
An Effective and Robust Parameter Estimation Method in a Self-Developed, Ultra-Low Frequency Impedance Spectroscopy Technique for Large Impedances

 , , , , , and
, , , , , and
Abstract
:1. Introduction
2. Related Works
3. Materials and Methods
3.1. BIS Measurement Method
- two sampling frequencies are used: in the range 10 kHz–100 kHz, fs = 375 kSample/s, while in the frequency range 1 mHz–10 kHz, the signals are sampled at fs = 37.5 kSample/s. If fs = 375 kSample/s is used, the data management of the real-time calculations is achieved by ping-pong buffering,
- in each decade, the number of excitation frequencies can be selected between three and 100 (the frequency values are selected at equal distances from the logarithmic scale),
- different integration times are used for each frequency, hence the duration of the measurements is different for each frequency decade,
- an excitation signal of the sinusoidal waveform in the frequency range from 1 mHz to 100 kHz with a Total Harmonic Distortion plus Noise (THDN+N) suppression greater than 100 dB,
- the excitation is generated by a voltage generator with a maximum noise of 1.5 = µVrms in the frequency range from 1 mHz to 100 kHz,
- the maximum excitation voltage is 10 V peak-to-peak, which can be reduced by up to 110 dB (i.e., up to about 32 µV peak-to-peak),
- the precision (variance) of the measured data is better than 1 ppm for amplitude and better than 0.01° for phase (demonstrated in [29]).
3.2. BIS Phantoms

| Abbreviation | Equation | Description | Unit | Usage |
|---|---|---|---|---|
| U1 | U1 = a1 + b1i | See Figure 2, complex format | V | |
| U2 | U2 = a2 + b2i | See Figure 2, complex format | V | |
| U3 | U3 = a3 + b3i | See Figure 2, complex format | V | |
| U4 | U4 = a4 + b4i | See Figure 2, complex format | V | |
| U1p4ph | U1/U4 phase | Rad | TR | |
| U2p4ph | U2/U4 phase | Rad | TR | |
| U3p4ph | U3/U4 phase | Rad | TR | |
| U32p4ph | (U2 − U3)/U4 phase | Rad | TR | |
| Log10(U1p4mag) | Logarithm transform of U1/U4 magnitude | TR | ||
| Log10(U2p4mag) | Logarithm transform of U2/U4 magnitude | TR | ||
| Log10(U3p4mag) | Logarithm transform of U3/U4 magnitude | TR | ||
| Log10(U32p4mag) | Logarithm transform of (U2 − U3)/U4 magnitude | TR |
3.3. Simulation Model
- first, to verify the accuracy of the measurements and the selected R and C values,
- second, to generate a large training database necessary for training the estimation system.
- input and output impedances:
- body model impedance:
- shunt resistance:
- supply voltage:
- frequency series:
3.4. Training Database
3.5. Neural Network
3.6. Hilbert Transformation Filter
4. Results
4.1. Verification of the Electronics Setup
