
An Adaptive High-Efficiency LED Backlight Driver


Abstract
:1. Introduction
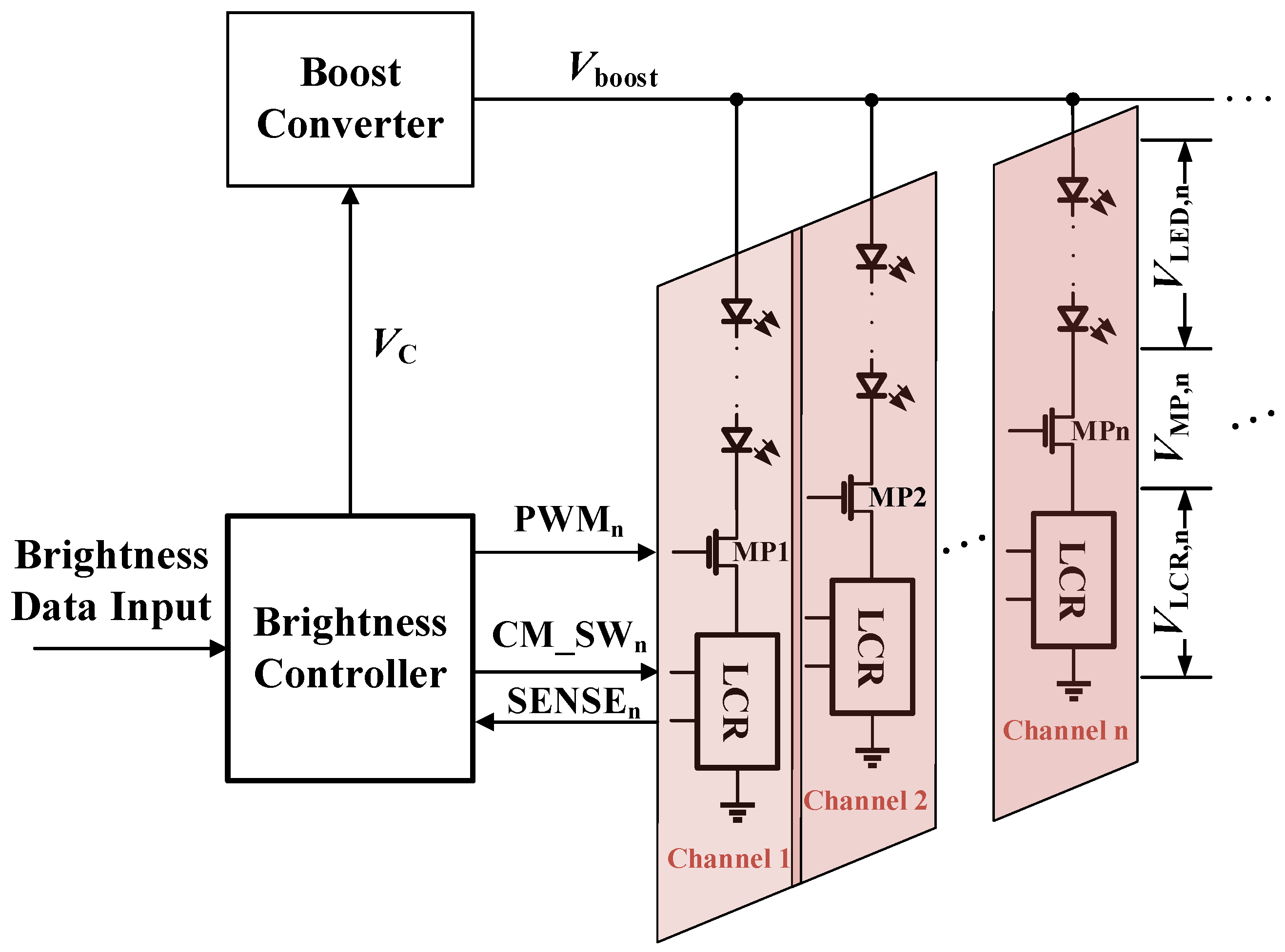
2. Adaptive Control Technique
2.1. Principle of Adaptive Control
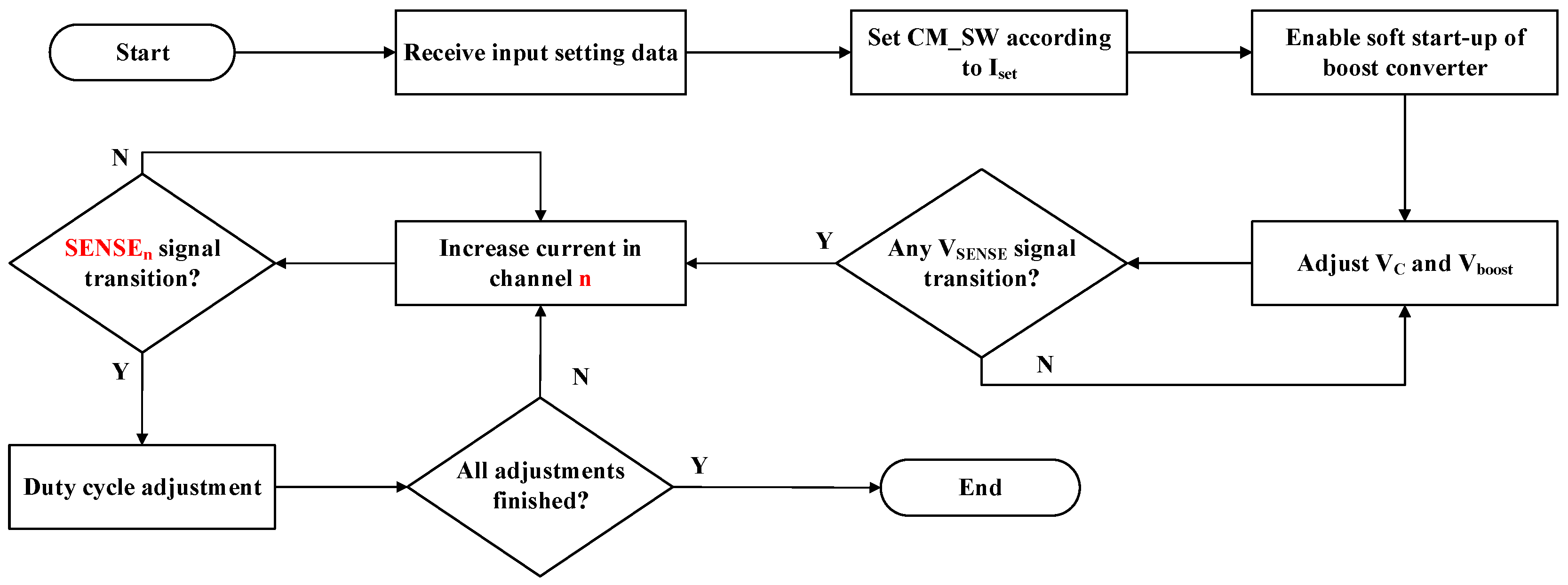
2.2. Adaptive Control Process
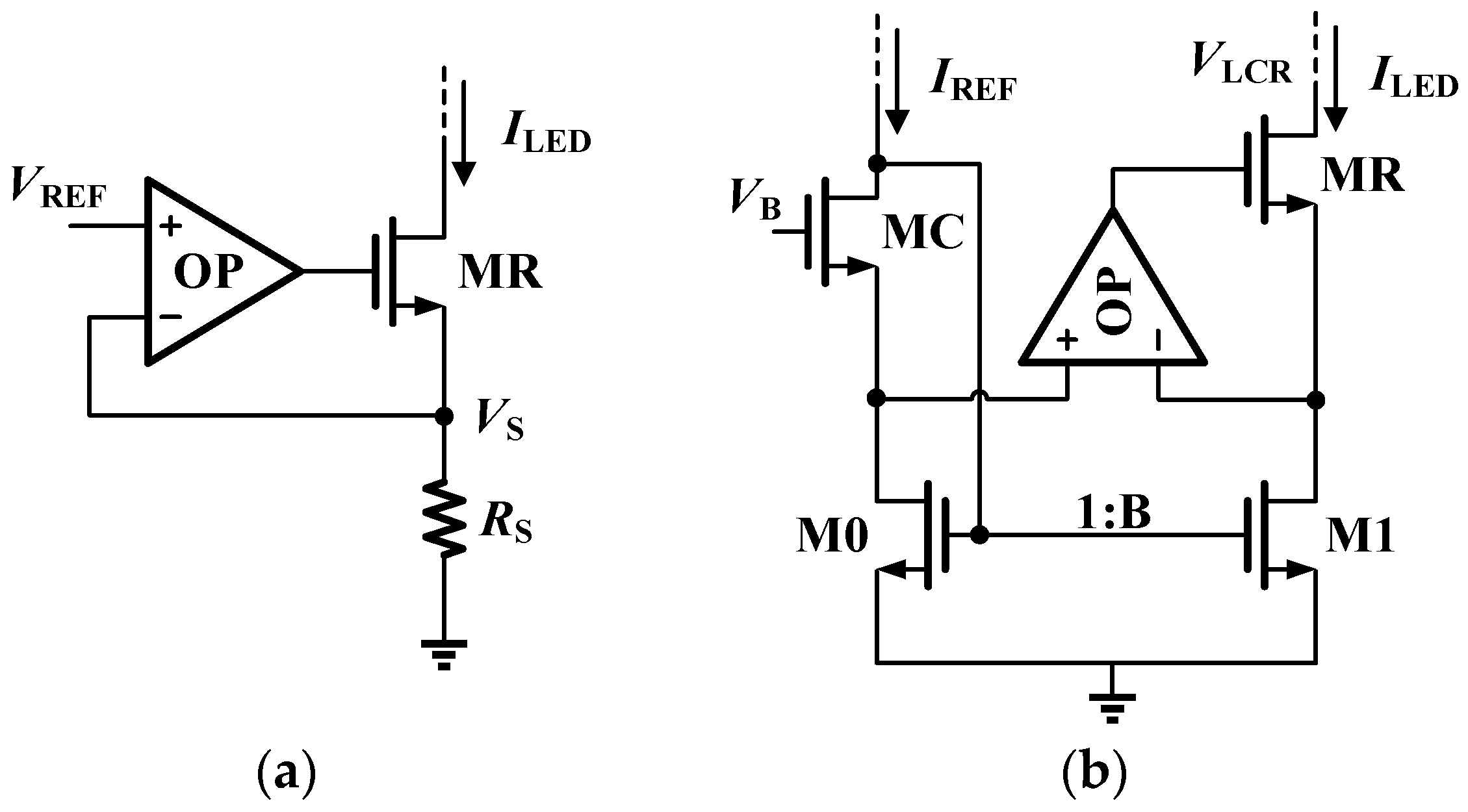
2.3. Linear Current Regulator
3. Simulation and Measurement Results
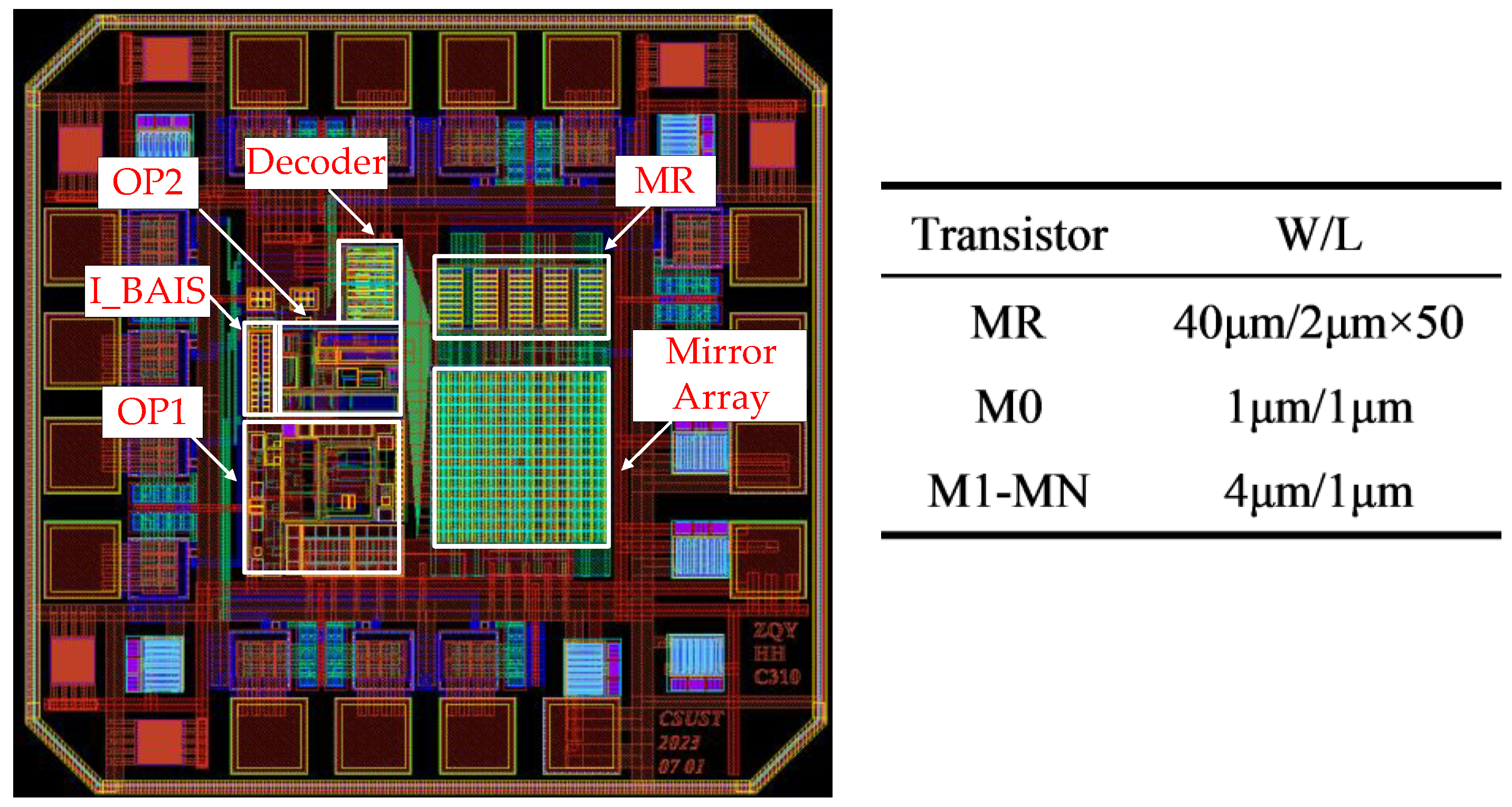
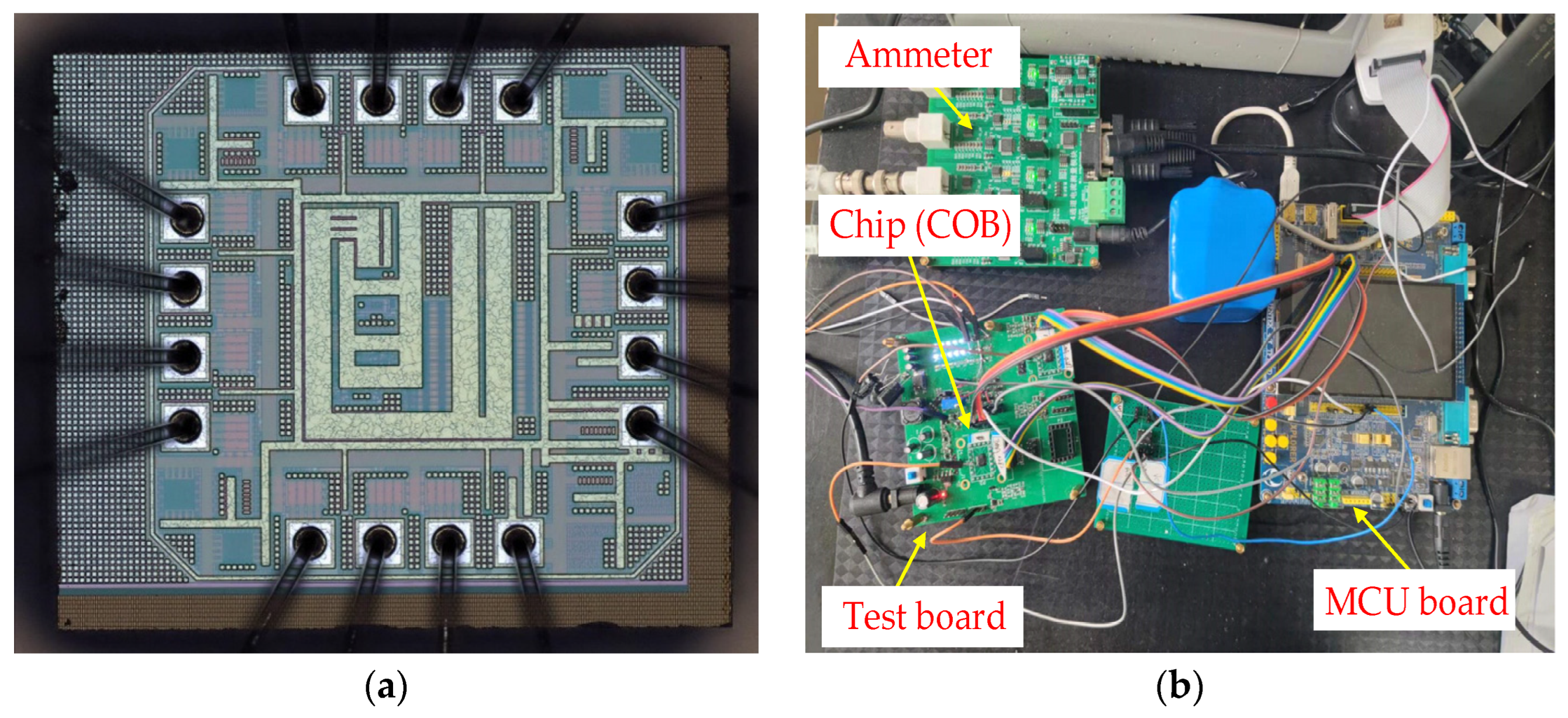
3.1. System and Chip Design
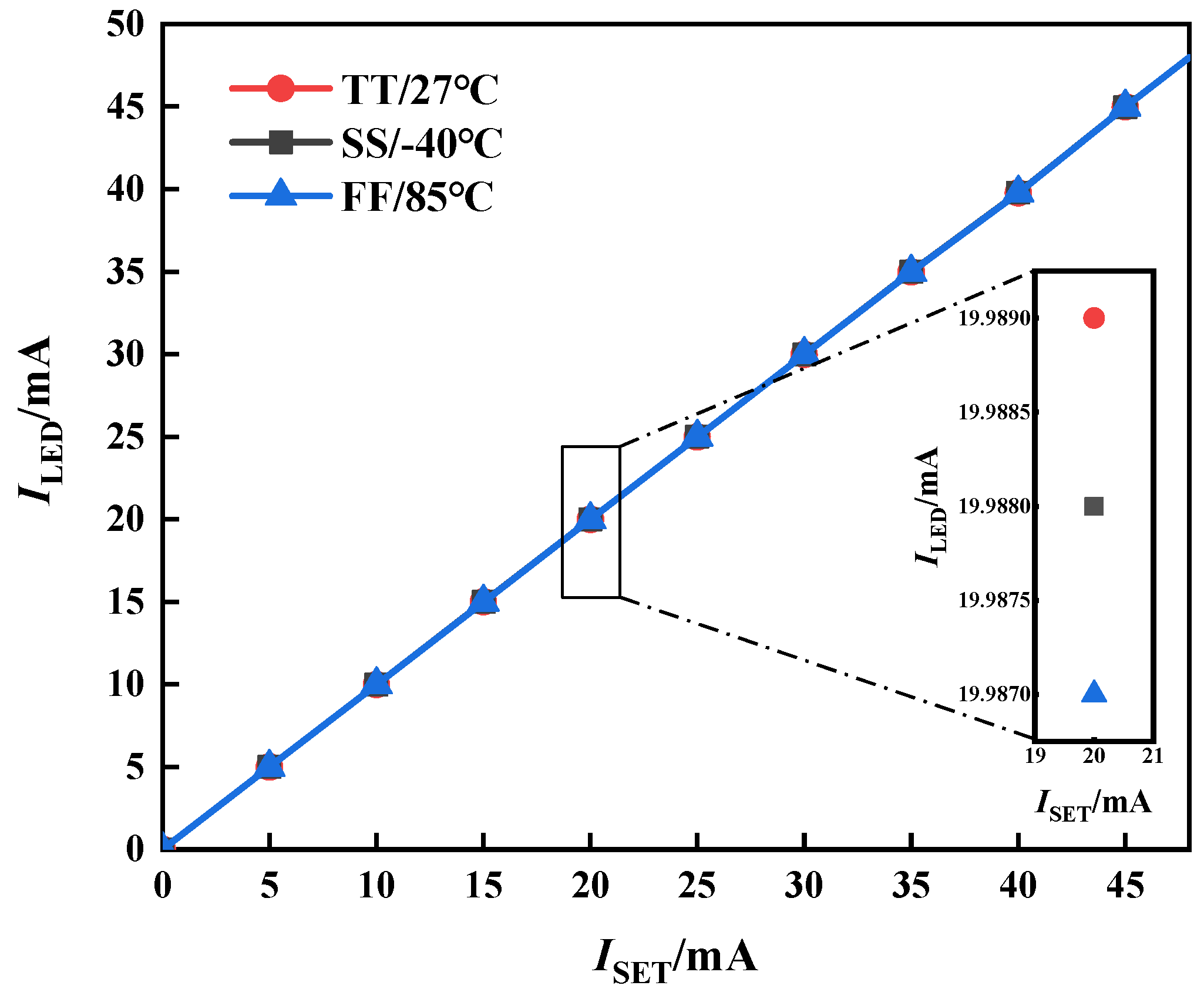
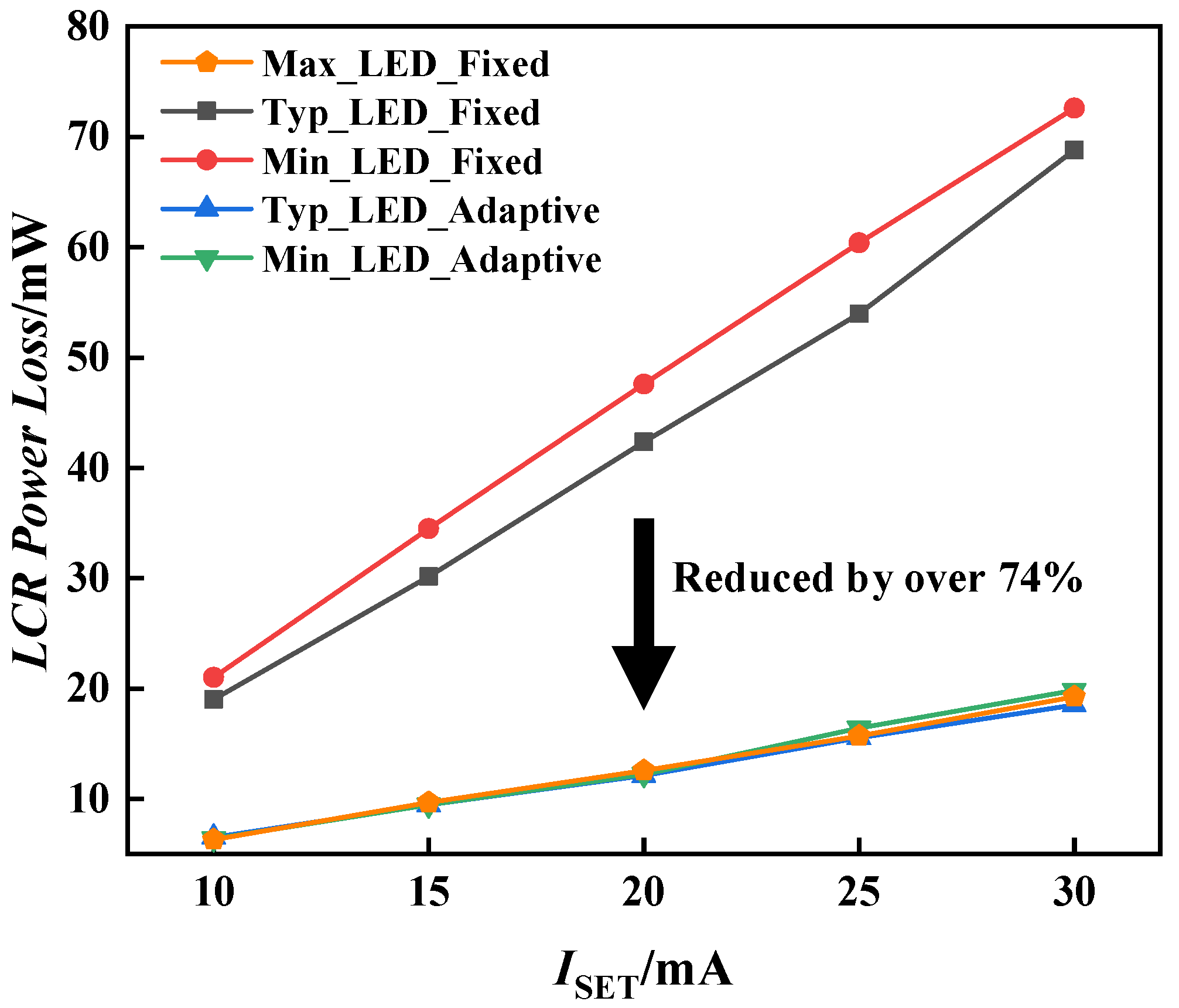
3.2. Simulation Results
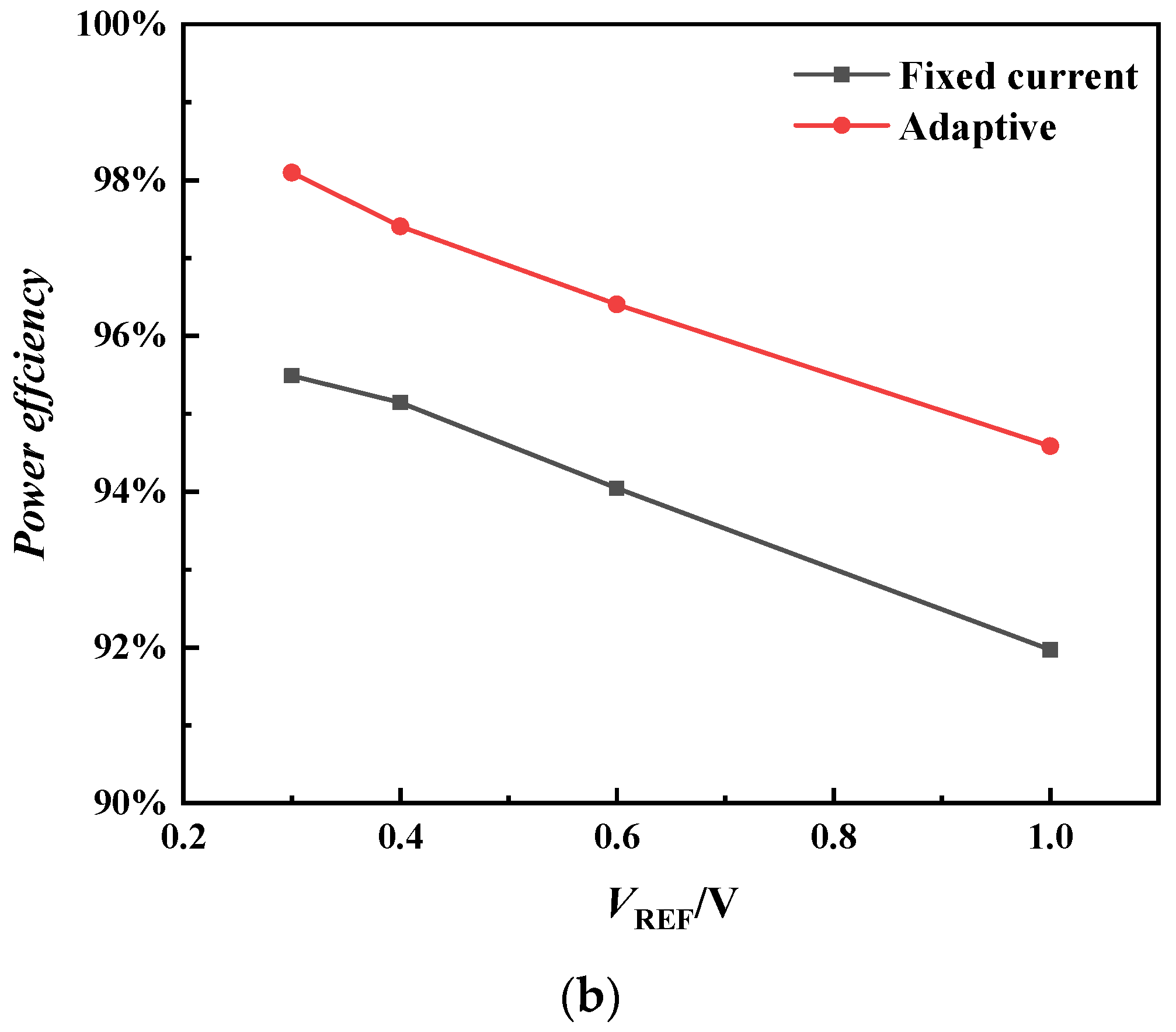
3.3. Measurement Results
4. Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tsao, J.Y. Solid-state lighting: Lamps, chips, and materials for tomorrow. IEEE Circuits Devices Mag. 2004, 20, 28–37. [Google Scholar] [CrossRef]
- Yadlapalli, R.T.; Narasipuram, R.P.; Kotapati, A. An overview of energy efficient solid state LED driver topologies. Int. J. Energy Res. 2020, 44, 612–630. [Google Scholar] [CrossRef]
- Morrow, R.C. LED lighting in horticulture. HortScience 2008, 43, 1947–1950. [Google Scholar] [CrossRef]
- Cho, J.; Park, J.H.; Kim, J.K.; Schubert, E.F. White light-emitting diodes: History, progress, and future. Laser Photonics Rev. 2017, 11, 1600147. [Google Scholar] [CrossRef]
- Surkanti, P.R.; Mehrotra, D.; Furth, P.M. Multi-channel LED driver with accurate current matching for portable applications. In Proceedings of the 2019 IEEE 62nd International Midwest Symposium on Circuits and Systems (MWSCAS), Dallas, TX, USA, 4–7 August 2019; pp. 941–944. [Google Scholar]
