Research on Linear Active Disturbance Rejection Control Based on Grid-Forming Distributed Photovoltaics


Abstract
1. Introduction
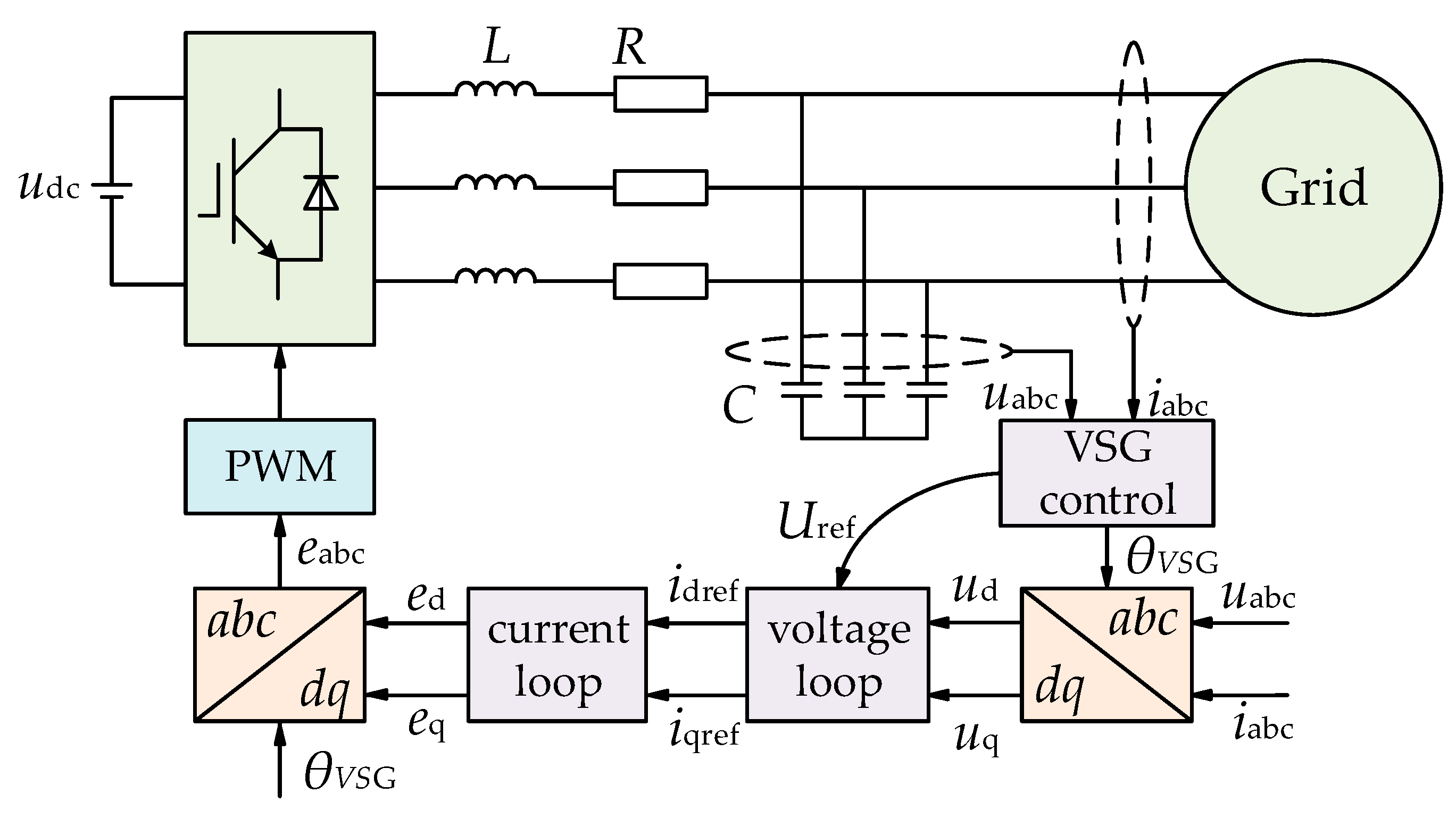
2. VSG Control Based on GFM Converter
