
A Novel Repeat PI Decoupling Control Strategy with Linear Active Disturbance Rejection for a Three-Level Neutral-Point-Clamped Active Power Filter with an LCL Filter


Abstract
:1. Introduction
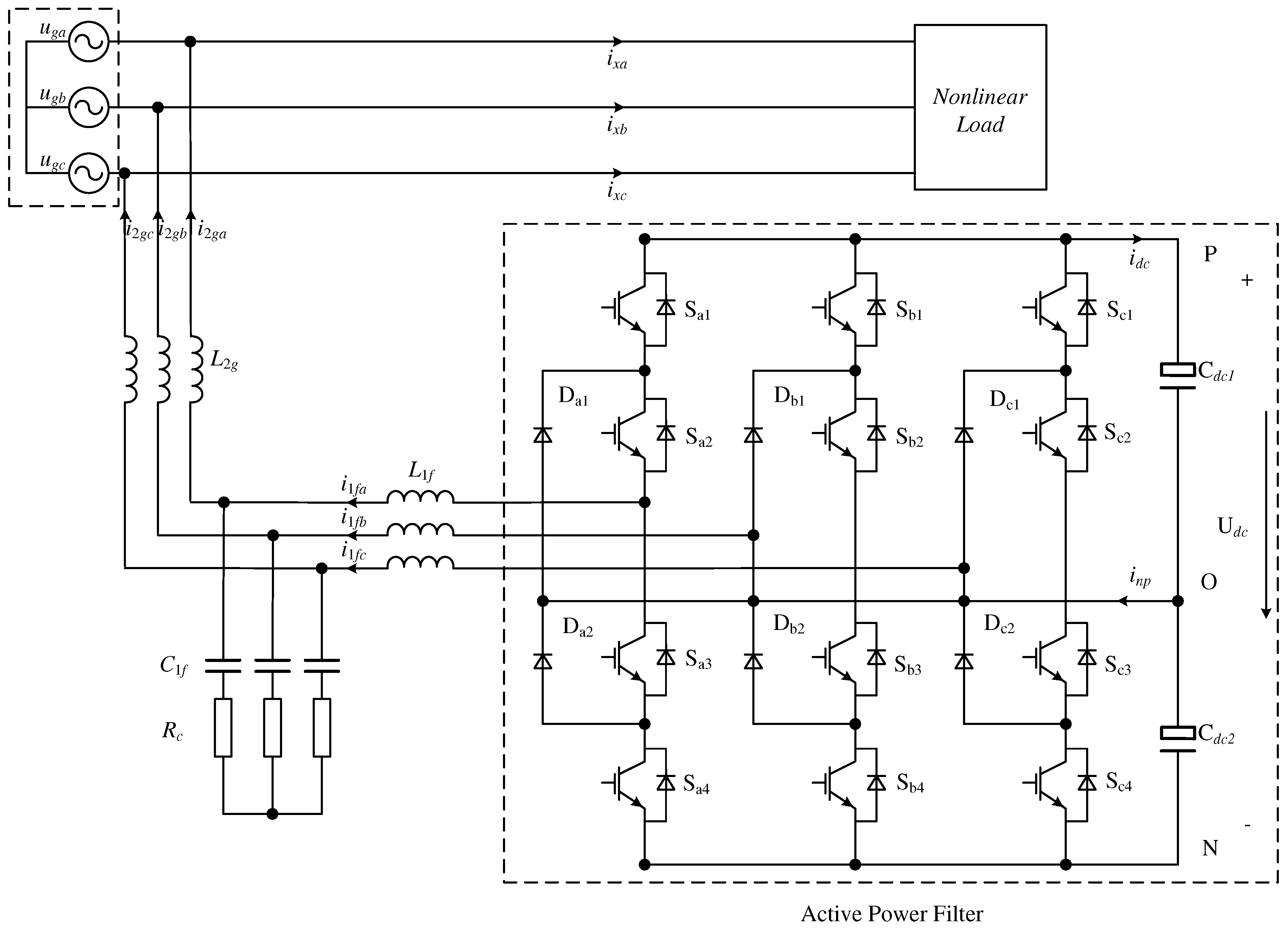
2. Mathematical Model of APF with an LCL Filter
Analysis of the LCL Filter
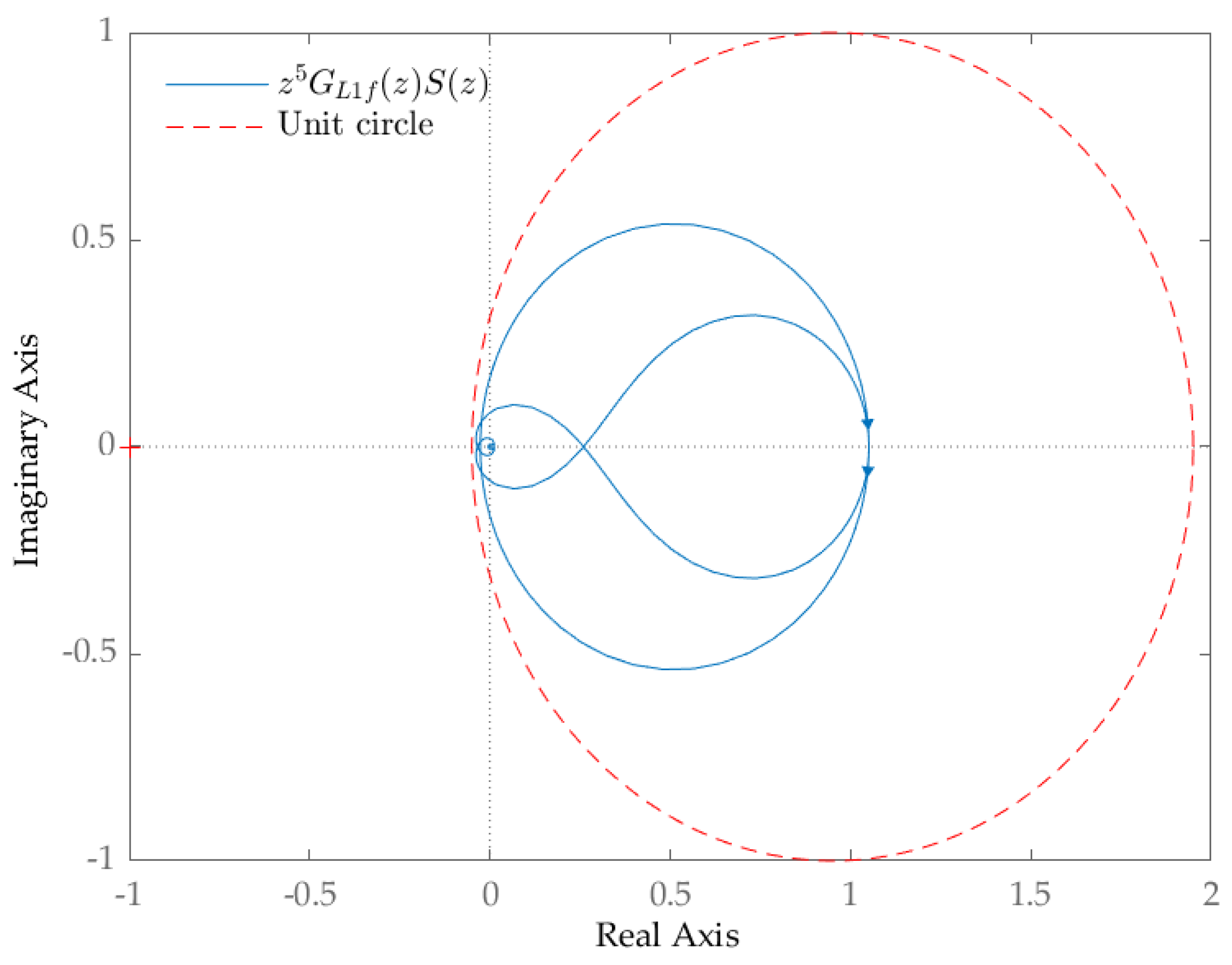
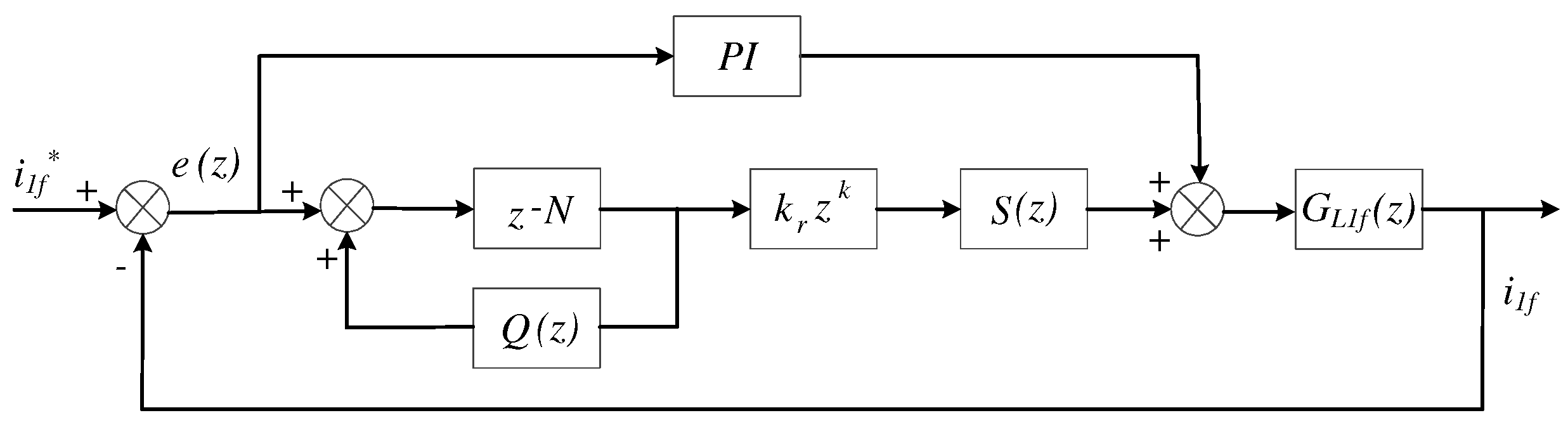
3. Current Inner-Loop Controller Design and Analysis
3.1. Design of the Repeat PI Controller
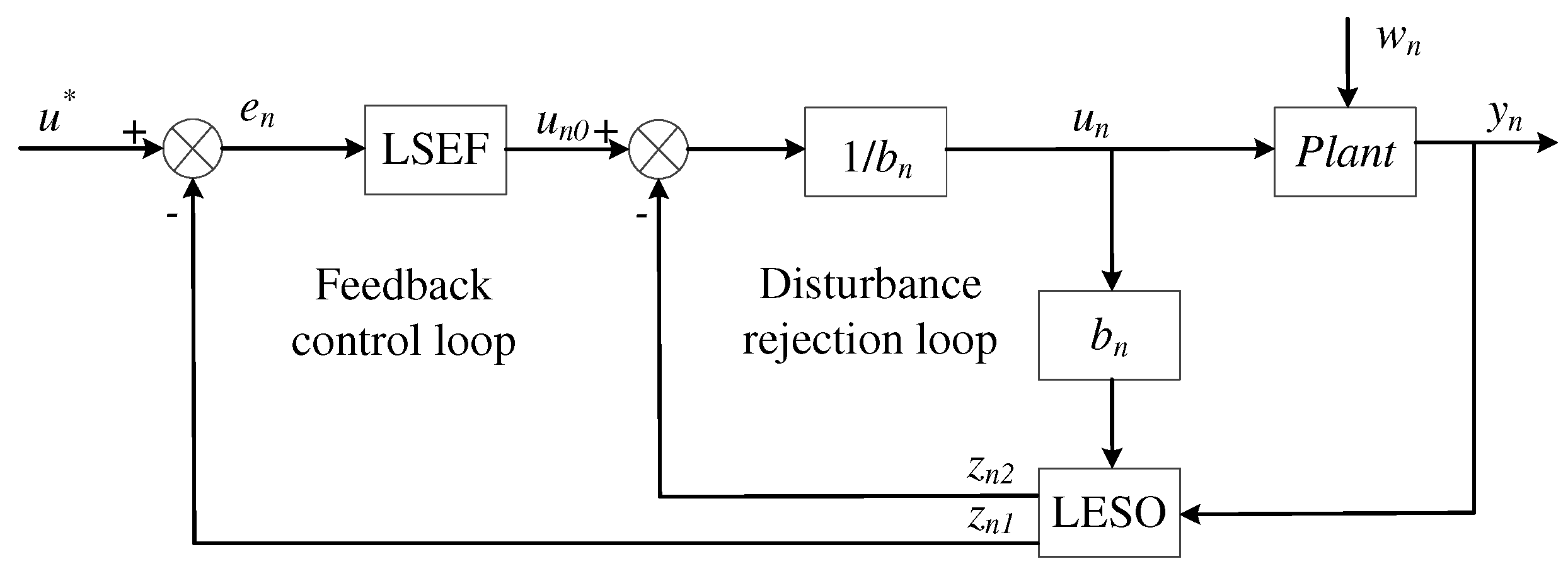
3.2. Design of the LADRC
3.2.1. Design of LESO
3.2.2. Design of LSEF
3.3. Design of the Repeat PI–LADRC
4. Voltage Outer-Loop Design and Analysis
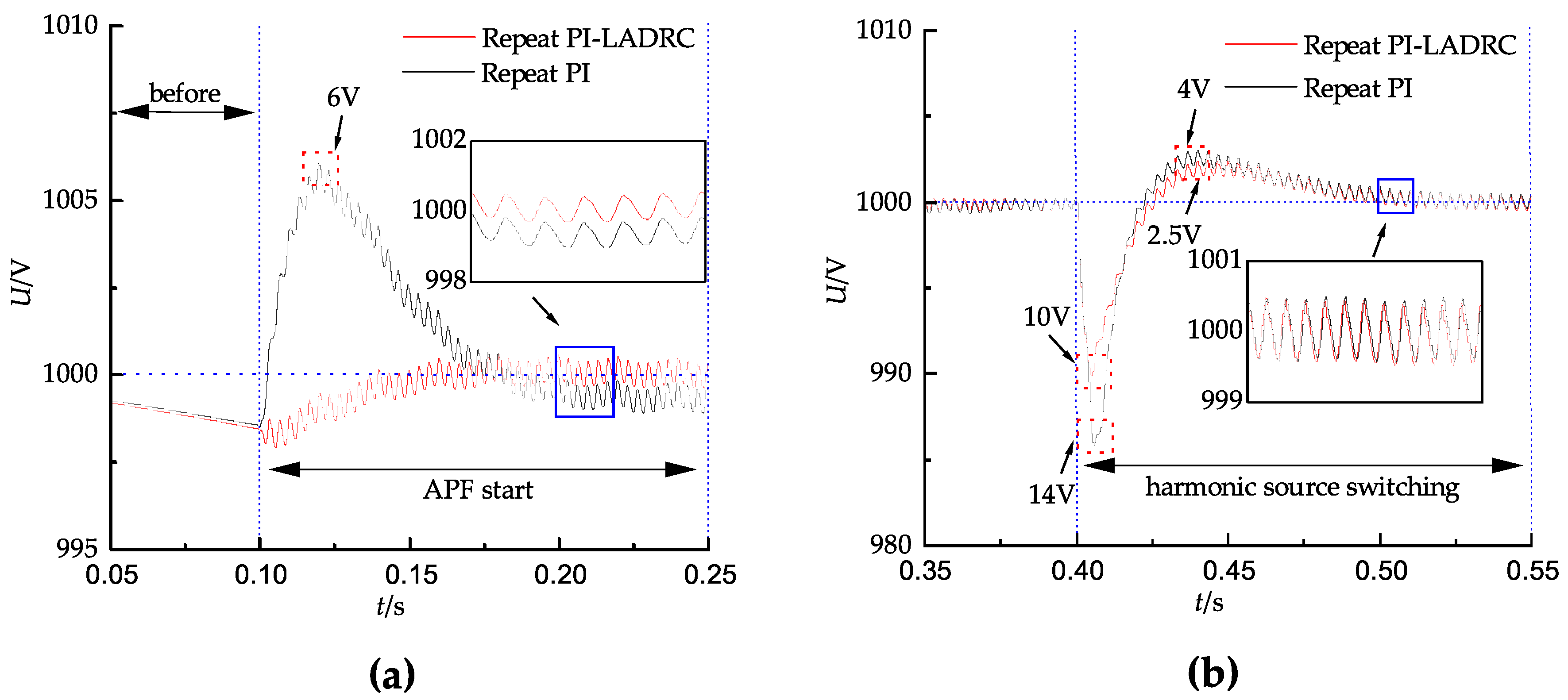
5. Simulation Verification
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Alasali, F.; Nusair, K.; Foudeh, H.; Holderbaum, W.; Vinayagam, A.; Aziz, A. Modern optimal controllers for hybrid active power filter to minimize harmonic distortion. Electronics 2022, 11, 1453. [Google Scholar] [CrossRef]
- Zhou, X.; Cui, Y.; Ma, Y. Fuzzy linear active disturbance rejection control of injection hybrid active power filter for medium and high voltage distribution network. IEEE Access 2021, 9, 8421–8432. [Google Scholar] [CrossRef]
- Li, H.; Qu, Y.; Lu, J.; Li, S. A composite strategy for harmonic compensation in standalone inverter based on linear active disturbance rejection control. Energies 2019, 12, 2618. [Google Scholar] [CrossRef]