- Pal, N.; Fish, A.; McIntyre, W.; Griesert, N.; Winter, G.; Eichhorn, T.; Pilawa-Podgurski, R.; Hanumolu, P.K. A 91% efficient 30 V hybrid boost-SC converter based backlight LED driver in 180 nm CMOS. In Proceedings of the 2020 IEEE Custom Integrated Circuits Conference (CICC), Boston, MA, USA, 22–25 March 2020; pp. 1–4. [Google Scholar]
- Pressman, A. Switching Power Supply Design; McGraw-Hill, Inc.: New York, NY, USA, 1997. [Google Scholar]
- Wang, Y.; Alonso, J.M.; Ruan, X. A review of LED drivers and related technologies. IEEE Trans. Ind. Electron. 2017, 64, 5754–5765. [Google Scholar] [CrossRef]
- Gupta, N.; Verma, D. A review and analysis of topologies of light emitting diode (LED) drivers. In Proceedings of the 2021 IEEE 2nd International Conference on Electrical Power and Energy Systems (ICEPES), Bhopal, India, 10–11 December 2021; pp. 1–6. [Google Scholar]
- Oh, T.-J.; Cho, A.; Ki, S.-L.; Hwang, I.-C. A low-power and low-cost digitally-controlled boost LED driver IC for backlights. In Proceedings of the 2012 IEEE Asian Solid State Circuits Conference (A-SSCC), Kobe, Japan, 12–14 November 2012; pp. 237–240. [Google Scholar]