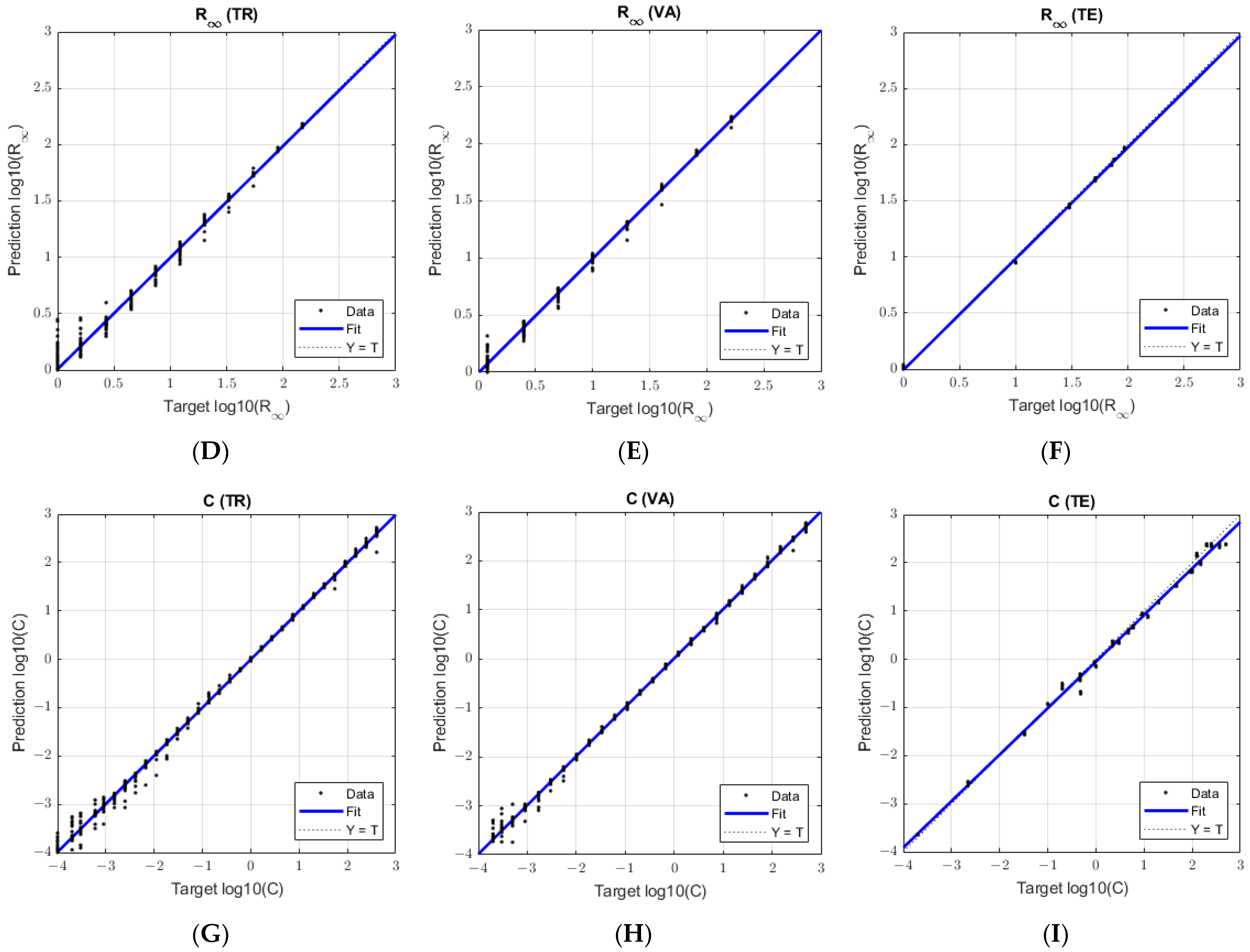
4.2. Estimation Results with Neural Networks
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Naranjo-Hernández, D.; Reina-Tosina, J.; Min, M. Fundamentals, recent advances, and future challenges in bioimpedance devices for healthcare applications. J. Sens. 2019, 2019, 9210258. [Google Scholar] [CrossRef]
- Showkat, I.; Khanday, F.A.; Beigh, M.R. A review of bio-impedance devices. Med. Biol. Eng. Comput. 2023, 61, 927–950. [Google Scholar] [CrossRef] [PubMed]
- Kusche, R.; Oltmann, A.; Rostalski, P. A Wearable Dual-Channel Bioimpedance Spectrometer for Real-Time Muscle Contraction Detection. IEEE Sens. J. 2024, 24, 11316–11327. [Google Scholar] [CrossRef]
- Zachariah, V.K.; Priyamvada, P.S. Bioimpedance Analysis: Basic Concepts. J. Ren. Nutr. Metab. 2023, 8, 30–34. [Google Scholar] [CrossRef]
- Aldobali, M.; Pal, K. Bioelectrical Impedance Analysis for Evaluation of Body Composition: A Review. In Proceedings of the 2021 International Congress of Advanced Technology and Engineering (ICOTEN), Taiz, Yemen, 4–5 July 2021; pp. 1–10. [Google Scholar]
- Khalil, S.F.; Mohktar, M.S.; Ibrahim, F. The Theory and Fundamentals of Bioimpedance Analysis in Clinical Status Monitoring and Diagnosis of Diseases. Sensors 2014, 14, 10895–10928. [Google Scholar] [CrossRef]
- Mialich, M.S.; Sicchieri, J.F.; Junior, A.J. Analysis of Body Composition: A Critical Review of the Use of Bioelectrical Impedance Analysis. Int. J. Clin. Nutr. 2014, 2, 1–10. [Google Scholar]
- Matthie, J.R. Bioimpedance measurements of human body composition: Critical analysis and outlook. Expert Rev. Med. Devices 2008, 5, 239–261. [Google Scholar] [CrossRef]
- Blue, M.N.M.; Tinsley, G.M.; Hirsch, K.R.; Ryan, E.D.; Ng, B.K.; Smith-Ryan, A.E. Validity of total body water measured by multi-frequency bioelectrical impedance devices in a multi-ethnic sample. Clin. Nutr. ESPEN 2023, 54, 187–193. [Google Scholar] [CrossRef]
- El Dimassi, S.; Gautier, J.; Zalc, V.; Boudaoud, S.; Istrate, D. Mathematical Issues in Body Water Volume Estimation Using Bio Impedance Analysis in e-Health; Colloque en TéléSANté et dispositifs biomédicaux, Université Paris 8; CNRS: Paris Saint Denis, France, 2023. [Google Scholar]
- Lai, Y.-K.; Ho, C.-Y.; Lai, C.-L.; Taun, C.-Y.; Hsieh, K.-C. Assessment of Standing Multi-Frequency Bioimpedance Analyzer to Measure Body Composition of the Whole Body and Limbs in Elite MaleWrestlers. Int. J. Environ. Res. Public Health 2022, 19, 15807. [Google Scholar] [CrossRef]
- Antipenko, V.V.; Pecherskaya, E.A.; Zinchenko, T.O.; Artamonov, D.V.; Spitsina, K.Y.; Pecherskiy, A.V. Development of an automated bioimpendance analyzer for monitoring the clinical condition and diagnosis of human body diseases. J. Phys. Conf. Ser. 2020, 1515, 052075. [Google Scholar] [CrossRef]
