
Deep Reinforcement Learning-Based Multipath Routing for LEO Megaconstellation Networks


Abstract
1. Introduction
- The multipath routing problem in satellite networks is modeled as a stochastic optimization problem under traffic and bandwidth constraints. The objective is to maximize network efficiency. The problem is decoupled into a multipath routing discovery subproblem and a multipath traffic scheduling subproblem.
- In order to address the multipath routing discovery subproblem, the MHMRD algorithm has been proposed as a means of planning multiple minimum hop count paths for each flow between any pair of nodes in the network based on the link state information.
- The multipath traffic scheduling subproblem is modeled as an MDP, with the GMTS scheme proposed to dynamically schedule the proportion of traffic on each available path for each data stream. GMTS is a scalable solution which can be applied to different constellations.
2. Related Work
2.1. Multipath Routing
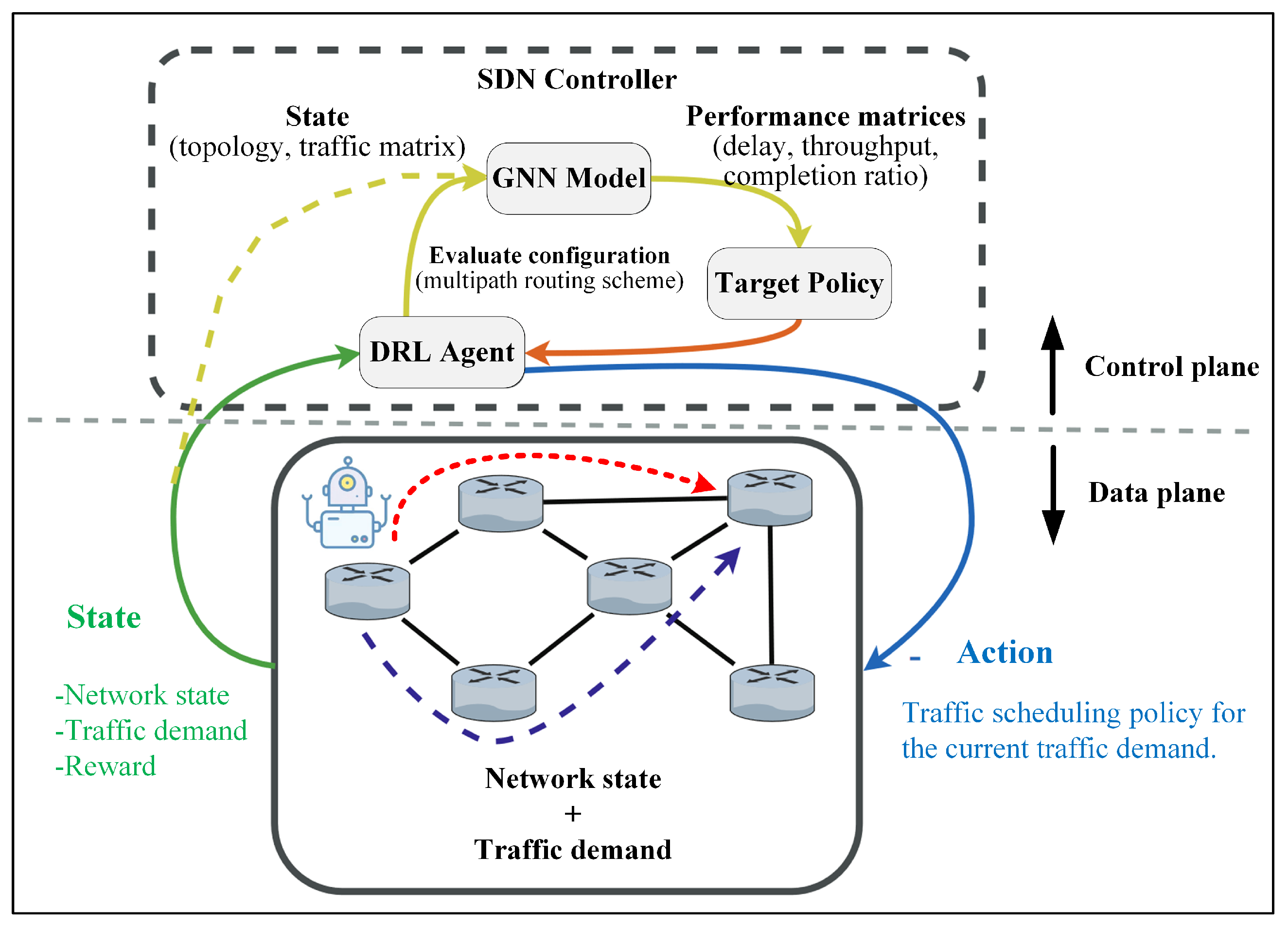
2.2. Intelligent Routing
3. System Model and Problem Formulation
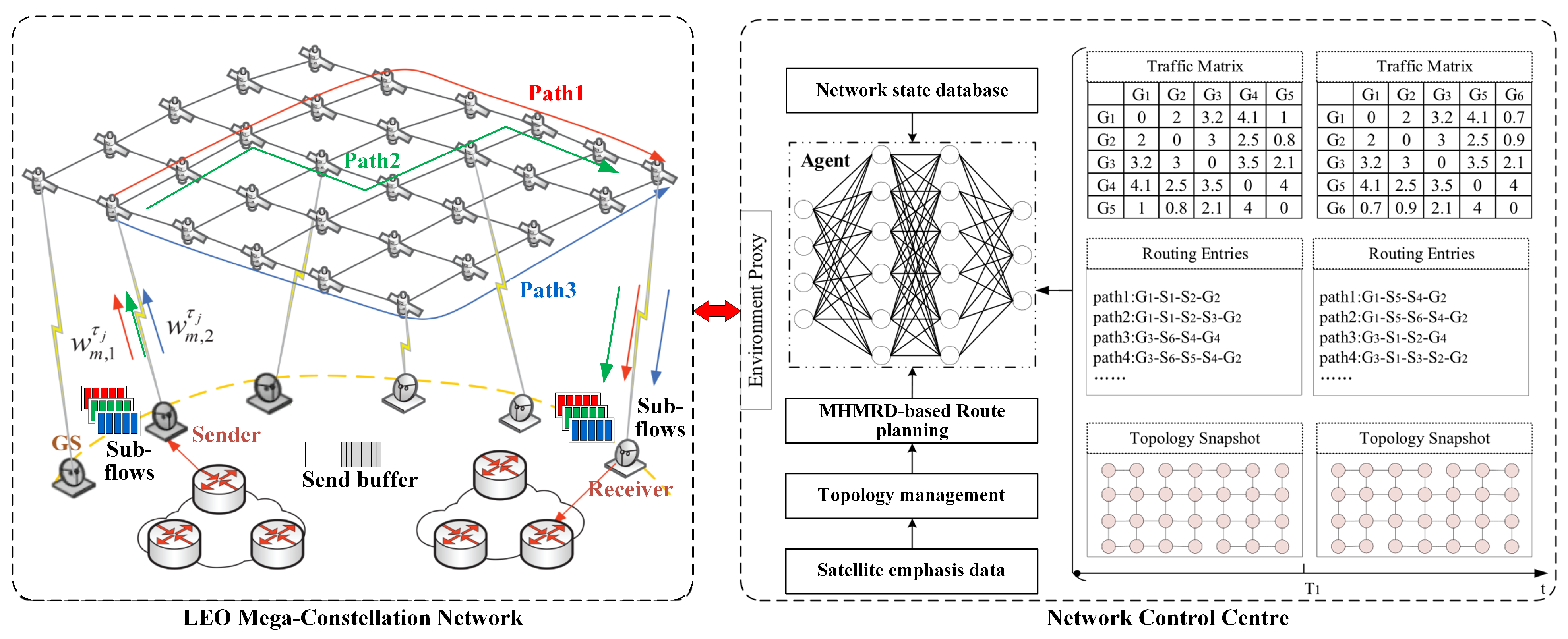
3.1. Multipath Scenario
3.2. Multipath Routing and Traffic Model
3.3. Problem Formulation
4. DRL-Based Multipath Routing
4.1. Multipath Routing Discovery
4.1.1. Inter-Plane Hops
4.1.2. Intra-Plane Hops
| Algorithm 1: Minimum hop count-based multipath route discovery (MHMRD). |
 |
4.2. Multipath Traffic Scheduling
4.2.1. State
4.2.2. Action
4.2.3. Reward
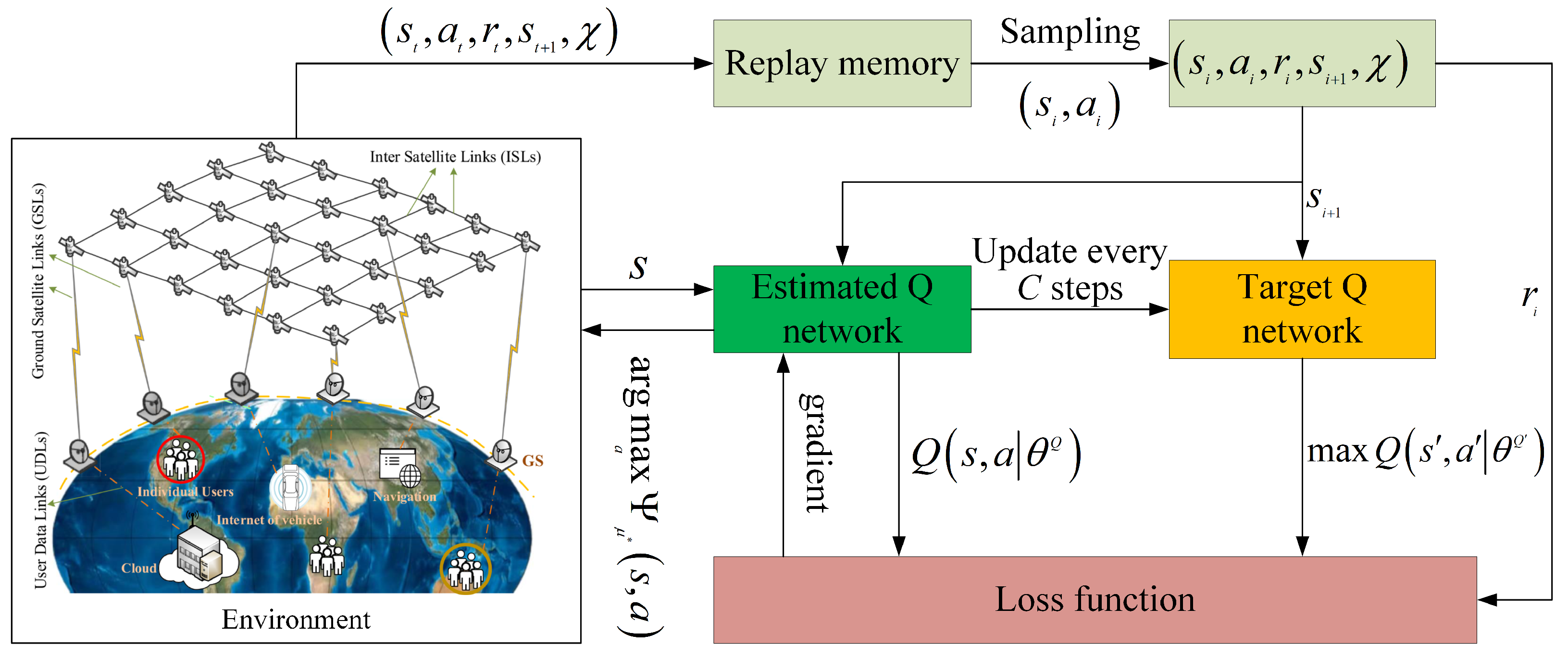
4.3. Training Process of GMTS