- Das, S.R.; Ray, P.K.; Sahoo, A.K.; Ramasubbareddy, S.; Babu, T.K.; Kumar, N.M.; Elavarasan, R.M.; Mihet-Popa, L. A comprehensive survey on different control strategies and applications of active power filters for power quality improvement. Energies 2021, 14, 4589. [Google Scholar] [CrossRef]
- Ghoudelbourk, S.; Azar, A.T.; Dib, D. Three-level (NPC) shunt active power filter based on fuzzy logic and fractional-order PI controller. Int. J. Autom. Control 2021, 15, 149–169. [Google Scholar] [CrossRef]
- Kashif, M.; Hossain, M.J.; Zhuo, F.; Gautam, S. Design and implementation of a three-level active power filter for harmonic and reactive power compensation. Electr. Power Syst. Res. 2018, 165, 144–156. [Google Scholar] [CrossRef]
- Hoon, Y.; Mohd Radzi, M.A.; Hassan, M.K.; Mailah, N.F. Control algorithms of shunt active power filter for harmonics mitigation: A review. Energies 2017, 10, 2038. [Google Scholar] [CrossRef]
- Mhawi, E.; Daniyal, H.; Sulaiman, M.H. Advanced techniques in harmonic suppression via active power filter: A review. Int. J. Power Electron. Drive Syst 2015, 6, 185–195. [Google Scholar] [CrossRef]
- Zhang, M.; Wen, J.M.; Wu, S.Y.; Guan, Y.C.; Feng, C.S.; Lu, J.H. Dual-loop control of hybrid active power filter. Electr. Mach. Control 2023, 27, 119–126. [Google Scholar]
- Zeng, Z.; Yang, J.; Yu, N. Research on PI and repetitive control strategy for Shunt Active Power Filter with LCL-filter. In Proceedings of the 7th International Power Electronics and Motion Control Conference, Harbin, China, 2–5 June 2012; Volume 4, pp. 2833–2837. [Google Scholar]
