
Electromagnetic Signal Analysis for Electrical Fault Diagnosis in Synchronous Generators

Abstract
:1. Introduction
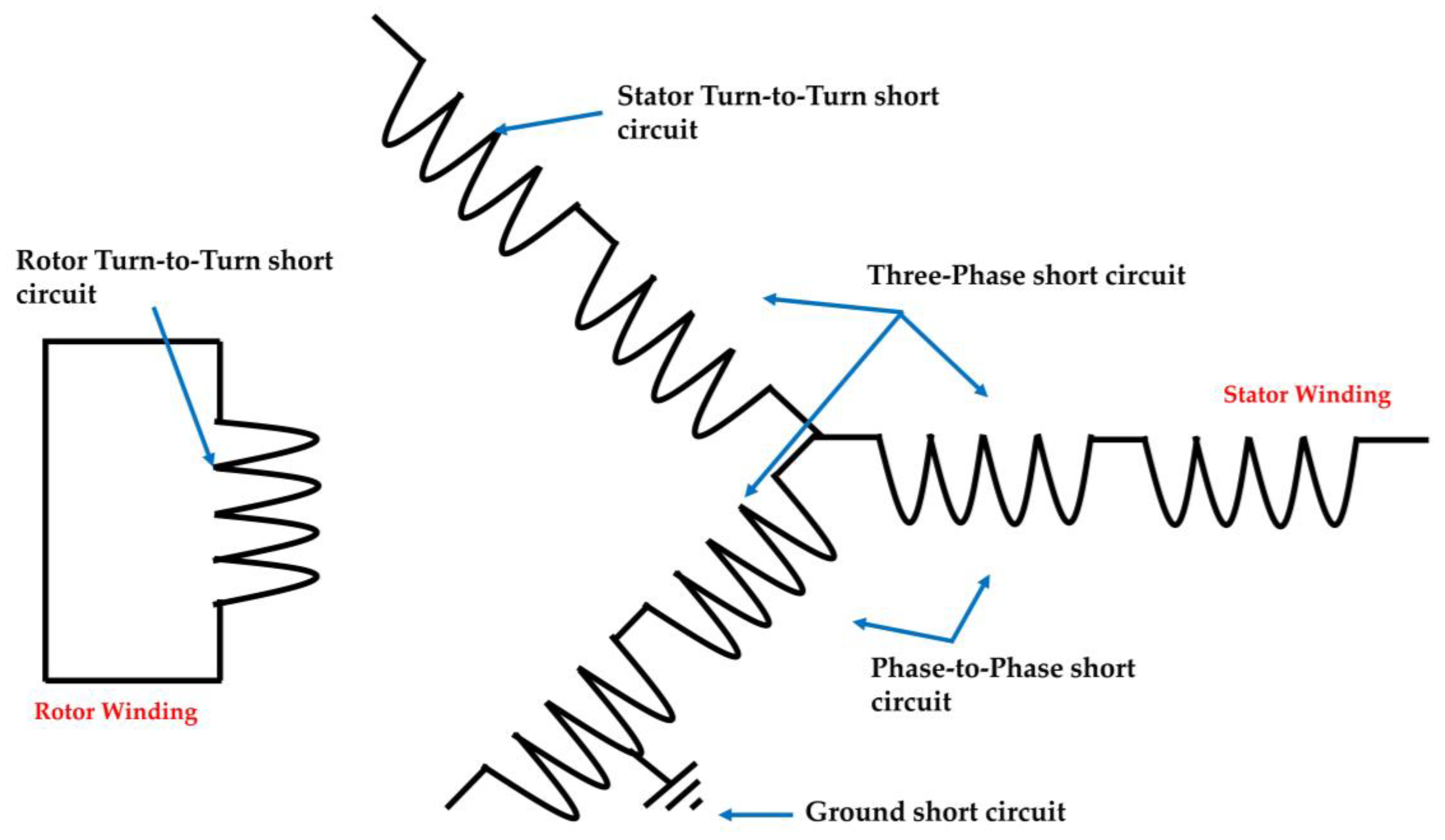
2. Electrical Fault Types in Synchronous Generators
2.1. Stator Winding Faults
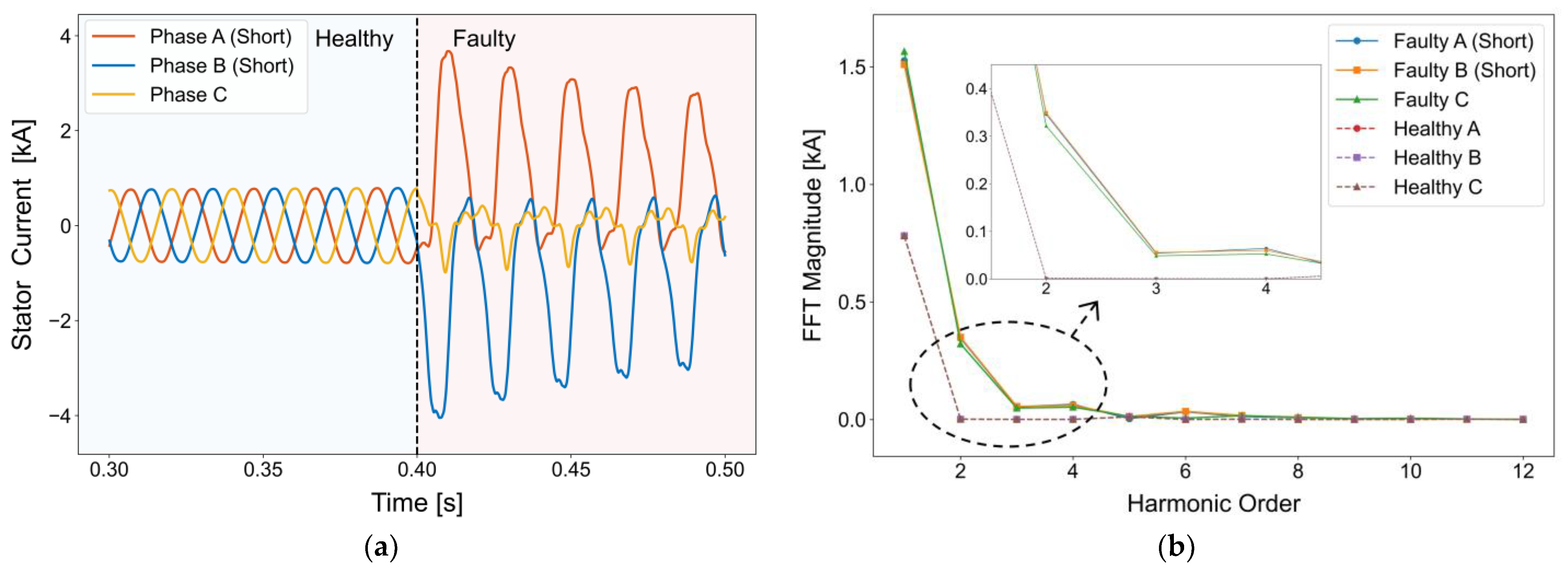
2.1.1. Ground Short Circuit
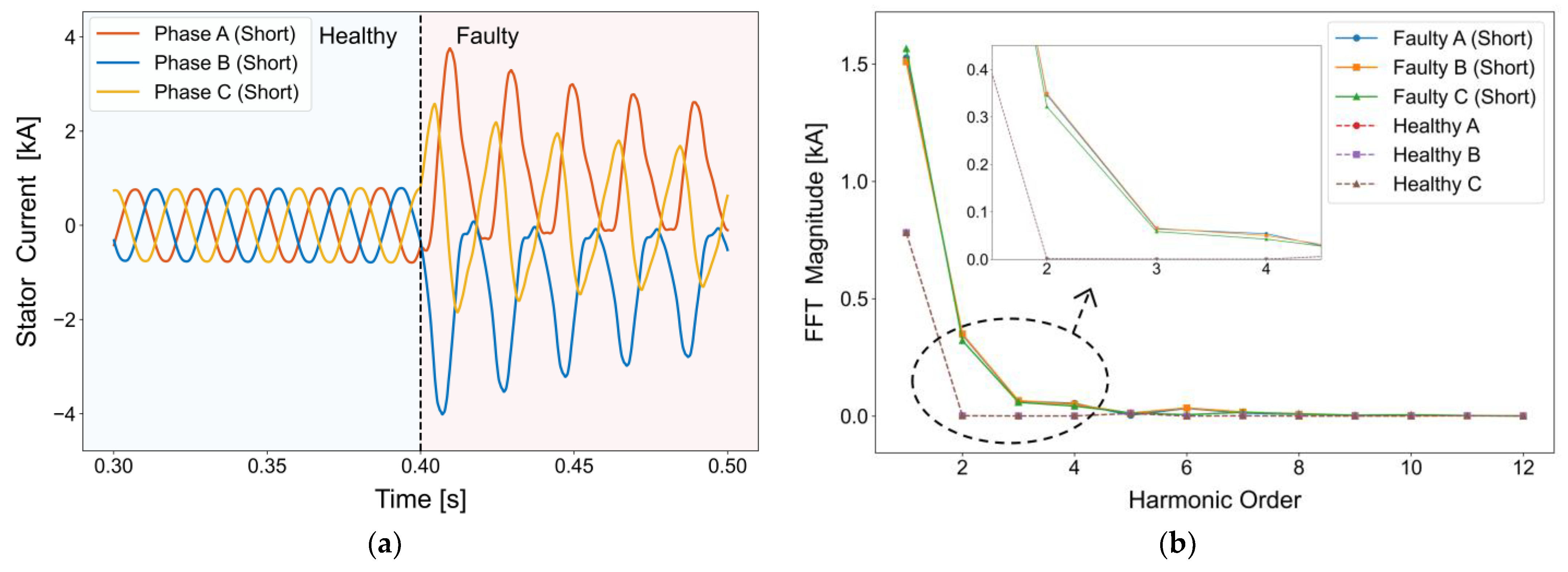
2.1.2. Phase Short Circuit
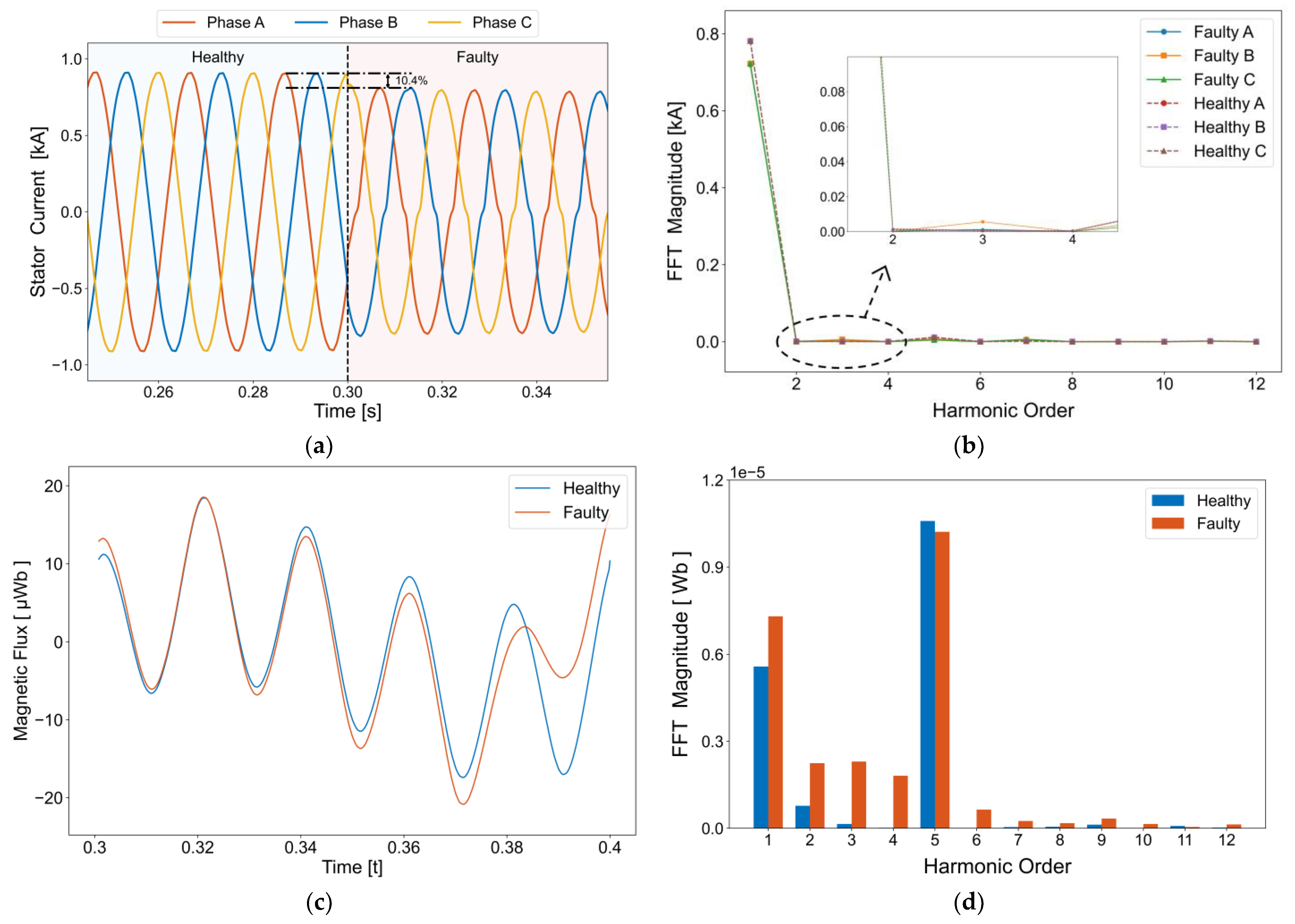
2.1.3. Turn-to-Turn Faults in Stator Windings
2.2. Rotor Winding Faults
3. Electromagnetic Signal Analysis
3.1. Non-Invasive Diagnostic Approaches
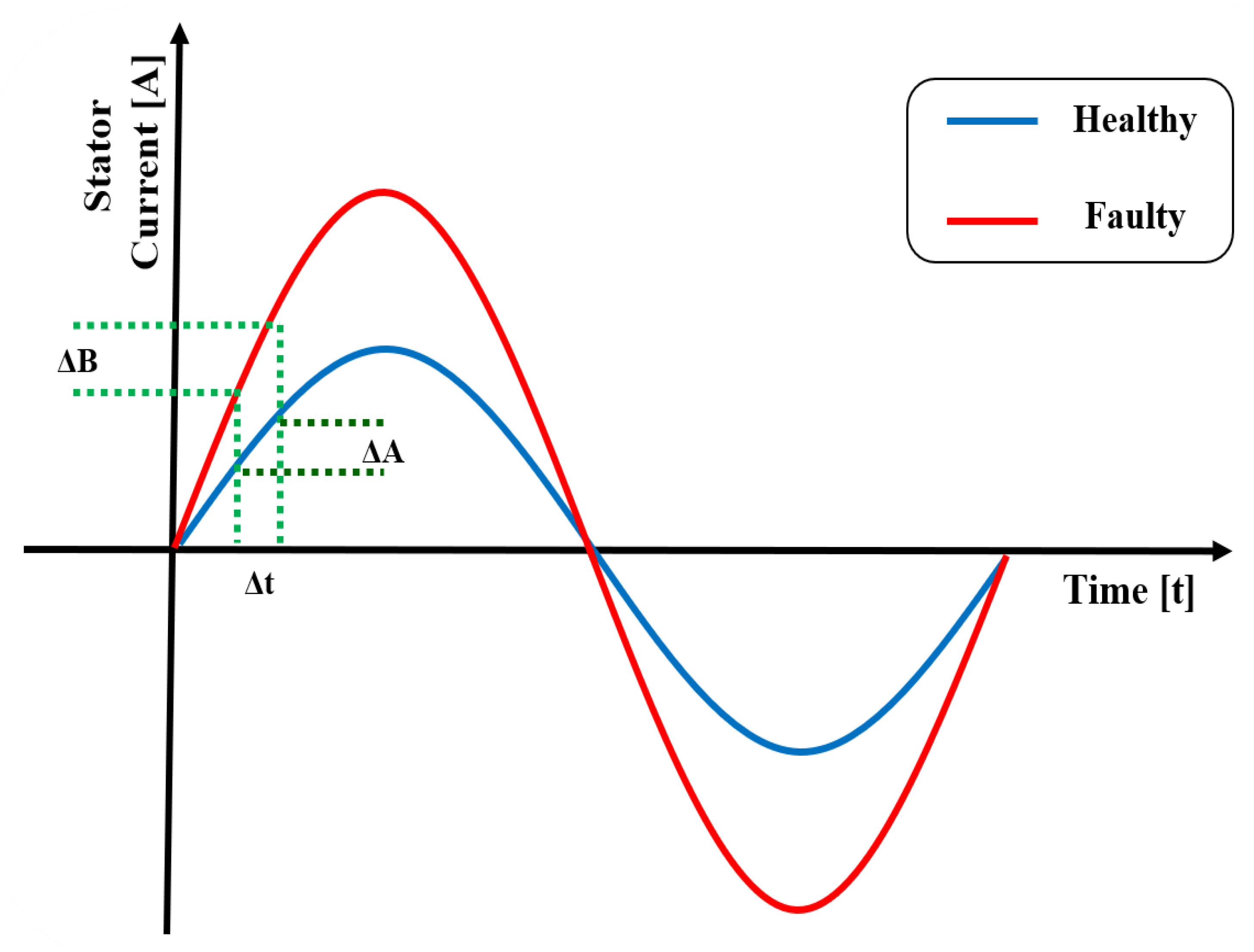
3.1.1. Stator Current Analysis
3.1.2. Stray Magnetic Field Analysis
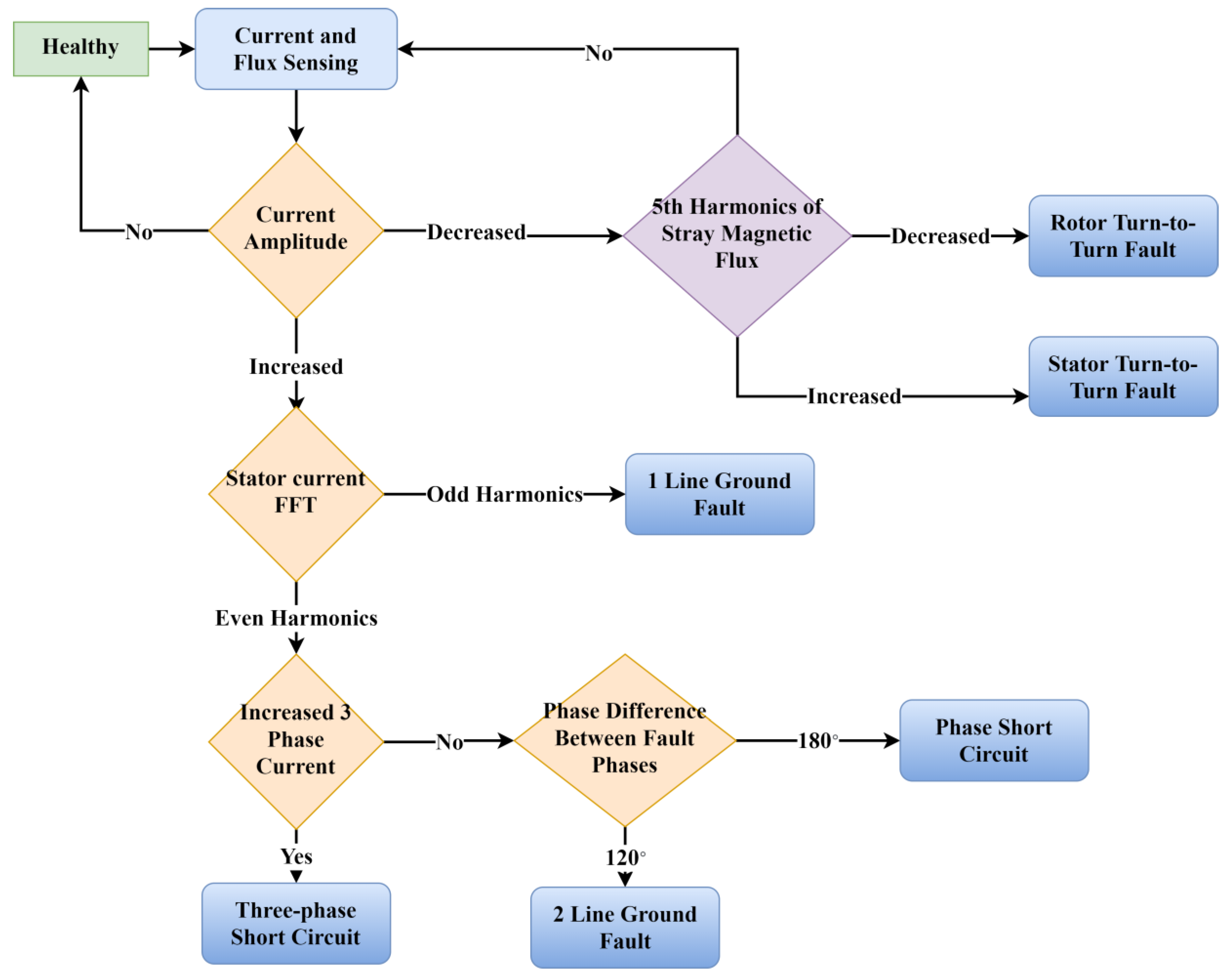
3.2. Fault Diagnosis Techniques in Synchronous Generators
3.2.1. Implementation of Fault Diagnosis Algorithm
3.2.2. Stator Current Amplitude Analysis
3.2.3. FFT Analysis for Stator Current and Stray Magnetic Flux
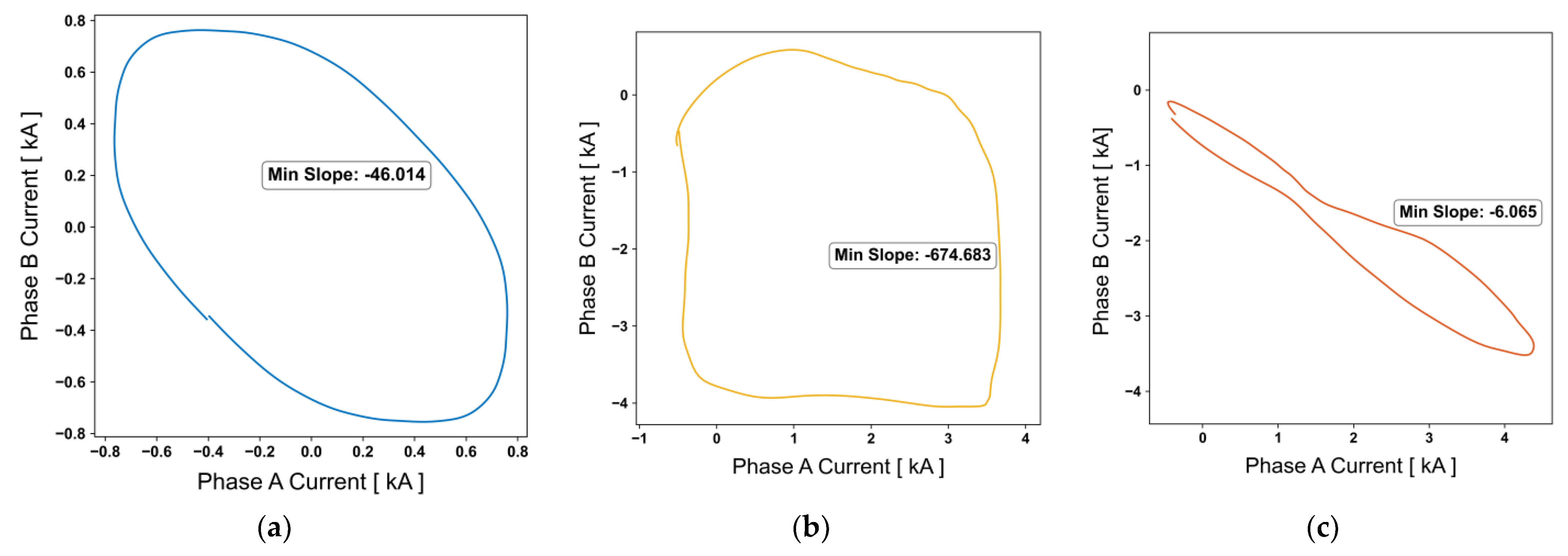
3.2.4. Phase Shift Analysis for Stator Currents
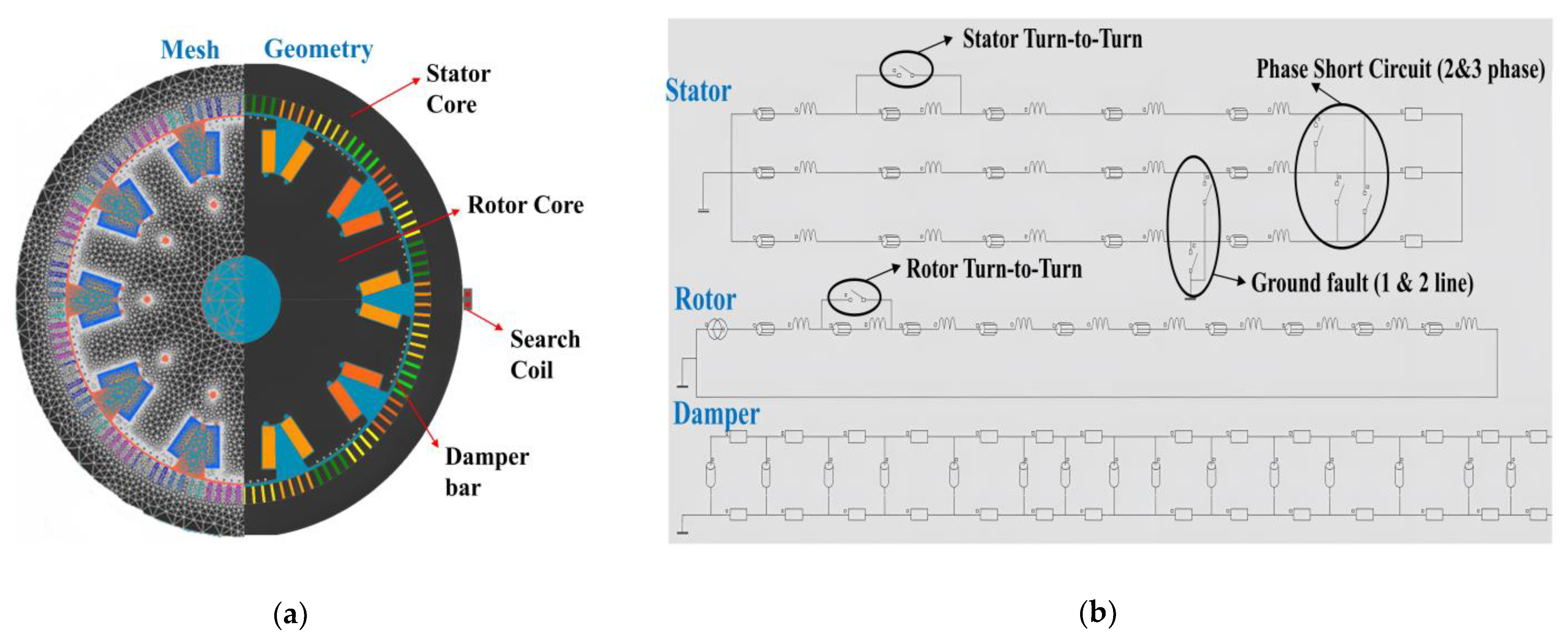
