Abstract
This study addresses the limitations of wireless local area networks in indoor localization by utilizing Extra-Trees Regression (ETR) to estimate locations based on received signal strength indicator (RSSI) values from a radio environment map (REM). We investigate how integrating numerous access points can enhance indoor localization accuracy. By constructing an extensive REM using RSSI data from various access points collected by a mobile robot in the intended interior setting, we evaluate several machine learning regression techniques. Our research pays special attention to an optimized ETR model, validated through 10-fold cross-validation and hyperparameter tuning. We quantitatively evaluate the efficiency of our suggested multi-access-point approach using root mean square error (RMSE) for REM evaluation and location error metrics for accurate localization. The results show that incorporating multiple access points significantly improves indoor localization accuracy, providing a substantial improvement over single-access-point systems when assessing interior radio frequency environments.
1. Introduction
A radio environment map (REM) is a dynamic, digital atlas that provides a comprehensive view of radio frequency characteristics across various geographic areas, which is crucial for densely populated wireless environments. It records real-time data on signal strength, spectrum availability, interference patterns, and frequency band occupancy, aiding in efficient spectrum management and enhancing communication quality. Complementing this, indoor localization technology pinpoints the positions of devices or individuals within buildings by using network infrastructure such as Wi-Fi and Bluetooth beacons. This technology facilitates navigation in complex spaces like airports and malls, and enhances security and building management systems. Together, REMs and indoor localization significantly improve the efficiency and functionality of wireless communications systems, especially in confined spaces, enabling advanced applications across various sectors [1,2,3].
REMs and indoor localization are pivotal technologies in modern wireless communications systems that manage complex environments with precision [4]. REMs gather and integrate data from sources like base stations and mobile devices to dynamically map the radio frequency landscape. This process includes analyzing spectrum usage and detecting interference, with continuous updating to adapt to environmental changes. The comprehensive data aids network operators in optimizing network performance through adjustments in power levels, frequency allocations, and infrastructure planning [5,6].
Indoor localization complements REMs by pinpointing device locations within buildings by using Wi-Fi, Bluetooth, and ultra-wideband (UWB) signals [7,8,9]. It captures signal strength and timing from multiple sensors to compute exact positions using methods such as trilateration or triangulation [9]. The process can involve fingerprinting, where a pre-mapped database of signal characteristics helps identify device locations more accurately. Precise location data are integrated into various applications, enhancing navigation, asset tracking, and security for indoor settings [10].
In recent years, AI development has focused on computer-based machine learning methods and integrated circuits for specific functions. Hierarchical artificial neural networks (ANNs) have been applied in diverse domains such as face recognition, autonomous driving, and medical diagnostics. A significant advancement is the programmable diffractive deep neural network (D2NN) based on a digital-coding metasurface array. This system, known as a Programmable Artificial Intelligence Machine (PAIM), integrates programmable metasurfaces with artificial neurons, allowing for real-time reconfigurable neural networks. PAIM can handle tasks like image classification, mobile communication coding–decoding, and multi-beam focusing. Its reprogrammable nodes enable retraining for various applications, overcoming the fixed architecture limitations of traditional D2NNs and enhancing adaptability in complex environments. This advancement positions PAIM as a promising tool for AI applications requiring rapid and adaptive processing [11].
Additionally, recent advancements in ANNs have explored alternatives to traditional digital hardware, such as programmable surface plasmonic neural networks (SPNNs) using spoof surface plasmon polariton (SSPP) waveguides. These SPNNs offer low crosstalk, low radiation loss, and ease of integration, enabling real-time reconfigurable neural networks with dynamic weight adjustment through voltage-tuned varactors. Demonstrating high accuracy in tasks like vector classification and wireless communication encoding–decoding, SPNNs present a fast, reliable, and adaptive approach to machine learning, leveraging the advantages of plasmonic metamaterials [12].
REMs provide a macroscopic view of the radio environment while localization offers microscopic accuracy, greatly enhancing the reliability and efficiency of wireless networks for both expansive and confined spaces [13,14]. These technologies are foundational in supporting a wide range of applications, from mobile communication to sophisticated industrial systems, ensuring optimal operation and service delivery in increasingly complex wireless landscapes [15].