- Abouloifa, A.; Giri, F.; Lachkar, I.; Chaoui, F.Z.; Kissaoui, M.; Abouelmahjoub, Y. Cascade nonlinear control of shunt active power filters with average performance analysis. Control Eng. Pract. 2014, 26, 211–221. [Google Scholar] [CrossRef]
- Li, X.; Li, B. A decoupling control method for shunt hybrid active power filter based on generalized inverse system. J. Electr. Comput. Eng. 2017, 2017, 5232507. [Google Scholar] [CrossRef]
- Khajehoddin, S.A.; Karimi-Ghartemani, M.; Jain, P.K.; Bakhshai, A. A Control Design Approach for Three-Phase Grid-Connected Renewable Energy Resources. IEEE Trans. Sustain. Energy 2011, 2, 423–432. [Google Scholar] [CrossRef]
- Zhou, S.; Liu, J.; Zhou, L.; Zhang, Y. DQ current control of voltage source converters with a decoupling method based on preprocessed reference current feed-forward. IEEE Trans. Power Electron. 2017, 32, 8904–8921. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Liu, Y.; Zeng, L.; Pan, H.; Yang, T. Research of Active Power Filter Using Improved Backstepping Active disturbance rejection control strategy. In Proceedings of the China Automation Congress, Beijing, China, 22–24 October 2021; pp. 8001–8006. [Google Scholar]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 4989–4996. [Google Scholar]
- Qin, D.; Zeng, G. Research on Parallel Shunt Hybrid Active Power Filter with repetitive LADRC algorithm. In Proceedings of the International Future Energy Electronics Conference, Taipei, Taiwan, 1–4 November 2015; Volume 6, pp. 1–6. [Google Scholar]
