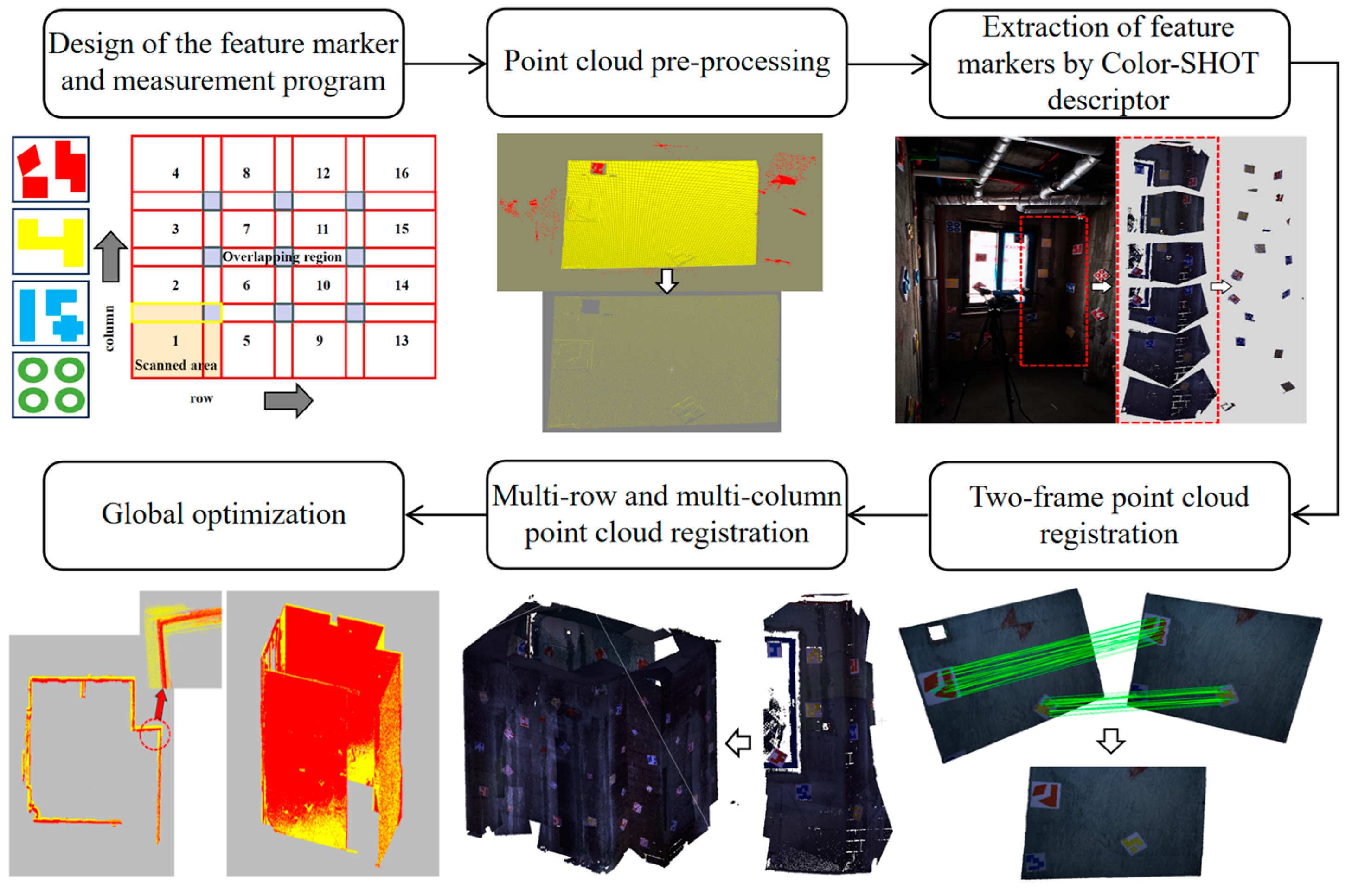
Figure 1.