4. FEM Simulation Validation
4.1. Simulation Setup
4.2. Simulation Results
4.2.1. Ground Short Circuit
4.2.2. Phase Short Circuit
4.2.3. Stator Turn-to-Turn Short Circuit
4.2.4. Rotor Turn-to-Turn Short Circuit
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Karatuğ, Ç.; Arslanoğlu, Y. Development of Condition-Based Maintenance Strategy for Fault Diagnosis for Ship Engine Systems. Ocean Eng. 2022, 256, 111515. [Google Scholar] [CrossRef]
- Salomon, C.P.; Ferreira, C.; Sant’Ana, W.C.; Lambert-Torres, G.; Borges Da Silva, L.E.; Bonaldi, E.L.; De Oliveira, L.E.D.L.; Torres, B.S. A Study of Fault Diagnosis Based on Electrical Signature Analysis for Synchronous Generators Predictive Maintenance in Bulk Electric Systems. Energies 2019, 12, 1506. [Google Scholar] [CrossRef]
- Verginadis, D.; Antonino-Daviu, J.A.; Karlis, A.; Danikas, M.G. Determination of the Insulation Condition in Synchronous Generators: Industrial Methods and A Case Study. IEEE Ind. Appl. Mag. 2022, 28, 67–77. [Google Scholar] [CrossRef]