- Wu, H.; Wang, Y.; Liu, B.; Chen, L.; Pei, G. Research and improvement of current control strategy of active power filter. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Changchun, China, 21–23 August 2020; Volume 619, p. 012069. [Google Scholar]
- Zhang, H.; Xian, J.; Shi, J.; Wu, S.; Ma, Z. High performance decoupling current control by linear extended state observer for three-phase grid-connected inverter with an LCL filter. IEEE Access. 2020, 8, 13119–13127. [Google Scholar] [CrossRef]
- Feng, Z.; Zhou, X.; Wang, C.; Huang, W.; Chen, Z. LADRC-based grid-connected control strategy for single-phase LCL-type inverters. PLoS ONE 2024, 19, e0303591. [Google Scholar] [CrossRef]
- Benrabah, A.; Xu, D.; Gao, Z. Active disturbance rejection control of LCL-filtered grid-connected inverter using Padé approximation. IEEE Trans. Ind. Appl. 2018, 54, 6179–6189. [Google Scholar] [CrossRef]
- Zhou, X.; Xu, H.; Ma, Y.; Hu, Y. Research on Control Strategy Based on Second-order Linear Active Disturbance Rejection Control for LCL-type Grid-connected Inverter. In Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation, Guangxi, China, 7–10 August 2022; pp. 864–869. [Google Scholar]
- Xu, A.J.; Xie, B.S.; Kan, C.J.; Ji, D.L. An improved inverter-side current feedback control for grid-connected inverters with LCL filters. In Proceedings of the 2015 9th International Conference on Power Electronics and ECCE Asia, Seoul, Republic of Korea, 1–5 June 2015; pp. 984–989. [Google Scholar]
- Pal, B.; Sahu, P.K.; Mohapatra, S. A review on feedback current control techniques of grid-connected PV inverter system with LCL filter. In Proceedings of the 2018 Technologies for Smart-City Energy Security and Power, Bhubaneswar, India, 28–30 March 2018; pp. 1–6. [Google Scholar]
