
A Novel Finite-Set Ultra-Local Model-Based Predictive Current Control for AC/DC Converters of Direct-Driven Wind Power Generation with Enhanced Steady-State Performance


Abstract
:1. Introduction
1.1. Research Background
1.2. Literature Review
1.3. Contribution and Outline
2. Descriptions of Mathematic Model and Traditional FS-ULMPCC Method
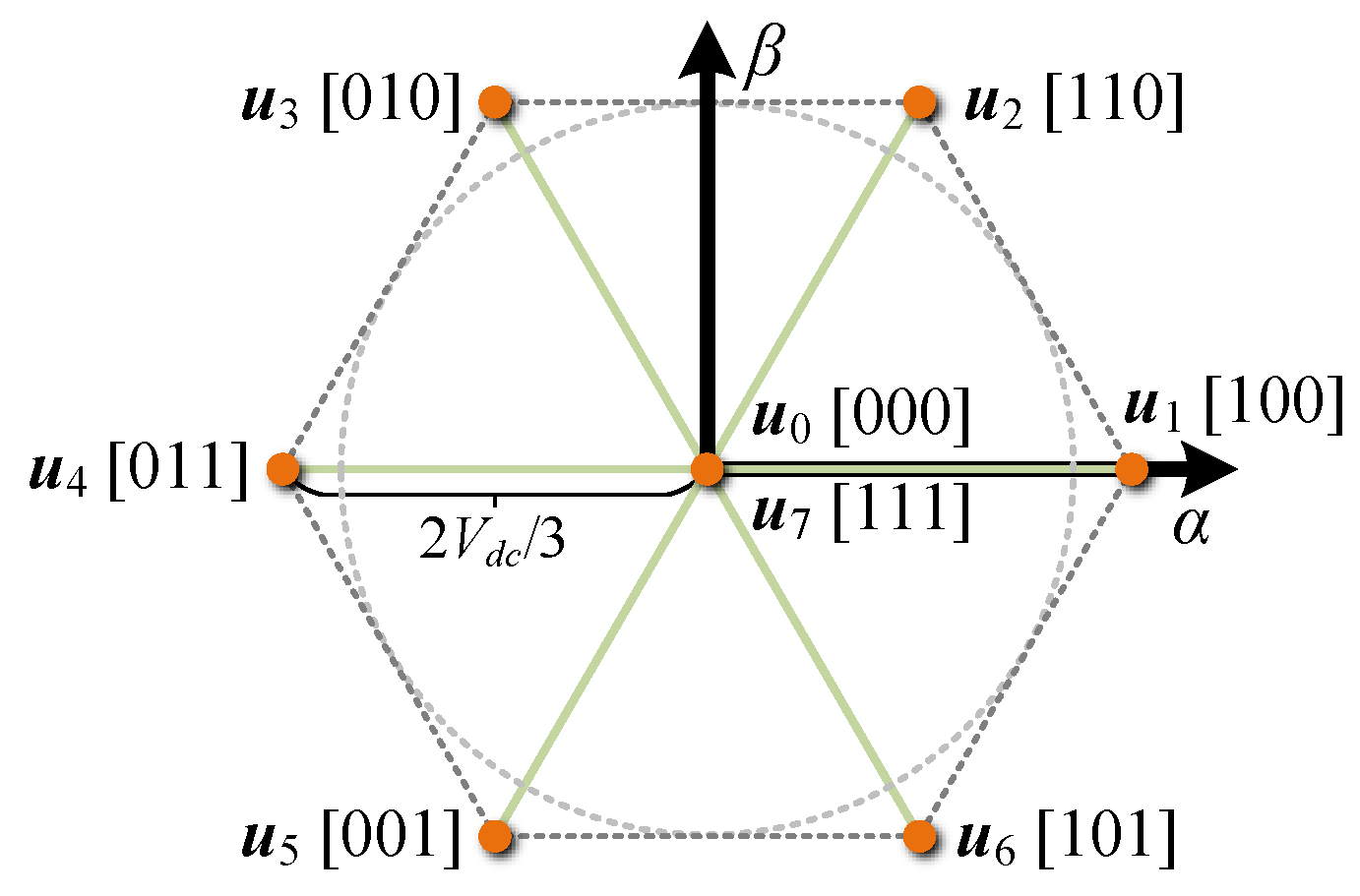
2.1. Mathematic Model
2.2. Principle and Implementation of Basic FS-ULMPCC Method
2.2.1. Prediction Model
2.2.2. Cost Function
2.2.3. Optimization Scheme
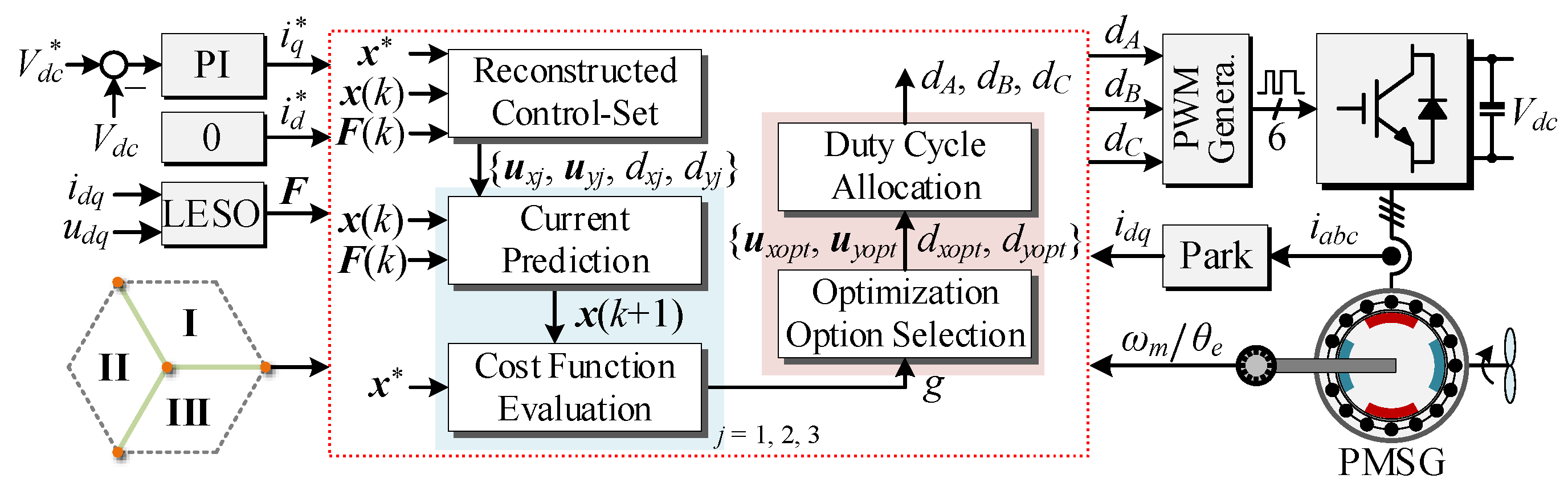
3. Proposed FS-ULMPCC Method
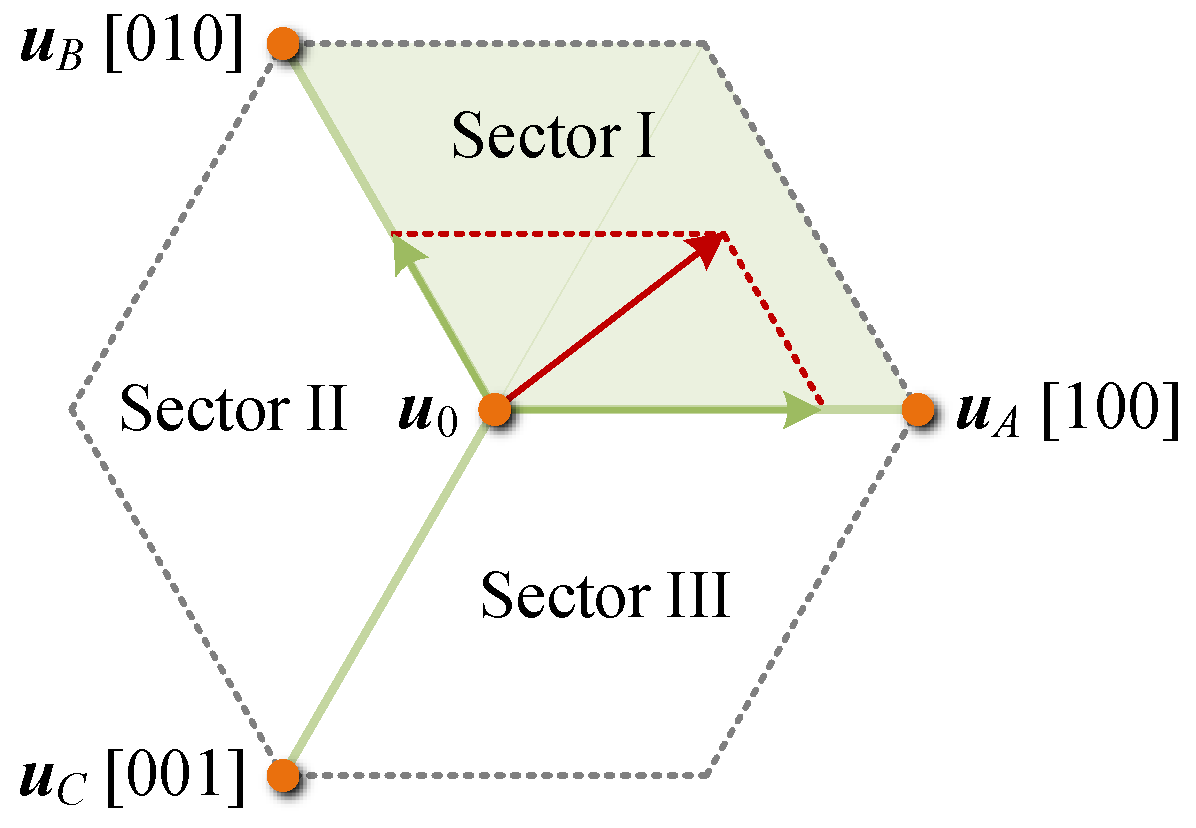
3.1. Reconstruction of Control Set