- Doonyapisut, D.; Kannan, P.; Kim, B.; Kim, J.K.; Lee, E.; Chung, C. Analysis of Electrochemical Impedance Data: Use of Deep Neural Networks. Adv. Intell. Syst. 2023, 5, 2300085. [Google Scholar] [CrossRef]
- Guo, M.-F.; Yang, N.-C.; Chen, W.-F. Deep-Learning-Based Fault Classification Using Hilbert–Huang Transform and Convolutional Neural Network in Power Distribution Systems. IEEE Sens. J. 2019, 19, 6905–6913. [Google Scholar] [CrossRef]
- Vizvari, Z.; Gyorfi, N.; Odry, A.; Sari, Z.; Klincsik, M.; Gergics, M.; Kovacs, L.; Kovacs, A.; Pal, J.; Karadi, Z.; et al. Physical Validation of a Residual Impedance Rejection Method during Ultra-Low Frequency Bio-Impedance Spectral Measurements. Sensors 2020, 20, 4686. [Google Scholar] [CrossRef] [PubMed]
- Cole, K.S.; Cole, R.H. Dispersion and absorption in dielectrics, I. Alternating current characteristics. J. Chem. Phys. 1941, 9, 341–351. [Google Scholar] [CrossRef]
- Schoutteten, M.K.; Lindeboom, L.; De Cannière, H.; Pieters, Z.; Bruckers, L.; Brys, A.D.H.; van der Heijden, P.; De Moor, B.; Peeters, J.; Van Hoof, C.; et al. The Feasibility of Semi-Continuous and Multi-Frequency Thoracic Bioimpedance Measurements by a Wearable Device during Fluid Changes in Hemodialysis Patients. Sensors 2024, 24, 1890. [Google Scholar] [CrossRef]
- Campa, F.; Gobbo, L.A.; Stagi, S.; Cyrino, L.T.; Toselli, S.; Marini, E.; Coratella, G. Bioelectrical impedance analysis versus reference methods in the assessment of body composition in athletes. Eur. J. Appl. Physiol. 2022, 122, 561–589. [Google Scholar] [CrossRef] [PubMed]
- Metshein, M.; Tuulik, V.-R.; Tuulik, V.; Kumm, M.; Min, M.; Annus, P. Electrical Bioimpedance Analysis for Evaluating the Effect of Pelotherapy on the Human Skin: Methodology and Experiments. Sensors 2023, 23, 4251. [Google Scholar] [CrossRef]
- Duong Trong, L.; Nguyen Quang, L.; Hoang Anh, D.; Dang Tuan, D.; Nguyen Chi, H.; Nguyen Minh, D. A Portable Band-shaped Bioimpedance System to Monitor the Body Fat and Fasting Glucose Level. J. Electr. Bioimpedance 2022, 13, 54–65. [Google Scholar] [CrossRef]
- Nescolarde, L.; Talluri, A.; Yanguas, J.; Lukaski, H. Phase angle in localized bioimpedance measurements to assess and monitor muscle injury. Rev. Endocr. Metab Disord. 2023, 24, 415–428. [Google Scholar] [CrossRef] [PubMed]
- Wohlgemuth, K.J.; Freeborn, T.J.; Southall, K.E.; Hare, M.M.; Mota, J.A. Can segmental bioelectrical impedance be used as a measure of muscle quality? Med. Eng. Phys. 2024, 124, 104103. [Google Scholar] [CrossRef] [PubMed]