Flowchart of our method.
Figure 1.
Flowchart of our method.
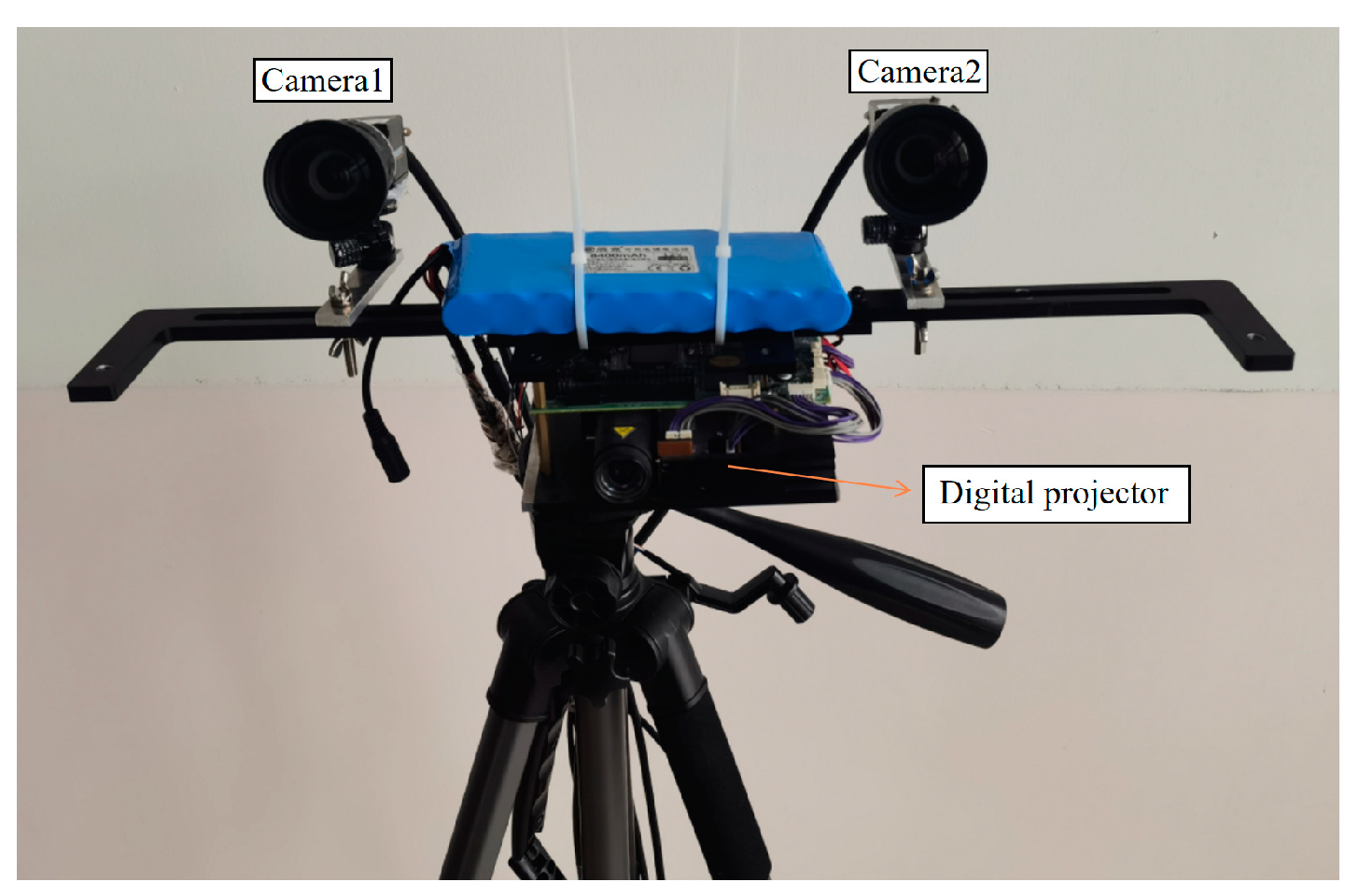
Figure 2.