- Lee, S.-W.; Choe, H.-J.; Yun, J.-J. Performance improvement of a boost LED driver with high voltage gain for edge-lit LED backlights. IEEE Trans. Circuits Syst. II Express Briefs 2017, 65, 481–485. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, Y.; Ma, D. A SIMO parallel-string driver IC for dimmable LED backlighting with local bus voltage optimization and single time-shared regulation loop. IEEE Trans. Power Electron. 2011, 27, 452–462. [Google Scholar] [CrossRef]
- Kim, H.-C.; Yoon, C.S.; Jeong, D.-K.; Kim, J. A single-inductor, multiple-channel current-balancing LED driver for display backlight applications. IEEE Trans. Ind. Appl. 2014, 50, 4077–4081. [Google Scholar] [CrossRef]
- Chen, J.-H.; Wang, S.-C.; Liu, Y.-H.; Cheng, Y.-S.; Yang, Z.-Z. RGB LED backlight driving system with dynamic voltage regulation capability. In Proceedings of the 2013 IEEE 10th International Conference on Power Electronics and Drive Systems (PEDS), Kitakyushu, Japan, 22–25 April 2013; pp. 349–353. [Google Scholar]
- Liu, P.-J.; Hong, Z.-Y.; Hung, C.-C. A single-stage low-power AC–DC RGB-LED driver with switching capacitor control scheme. IEEE Trans. Ind. Electron. 2020, 68, 3103–3112. [Google Scholar] [CrossRef]
- Kim, J.-S.; Lee, Y.-K.; Lee, J.-S.; Shin, Y.-K.; Tark, J.-H.; Ryu, K.-C.; Yang, B.-D. A fast-switching current-pulse driver for LED backlight. In Proceedings of the 2009 IEEE International Symposium on Circuits and Systems, Taipei, Taiwan, 24–27 May 2009; pp. 1775–1778. [Google Scholar]
- Hong, S.-I.; Han, J.-W.; Kim, D.-H.; Kwon, O.-K. A double-loop control LED backlight driver IC for medium-sized LCDs. In Proceedings of the 2010 IEEE International Solid-State Circuits Conference-(ISSCC), San Francisco, CA, USA, 7–11 February 2010; pp. 116–117. [Google Scholar]