- Pislaru-Danescu, L.; Zarnescu, G.-C.; Telipan, G.; Stoica, V. Design and Manufacturing of Equipment for Investigation of Low Frequency Bioimpedance. Micromachines 2022, 13, 1858. [Google Scholar] [CrossRef]
- Scaliusi, S.F.; Gimenez, L.; Pérez, P.; Martín, D.; Olmo, A.; Huertas, G.; Medrano, F.J.; Yúfera, A. From Bioimpedance to Volume Estimation: A Model for Edema Calculus in Human Legs. Electronics 2023, 12, 1383. [Google Scholar] [CrossRef]
- Scagliusi, S.F.; Delano, M. Characterization and Correction of Low Frequency Artifacts in Segmental Bioimpedance Measurements. In Proceedings of the 2023 45th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Sydney, Australia, 24–27 July 2023. [Google Scholar]
- El Khaled, D.; Novas, N.; Gazquez, J.-A.; Manzano-Agugliaro, F. Dielectric and Bioimpedance Research Studies: A Scientometric Approach Using the Scopus Database. Publications 2018, 6, 6. [Google Scholar] [CrossRef]
- Fu, B.; Freeborn, T.J. Residual impedance effect on emulated bioimpedance measurements using Keysight E4990A precision impedance analyzer. Measurement 2019, 134, 468–479. [Google Scholar] [CrossRef]
- Vizvari, Z.; Kiss, T.; Mathe, K.; Odry, P.; Ver, C.; Divos, F. Multi-frequency electrical impedance measurement on a wooden disc sample. Acta Silv. Lign. Hung. 2015, 11, 153–161. [Google Scholar] [CrossRef]
- Vizvari, Z.; Gyorfi, N.; Maczko, G.; Varga, R.; Jakabf-Csepregi, R.; Sari, Z.; Furedi, A.; Bajtai, E.; Vajda, F.; Tadic, V.; et al. Reproducibility analysis of bioimpedance-based self-developed live cell assays. Sci. Rep. 2024, 14, 16380. [Google Scholar] [CrossRef] [PubMed]
- Gyorfi, N.; Odry, A.; Karadi, Z.; Odry, P.; Szakall, T.; Kuljic, B.; Toth, A.; Vizvari, Z. Development of Bioimpedance-based Measuring Systems for Diagnosis of Non-alcoholic Fatty Liver Disease. In Proceedings of the 2021 IEEE 15th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 19–21 May 2021; pp. 135–140. [Google Scholar]
- Gyorfi, N.; Gal, A.R.; Fincsur, A.; Kalmar-Nagy, K.; Mintal, K.; Hormay, E.; Miseta, A.; Tornoczky, T.; Nemeth, A.K.; Bogner, P.; et al. Novel Noninvasive Paraclinical Study Method for Investigation of Liver Diseases. Biomedicines 2023, 11, 2449. [Google Scholar] [CrossRef]
- Sari, Z.; Klincsik, M.; Odry, P.; Tadic, V.; Toth, A.; Vizvari, Z. Lumped Element Method Based Conductivity Reconstruction Algorithm for Localization Using Symmetric Discrete Operators on Coarse Meshes. Symmetry 2023, 15, 1008. [Google Scholar] [CrossRef]
- Meade, M.L. Lock-in Amplifiers: Principles and Applications. 1983. Available online: https://archive.org/details/Lock-inAmplifiersPrinciplesAndApplications/page/n1/mode/2up (accessed on 19 August 2020).
