| Transmission lines | 54 | _ | 6 | _ |
| Transmission tie-lines | 02 | 300 | 02 | 300 |
| Thermal power plant | 08 | 3950 | 01 | 210 |
| Hydropower plant | 14 | 1950 | 02 | 450 |
| Wind power plant | 13 | 570 | 01 | 60 |
| Solar power plant | 33 | 1800 | 04 | 190 |
| Block | Represent | Value |
|---|---|---|
| Reference frequency | 50 | |
| Dead band | Dead band of governor | 0.05 |
| Inverse droop | 20 | |
| Governor time constant | Hydro turbine: 1 Steam turbine: 0.1 | |
| Limits | Limits turbine capacity | y _max: 1 y _min: 0 |
| Block | Represent | Value | |
|---|---|---|---|
| Area 1 | Area 2 | ||
| Reference frequency | 50 | 50 | |
| Constant Bias | Frequency bias | 25 | 20 |
| Preset power area exchange | 125 | 125 | |
| in PI controller | 0.5 | 0.5 | |
| in PI controller | 100 | 100 | |
| Participation coefficient of generator g in area i | 0.6 (0.8 for A1_Hydro_01) | 0.6 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lam, L.H.; Nam, L.K.; Dung, N.K.T.; Hieu, N.H. Two-Area Automatic Generation Control for Power Systems with Highly Penetrating Renewable Energy Sources. Electronics 2024, 13, 2907. https://doi.org/10.3390/electronics13152907
Lam LH, Nam LK, Dung NKT, Hieu NH. Two-Area Automatic Generation Control for Power Systems with Highly Penetrating Renewable Energy Sources. Electronics. 2024; 13(15):2907. https://doi.org/10.3390/electronics13152907
Chicago/Turabian StyleLam, Le Hong, Le Khoa Nam, Nguyen Khac Tien Dung, and Nguyen Huu Hieu. 2024. "Two-Area Automatic Generation Control for Power Systems with Highly Penetrating Renewable Energy Sources" Electronics 13, no. 15: 2907. https://doi.org/10.3390/electronics13152907
APA StyleLam, L. H., Nam, L. K., Dung, N. K. T., & Hieu, N. H. (2024). Two-Area Automatic Generation Control for Power Systems with Highly Penetrating Renewable Energy Sources. Electronics, 13(15), 2907. https://doi.org/10.3390/electronics13152907