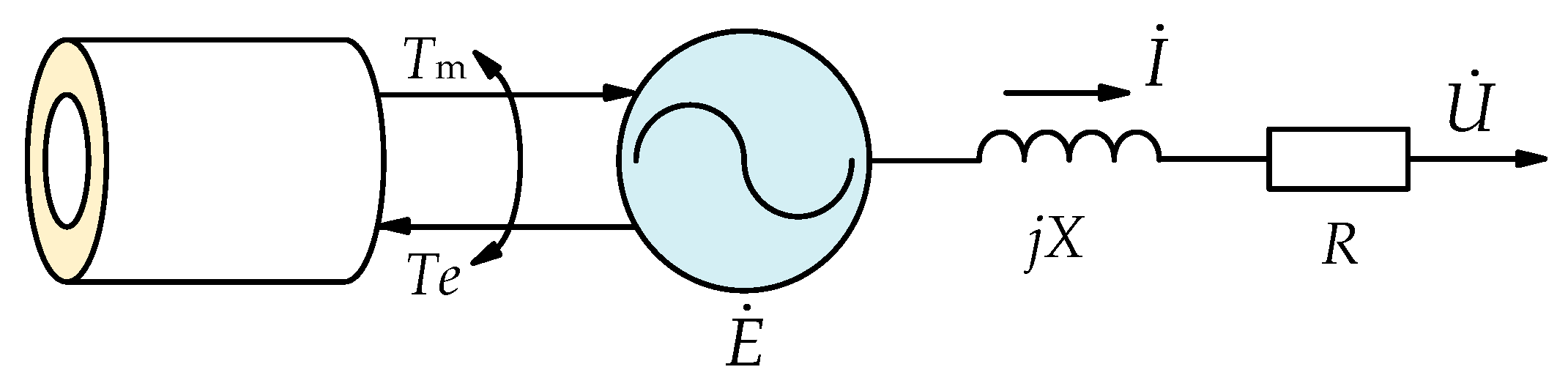
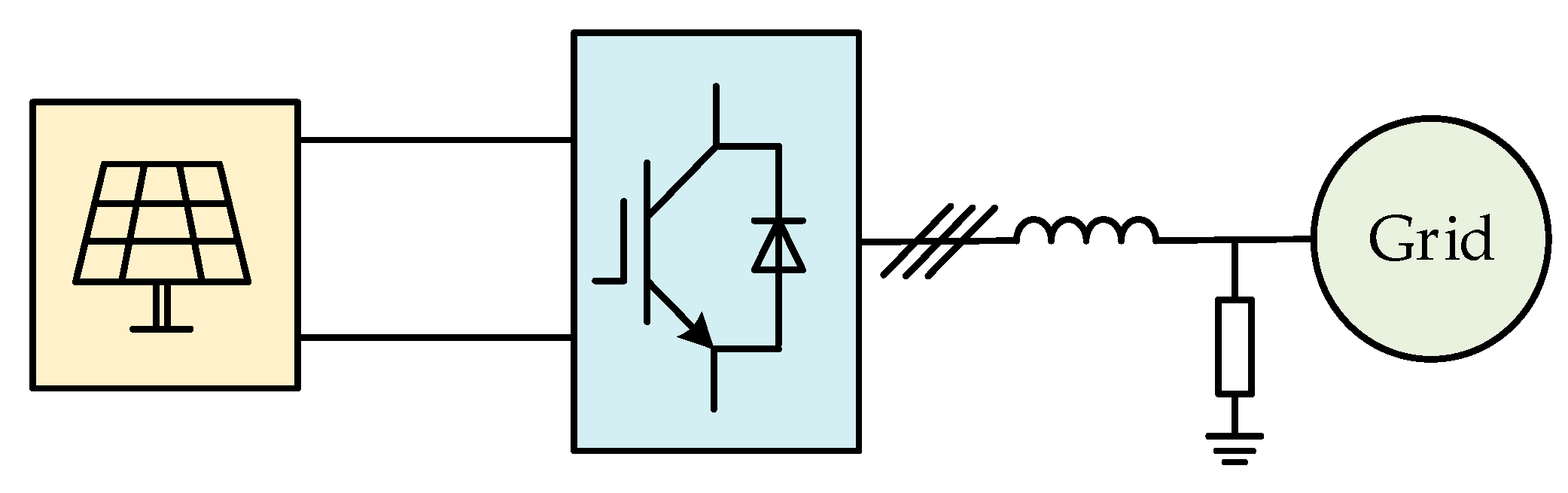
2.1. Control Principle of VSG Based on GFM System
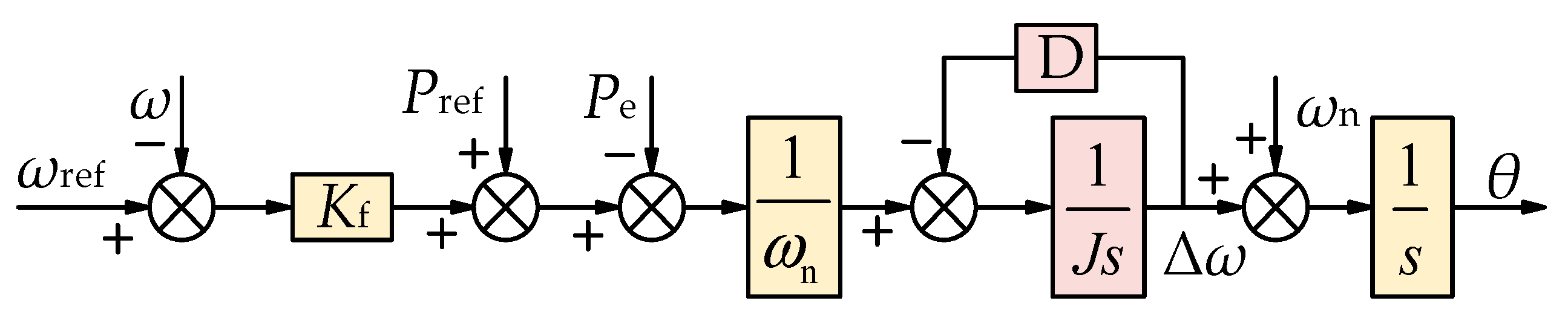
2.2. Principle and Characterization of VSG Control