- Hodson, T.O. Root-mean-square error (RMSE) or mean absolute error (MAE): When to use them or not. Geosci. Model Dev. 2022, 15, 5481–5487. [Google Scholar] [CrossRef]
- Ahmed, Z.; Kumar, S. Pearson’s correlation coefficient in the theory of networks: A comment. arXiv 2018, arXiv:1803.06937. [Google Scholar]
- Qi, X.; Wei, Y.; Mei, X.; Chellali, R.; Yang, S. Comparative Analysis of the Linear Regions in ReLU and LeakyReLU Networks. In Neural Information Processing. ICONIP 2023; Luo, B., Cheng, L., Wu, Z.G., Li, H., Li, C., Eds.; Communications in Computer and Information Science; Springer: Singapore, 2023; Volume 1962. [Google Scholar] [CrossRef]
- Kingma, D.P.; Adam, B.J. A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Available online: https://www.mathworks.com/matlabcentral/fileexchange/25986-constrained-particle-swarm-optimization (accessed on 15 May 2024).
- Available online: https://www.mathworks.com/help/signal/ug/hilbert-transform.html (accessed on 10 April 2024).
- Zheng, L.; Liu, Z.; Wang, G.; Zhang, Z. Research on Application of Hilbert Transform in Radar Signal Simulation; Atlantis Press: Amsterdam, The Netherlands, 2016. [Google Scholar] [CrossRef]
- Smith, J.O. Analytic Signals and Hilbert Transform Filters. In Mathematics of the Discrete Fourier Transform (DFT) with Audio Applications, 2nd ed.; W3K Publising: Dordrecht, The Netherlands, 2007; Available online: https://ccrma.stanford.edu/~jos/st/Analytic_Signals_Hilbert_Transform.html (accessed on 20 July 2024).
- Wang, S.; Xue, L.; Lai, J.; Li, Z. An improved phase retrieval method based on Hilbert transform in interferometric microscopy. Optik. Int. J. Light Electron Opt. 2013, 124, 1897–1901. [Google Scholar] [CrossRef]
- Popović, M.V. Digitalna Obrada Signala; Nauka: Beograd, Serbia; Drugo Izdanje: Beograd, Serbia, 1997; ISBN 86-7621-080-1. [Google Scholar]
- Matsuki, A.; Kori, H.; Kobayashi, R. An extended Hilbert transform method for reconstructing the phase from an oscillatory signal. Sci. Rep. 2023, 13, 3535. [Google Scholar] [CrossRef] [PubMed]
- Stojanović, I.S. Osnovi Telekomunikacija; Naučna Knjiga: Beograd, Serbia; Šesto Izdanje: Beograd, Serbia, 1997; ISBN 8623420071, 9788623420078. [Google Scholar]
- Simon, M.; Tomlinson, G.R. Use of the Hilbert transform in modal analysis of linear and non-linear structures. J. Sound Vib. 1984, 96, 421–436. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Willsky, A.S.; Nawab, S.H. Signals and Systems, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 1996; p. 07458. ISBN 0-13-814757-4. [Google Scholar]