| Algorithm 2: Training process of the GNN-based multipath traffic scheduling (GMTS). |
 |
4.4. Workflow of DMR
5. Performance Evaluation
5.1. Simulation Set-Up
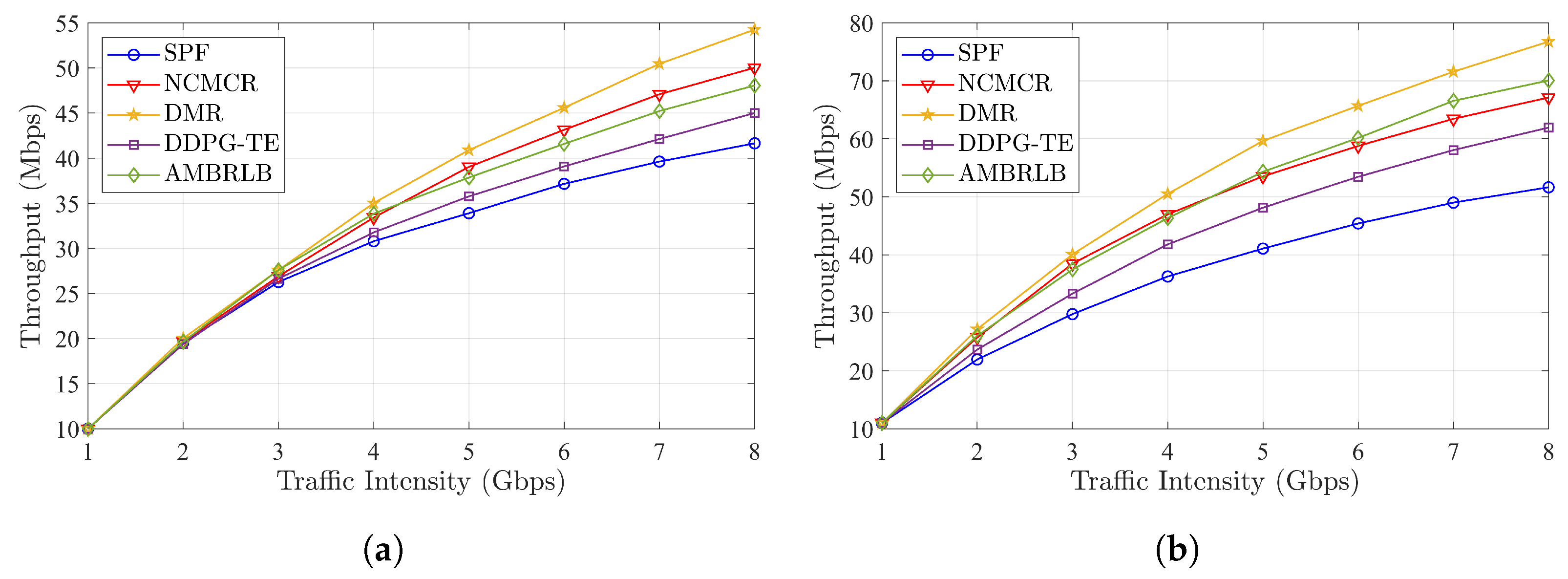
- Shortest path first algorithm (SPF): SPF employs the average transmission delay as a link metric with the objective of minimizing the total delay.
- Network coding-based multipath cooperative routing (NCMCR) [24]: NCMCR is designed to address the routing challenges posed by a frequently changing topology and potentially sparse and intermittent connectivity. The NCMCR algorithm takes advantage of the predictability of the relative motion of the satellites, with the time-varying topology modeled as a spatiotemporal map.
- Ant-based multipath backbone routing for load balancing (AMBRLB) [38]: In order to overcome the issues of traffic overflow and overhead, an ant-based load balancing multipath backbone routing algorithm in MANET was proposed. Upon the initiation of transmission by a source node to a destination node, the ant colony optimization (ACO) algorithm is employed to identify multiple paths with the highest probability of success.
- Deep deterministic policy gradient traffic engineering (DDPG-TE) [39]: This method employs the DDPG algorithm to dynamically allocate the traffic proportions of different transmission paths. It should be noted that the model is not applicable to arbitrary satellite constellations, as the dimensions of the state and action spaces are constrained by the size of the input topology and traffic matrices.