3. Principle of LADRC for VSG Control Based on GFM Converter
3.1. Active Disturbance Rejection Control
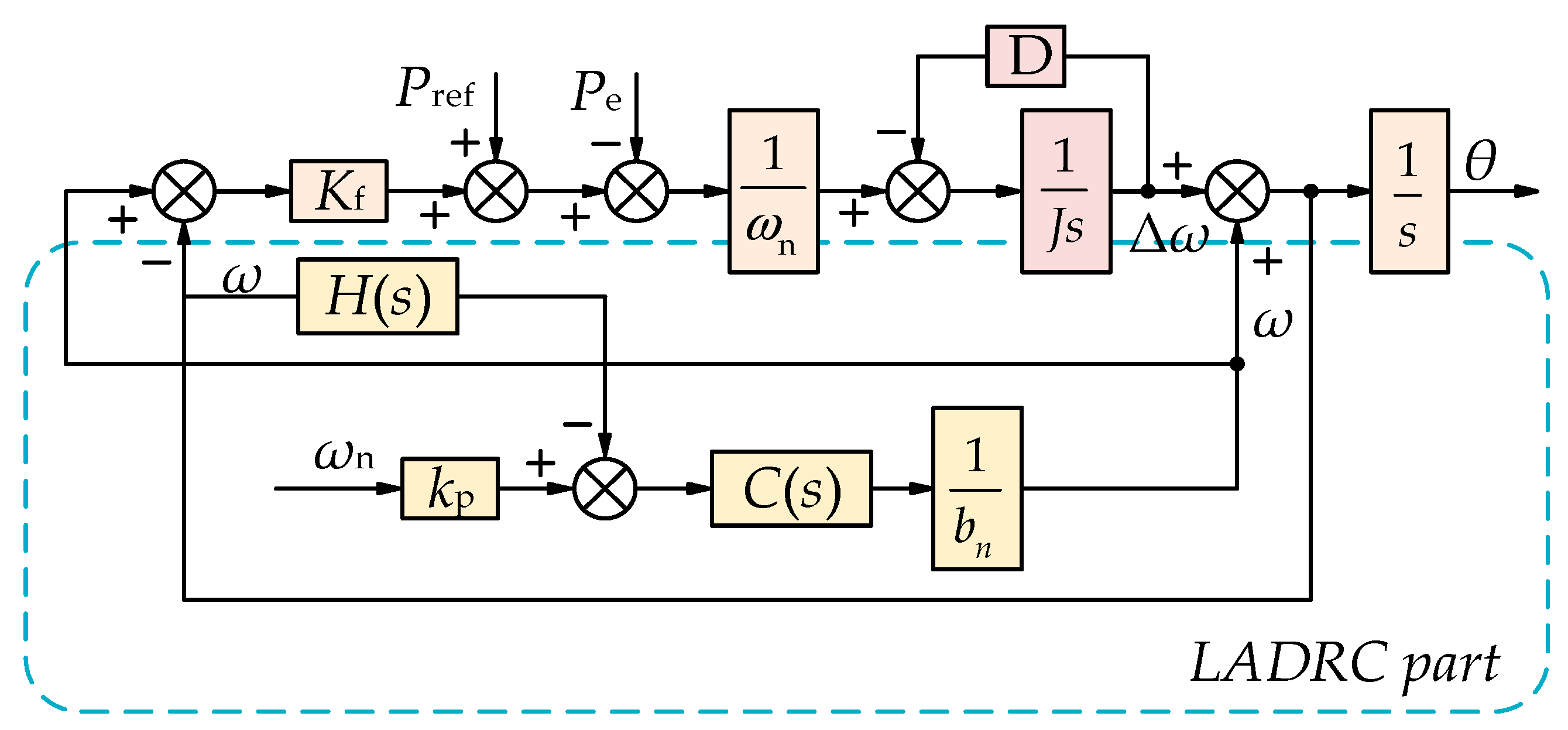
3.2. LADRC Power–Frequency Controller for VSG
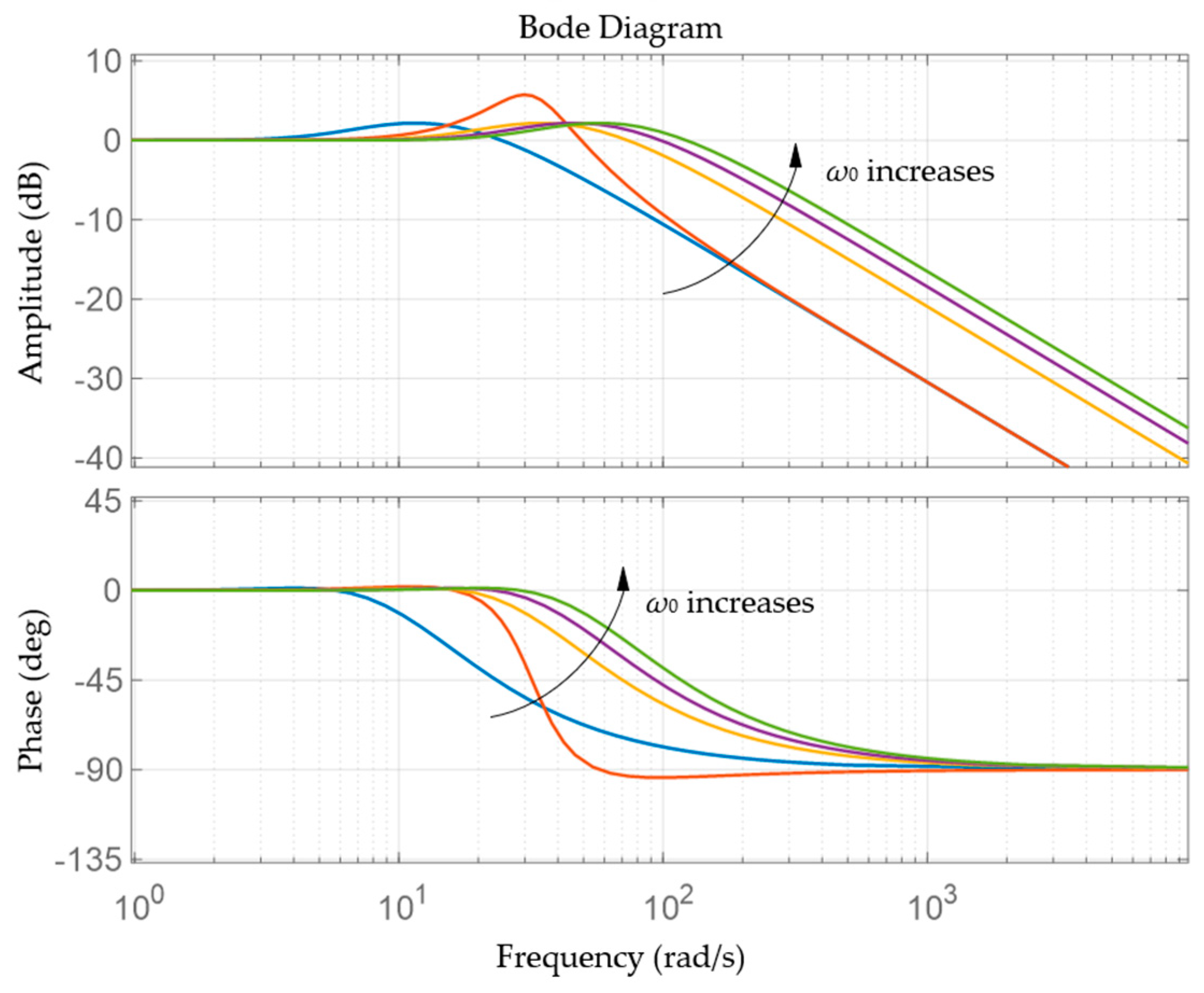