- Poularikas, A.D. The Handbook of Formulas and Tables for Signal Processing; CRC Press LLC: Boca Raton, FL, USA, 1999; ISBN 0-8493-8579-2. [Google Scholar]
- Arcos, E.A.; Castillo, R.E. The Hilbert Transform. Surv. Math. Its Appl. 2021, 16, 149–192. [Google Scholar]
- Rosenblum, M.; Pikovsky, A.; Kühn, A.A.; Busch, J.L. Real-time estimation of phase and amplitude with application to neural data. Sci. Rep. 2021, 11, 18037. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





| Phantom Number | Rin [kΩ] | Cin [uF] | R∞ [kΩ] | R0-R∞ [kΩ] | R0 [kΩ] | C [uF] | Rout [kΩ] | Cout [uF] |
|---|---|---|---|---|---|---|---|---|
| 01 | 100 | 1 | 1 | 1 | 2 | 0.47 | 100 | 1 |
| 02 | 10 | 10 | 1 | 3.7 | 4.7 | 2.2 | 10 | 10 |
| 03 | 30 | 1 | 1 | 10 | 11 | 9.1 | 30 | 1 |
| 04 | 50 | 0.1 | 1 | 18 | 19 | 56 | 50 | 0.1 |
| 05 | 75 | 1 | 1 | 27 | 28 | 370 | 75 | 1 |
| 06 | 100 | 1 | 1 | 1 | 2 | 370 | 10 | 10 |
| 07 | 200 | 0.1 | 1 | 2.7 | 3.7 | 0.2 | 75 | 10 |
| 08 | 5 | 30 | 1 | 4.1 | 5.1 | 1 | 50 | 1 |
| 09 | 10 | 0.2 | 1 | 6 | 7 | 500 | 30 | 5 |
| 10 | 30 | 20 | 1 | 9 | 10 | 250 | 20 | 2 |
| 11 | 50 | 0.5 | 1 | 13 | 14 | 3 | 10 | 3 |
| 12 | 75 | 10 | 1 | 20 | 21 | 6 | 5 | 3 |
| 13 | 100 | 1 | 1 | 30 | 31 | 150 | 200 | 2 |
| 14 | 200 | 5 | 1 | 45 | 46 | 90 | 10 | 5 |
| 15 | 5 | 2 | 1 | 67 | 68 | 12 | 30 | 1 |
| 16 | 10 | 3 | 1 | 99 | 100 | 20 | 20 | 10 |
| 17 | 30 | 3 | 1 | 81 | 82 | 0.1 | 50 | 0.5 |
| 18 | 50 | 2 | 1 | 55 | 56 | 47 | 75 | 20 |
| 19 | 75 | 5 | 1 | 25 | 26 | 4.7 | 100 | 0.2 |
| 20 | 100 | 1 | 1 | 11 | 12 | 100 | 20 | 30 |
| 21 | 200 | 10 | 1 | 5 | 6 | 75 | 30 | 0.1 |
| 31 | 100 | 100 | 102 | 210 | 312 | 0.0002 | 100 | 100 |
| 32 | 100 | 100 | 93 | 402.1 | 495.1 | 0.0022 | 100 | 100 |
| 33 | 100 | 100 | 75 | 604 | 679 | 0.033 | 100 | 100 |
| 34 | 100 | 100 | 51.1 | 806 | 857.1 | 0.47 | 100 | 100 |
| 35 | 100 | 100 | 30.1 | 999.9 | 1030 | 0.94 | 100 | 100 |
| 36 | 100 | 100 | 10 | 1000 | 1010 | 0.0002 | 100 | 100 |
| 37 | 100 | 100 | 30.1 | 805.9 | 836 | 0.0022 | 100 | 100 |
| 38 | 100 | 100 | 51.1 | 604 | 655.1 | 0.033 | 100 | 100 |
| 39 | 100 | 100 | 71.5 | 400.5 | 472.0 | 0.48 | 100 | 100 |
| Element | Set | Size | Value set | Unit | m-Equation |
|---|---|---|---|---|---|
| Rin, Rout | TR | 9 | 5, 10, 20, 30, 50, 100, 200, 300, 500 | kΩ | |
| VA | 7 | 7, 15, 25, 40, 75, 150, 250 | kΩ | ||
| Cin, Cout | TR | 7 | 0.1, 0.3, 1, 3, 10, 30, 100 | µF | |
| VA | 4 | 0.2, 2, 20, 200 | µF | ||
| R0 | TR | 36 | 1.2, 1.5, 1.8, 2.2, 2.7, 3.3, 4.1, 5.0, 6.0, 7.4, 9.0, 11.0, 13.5, 16.4, 20.1, 24.5, 30.0, 36.6, 44.7, 54.6, 66.7, 81.5, 99.5, 121.5, 148.4, 181.3, 221.4, 270.4, 330.3, 403.4, 492.7, 601.8, 735.1, 897.8 1096.6, 1339.4 | kΩ | Roundn (exp(0.2:0.2:7.2),−1) × 103 |