5.2. Results and Analysis
5.2.1. Throughput
5.2.2. Average Flow Completion Ratio
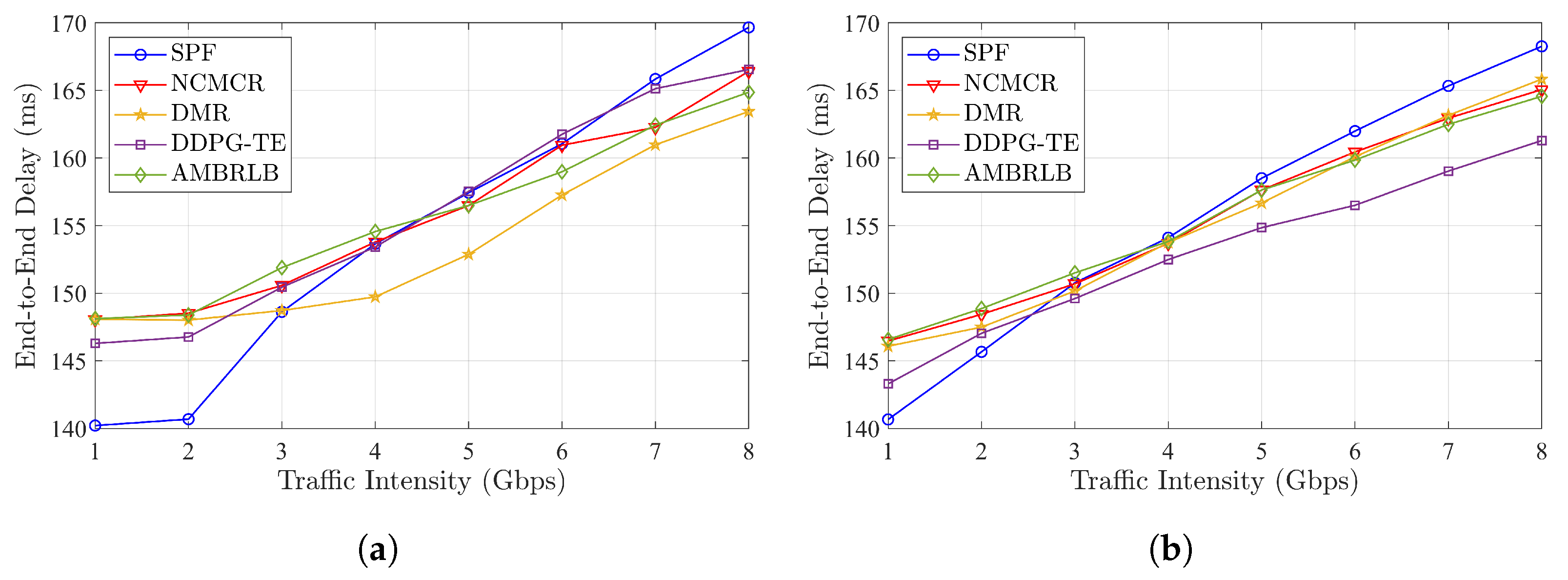
5.2.3. Average End-to-End Delay
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| DRL | Deep reinforcement learning |
| DMR | DRL-based multipath routing |
| MHMRD | Minimum hop count-based multipath routing discovery algorithm |
| GNN | Graph neural network |
| GMTS | GNN-based multipath traffic scheduling |
| MCN | Megaconstellation network |
| SAGIN | Space-air-ground integrated network |
| ISLs | Inter-satellite links |
| SDN | Software-defined network |
| RAAN | Right ascension of ascending node |
| NCC | Network control center |
| LEO | Low Earth orbit |
| DQN | Deep Q network |
References
- Jiang, X.; Huang, Y.; Li, J.; He, H.; Chen, S.; Yang, F.; Yang, J. Spatio-Temporal Routing, Redundant Coding and Multipath Scheduling for Deterministic Satellite Network Transmission. IEEE Trans. Commun. 2023, 71, 2860–2875. [Google Scholar] [CrossRef]
- Kodheli, O.; Lagunas, E.; Maturo, N.; Sharma, S.K.; Shankar, B.; Montoya, J.F.M.; Duncan, J.C.M.; Spano, D.; Chatzinotas, S.; Kisseleff, S.; et al. Satellite Communications in the New Space Era: A Survey and Future Challenges. IEEE Commun. Surv. Tutor. 2021, 23, 70–109. [Google Scholar] [CrossRef]
- Rakhmanov, A.; Wiseman, Y. Compression of GNSS Data with the Aim of Speeding up Communication to Autonomous Vehicles. Remote Sens. 2023, 15, 2165. [Google Scholar] [CrossRef]
- Correia, S.D.; Perez, R.; Matos-Carvalho, J.; Leithardt, V.R.Q. µJSON, a Lightweight Compression Scheme for Embedded GNSS Data Transmission on IoT Nodes. In Proceedings of the 2022 5th Conference on Cloud and Internet of Things (CIoT), Marrakech, Morocco, 28–30 March 2022; pp. 232–238. [Google Scholar]
- Xue, C.; Li, W.; Yu, L.; Shang, J.; Chen, X.; Lu, S. SERO: A Model-Driven Seamless Roaming Framework for Wireless Mesh Network With Multipath TCP. IEEE Trans. Commun. 2019, 67, 1284–1296. [Google Scholar] [CrossRef]
- Liu, X.; Ma, T.; Qin, X.; Zhou, H.; Zhao, L. A DRL Empowered Multipath Cooperative Routing for Ultra-Dense LEO Satellite Networks. In Proceedings of the GLOBECOM 2023, Kuala Lumpur, Malaysia, 4–8 December 2023; pp. 5961–5966. [Google Scholar]
- Li, R.; Zhang, J.; Zheng, S.; Wang, K.; Wang, P.; Zhang, X. LEO Mega-Constellations Routing Algorithm Based on Area Segmentation. In Proceedings of the 2023 IEEE Wireless Communications and Networking Conference (WCNC), Glasgow, UK, 26–29 March 2023; pp. 1–6. [Google Scholar]