- Ming, L.; Xin, Z.; Kong, X.; Yin, C.; Loh, P.C. Power factor correction and harmonic elimination for LCL-filtered three-level photovoltaic inverter with inverter-side current control. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 3405–3410. [Google Scholar]
- Cai, Y.; He, Y.; Zhou, H.; Liu, Y. Active-damping disturbance-rejection control strategy of LCL grid-connected inverter based on inverter-side-current feedback. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 7183–7198. [Google Scholar] [CrossRef]
- Wang, X.; Wu, C.; Pan, Z.; Tian, L. Inverter-side current control of grid-connected inverter with LCL filter based on fractional-order extended state observation. In Proceedings of the 2021 9th International Conference on Control, Mechatronics and Automation, Belval, Luxembourg, 11–14 November 2021; pp. 55–60. [Google Scholar]
- Tang, Y.; Loh, P.C.; Wang, P.; Choo, F.H.; Gao, F.; Blaabjerg, F. Generalized design of high performance shunt active power filter with output LCL filter. IEEE Tran. Ind. Electron. 2011, 59, 1443–1452. [Google Scholar] [CrossRef]
- Rueffer, B.S. Small-gain conditions and the comparison principle. IEEE Tran. Autom. Control 2010, 55, 1732–1736. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, J.; Ma, Y. Linear active disturbance rejection control of grid-connected photovoltaic inverter based on deviation control principle. Energies 2020, 13, 3790. [Google Scholar] [CrossRef]