3.2. Current Prediction
3.3. Cost Function Evaluation and Optimal Option Selection
3.4. Duty Cycle Allocation
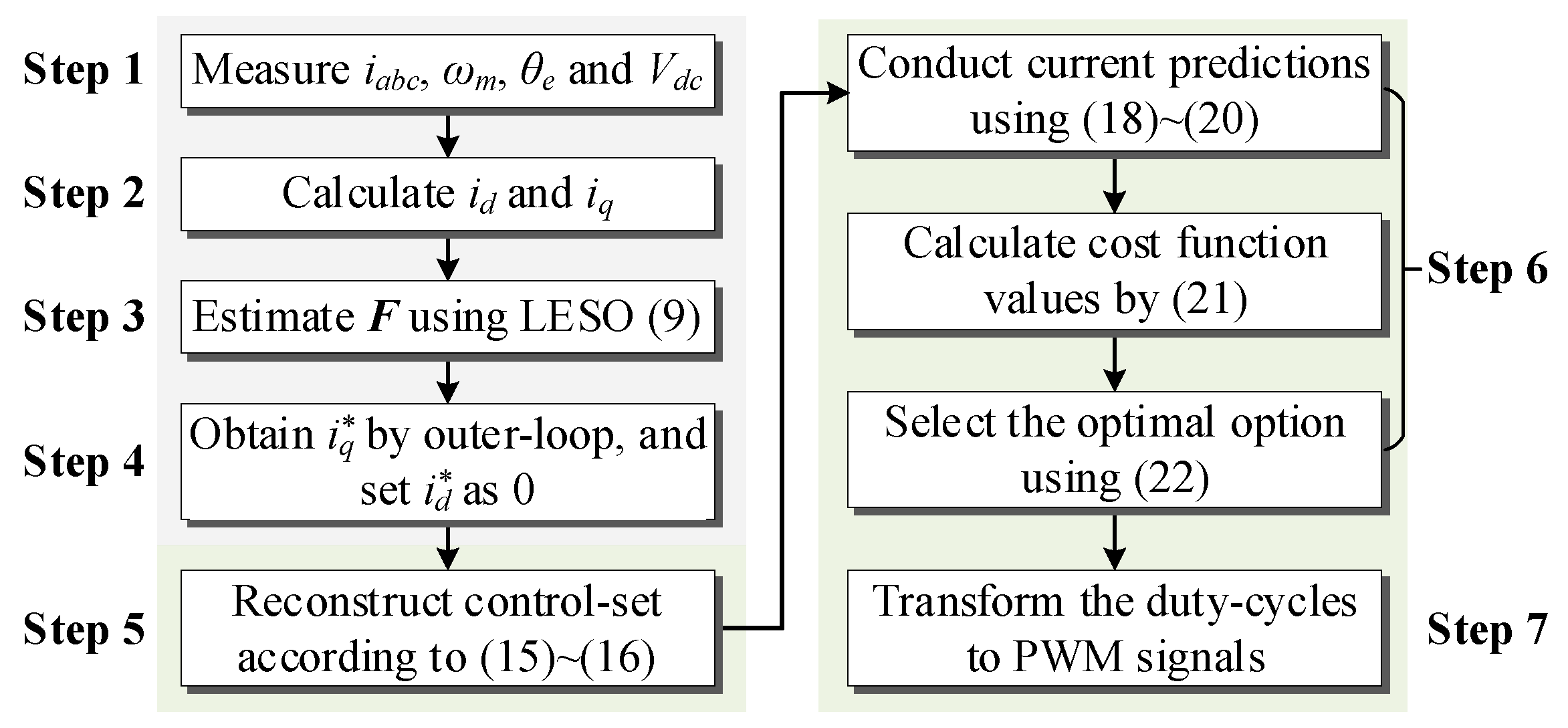
3.5. Summary of the Proposed FS-ULMPCC Method
- Step 1: Measure the information of the stator currents (ia, ib, and ic), machine speed (ωm), rotor electrical angle (θe), and DC-link voltage (Vdc).