- Li, Y.; Zhang, Q.; Yao, H.; Gao, R.; Xin, X.; Yu, F.R. Stigmergy and Hierarchical Learning for Routing Optimization in Multi-Domain Collaborative Satellite Networks. IEEE J. Select. Areas Commun. 2024, 42, 1188–1203. [Google Scholar] [CrossRef]
- Perkins, C.E.; Royer, E.M. Ad-Hoc on-Demand Distance Vector Routing. In Proceedings of the WMCSA’99. Second IEEE Workshop on Mobile Computing Systems and Applications, New Orleans, LA, USA, 25–26 February 1999; pp. 90–100. [Google Scholar]
- Jiang, F.; Zhang, Q.; Yang, Z.; Yuan, P. A Space–Time Graph Based Multipath Routing in Disruption-Tolerant Earth-Observing Satellite Networks. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2592–2603. [Google Scholar] [CrossRef]
- Huang, Y.; Yang, D.; Feng, B.; Tian, A.; Dong, P.; Yu, S.; Zhang, H. A GNN-Enabled Multipath Routing Algorithm for Spatial-Temporal Varying LEO Satellite Networks. IEEE Trans. Veh. Technol. 2024, 73, 5454–5468. [Google Scholar] [CrossRef]
- Huang, Y.; Jiang, X.; Chen, S.; Yang, F.; Yang, J. Pheromone Incentivized Intelligent Multipath Traffic Scheduling Approach for LEO Satellite Networks. IEEE Trans. Wirel. Commun. 2022, 21, 5889–5902. [Google Scholar] [CrossRef]
- Tian, A.; Feng, B.; Zhou, H.; Huang, Y.; Sood, K.; Yu, S.; Zhang, H. Efficient Federated DRL-Based Cooperative Caching for Mobile Edge Networks. IEEE Trans. Netw. Serv. Manag. 2023, 20, 246–260. [Google Scholar] [CrossRef]
- Huang, X.; Yuan, T.; Qiao, G.; Ren, Y. Deep Reinforcement Learning for Multimedia Traffic Control in Software Defined Networking. IEEE Netw. 2018, 32, 35–41. [Google Scholar] [CrossRef]
- Lei, K.; Guo, P.; Wang, Y.; Wu, X.; Zhao, W. Solve Routing Problems with a Residual Edge-Graph Attention Neural Network. Neurocomputing 2022, 508, 79–98. [Google Scholar] [CrossRef]
- Zheng, X.; Huang, W.; Li, H.; Li, G. Research on Generalized Intelligent Routing Technology Based on Graph Neural Network. Electronics 2022, 11, 2952. [Google Scholar] [CrossRef]
- Wei, H.; Zhao, Y.; Xu, K. G-Routing: Graph Neural Networks-Based Flexible Online Routing. IEEE Netw. 2023, 37, 90–96. [Google Scholar] [CrossRef]
- Rusek, K.; Suarez-Varela, J.; Almasan, P.; Barlet-Ros, P.; Cabellos-Aparicio, A. RouteNet: Leveraging Graph Neural Networks for Network Modeling and Optimization in SDN. IEEE J. Select. Areas Commun. 2020, 38, 2260–2270. [Google Scholar] [CrossRef]
- Bi, Y.; Han, G.; Xu, S.; Wang, X.; Lin, C.; Yu, Z.; Sun, P. Software Defined Space-Terrestrial Integrated Networks: Architecture, Challenges, and Solutions. IEEE Netw. 2019, 33, 22–28. [Google Scholar] [CrossRef]
- Hu, M.; Xiao, M.; Hu, Y.; Cai, C.; Deng, T.; Peng, K. Software Defined Multicast Using Segment Routing in LEO Satellite Networks. IEEE Trans. Mob. Comput. 2024, 23, 835–849. [Google Scholar] [CrossRef]