| VA | 22 | 1.2, 1.6, 2.3, 3.2, 4.4, 6.2, 8.6, 12.0, 16.7 23.3, 32.6, 45.5, 63.4, 88.5 123.6, 172.4, 240.6, 335.9, 468.7, 654.1, 912.9 1274.1 | kΩ | Roundn (exp(0.15:1/3:7.25),−1) × 103 | |
| C | TR | 31 | 0.0001, 0.0002, 0.0003, 0.0006, 0.0009 0.0015, 0.0025, 0.0041, 0.0067, 0.0111, 0.0183, 0.0302, 0.0498, 0.0821 0.1353, 0.2231, 0.3679, 0.6065 1, 1.6487, 2.7183, 4.4817, 7.3891 12.182, 20.085, 33.115, 54.598, 90.017 148.41, 244.69, 403.43 | µF | Roundn (exp(−9:0.5:6),−4) × 1 × 10−6 |
| VA | 26 | 0.0002, 0.0003, 0.0005, 0.0009, 0.0017, 0.0030, 0.0055, 0.0101, 0.0183, 0.0334, 0.0608 0.1108, 0.2019, 0.3679, 0.6703 1.2214, 2.2255, 4.0552, 7.3891 13.464, 24.532, 44.701, 81.451 148.41, 270.43, 492.75 | µF | Roundn (exp(−8.8:0.6:6.2),−4) × 1 × 10−6 | |
| Rs | - | 1 | 96 | kΩ | |
| TR | 11 | 1, 1.6, 2.7, 4.5, 7.4 12.2, 20.1, 33.1, 54.6, 90, 148.4 | kΩ | Roundn (exp(0:0.5:5),−1) × 103 | |
| VA | 8 | 1.2, 2.5, 5 10, 20.1, 40.4, 81.5, 164 | kΩ | Roundn (exp(0.2:0.7:5.2),−1) × 103 |
| NN Parameter | Description | Value Range | Initial | Optimum |
|---|---|---|---|---|
| Hilb | Hilbert Rule Control in complex input signals | 0–0.3 | 0.05 | 0.1 |
| convSize (1) | Filter size in convolution layer 1 | 10–25 | 20 | 15 |
| convSize (2) | Filter size in convolution layer 2 | 7–18 | 14 | 11 |
| convSize (3) | Filter size in convolution layer 3 | 3–10 | 5 | 7 |
| numFilters (1) | Number of filters in convolution layer 1 | 10–40 | 25 | 24 |
| numFilters (2) | Number of filters in convolution layer 2 | 10–40 | 25 | 31 |
| numFilters (3) | Number of filters in convolution layer 3 | 10–40 | 25 | 35 |
| leakyRelu (1) | Scale of leaky rectified linear unit layer 1 | 0–0.2 | 0.1 | 0.13687 |
| leakyRelu (2) | Scale of leaky rectified linear unit layer 2 | 0–0.2 | 0.1 | 0.01749 |
| leakyRelu (3) | Scale of leaky rectified linear unit layer 3 | 0–0.2 | 0.1 | 0.18037 |
| fullySize (1) | Output size of fully connected layer 1 | 50–250 | 64 | 126 |
| fullySize (2) | Output size of fully connected layer 2 | 3 (fix) | 3 | 3 |
| initLR | Initial Learn Rate | 1 × 10−4:5 × 10−3 | 0.001 | 0.001 |
| MiniBatchSize | number of samples used in each iteration of the training algorithm | 50–400 | 128 | 103 |
| LRdropfactor | Learn Rate Drop Factor—factor by which the learning rate is reduced during training at specified drop periods | 0.3–0.9 | 0.6 | 0.35138 |
| LRdropperiod | Learn Rate Drop Period | 1 (fix) | 1 | 1 |
| MaxEpochs | maximum number of training epochs | 7 (fix) | 7 | 7 |
| TR | VA | TE | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| CNN Instance | Hilbert Filtering | R0 | R∞ | C | R0 | R∞ | C | R0 | R∞ | C |