Measuring equipment structure diagram.
Figure 2.
Measuring equipment structure diagram.
Figure 3.
Scanning process for our structured light device to obtain a single wall point cloud.
Figure 3.
Scanning process for our structured light device to obtain a single wall point cloud.
Figure 4.
Two-dimensional graphic design of feature markers. (a) Red marker. (b) Blue marker. (c) Yellow marker. (d) Green marker.
Figure 4.
Two-dimensional graphic design of feature markers. (a) Red marker. (b) Blue marker. (c) Yellow marker. (d) Green marker.
Figure 5.
Photo of the feature marker of the designed double-layer structure.
Figure 5.
Photo of the feature marker of the designed double-layer structure.
Figure 6.
Deployment diagram of feature markers.
Figure 6.
Deployment diagram of feature markers.
Figure 7.
Original point cloud without filtering.
Figure 7.
Original point cloud without filtering.
Figure 8.
The result of the first radius filtering.
Figure 8.
The result of the first radius filtering.
Figure 9.
The final filtering result.
Figure 9.
The final filtering result.
Figure 10.
Results of nearest neighbor downsampling based on edge optimization: (a) point cloud before downsampling; (b) downsampling point cloud.
Figure 10.
Results of nearest neighbor downsampling based on edge optimization: (a) point cloud before downsampling; (b) downsampling point cloud.
Figure 11.
The extraction result of the feature marker.
Figure 11.
The extraction result of the feature marker.
Figure 12.
A Color-SHOT descriptor histogram of a pair of key points in the feature marker: (a) point cloud of markers in the first frame; (b) point cloud of markers in the second frame.