- Huang, Y.-C.; Chen, H.-W. A novel fast-switching current-pulse driver for LED backlight applications. In Proceedings of the 2016 IEEE International Conference on Consumer Electronics-Taiwan (ICCE-TW), Nantou, Taiwan, 27–29 May 2016; pp. 1–2. [Google Scholar]
- Ahn, H.-A.; Hong, S.-K.; Kwon, O.-K. A fast switching current regulator using slewing time reduction method for high dimming ratio of LED backlight drivers. IEEE Trans. Circuits Syst. II Express Briefs 2016, 63, 1014–1018. [Google Scholar] [CrossRef]
- Han, H.; Zhang, F.; Liu, M. PWM dimming method for capacitor-clamped current-sharing circuit in LED backlight system. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1190–1197. [Google Scholar] [CrossRef]
- Hong, S.-I.; Nam, K.-S.; Jung, Y.-H.; Ahn, H.-A.; In, H.-J.; Kwon, O.-K. Highly power-efficient and reliable light-emitting diode backlight driver IC for the uniform current driving of medium-sized liquid crystal displays. J. Inf. Disp. 2012, 13, 73–82. [Google Scholar] [CrossRef]
- Lim, B.-M.; Ko, Y.-H.; Jang, Y.-S.; Kwon, O.-H.; Han, S.-K.; Lee, S.-G. A 200-V 98.16%-efficiency buck LED driver using integrated current control to improve current accuracy for large-scale single-string LED backlighting applications. IEEE Trans. Power Electron. 2015, 31, 6416–6427. [Google Scholar] [CrossRef]