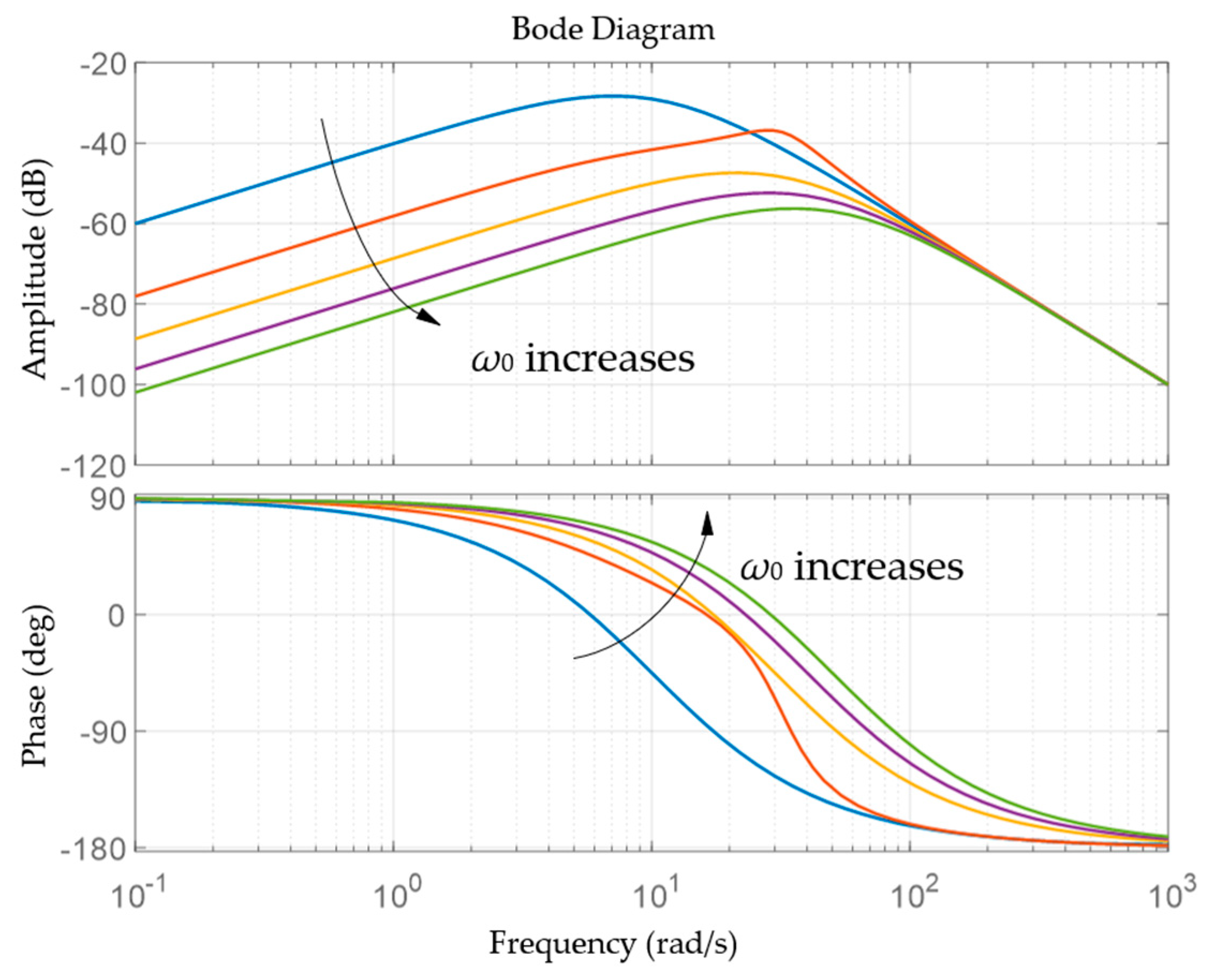
3.3. Parameter Calibration
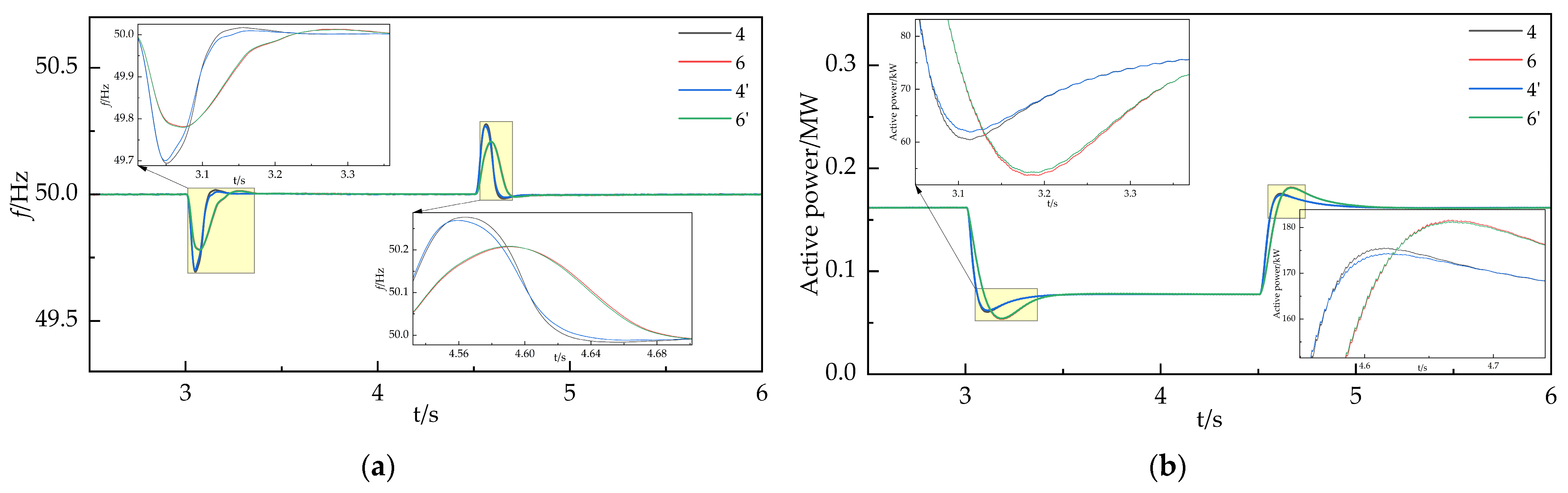
3.4. Simulation Result and Analysis
4. Study of PSO-LADRC Strategy
4.1. Fundamentals of PSO-LADRC Strategy
- 1.