- Step 2: Calculate the dq-axis currents (id and iq) using Park’s transformation.
- Step 3: Estimate the lumped disturbance (F) using the LESO seen in (9).
- Step 4: Obtain the q-axis current reference (iq*) using the outer voltage controller and set the d-axis current reference (id*) to 0.
- Step 5: Reconstruct the control set vprop according to (15) and (16).
- Step 6: Conduct the current predictions in (18)–(20), calculate the cost function values using (21), and select the optimal choice using (22).
- Step 7: Transform the duty cycles to PWM signals for the three-phase legs of the converter.
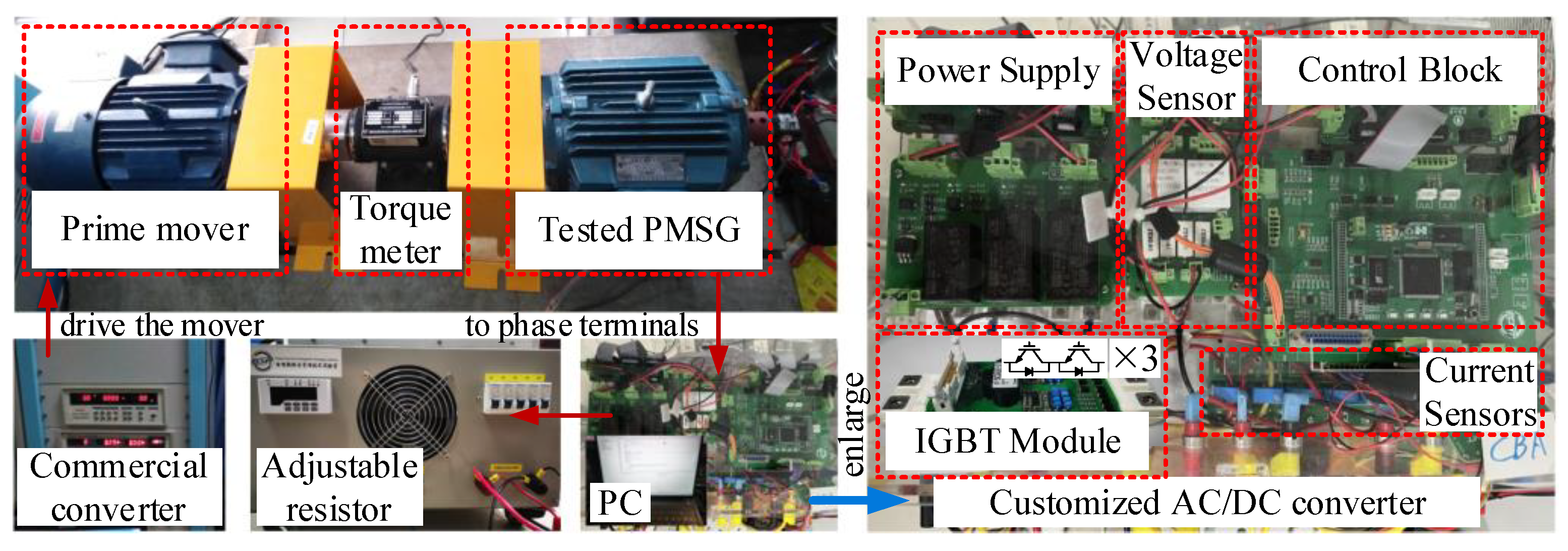
4. Experimental Verification
4.1. Experimental Test Rig
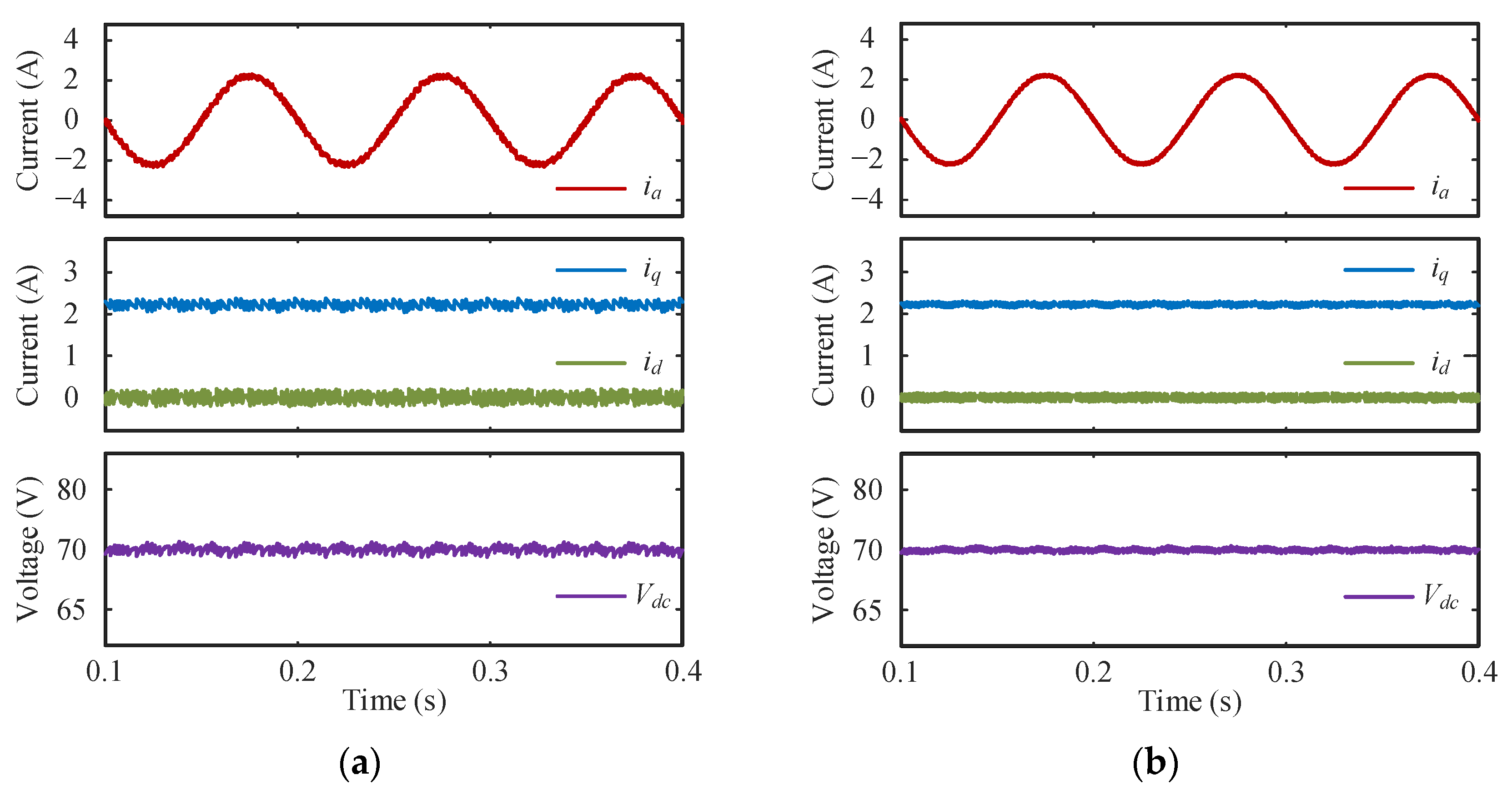
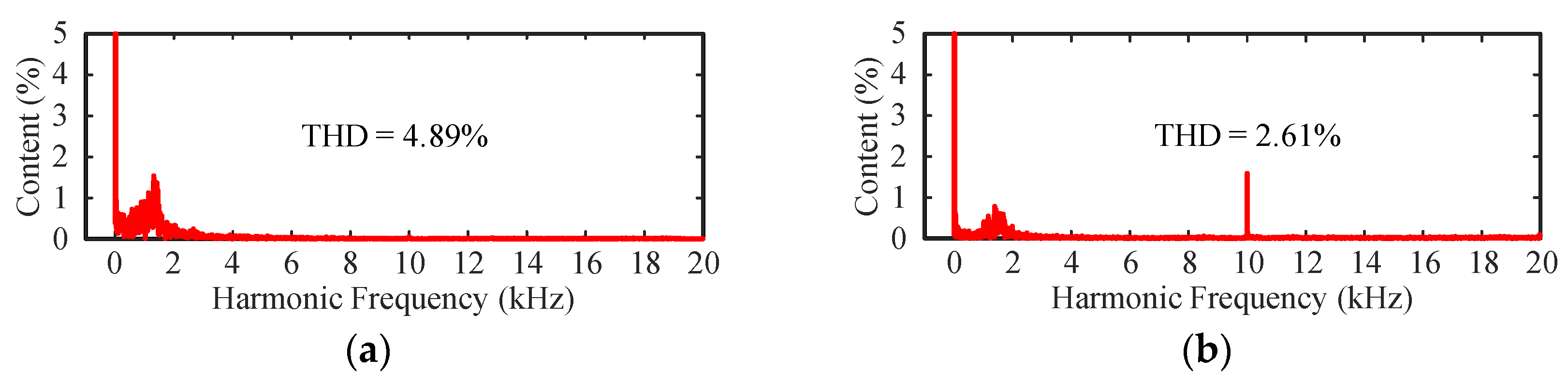
4.2. Steady-State Performance Comparison