- Parthasarathy, M.K.; Ganesan, N. A novel single-inductor eight-channel light-emitting diode driver for low power display backlight applications. Turk. J. Electr. Eng. Comput. Sci. 2018, 26, 2130–2139. [Google Scholar] [CrossRef]
- He, J.-P.; Zhang, B.; Gao, X.; Wu, C.-D.; Li, Z.-J.; Zhou, J.-Y. A high accuracy weak voltage LED analog dimming method. IEEE Access 2019, 7, 172362–172373. [Google Scholar] [CrossRef]
- Lin, C.-L.; Chen, S.-C.; Deng, M.-Y.; Ho, Y.-H.; Lin, C.-A.; Tsai, C.-L.; Liao, W.-S.; Liu, C.-I.; Wu, C.-E.; Peng, J.-T. AM PWM driving circuit for mini-LED backlight in liquid crystal displays. IEEE J. Electron Devices Soc. 2021, 9, 365–372. [Google Scholar] [CrossRef]
- Schubert, E.F. Light-Emitting Diodes (2018); Rensselaer Polytechnic Institute: Tory, NY, USA, 2018. [Google Scholar]
- Liu, C.-H.; Hsieh, C.-Y.; Hsieh, Y.-C.; Tai, T.-J.; Chen, K.-H. SAR-controlled adaptive off-time technique without sensing resistor for achieving high efficiency and accuracy LED lighting system. IEEE Trans. Circuits Syst. I Regul. Pap. 2009, 57, 1384–1394. [Google Scholar]
- Lohaus, L.; Rossius, A.; Dietrich, S.; Wunderlich, R.; Heinen, S. A dimmable LED driver using resistive DAC feedback control for adaptive voltage regulation. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 3126–3133. [Google Scholar]
- Hsieh, C.-Y.; Wei, Y.-S.; Chen, K.-H.; Lin, T.-C. Efficienct LED driver with an adaptive reference tracking technique. In Proceedings of the 2009 16th IEEE International Conference on Electronics, Circuits and Systems-(ICECS 2009), Yasmine Hammamet, Tunisia, 13–16 December 2009; pp. 291–294. [Google Scholar]