- Particle Position Representation Parameter: In the PSO algorithm, each particle’s state is represented by a d-dimensional vector, which indicates the particle’s current position. The position vector of a particle is defined aswhere xi denotes the position of the i-th particle in d-dimensional space.
- 2.
- Particle Velocity Indicates Search Direction: The velocity of a particle represents the direction in which the particle searches within the d-dimensional space. The velocity vector of a particle is defined aswhere vi denotes the velocity of the i-th particle.
- 3.
- Each Particle Records its Own Best Position and Fitness: Each particle tracks its best found position and the corresponding fitness value. This allows each particle to retain good local solutions. The optimal position vector is denoted aswhere pi denotes the optimal position found by the i-th particle.
- 4.
- Global Optimal Position for the Entire Population: The global optimal position is recorded across all particles in the population. The global optimal position vector is denoted as
- 5.
- Updates Speed and Position Using Current Speed and Historical Information: The speed and position are updated based on the current speed and historical data. The speed update formula is given bywhere w is the inertia weight, balancing the global search and local convergence abilities of the particle swarm; c1 and c2 are the learning factors for individual and collective experiences, respectively; and r1 and r2 are random numbers between 0 and 1.
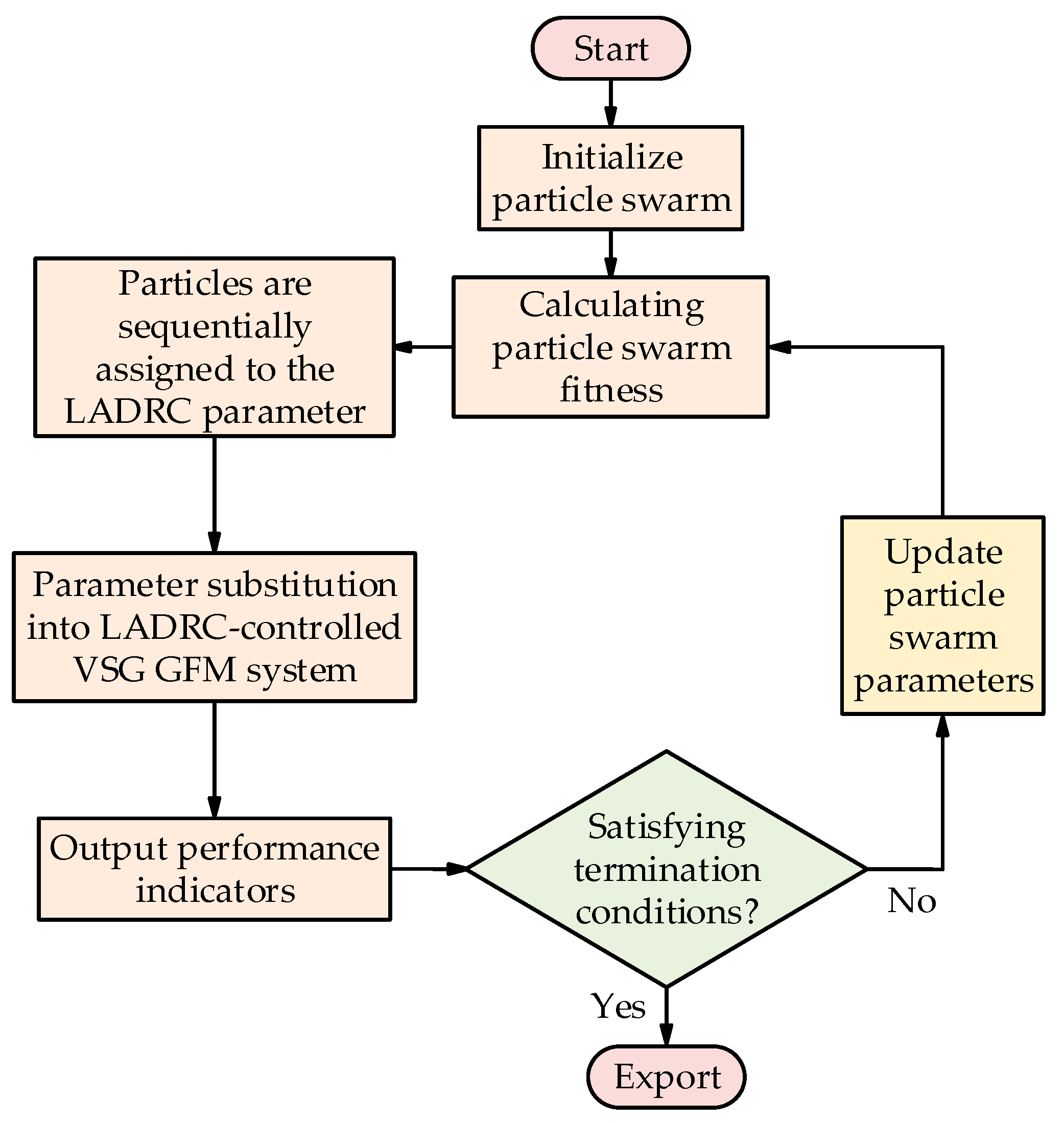
4.2. PSO-LADRC Parameter Calibration
- Initialize Relevant Parameters: Set the particle swarm’s size, iteration number, and spatial dimensions. Randomly initialize parameters such as the position and velocity vectors of the particles, and also initialize the parameters of the LADRC.
- Calculate the Fitness Function Value: assign the particle swarm’s position vectors to the LADRC and compute the fitness function value for each particle based on its current position vector.
- Update Self and Global Best Positions: For each particle, if the current fitness function value is better than its personal best, update the particle’s personal best position. Additionally, if the current fitness function value is better than the global best, update the global best position.
- Updates to the particle velocity: If vid (t + 1) ≤ vmin, then set vid (t + 1) = vmin. If vid (t + 1) ≥ vmax, then set vid (t + 1) = vmax.
- Update the particle position: If xid (t + 1) ≤ xmin, then set xid (t + 1) = xmin. If xid (t + 1) ≥ xmax, then set xid (t + 1) = xmax.
- Check Termination Condition: If the preset number of iterations is reached, terminate the algorithm and output the controller parameters. Otherwise, return to step 2.