- He, G.; Chen, G.; Dong, Y.; Li, G.; Zhang, W. Research on LADRC of grid-connected inverter based on LCCL. Energies 2022, 15, 4686. [Google Scholar] [CrossRef]
- He, Y.; Liu, J.; Tang, J.; Wang, Z.; Zou, Y. Research on control system of DC voltage for active power filters with three-level NPC inverter. In Proceedings of the 2008 Twenty-Third Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 24–28 February 2008; pp. 1048–2334. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Solution | Key Aspect |
|---|---|
| PI control based on d-q coordinate system | The reference signal is changed from AC to DC |
| Repeat and PI compound control | Parallel connection of repeat control and PI to increase the steady-state accuracy |
| Fuzzy control | The decoupling control is realized |
| Generalized inverse system strategy | The dynamic decoupling of APF is realized |
| Feedback linearization theory | The decoupling control of the nonlinear system is realized |
| Feedforword decoupling strategy | The instability caused by the approximate decoupling has been solved |
| Backstepping method and ADRC | Connection of Backstepping method and ADRC to improve the control accuracy and dynamic response of the system |
| RLADRC | Parallel connection of repeat control and LADRC to improve the accuracy of current tracking |
| Deadbeat and RLADRC | Deadbeat control and RLADRC are connected by series, and the current coupling is treated as an internal disturbance, which is compensated by LADRC |
| PI and LESO | High-performance current decoupling is achieved with the fourth-order LESO |