- Lee, S.B.; Tallam, R.M.; Habetler, T.G. A Robust, on-Line Turn-Fault Detection Technique for Induction Machines Based on Monitoring the Sequence Component Impedance Matrix. IEEE Trans. Power Electron. 2003, 18, 865–872. [Google Scholar] [CrossRef]
- Nandi, S. Detection of Stator Faults in Induction Machines Using Residual Saturation Harmonics. In Proceedings of the IEEE International Conference on Electric Machines and Drives, San Antonio, TX, USA, 15 May 2005; IEEE: San Antonio, TX, USA, 2005; pp. 256–263. [Google Scholar]
- Jie, H.; See, K.Y.; Chang, Y.; Gao, R.X.-K.; Fan, F.; Zhao, Z. Enhancing Motor Impedance Measurements: Broadening the Spectrum from Low to High Frequencies. Meas. Sci. Technol. 2024, 35, 086008. [Google Scholar] [CrossRef]
- Fan, F.; Zhao, Z.; Jie, H.; Sun, Q.; Tu, P.; Shu, Z.; Wang, W.; See, K.Y. Impact of Motor Stator Winding Faults on Motor Differential-Mode Impedance and Mode Transformation. Chin. J. Electr. Eng. 2022, 8, 12–21. [Google Scholar] [CrossRef]