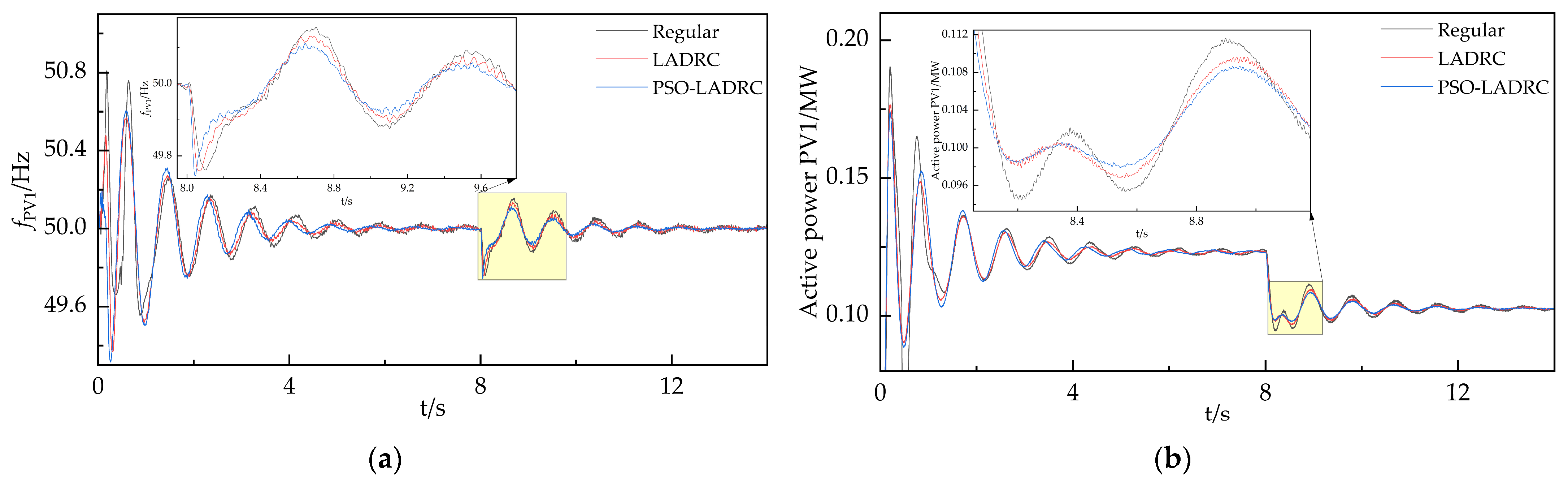
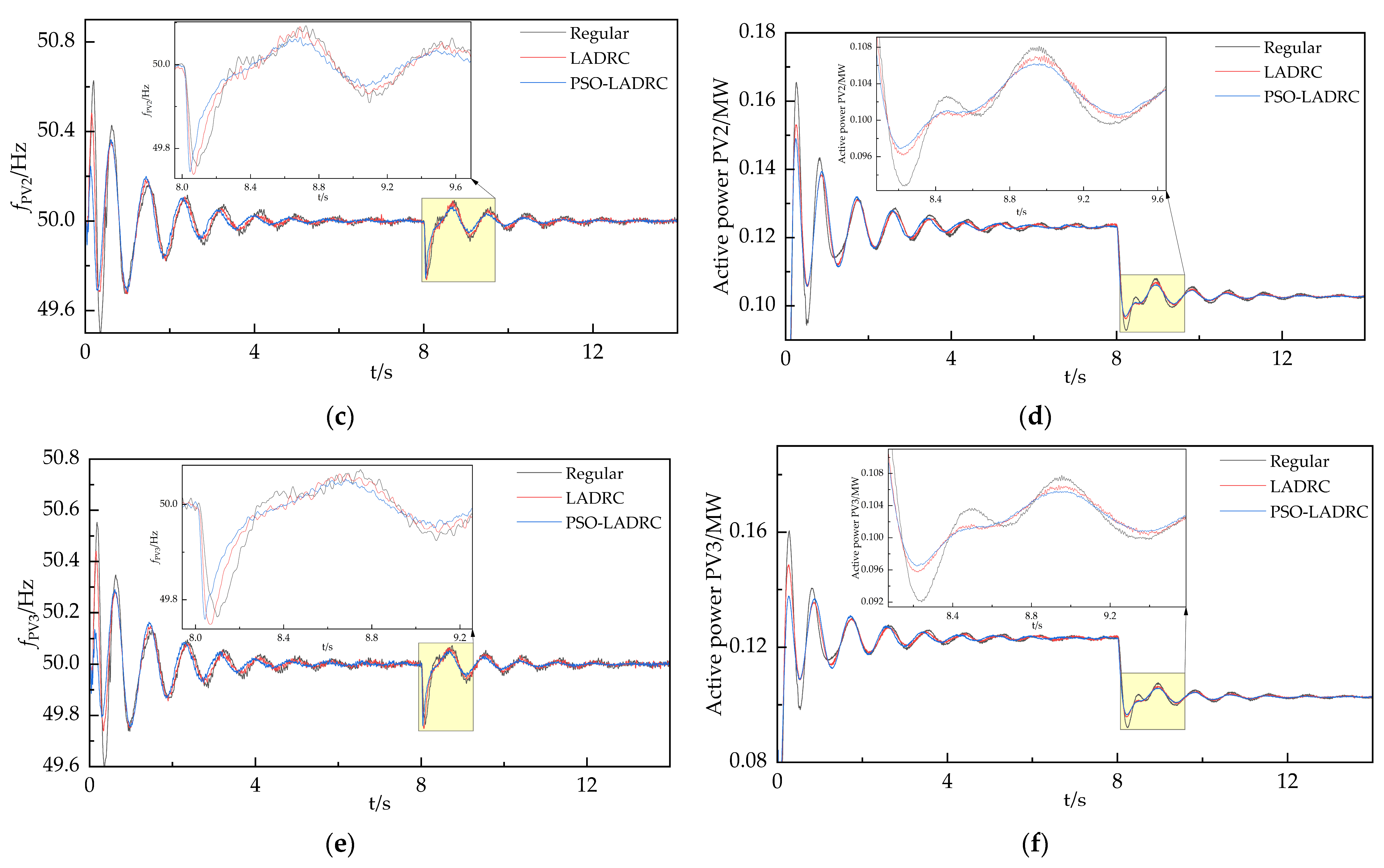
4.3. Simulation Result and Analysis
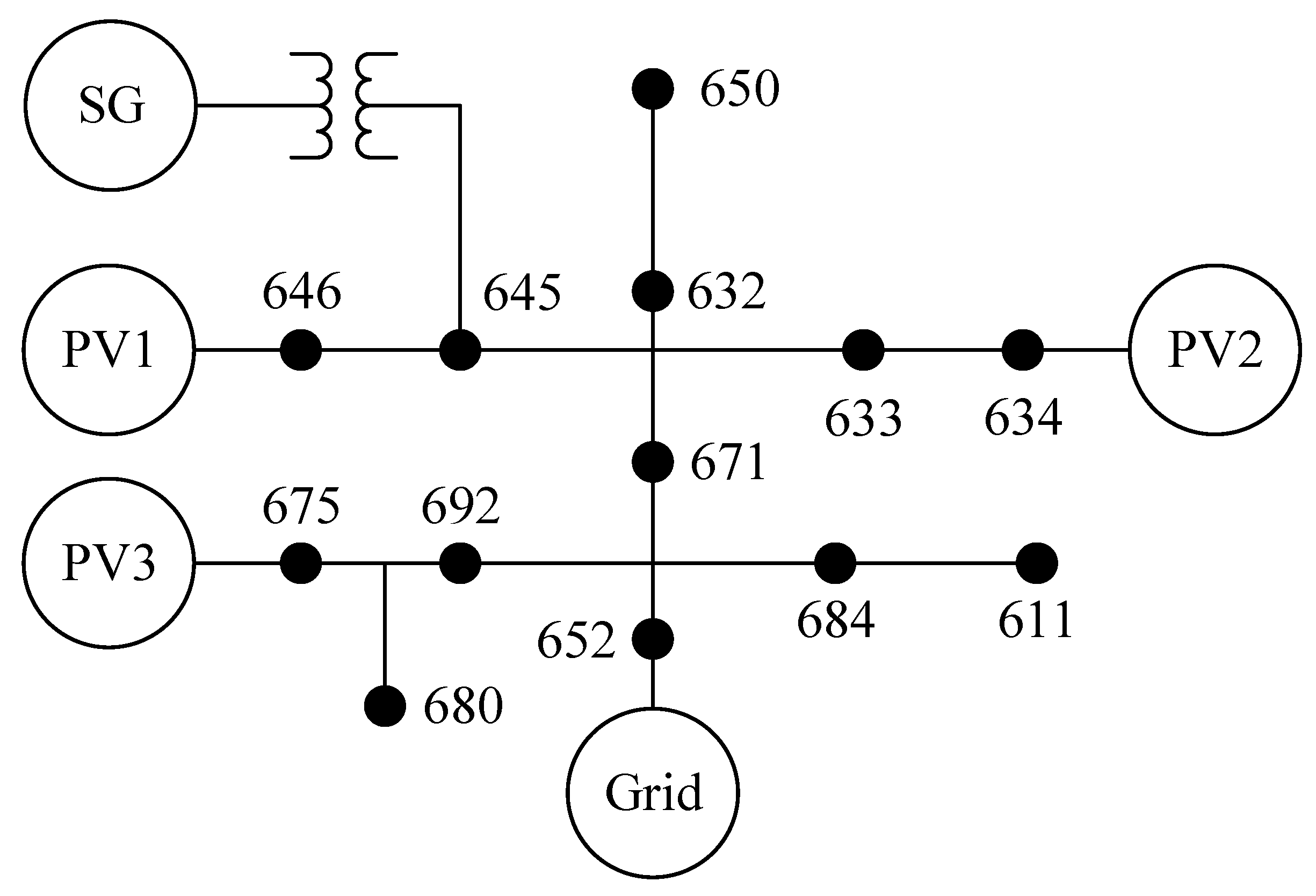
5. Simulation Results and Analysis of Large Power System
6. Conclusions
- A VSG converter-based on GFM power grid is established and its structural principles are studied and analyzed.
- An LADRC for VSGs is proposed and implemented in a VSG converter for a GFM grid. This approach enhances system robustness during frequency fluctuations and improves stability following faults. The effectiveness of this controller is confirmed through simulation.
- The PSO-LADRC algorithm, which incorporates particle swarm optimization, is proposed and applied to the VSG converter in a GFM grid. This approach further enhances system robustness and stability. An analysis over several iterations confirms that the limitations of particle swarm optimization do not undermine the effectiveness of the control strategy.