- Liu, P.-J.; Hsu, S.-R.; Chang, C.-W.; Liao, C.-Y.; Chien, L.-H. Dimmable white LED driver with adaptive voltage feedback control. In Proceedings of the 2015 IEEE 2nd International Future Energy Electronics Conference (IFEEC), Taipei, Taiwan, 1–4 November 2015; pp. 1–4. [Google Scholar]
- Jung, Y.H.; Hong, S.K.; Kwon, O.K. A fast transient LED driver with adaptive frequency control according to load variation for large-sized LCD backlights. J. Soc. Inf. Disp. 2017, 25, 712–724. [Google Scholar] [CrossRef]
- Hsu, Y.-C.; Lin, J.-Y.; Chen, C.C.-P. Area-saving and high-efficiency RGB LED driver with adaptive driving voltage and energy-saving technique. Energies 2018, 11, 1422. [Google Scholar] [CrossRef]
- Yong, W.; Baoxing, D.; Yi, L.; Ting, L.; Yintang, Y. A Multi-channel High Efficiency Boost LED Backlight Driver with High Dimming Ratio. In Proceedings of the 2017 International Conference on Electronic Industry and Automation (EIA 2017), Suzhou, China, 23–25 June 2017; pp. 110–116. [Google Scholar]
- Hsieh, Y.-T.; Liu, B.-D.; Wu, J.-F.; Fang, C.-L.; Tsai, H.-H.; Juang, Y.-Z. A high-dimming-ratio LED driver for LCD backlights. IEEE Trans. Power Electron. 2012, 27, 4562–4570. [Google Scholar] [CrossRef]
- Chiu, H.-J.; Lo, Y.-K.; Chen, J.-T.; Cheng, S.-J.; Lin, C.-Y.; Mou, S.-C. A high-efficiency dimmable LED driver for low-power lighting applications. IEEE Trans. Ind. Electron. 2009, 57, 735–743. [Google Scholar] [CrossRef]