- Tavner, P.J. Review of Condition Monitoring of Rotating Electrical Machines. IET Electr. Power Appl. 2008, 2, 215–247. [Google Scholar] [CrossRef]
- Sdid, M.S.N.; Benbouzid, M.E.H. H-G Diagram Based Rotor Parameters Identification for Induction Motors Thermal Monitoring. IEEE Trans. Energy Convers. 2000, 15, 14–18. [Google Scholar] [CrossRef]
- Sadeghi, I.; Ehya, H.; Faiz, J.; Ostovar, H. Online Fault Diagnosis of Large Electrical Machines Using Vibration Signal-a Review. In Proceedings of the 2017 International Conference on Optimization of Electrical and Electronic Equipment (OPTIM) & 2017 Intl Aegean Conference on Electrical Machines and Power Electronics (ACEMP), Brasov, Romania, 25–27 May 2017; IEEE: Brasov, Romania, 2017; pp. 470–475. [Google Scholar]
- Wang, T.; Han, Q.; Chu, F.; Feng, Z. Vibration Based Condition Monitoring and Fault Diagnosis of Wind Turbine Planetary Gearbox: A Review. Mech. Syst. Signal Process. 2019, 126, 662–685. [Google Scholar] [CrossRef]
- Osornio-Rios, R.A.; Zamudio-Ramírez, I.; Jaen-Cuellar, A.Y.; Antonino-Daviu, J.; Dunai, L. Data Fusion System for Electric Motors Condition Monitoring: An Innovative Solution. IEEE Ind. Electron. Mag. 2023, 17, 4–16. [Google Scholar] [CrossRef]