- Han, Z.; Xu, C.; Zhao, G.; Wang, S.; Cheng, K.; Yu, S. Time-Varying Topology Model for Dynamic Routing in LEO Satellite Constellation Networks. IEEE Trans. Veh. Technol. 2023, 72, 3440–3454. [Google Scholar] [CrossRef]
- Giambene, G.; Luong, D.K.; De Cola, T.; Le, V.A.; Muhammad, M. Analysis of a Packet-Level Block Coding Approach for Terrestrial-Satellite Mobile Systems. IEEE Trans. Veh. Technol. 2019, 68, 8117–8132. [Google Scholar] [CrossRef]
- Chen, Z.; Zhou, W.; Wu, S.; Cheng, L. An Adaptive On-Demand Multipath Routing Protocol With QoS Support for High-Speed MANET. IEEE Access 2020, 8, 44760–44773. [Google Scholar] [CrossRef]
- Tang, F.; Zhang, H.; Yang, L.T. Multipath Cooperative Routing with Efficient Acknowledgement for LEO Satellite Networks. IEEE Trans. Mob. Comput. 2019, 18, 179–192. [Google Scholar] [CrossRef]
- Li, G.; Zhou, H.; Feng, B.; Zhang, Y.; Yu, S. Efficient Provision of Service Function Chains in Overlay Networks Using Reinforcement Learning. IEEE Trans. Cloud Comput. 2022, 10, 383–395. [Google Scholar] [CrossRef]
- Kato, N.; Fadlullah, Z.M.; Mao, B.; Tang, F.; Akashi, O.; Inoue, T.; Mizutani, K. The Deep Learning Vision for Heterogeneous Network Traffic Control: Proposal, Challenges, and Future Perspective. IEEE Wirel. Commun. 2017, 24, 146–153. [Google Scholar] [CrossRef]
- Mao, B.; Fadlullah, Z.M.; Tang, F.; Kato, N.; Akashi, O.; Inoue, T.; Mizutani, K. Routing or Computing? The Paradigm Shift Towards Intelligent Computer Network Packet Transmission Based on Deep Learning. IEEE Trans. Comput. 2017, 66, 1946–1960. [Google Scholar] [CrossRef]
- Geyer, F.; Carle, G. Learning and Generating Distributed Routing Protocols Using Graph-Based Deep Learning. In Proceedings of the 2018 Workshop on Big Data Analytics and Machine Learning for Data Communication Networks, Budapest, Hungary, 20 August 2018; pp. 40–45. [Google Scholar]
- Liu, C.; Xu, M.; Yang, Y.; Geng, N. DRL-OR: Deep Reinforcement Learning-Based Online Routing for Multi-Type Service Requirements. In Proceedings of the IEEE INFOCOM 2021—IEEE Conference on Computer Communications, Vancouver, BC, Canada, 10–13 May 2021; pp. 1–10. [Google Scholar]
- Almasan, P.; Suárez-Varela, J.; Rusek, K.; Barlet-Ros, P.; Cabellos-Aparicio, A. Deep Reinforcement Learning Meets Graph Neural Networks: Exploring a Routing Optimization Use Case. Comput. Commun. 2022, 196, 184–194. [Google Scholar] [CrossRef]