Figure 12.
A Color-SHOT descriptor histogram of a pair of key points in the feature marker: (a) point cloud of markers in the first frame; (b) point cloud of markers in the second frame.
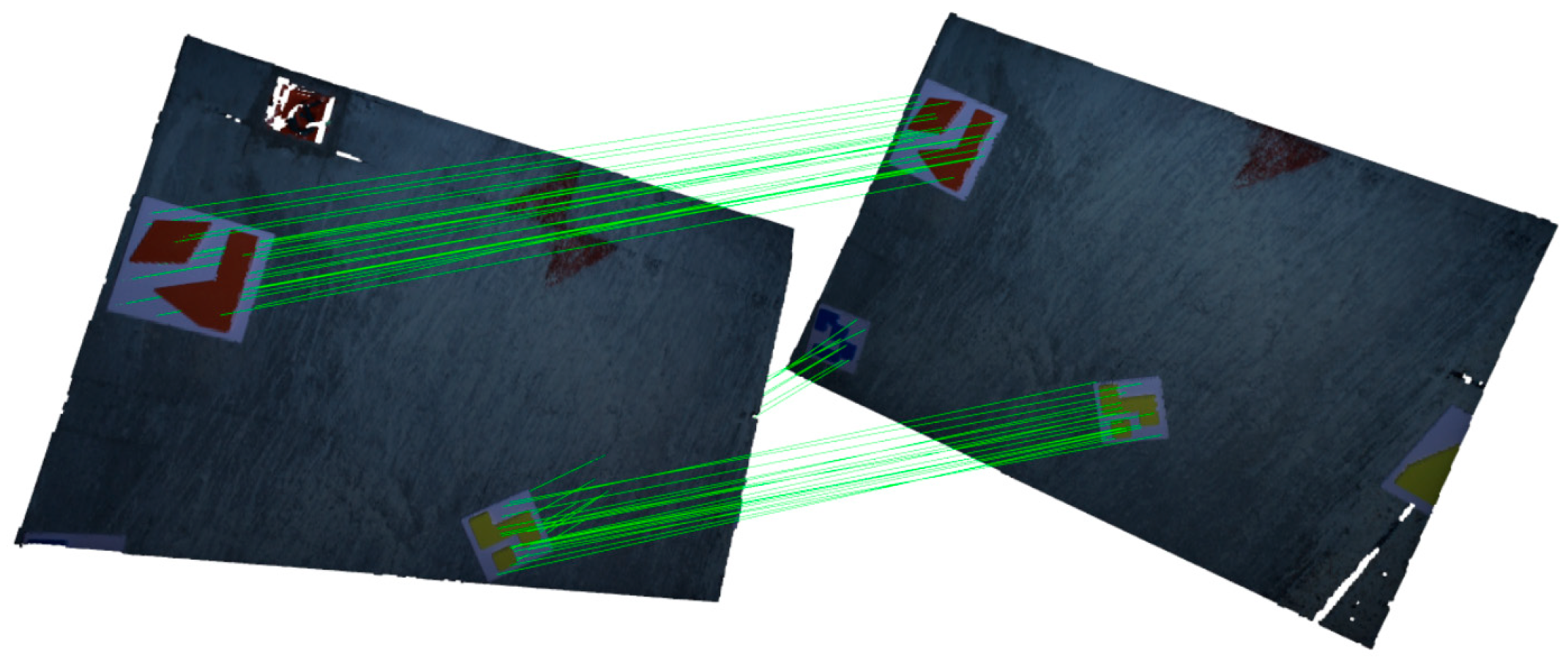
Figure 13.
Point pair matching based on Color-SHOT.
Figure 13.
Point pair matching based on Color-SHOT.
Figure 14.
Point pair matching based on FPFH.
Figure 14.
Point pair matching based on FPFH.
Figure 15.
Matching point pairs based on SC2 and FPFH.
Figure 15.
Matching point pairs based on SC2 and FPFH.
Figure 16.
Matching point pairs based on SC2 and Color-SHOT.
Figure 16.
Matching point pairs based on SC2 and Color-SHOT.
Figure 17.
Coarse registration results: (a) based on SC2 and FPFH; (b) based on SC2 and Color-SHOT.
Figure 17.
Coarse registration results: (a) based on SC2 and FPFH; (b) based on SC2 and Color-SHOT.
Figure 18.
The registration results were obtained by using marker-based ICP without coarse registration.
Figure 18.
The registration results were obtained by using marker-based ICP without coarse registration.
Figure 19.
Precise registration results: (a) marker-based ICP registration; (b) overlapping areas ICP registration.
Figure 19.
Precise registration results: (a) marker-based ICP registration; (b) overlapping areas ICP registration.
Figure 20.
Flowchart of the global optimization algorithm.
Figure 20.
Flowchart of the global optimization algorithm.
Figure 21.
Point cloud loop error structure.
Figure 21.
Point cloud loop error structure.