- Sadeghi, I.; Ehya, H.; Faiz, J.; Akmal, A.A.S. Online Condition Monitoring of Large Synchronous Generator under Short Circuit Fault—A Review. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 20–22 February 2018; IEEE: Lyon, France, 2018; pp. 1843–1848. [Google Scholar]
- Neti, P.; Nandi, S. Stator Interturn Fault Detection of Synchronous Machines Using Field Current and Rotor Search-Coil Voltage Signature Analysis. IEEE Trans. Ind. Appl. 2009, 45, 911–920. [Google Scholar] [CrossRef]
- Mirafzal, B.; Povinelli, R.J.; Demerdash, N.A.O. Interturn Fault Diagnosis in Induction Motors Using the Pendulous Oscillation Phenomenon. IEEE Trans. Energy Convers. 2006, 21, 871–882. [Google Scholar] [CrossRef]
- Tallam, R.M.; Lee, S.B.; Stone, G.C.; Kliman, G.B.; Yoo, J.; Habetler, T.G.; Harley, R.G. A Survey of Methods for Detection of Stator-Related Faults in Induction Machines. IEEE Trans. Ind. Appl. 2007, 43, 920–933. [Google Scholar] [CrossRef]
- Burriel-Valencia, J.; Puche-Panadero, R.; Martinez-Roman, J.; Sapena-Bano, A.; Pineda-Sanchez, M.; Perez-Cruz, J.; Riera-Guasp, M. Automatic Fault Diagnostic System for Induction Motors under Transient Regime Optimized with Expert Systems. Electronics 2018, 8, 6. [Google Scholar] [CrossRef]
- Kliman, G.B.; Premerlani, W.J.; Koegl, R.A.; Hoeweler, D. A New Approach to On-Line Turn Fault Detection in AC Motors. In Proceedings of the IAS ’96. Conference Record of the 1996 IEEE Industry Applications Conference Thirty-First IAS Annual Meeting, San Diego, CA, USA, 6–10 October 1996; IEEE: San Diego, CA, USA, 1996; Volume 1, pp. 687–693. [Google Scholar]
- Ma, H.; Li, H.; Wei, S.; Ju, P.; Zhang, L. Transient Analysis of Synchronous Generator with Stator Winding Faults Based on Starting Process. In Proceedings of the 2008 Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies, Nanjing, China, 6–9 April 2008; IEEE: Nanjing, China, 2008; pp. 1927–1932. [Google Scholar]