| Parameters | Numerical Value | Parameters | Numerical Value |
|---|---|---|---|
| Grid voltage | 480 V | DC-side capacitance | 23.5 mF |
| Inverter side inductance | 2 mH | Switching frequency | 20 kHz |
| Grid-side inductance | 0.1 mH | Maximum compensation current | 150 A |
| Filter capacitance | 11 uF | 400 | |
| DC-side bus voltage | 1000 V | 1000 | |
| Grid frequency | 50 Hz | 3000 | |
| 40 | 1 |
| Load Current | 84 A | 129 A |
|---|---|---|
| Pre-compensation | 22.36% | 19.25% |
| PI control | 5.15% | 4.68% |
| repeat PI control | 2.74% | 2.6% |
| LADRC control | 3.7% | 3.17% |
| repeat PI–LADRC control | 2.09% | 1.69% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Zhu, L.; Wang, X.; Lv, X.; Wei, H. A Novel Repeat PI Decoupling Control Strategy with Linear Active Disturbance Rejection for a Three-Level Neutral-Point-Clamped Active Power Filter with an LCL Filter. Electronics 2024, 13, 2973. https://doi.org/10.3390/electronics13152973
Gao Y, Zhu L, Wang X, Lv X, Wei H. A Novel Repeat PI Decoupling Control Strategy with Linear Active Disturbance Rejection for a Three-Level Neutral-Point-Clamped Active Power Filter with an LCL Filter. Electronics. 2024; 13(15):2973. https://doi.org/10.3390/electronics13152973
Chicago/Turabian StyleGao, Yifei, Liancheng Zhu, Xiaoyang Wang, Xiaoguo Lv, and Hongshi Wei. 2024. "A Novel Repeat PI Decoupling Control Strategy with Linear Active Disturbance Rejection for a Three-Level Neutral-Point-Clamped Active Power Filter with an LCL Filter" Electronics 13, no. 15: 2973. https://doi.org/10.3390/electronics13152973