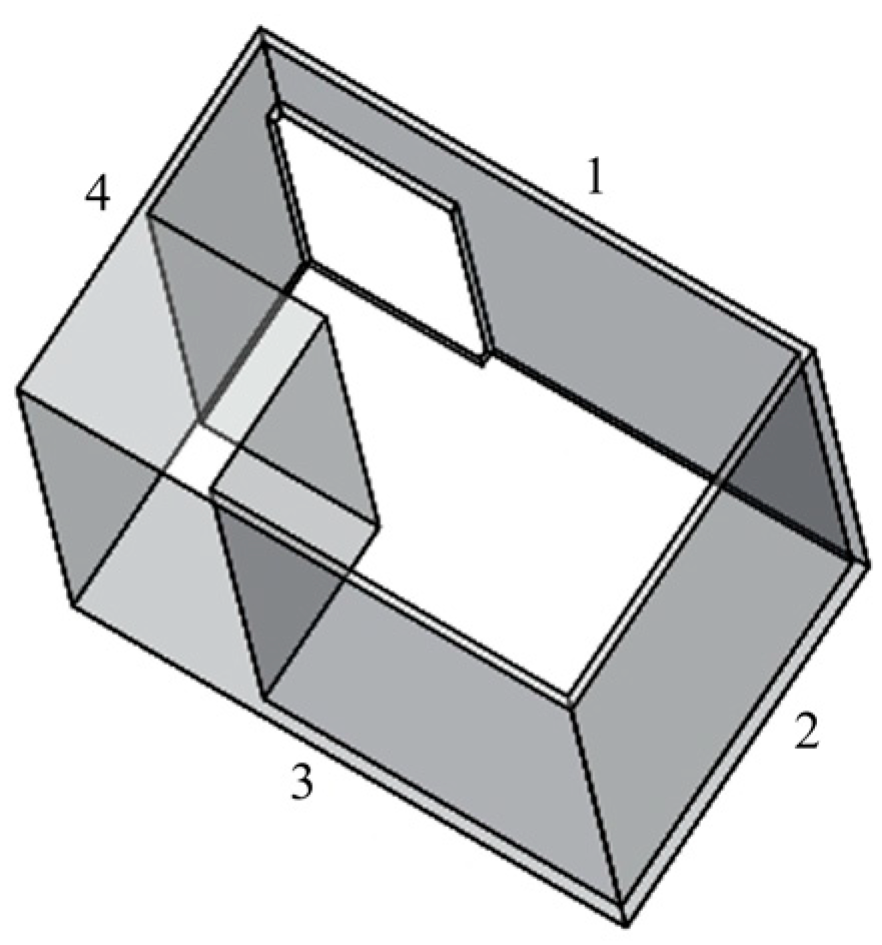
Figure 22.
Experimental scene diagram.
Figure 22.
Experimental scene diagram.
Figure 23.
Interior scene overall outline model.
Figure 23.
Interior scene overall outline model.
Figure 24.
Schematic representation of the point cloud of the column to be registered: (a–f) single-frame point cloud to be registered; (g) practical scenarios for columns to be registered.
Figure 24.
Schematic representation of the point cloud of the column to be registered: (a–f) single-frame point cloud to be registered; (g) practical scenarios for columns to be registered.
Figure 25.
Point cloud registration process for two nearby frames.
Figure 25.
Point cloud registration process for two nearby frames.
Figure 26.
Column point cloud after registration: (a) point cloud without color information; (b) point cloud with color information.
Figure 26.
Column point cloud after registration: (a) point cloud without color information; (b) point cloud with color information.
Figure 27.
Globally optimized point cloud model of indoor scene: (a) top view; (b) isometric view.
Figure 27.
Globally optimized point cloud model of indoor scene: (a) top view; (b) isometric view.
Figure 28.
The reference standard of registration results is obtained by combining the manual labeling and the ICP method: (a) initial location of the point cloud; (b) ideal point cloud registration.
Figure 28.
The reference standard of registration results is obtained by combining the manual labeling and the ICP method: (a) initial location of the point cloud; (b) ideal point cloud registration.