- Madonna, V.; Walker, A.; Giangrande, P.; Serra, G.; Gerada, C.; Galea, M. Improved Thermal Management and Analysis for Stator End-Windings of Electrical Machines. IEEE Trans. Ind. Electron. 2019, 66, 5057–5069. [Google Scholar] [CrossRef]
- Ehya, H.; Nysveen, A. Pattern Recognition of Interturn Short Circuit Fault in a Synchronous Generator Using Magnetic Flux. IEEE Trans. Ind. Appl. 2021, 57, 3573–3581. [Google Scholar] [CrossRef]
- Ehya, H.; Faiz, J. Electromagnetic Signature Analysis of Electrical Faults, 1st ed.; Wiley: New York, NY, USA, 2022; ISBN 978-1-119-63607-6. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Type | Frequency Variation Pattern | Notes |
|---|---|---|
| Stator Single-Line Ground Fault | Odd harmonics is power supply frequency | |
| Stator Two-Line Ground Fault | Even harmonics | |
| Phase-to-Phase Short Circuit | - | |
| Three-Phase Short Circuit | - | |
| Stator Turn-to-Turn Short Circuit | is rotation frequency m is number of pole pairs | |
| Rotor Turn-to-Turn Short Circuit | - |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated Power (kVA) | 6400 | Radial Air-gap Length (mm) | 20 |
| Pole Pairs | 5 | Stator outer diameter (mm) | 2700 |
| Stator Slots | 120 | Stator inner diameter (mm) | 2120 |
| Rated Voltage (V) | 4600 | Rotor core outer diameter (mm) | 2080 |
| Load (Ohms) | 7 | Rotor core inner diameter (mm) | 500 |
| Rated Rotor Current (A) | 230 | Stack length (mm) | 800 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Harmony, P.N.; Moon, H.; Baek, J. Electromagnetic Signal Analysis for Electrical Fault Diagnosis in Synchronous Generators. Electronics 2024, 13, 3078. https://doi.org/10.3390/electronics13153078
Park J, Harmony PN, Moon H, Baek J. Electromagnetic Signal Analysis for Electrical Fault Diagnosis in Synchronous Generators. Electronics. 2024; 13(15):3078. https://doi.org/10.3390/electronics13153078
Chicago/Turabian StylePark, Junki, Peter Nkwocha Harmony, Hyoungjun Moon, and Jeihoon Baek. 2024. "Electromagnetic Signal Analysis for Electrical Fault Diagnosis in Synchronous Generators" Electronics 13, no. 15: 3078. https://doi.org/10.3390/electronics13153078