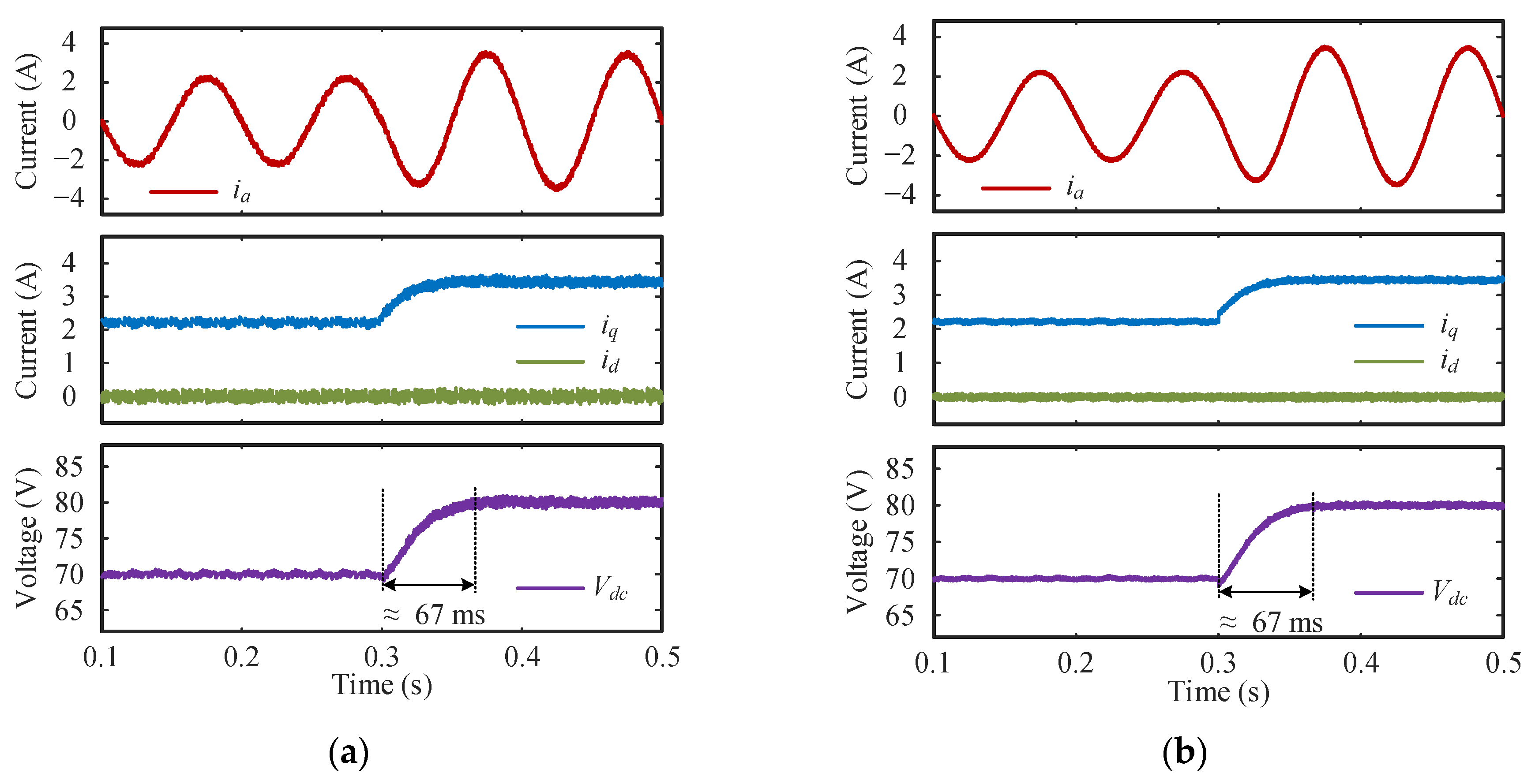
4.3. Transient Performance Comparison
4.4. Computational Burden Evaluation
5. Conclusions
- (1)
- In terms of steady-state performance, the proposed FS-ULMPCC method is evidently superior to the traditional one. Not only can the current THD value be reduced from 4.89% to 2.61% but also the inverter operation with a constant switching frequency can also be realized.