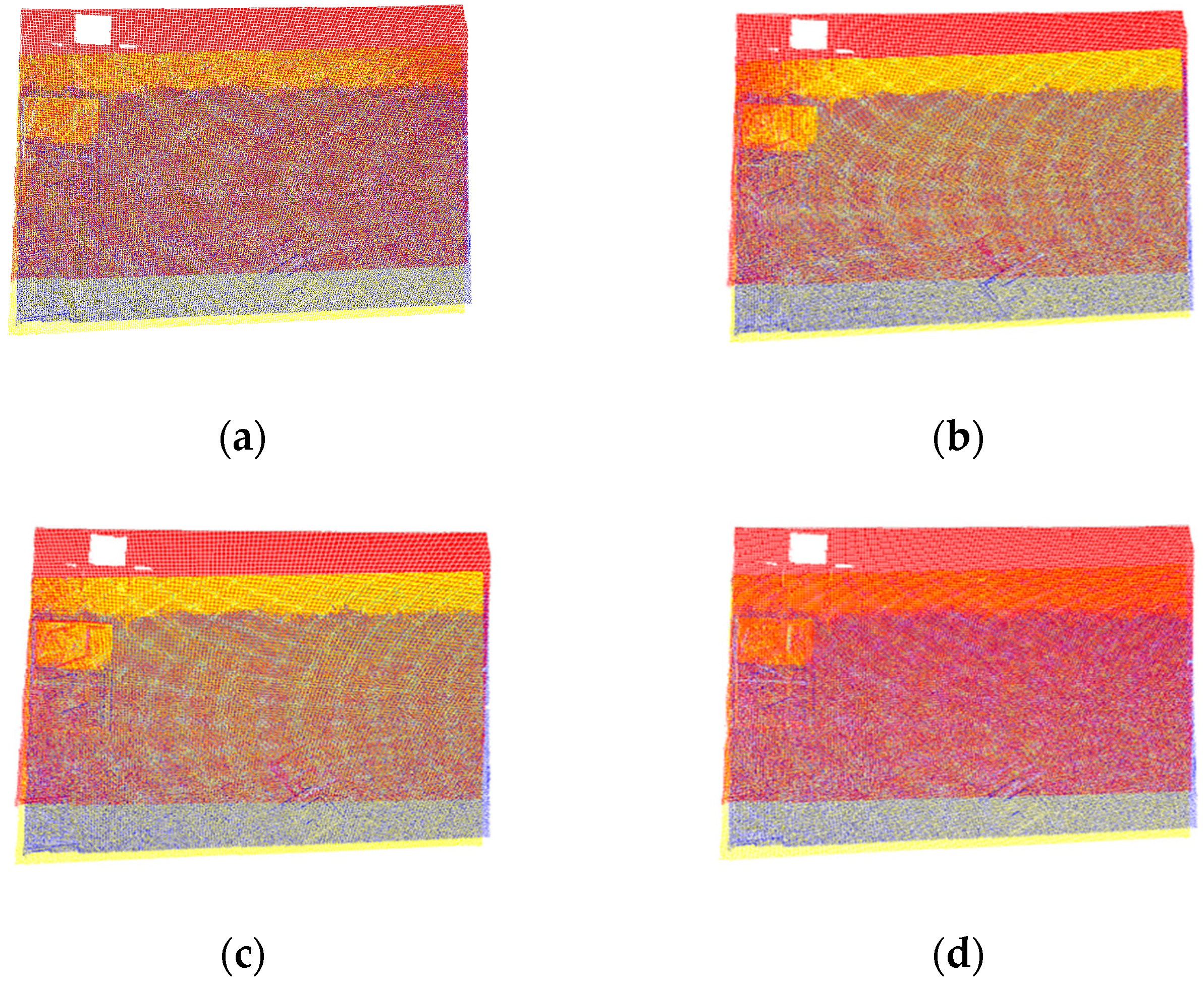
Figure 29.
Comparison of registration algorithm results: (a) FGR; (b) 4PCS; (c) SAC-IA; (d) SC2-PCR; (e) our coarse registration algorithm; (f) our registration algorithm.
Figure 29.
Comparison of registration algorithm results: (a) FGR; (b) 4PCS; (c) SAC-IA; (d) SC2-PCR; (e) our coarse registration algorithm; (f) our registration algorithm.
Figure 30.
Error and runtime of several point cloud registration algorithms.
Figure 30.
Error and runtime of several point cloud registration algorithms.
Figure 31.
Error distribution of several point cloud registration algorithms: (a) FGR; (b) 4PCS; (c) SAC-IA; (d) SC2-PCR; (e) our coarse registration algorithm; (f) our registration algorithm.
Figure 31.