| Initial CNN architecture (cnn_init_ch_U32p4) | No | 0.014 | 0.047 | 0.070 | 0.021 | 0.039 | 0.072 | 0.032 | 0.024 | 0.175 |
| Initial CNN architecture (cnn_init_ch_U32p4U32p4x) | Yes | 0.012 | 0.045 | 0.068 | 0.018 | 0.033 | 0.075 | 0.033 | 0.020 | 0.146 |
| Optimized CNN architecture (cnn_opt_ch_U32p4) | No | 0.012 | 0.046 | 0.073 | 0.019 | 0.037 | 0.072 | 0.033 | 0.020 | 0.155 |
| Optimized CNN architecture (cnn_opt_ch_U32p4U32p4x) | Yes | 0.010 | 0.042 | 0.069 | 0.014 | 0.038 | 0.065 | 0.030 | 0.017 | 0.143 |
| Record Name | R0 [kΩ] | Estimated R0 [kΩ] | R∞ [kΩ] | Estimated R∞ [kΩ] | C [uF] | Estimated C [uF] | |||
|---|---|---|---|---|---|---|---|---|---|
| Nominal | Cnn_Opt_Ch_U32p4 | Cnn_Opt_Ch_U32p4U32p4x | Nominal | Cnn_Opt_Ch_U32p4 | Cnn_Opt_Ch_U32p4U32p4x | Nominal | Cnn_Opt_Ch_U32p4 | Cnn_Opt_Ch_U32p4U32p4x | |
| Fantom01_Extra00 | 2.0000 | 1.9508 | 1.9624 | 1.0000 | 0.9647 | 0.9674 | 0.4700 | 0.4872 | 0.4324 |
| Fantom03_Extra1,10 | 11.0000 | 10.6626 | 10.8975 | 1.0000 | 0.9539 | 0.9789 | 9.1000 | 8.1631 | 8.8900 |
| Fantom06_Extra10,12 | 2.0000 | 1.8970 | 1.9578 | 1.0000 | 0.9860 | 0.9716 | 370.0001 | 223.3616 | 248.9201 |
| Fantom16_Extra14,10 | 100.0000 | 105.1268 | 107.6225 | 1.0000 | 0.9551 | 0.9880 | 20.0000 | 14.5450 | 17.4282 |
| Fantom19_Extra14,11 | 26.0000 | 27.6678 | 27.6018 | 1.0000 | 0.9807 | 0.9882 | 4.7000 | 3.6715 | 3.9807 |
| Fantom32 (2024-05-02_12-25-31) | 495.1000 | 519.5878 | 577.8306 | 93.0000 | 89.2673 | 94.4957 | 0.0022 | 0.0058 | 0.0047 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuljic, B.; Vizvari, Z.; Gyorfi, N.; Klincsik, M.; Sari, Z.; Kovacs, F.; Juhos, K.; Szakall, T.; Odry, A.; Kovacs, L.; et al. An Effective and Robust Parameter Estimation Method in a Self-Developed, Ultra-Low Frequency Impedance Spectroscopy Technique for Large Impedances. Electronics 2024, 13, 3300. https://doi.org/10.3390/electronics13163300
Kuljic B, Vizvari Z, Gyorfi N, Klincsik M, Sari Z, Kovacs F, Juhos K, Szakall T, Odry A, Kovacs L, et al. An Effective and Robust Parameter Estimation Method in a Self-Developed, Ultra-Low Frequency Impedance Spectroscopy Technique for Large Impedances. Electronics. 2024; 13(16):3300. https://doi.org/10.3390/electronics13163300
Chicago/Turabian StyleKuljic, Bojan, Zoltan Vizvari, Nina Gyorfi, Mihaly Klincsik, Zoltan Sari, Florian Kovacs, Katalin Juhos, Tibor Szakall, Akos Odry, Levente Kovacs, and et al. 2024. "An Effective and Robust Parameter Estimation Method in a Self-Developed, Ultra-Low Frequency Impedance Spectroscopy Technique for Large Impedances" Electronics 13, no. 16: 3300. https://doi.org/10.3390/electronics13163300