- Hu, Y.; Jiang, L.; Wen, W.; Yan, W.; Ding, R. A new adaptive drive voltage approach for LED driver. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 721–726. [Google Scholar]
- Wu, C.-H.; Chen, C.-L. High-efficiency current-regulated charge pump for a white LED driver. IEEE Trans. Circuits Syst. II Express Briefs 2009, 56, 763–767. [Google Scholar]
- Mu, H.; Geng, L.; Liu, J. A high precision constant current source applied in LED driver. In Proceedings of the 2011 Symposium on Photonics and Optoelectronics (SOPO), Wuhan, China, 16–18 May 2011; pp. 1–4. [Google Scholar]
- Sansen, W.M. Analog Design Essentials; Springer Science & Business Media: Berlin, Germany, 2007; Volume 859. [Google Scholar]
- Hogervorst, R.; Tero, J.P.; Eschauzier, R.G.; Huijsing, J.H. A compact power-efficient 3 V CMOS rail-to-rail input/output operational amplifier for VLSI cell libraries. IEEE J. Solid-State Circuits 1994, 29, 1505–1513. [Google Scholar] [CrossRef]
- Surkanti, P.R.; Mehrotra, D.; Gangineni, M.; Furth, P.M. Multi-string LED driver with accurate current matching and dynamic cancellation of forward voltage mismatch. In Proceedings of the 2017 IEEE 60th International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; pp. 229–232. [Google Scholar]
- Shahroury, F.R.; Ahmad, H.H.; Abuishmais, I. Design Aspects of a Single-Output Multi-String WLED Driver Using 40 nm CMOS Technology. J. Low Power Electron. Appl. 2022, 12, 5. [Google Scholar] [CrossRef]