- (2)
- In terms of transient performance, the proposed FS-ULMPCC method is considerable to a traditional one in response to both load change and voltage reference alternation cases. The obtained voltage curves are very smooth without any overshoots, and the transients last less than 80 ms.
- (3)
- In terms of computational burden, the proposed FS-ULMPCC method is more efficient than the traditional one, thanks to the fact that only three options are embraced in the reconstructed control set. The reduction in execution time is approximately 4.66 μs.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, B.; Fesseha, S.B.; Chen, S.; Zhou, Y. Real-time solar power generation scheduling for maintenance and suboptimally performing equipment using demand response unified with model predictive control. Energies 2024, 17, 3212. [Google Scholar] [CrossRef]
- Boland, J. Constructing interval forecasts for solar and wind energy using quantile regression, ARCH and exponential smoothing methods. Energies 2024, 17, 3240. [Google Scholar] [CrossRef]
- Wang, Y.; Meng, J.H.; Zhang, X.Y.; Xu, L. Control of PMSG-based wind turbines for system inertial response and power oscillation damping. IEEE Trans. Sustain. Energy 2015, 6, 565–574. [Google Scholar] [CrossRef]
- Wu, M.Z.; Ding, L.; Xu, X.N.; Wang, K.; Lu, Q.W.; Li, Y.W. A common-mode voltage elimination scheme by reference voltage decomposition for back-to-back two-level converters. IEEE Trans. Ind. Electron. 2024, 71, 4463–4473. [Google Scholar] [CrossRef]
- Xu, X.N.; Wu, M.Z.; Wang, K.; Zheng, Z.D.; Deng, Z.F.; Li, Y.W.; Li, Y.D. A simple method for common-mode voltage reduction and neutral-point potential balance of back-to-back three-level NPC converters. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 2855–2869. [Google Scholar] [CrossRef]
- Rodriguez, J.; Garcia, C.; Mora, A.; Flores-Bahamonde, F.; Acuna, P.; Novak, M.; Zhang, Y.; Tarisciotti, L.; Davari, S.A.; Zhang, Z.; et al. Latest advances of model predictive control in electrical drives—Part I: Basic concepts and advanced strategies. IEEE Trans. Power Electron. 2022, 37, 3927–3942. [Google Scholar] [CrossRef]
- Rodriguez, J.; Valencia, D.F.; Elmorshedy, M.; Wang, F.; Zuo, K.; Tarisciotti, L.; Flores-Bahamonde, F.; Xu, W.; Zhang, Z.; Zhang, Y.; et al. Latest advances of model predictive control in electrical drives—Part II: Applications and benchmarking with classical control methods. IEEE Trans. Power Electron. 2022, 37, 5047–5061. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Xia, B.; Yang, H.T.; Rodriguez, J. Overview of model predictive control for induction motor drives. Chin. J. Electr. Eng. 2016, 2, 62–76. [Google Scholar]
- Zhang, X.G.; Zhang, L.; Zhang, Y.C. Model predictive current control for PMSM drives with parameter robustness improvement. IEEE Trans. Power Electron. 2019, 34, 1645–1657. [Google Scholar] [CrossRef]
- Chen, Z.; Qiu, J.; Jin, M. Adaptive finite-control-set model predictive current control for IPMSM drives with inductance variation. IET Electr. Power Appl. 2017, 11, 874–884. [Google Scholar] [CrossRef]
- Guo, L.; Xu, Z.; Li, Y. An inductance online identification-based model predictive control method for grid-connected inverters with an improved phase-locked loop. IEEE Trans. Transp. Electrif. 2022, 8, 2695–2709. [Google Scholar] [CrossRef]
- Lin, C.; Liu, T.; Yu, J. Model-free predictive current control for interior permanent-magnet synchronous motor drives based on current difference detection technique. IEEE Trans. Ind. Electron. 2014, 61, 667–681. [Google Scholar] [CrossRef]
- Liu, X.; Yang, H.; Lin, H.Y.; Yu, F.; Yang, Y. A novel finite-set sliding-mode model-free predictive current control for PMSM drives without dc-link voltage sensor. IEEE Trans. Power Electron. 2024, 39, 320–331. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Jin, J.; Huang, L. Model-free predictive current control of PMSM drives based on extended state observer using ultralocal model. IEEE Trans. Ind. Electron. 2021, 68, 993–1003. [Google Scholar] [CrossRef]
- Fliess, M.; Join, C. Model-free control. Int. J. Control 2013, 86, 2228–2252. [Google Scholar] [CrossRef]