Error distribution of several point cloud registration algorithms: (a) FGR; (b) 4PCS; (c) SAC-IA; (d) SC2-PCR; (e) our coarse registration algorithm; (f) our registration algorithm.
Figure 32.
The point cloud comparison diagram of the house indoor field before and after optimization: (a) top view; (b) isometric view.
Figure 32.
The point cloud comparison diagram of the house indoor field before and after optimization: (a) top view; (b) isometric view.
Table 1.
Precision comparison of two registration algorithms based on SC2 and FPFH and SC2 and Color-SHOT.
Table 1.
Precision comparison of two registration algorithms based on SC2 and FPFH and SC2 and Color-SHOT.
| Algorithm | RMSE | RE (deg) | TE (mm) |
|---|
| Based on SC2 and FPFH | 0.8445 | 0.8762 | 7.231 |
| Based on SC2 and Color-SHOT | 0.09686 | 0.1454 | 2.158 |
Table 2.
Pose adjustment weights.
Table 2.
Pose adjustment weights.
| Vertex | A | B | C | D | E | F | G | H |
|---|
| Weight | 0 | 1/8 | 2/8 | 3/8 | 4/8 | 5/8 | 6/8 | 7/8 |
Table 3.
Comparison of error and runtime of several registration algorithms.
Table 3.
Comparison of error and runtime of several registration algorithms.
| Algorithm | RMSE | RE (deg) | TE (mm) | Time (s) |
|---|
| FGR | 0.09924 | 0.1769 | 1.955 | 13.83 |
| 4PCS | 0.8437 | 0.9295 | 12.05 | 1.31 |
| SAC-IA | 0.8438 | 0.9317 | 8.978 | 3.74 |
| SC2-PCR | 0.8445 | 0.8762 | 7.231 | 2.28 |
| Our coarse registration algorithm | 0.09686 | 0.1454 | 2.158 | 3.16 |
| Our registration algorithm | 0.08643 | 0.08847 | 0.5675 | 8.57 |
Table 4.
Size before and after optimization.
Table 4.
Size before and after optimization.
| Parameters | Realistic Data | Before Optimization | After Optimization |
|---|
| Room length (mm) | 2765.00 | 2767.48 | 2765.86 |
| Room width (mm) | 1790.00 | 1792.42 | 1790.72 |
| Room height (mm) | 2845.00 | 2845.98 | 2845.60 |
| Gate width (mm) | 820.00 | 820.83 | 820.94 |
| Gate height (mm) | 2450.00 | 2449.28 | 2449.81 |
| Window width (mm) | 975.00 | 974.95 | 975.21 |
| Window height (mm) | 1480.00 | 1479.30 | 1479.20 |
Table 5.
Markers size before and after optimization.
Table 5.
Markers size before and after optimization.
| Parameters | Realistic Data | Before Optimization | After Optimization |
|---|
| Wall 1 marker length and width (mm2) | 150.00 × 150.00 | 149.37 × 149.78 | 150.78 × 150.18 |
| Wall 2 marker length and width (mm2) | 150.00 × 150.00 | 150.34 × 150.02 | 150.84 × 150.92 |
| Wall 3 marker length and width (mm2) | 150.00 × 150.00 | 149.65 × 150.73 | 149.36 × 149.64 |
| Wall 4 marker length and width (mm2) | 150.00 × 150.00 | 148.89 × 148.67 | 149.54 × 149.33 |
Table 6.
Wall angles before and after optimization.
Table 6.
Wall angles before and after optimization.
| Parameters | Realistic Data | Pre-Optimization Mean | Optimized Mean |
|---|
| Angle between wall 1 and wall 2 (deg) | 90.00 | 88.59 | 89.25 |
| Angle between wall 1 and wall 2 (deg) | 90.00 | 89.72 | 89.89 |
| Angle between wall 1 and wall 2 (deg) | 90.00 | 89.46 | 89.57 |
| Angle between wall 1 and wall 2 (deg) | 90.00 | 88.34 | 89.03 |

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}