REMs and indoor localization are critical tools designed to enhance wireless communications through effective spectrum management and precise location tracking. REMs come in various forms: spectrum-based REMs analyze frequency usage across geographic regions to optimize spectrum allocation; interference REMs identify high interference areas to ensure reliable communications; coverage REMs detail base station coverage and signal strength, aiding in network design and optimization; and traffic REMs monitor communication flow to help manage network loads and plan expansions [7,16]. Meanwhile, indoor localization utilizes technologies like Wi-Fi, employing signal strength and timing methods to locate devices, and Bluetooth Low Energy (BLE) beacons that use triangulation for positioning in environments such as retail and healthcare. UWB offers centimeter-level accuracy by measuring the travel time of radio pulses, while magnetic field localization uses variations in Earth’s magnetic field supplemented by sensors in signal-poor areas [17,18,19]. Additionally, visual-based localization utilizes cameras to match images against a database for precise positioning, which is especially useful in visually rich settings. Together, these REMs and localization methods address the complex challenges of managing modern wireless networks and enhancing indoor navigation and asset tracking, ensuring robust and efficient communication across diverse environments [20,21].
REMs are a crucial tool in wireless communications networks, and are designed to enhance spectrum efficiency, reduce interference, and bolster overall network performance [22]. REMs play a vital role in spectrum management by identifying underutilized frequency bands and reallocating them as needed, which is essential in densely populated areas or where multiple devices and services vie for bandwidth. They provide a detailed view of the radio environment, aiding network operators in identifying and mitigating sources of interference through adjustments in transmitter power levels, frequency allocations, or by implementing advanced interference cancellation techniques. Additionally, REMs contribute to network planning and optimization, offering data for strategic decisions on base station placement, network infrastructure layout, and settings adjustments to maximize coverage and capacity. They also enhance service quality by ensuring networks are less prone to congestion and interference, supporting higher speeds and more reliable connections [20,23]. REMs ensure regulatory compliance by monitoring spectrum usage and preventing conflicts with other spectrum users, such as emergency services or military communications. In research and development, REMs provide a basis for new technologies and predictive models that improve network efficiency. During emergencies, they enable quick assessment of the communication environment, facilitating reliable channels for first responders and disaster management teams. For Internet of Things and smart-city applications, REMs manage complex device interactions, ensuring sufficient bandwidth, and minimizing signal interference, making them an integral part of modern wireless network management [24,25].
Indoor localization technologies are essential for precise location tracking within buildings or other enclosed spaces where a GPS is ineffective, offering a wide range of applications across various sectors. These technologies enable efficient navigation and wayfinding in complex indoor environments such as airports, malls, hospitals, and office buildings, providing directions and maps directly to smartphones. They are critical for asset tracking and management in industrial settings, warehouses, and healthcare facilities, allowing for real-time location monitoring of equipment, inventory, and personnel, which enhances operational efficiency and reduces theft [26]. Retail stores leverage indoor localization to enhance customer experiences by sending targeted promotions based on the customer’s precise location within the store. In emergencies, these technologies quickly locate individuals within a building, facilitating swift evacuations and effective coordination of rescue operations. Additionally, indoor localization supports workplace productivity by managing space usage and tracking employee attendance. It triggers personalized settings in smart home automation and improves healthcare delivery by monitoring patient locations and managing patient flow [27]. Entertainment venues use it for experiences and games that require location-based interactions, while advanced security systems utilize it for monitoring restricted areas to detect unauthorized movements. In logistics, indoor localization optimizes operations by providing the exact locations of goods, improving the efficiency of loading and unloading processes. Overall, indoor localization technologies enhance efficiency, safety, and user experience across a broad spectrum of applications [28,29].
Our primary goal is to propose an enhanced method for indoor radio environment map localization. This approach leverages received signal strength indicator values and machine learning (ML) algorithms, utilizing real data gathered from field strength measurements. The data for our study were collected using a TurtleBot3 Burger robot in a room at the University of Ulsan, Republic of Korea. We devised a methodology for constructing the REM, which was then used to generate a dataset for our ML-based indoor localization approach that uses multiple access points (APs). To achieve localization with the synthetic data from the indoor coverage map, we developed an ML-based scheme. This framework enables precise indoor localization within the coverage map, and helps identify user locations in the area of interest.
The novelty of our approach is summarized as follows.
- We suggest a machine learning method to generate an indoor coverage map and precisely locate users by leveraging the capabilities of RSSI signals.
- The construction of the REM relies on a machine learning scheme that uses multiple APs to record RSSI measurements gathered by a mobile robot. This strategic approach enables operators to clearly visualize coverage predictions, and accurately identify potential shadow areas on the indoor REM. Our study focuses on localization by utilizing a coverage prediction map specifically considering RSSI signals within an indoor environment of the University of Ulsan.
- To build the dataset for training our ML algorithm for localization, we primarily use a K-nearest neighbor search to select each step. We start by randomly selecting the first point within each sample, then identify the eight nearest neighbors to determine the subsequent step. This iterative process is repeated for K steps to construct a single sample. This procedure is repeated until we achieve the desired number of samples for the dataset.