- Sun, P.; Guo, Z.; Li, J.; Xu, Y.; Lan, J.; Hu, Y. Enabling Scalable Routing in Software-Defined Networks With Deep Reinforcement Learning on Critical Nodes. IEEE/ACM Trans. Netw. 2022, 30, 629–640. [Google Scholar] [CrossRef]
- Kim, G.; Kim, Y.; Lim, H. Deep Reinforcement Learning-Based Routing on Software-Defined Networks. IEEE Access 2022, 10, 18121–18133. [Google Scholar] [CrossRef]
- Jiang, Z.; Wu, Q.; Li, H.; Wu, J. scMPTCP: SDN Cooperated Multipath Transfer for Satellite Network With Load Awareness. IEEE Access 2018, 6, 19823–19832. [Google Scholar] [CrossRef]
- De Santis, E.; Giuseppi, A.; Pietrabissa, A.; Capponi, M.; Delli Priscoli, F. Satellite Integration into 5G: Deep Reinforcement Learning for Network Selection. Mach. Intell. Res. 2022, 19, 127–137. [Google Scholar] [CrossRef]
- Iridium Constellation. Available online: https://celestrak.org/NORAD/elements/table.php?GROUP=iridium (accessed on 30 July 2024).
- Oneweb Constellation. Available online: https://celestrak.org/NORAD/elements/table.php?GROUP=oneweb (accessed on 30 July 2024).
- MAWI Working Group Traffic Archive. Available online: https://mawi.wide.ad.jp/mawi/ (accessed on 30 July 2024).
- Francis Antony Selvi, P.; Manikandan, M.S.K. Ant Based Multipath Backbone Routing for Load Balancing in MANET. IET Commun. 2017, 11, 136–141. [Google Scholar] [CrossRef]
- Chen, B.; Sun, P.; Zhang, P.; Lan, J.; Bu, Y.; Shen, J. Traffic Engineering Based on Deep Reinforcement Learning in Hybrid IP/SR Network. China Commun. 2021, 18, 204–213. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constellation | h | E | ||||
|---|---|---|---|---|---|---|
| Iridium | 6 | 11 | 16 | 780 km | ||
| OneWeb | 18 | 36 | 16 | 550 km |
| Parameter | Value | |
|---|---|---|
| Network parameter | 24 | |
| 100 | ||
| 1 KB | ||
| Learning parameter | 32 | |
| 100 | ||
| 0.6 | ||
| 0.5 | ||
| 0.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, C.; Xiong, W.; Yu, R. Deep Reinforcement Learning-Based Multipath Routing for LEO Megaconstellation Networks. Electronics 2024, 13, 3054. https://doi.org/10.3390/electronics13153054
Han C, Xiong W, Yu R. Deep Reinforcement Learning-Based Multipath Routing for LEO Megaconstellation Networks. Electronics. 2024; 13(15):3054. https://doi.org/10.3390/electronics13153054
Chicago/Turabian StyleHan, Chi, Wei Xiong, and Ronghuan Yu. 2024. "Deep Reinforcement Learning-Based Multipath Routing for LEO Megaconstellation Networks" Electronics 13, no. 15: 3054. https://doi.org/10.3390/electronics13153054
APA StyleHan, C., Xiong, W., & Yu, R. (2024). Deep Reinforcement Learning-Based Multipath Routing for LEO Megaconstellation Networks. Electronics, 13(15), 3054. https://doi.org/10.3390/electronics13153054