- Sun, Z.; Deng, Y.; Wang, J. Finite control set model-free predictive current control of PMSM with two voltage vectors based on ultralocal model. IEEE Trans. Power Electron. 2023, 38, 776–788. [Google Scholar] [CrossRef]
- Mousavi, M.S.; Davari, S.A.; Nekoukar, V. Integral sliding mode observer-based ultralocal model for finite-set model predictive current control of induction motor. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2912–2922. [Google Scholar] [CrossRef]
- Yang, N.; Zhang, S.; Li, X. A new model-free deadbeat predictive current control for PMSM using parameter-free Luenberger disturbance observer. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 407–417. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C. Model predictive control for a six-phase PMSM motor with a reduced-dimension cost function. IEEE Trans. Ind. Electron. 2020, 67, 969–979. [Google Scholar] [CrossRef]
- Xia, L.; Xu, L.; Yang, Q.; Yu, F.; Zhang, S. An MPC scheme with enhanced active voltage vector region for V2G inverter. Energies 2020, 13, 1312. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Two-vector-based model predictive torque control without weighting factors for induction motor drives. IEEE Trans. Power Electron. 2016, 31, 1381–1390. [Google Scholar] [CrossRef]
- Sun, X.; Li, T.; Yao, M.; Lei, G.; Guo, Y.; Zhu, J. Improved finite-control-set model predictive control with virtual vectors for PMSHM drives. IEEE Trans. Energy Convers. 2022, 37, 1885–1894. [Google Scholar] [CrossRef]
- Gu, M.; Yang, Y.; Fan, M.D.; Xiao, Y.; Liu, P.; Zhang, X.N.; Yang, H.; Rodriguez, J. Finite control set model predictive torque control with reduced computation burden for PMSM based on discrete space vector modulation. IEEE Trans. Energy Convers. 2023, 38, 703–712. [Google Scholar] [CrossRef]
- Djellab, N.; Boureghda, A. A moving boundary model for oxygen diffusion in a sick cell. Comput. Methods Biomech. Biomed. 2021, 25, 1402–1408. [Google Scholar] [CrossRef] [PubMed]
- Boureghda, A.; Djellab, N. Du fort-frankel finite difference scheme for solving of oxygen diffusion problem inside one cell. J. Comput. Theor. Transp. 2023, 52, 363–373. [Google Scholar] [CrossRef]
- Boureghda, A. Solution to an ice melting cylindrical problem. J. Nonlinear Sci. Appl. 2016, 9, 1440–1452. [Google Scholar] [CrossRef]
- Karamanakos, P.; Geyer, T. Guidelines for the design of finite control set model predictive controllers. IEEE Trans. Power Electron. 2020, 35, 7434–7450. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sector | ux | uy |
|---|---|---|
| I | uA | uB |
| II | uB | uC |
| III | uC | uA |
| Symbol | Quantity | Value |
|---|---|---|
| PN | Rated power | 2.2 kW |
| nN | Rated speed | 800 rpm |
| np | Pole pairs | 2 |
| Rs | Stator resistance | 5.25 Ω |
| Ld | d-axis inductance | 24 mH |
| Lq | q-axis inductance | 36 mH |
| ψf | PM flux | 0.8 Wb |
| Symbol | Description | Value |
|---|---|---|
| Kp | Proportional coefficient of voltage regulator | 0.02 |
| Ki | Integral coefficient of voltage regulator | 5 |
| α | Coefficient matrix in prediction model (10) | [40 0; 0 30] |
| ω0 | Coefficient involved in LESO (9) | 2000 |
| Clock Cycles | Execution Time | |
|---|---|---|
| Traditional FS-ULMPCC method | 5384 | 35.89 μs |
| Proposed FS-ULMPCC method | 4685 | 31.23 μs |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Yin, Z.; Yu, F.; Long, Y.; Ni, S.; Gao, P. A Novel Finite-Set Ultra-Local Model-Based Predictive Current Control for AC/DC Converters of Direct-Driven Wind Power Generation with Enhanced Steady-State Performance. Electronics 2024, 13, 3302. https://doi.org/10.3390/electronics13163302
Wang Z, Yin Z, Yu F, Long Y, Ni S, Gao P. A Novel Finite-Set Ultra-Local Model-Based Predictive Current Control for AC/DC Converters of Direct-Driven Wind Power Generation with Enhanced Steady-State Performance. Electronics. 2024; 13(16):3302. https://doi.org/10.3390/electronics13163302
Chicago/Turabian StyleWang, Zhiguo, Zhilong Yin, Feng Yu, Yue Long, Shuo Ni, and Pan Gao. 2024. "A Novel Finite-Set Ultra-Local Model-Based Predictive Current Control for AC/DC Converters of Direct-Driven Wind Power Generation with Enhanced Steady-State Performance" Electronics 13, no. 16: 3302. https://doi.org/10.3390/electronics13163302