- Abuishmais, I.; Shahroury, F.R.; Ahmad, H. A Design Methodology of High-Efficiency Dimmable Current Sink for Current-Regulated Drivers. Electronics 2022, 11, 2566. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | [17] | [41] | [42] | [43] | This work |
| Process | 0.35 μm BCD | 0.5 μm CMOS | 40 nm CMOS | 40 nm CMOS | 0.18 μm CMOS |
| Core area (mm2) | N/A + | N/A + | N/A + | N/A + | 0.1 |
| Power supply (V) | 6–27 | 3–4.2 | 3.2–4.2 | 3.2–4.2 | 5 |
| Maximum ILED (mA) | 30 | 20 | 25 | 25 | 48 |
| LED chain config. | 8 | 2 | 6 | 6 | 6 |
| Vboost (V) | 26.41 | 5.36 | 22.5 | 20 | 18.96 * |
| Vloss (mV) | ~400 | ~300 | ~675 | ~480 | 360 * |
| Power Efficiency | 98.4% | 94.4% | 97% | 97.6% | 98.1% * |
| Vboost adjustment | Yes | Yes | Yes | Yes | Yes |
| Channel-by-channel adjustment | No | No | No | No | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, X.; Zhuo, Q.; Jiang, C.; Zhou, Z.; Tang, J.; Zou, W. An Adaptive High-Efficiency LED Backlight Driver. Electronics 2024, 13, 3057. https://doi.org/10.3390/electronics13153057
Xu X, Zhuo Q, Jiang C, Zhou Z, Tang J, Zou W. An Adaptive High-Efficiency LED Backlight Driver. Electronics. 2024; 13(15):3057. https://doi.org/10.3390/electronics13153057
Chicago/Turabian StyleXu, Xinyu, Qiyue Zhuo, Chunhui Jiang, Zichao Zhou, Junlong Tang, and Wanghui Zou. 2024. "An Adaptive High-Efficiency LED Backlight Driver" Electronics 13, no. 15: 3057. https://doi.org/10.3390/electronics13153057