- To evaluate the effectiveness of control strategies in large-scale power systems with multiple VSG units and high PV penetration, we developed simulation models. We verified the generalization of LADRC and PSO-LADRC strategies for system robustness optimization under various disturbances and PV penetration levels.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; Ruan, X.; Zhong, Q. Improving the Stability of Cascaded DC/DC Converter Systems via Shaping the Input Impedance of the Load Converter with a Parallel or Series Virtual Impedance. IEEE Trans. Ind. Electron. 2015, 62, 7499–7512. [Google Scholar] [CrossRef]
- Wang, K.; Qi, C.; Huang, X.; Li, G. Large disturbance stability evaluation of interconnected multi-inverter power grids with VSG model. J. Eng. 2017, 13, 2483–2488. [Google Scholar] [CrossRef]
- Matevosyan, J.; Badrzadeh, B.; Prevost, T.; Quitmann, E.; Ramasubramanian, D.; Urdal, H.; Achilles, S.; MacDowell, J.; Huang, S.H.; Vital, V.; et al. Grid-Forming Inverters: Are They the Key for High Renewable Penetration. IEEE Power Energy Mag. 2019, 17, 89–98. [Google Scholar] [CrossRef]
- Guo, L.; Xu, Z.; Jin, N.; Li, Y.; Wang, W. A weighted voltage model predictive control method for a virtual synchronous generator with enhanced parameter robustness. Prot. Control Mod. Power Syst. 2021, 6, 482–492. [Google Scholar] [CrossRef]
- Wen, C.; Chen, D.; Hu, C.; Piao, Z.; Zhou, J. Self-adaptive Control of Rotational Inertia and Damping Coefficient of VSG for Converters in Microgrid. Autom. Electr. Power Syst. 2018, 42, 175–186. [Google Scholar]
- Yu, Y.; Hu, X. Active Disturbance Rejection Control Strategy for Grid-Connected Photovoltaic Inverter Based on Virtual Synchronous Generator. IEEE Access 2019, 7, 17328–17336. [Google Scholar] [CrossRef]
- Yu, J.; Sun, W.; Yu, J.; Wang, Y. Virtual synchronous generator control of a grid-connected inverter based on adaptive inertia. Power Syst. Prot. Control 2022, 50, 137–144. [Google Scholar]
- Li, D.; Zhu, Q.; Lin, S.; Bian, X.Y. A self-adaptive inertia and damping combination control of VSG to support frequency stability. IEEE Trans. Energy Convers. 2016, 32, 397–398. [Google Scholar] [CrossRef]
- Choopani, M.; Hosseinian, S.H.; Vahidi, B. New transient stability and LVRT improvement of multi-VSG grids using the frequency of the center of inertia. IEEE Trans. Power Syst. 2019, 35, 527–538. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, J.; Dong, X.; Zhao, P.; Ge, P.; Zhang, X. A control strategy for smooth power tracking of a grid-connected virtual synchronous generator based on linear active disturbance rejection control. Energies 2019, 14, 3024. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, J.; Li, C.; Zhang, W.; Wu, Q.; Wen, M.; Blaabjerg, F. A New Virtual Inductance Control Method for Frequency Stabilization of Grid-Forming Virtual Synchronous Generators. IEEE Trans. Ind. Electron. 2022, 70, 441–451. [Google Scholar] [CrossRef]
- Li, M.; Wang, Y.; Xu, N.; Niu, R.; Lei, W. Virtual synchronous generator control strategy based on bandpass damping power feedback. Trans. China Electrotech. Soc. 2018, 33, 2176–2185. [Google Scholar]
- D’Arco, S.; Suul, J.A. Virtual Synchronous Machines Classification of Implementations and Analysis of Equivalence to Droop Controllers for Microgrids. In Proceedings of the 2013 IEEE Grenoble Conference, Powertech, Grenoble, France, 16–20 June 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Han, J.Q. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Wu, D.; Chen, K. Frequency-domain analysis of nonlinear active disturbance rejection control via the describing function method. IEEE Trans. Ind. Electron. 2013, 60, 3906–3914. [Google Scholar] [CrossRef]
- Guo, B.Z.; Jin, F.F. Sliding mode and active disturbance rejection control to stabilization of one-dimensional anti-stable wave equations subject to disturbance in boundary input. IEEE Trans. Autom. Control 2013, 58, 1269–1274. [Google Scholar] [CrossRef]
- Yuan, D.; Ma, X.; Zeng, Q.; Qiu, X. Research on frequency-band characteristics and parameters configuration of linear active disturbance rejection control for second-order systems. Control Theory Technol. 2013, 30, 1630–1640. [Google Scholar]
- Liang, Q.; Wang, C.; Pan, J.W.; Wei, Y.H.; Wang, Y. Parameter identification of b0 and parameter tuning law in linear active disturbance rejection control. Control Decis. 2015, 30, 1691–1695. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategies | Advantages | Disadvantages |
|---|---|---|
| Model predictive control | Particularly suitable for grid stability control when load types and sizes change suddenly. | System modeling is challenging and expensive, and frequent predictions and adjustments can cause delays, impacting control responsiveness. |
| Active disturbance rejection control | High adaptability and strong anti-interference capability can stabilize the power grid under various interferences. | Complex calculations, challenging parameter selection, and difficulty in fully achieving the control effect. |
| Sliding mode control | Strong system robustness and self-adaptation with high control accuracy. | Sensitive to noise and extremely difficult to design and debug, particularly due to the rapid switching of sliding surfaces. |
| ESO Parameters | k1 | k2 | k3 |
| value | 300 | 30,000 | 1,000,000 |
| ESO Parameters | ω0 | ωc | b |
| value | 100 | 800 | 500 |
| Conditions | LADRC | J | D |
| 1 | No | 0.2 | 30 |
| 2 | 0.2 | 50 | |
| 3 | 1 | 50 | |
| 4 | Yes | 0.2 | 30 |
| 5 | 0.2 | 50 | |
| 6 | 1 | 50 |
| Parameters | J | D | ΔFN |
|---|---|---|---|
| 1 | 0.2 | 30 | 0.009053195 |
| 2 | 0.5 | 30 | 0.013404251 |
| 3 | 1 | 30 | 0.014185879 |
| 4 | 0.2 | 40 | 0.008924131 |
| 5 | 0.2 | 50 | 0.008364361 |
| Number of Iterations | ωo | ωc | b | FN |
|---|---|---|---|---|
| 1 | 146.5 | 85.1 | 55,903.3 | 49.70028 |
| 2 | 276.0 | 81.5 | 16,218.3 | 49.70102 |
| 3 | 301.5 | 5.9 | 42,288.6 | 49.70069 |
| 4 | 163.5 | 98.8 | 63,118.9 | 49.69931 |
| 5 | 285.9 | 50.4 | 40,672.8 | 49.70171 |
| 6 | 318.0 | 14.0 | 67,227.1 | 49.69891 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; Zhang, L.; Kang, W. Research on Linear Active Disturbance Rejection Control Based on Grid-Forming Distributed Photovoltaics. Electronics 2024, 13, 3017. https://doi.org/10.3390/electronics13153017
Liu K, Zhang L, Kang W. Research on Linear Active Disturbance Rejection Control Based on Grid-Forming Distributed Photovoltaics. Electronics. 2024; 13(15):3017. https://doi.org/10.3390/electronics13153017
Chicago/Turabian StyleLiu, Kexuan, Lixia Zhang, and Wei Kang. 2024. "Research on Linear Active Disturbance Rejection Control Based on Grid-Forming Distributed Photovoltaics" Electronics 13, no. 15: 3017. https://doi.org/10.3390/electronics13153017
APA StyleLiu, K., Zhang, L., & Kang, W. (2024). Research on Linear Active Disturbance Rejection Control Based on Grid-Forming Distributed Photovoltaics. Electronics, 13(15), 3017. https://doi.org/10.3390/electronics13153017