- We thoroughly evaluate several machine learning algorithms, including the random forest regressor, Extra-Trees Regression (ETR), an artificial neural network (ANN), and AdaBoost regression. By rigorously applying the 10-fold cross-validation technique, we determine the best regressor algorithm for our proposed approach, focusing on minimizing the localization error.
2. Related Works
Yu et al. [30] presented an indoor localization system called MMLOC, which utilizes smart APs equipped with multi-mode antennas. This system compensates for the instability of conventional Wi-Fi fingerprint-based localization methods, which suffer from the unreliability of privately deployed APs. MMLOC reduces the need for numerous APs by generating multiple fingerprints with fewer APs through mode-switching antennas. The mobile terminal can then discern the RSSI for different antenna modes without requiring synchronization. A prototype of MMLOC was developed for the Android platform, demonstrating that it can halve the number of necessary APs while maintaining or improving localization accuracy. This system’s advantage lies in its reliance on fewer, well-deployed smart APs, avoiding the use of less stable private APs and enhancing stability and accuracy. The approach involves a clustering-based localization strategy that allows mobile terminals to determine the current mode of the smart APs and match RSSI measurements to the correct fingerprint map. Evaluation of the system revealed that MMLOC could achieve an accuracy equivalent to or superior to traditional RSSI-based systems with half the number of APs, thereby presenting a practical solution for environments where AP deployment is limited.
Palacios et al. [31] discussed two localization algorithms specifically tailored for millimeter-wave (mm-wave) networks. These algorithms are designed to exploit the unique propagation characteristics of mm-wave communications, focusing on range-free localization schemes that leverage angle of arrival (AoA) information. The study introduced two approaches: triangulate-validate and angle difference-of-arrival, both of which can work with multiple anchors or as few as a single anchor. The paper asserts that these algorithms are computationally lightweight, enabling their use in devices with limited computational resources. The results of the study, derived from both simulations and real-world measurements with commercial 60 GHz mm-wave devices, suggest that these algorithms can achieve sub-meter accuracy in most cases. This high degree of accuracy holds even with only a single access point, though multiple access points can substantially improve localization accuracy, particularly in large indoor spaces. Overall, their research contributes to the optimization of network operations, including aspects like location-driven beam steering and access point association, by providing precise location-based services through efficient and effective mm-wave localization schemes.
Labinghisa et al. [32] provided a study on indoor localization accuracy using virtual access points (VAPs) in Wi-Fi environments combined with a Kalman filter (KF) and a particle filter (PF). The study introduced a method of generating VAPs through statistical modeling using RSSI data from existing physical APs. This approach extends the network infrastructure virtually without the need for additional physical routers. The authors incorporated advanced KF and PF techniques to refine the signal data, mitigating issues like signal noise and fluctuations that commonly affect RSSI-based systems. The experimental results demonstrated that integrating VAPs with KFs and PFs significantly improves localization accuracy compared with traditional methods. This model effectively reduces error margins and enhances the reliability of indoor positioning systems, offering a cost-effective solution by leveraging the existing Wi-Fi infrastructure and sophisticated filtering algorithms. The paper concludes that the proposed system not only addresses the challenges of indoor localization, but also sets a foundational approach for further research in this field.
Zhang et al. [33] explored the use of an intelligent reflecting surface (IRS) to enhance the accuracy of passive indoor localization systems that utilize commodity Wi-Fi devices. Traditional Wi-Fi-based localization faces challenges due to the limited spatial resolution of Wi-Fi signals. The proposed approach leverages an IRS composed of numerous controllable reflective elements to modulate the spatial distribution of Wi-Fi signals, surpassing these limitations. The study introduced specific techniques for single-person and multi-person scenarios. For single-person localization, it derives a closed-form solution for optimally controlling the phase shift of the IRS elements to achieve accurate localization. In multi-person environments, a side-lobe cancellation algorithm is proposed to handle the near–far effect, enabling more precise localization of multiple individuals. Extensive simulations confirm that the framework can achieve sub-centimeter accuracy in localizing multiple moving persons without altering the existing Wi-Fi infrastructure. This system could potentially revolutionize applications such as monitoring the elderly, tracking real-time positions of criminals, and general indoor navigation, improving both the accuracy and feasibility by utilizing existing Wi-Fi technology coupled with the IRS.
Han et al. [34] devised a method for indoor localization that relies on a single access point, significantly enhancing the precision and reducing the complexity. By collecting channel state information (CSI) from standard Wi-Fi devices, the study proposes corrections for linear errors in CSI to better mirror real transmission data. Additionally, it refines the traditional MUSIC algorithm to more accurately determine the angle of arrival (AOA) and time of arrival, which are crucial for localization. The enhanced approach allows for the identification of a direct transmission path and calculates the user’s position based on the data, achieving an average positioning error of less than one meter. This method provides a cost-effective and simpler alternative to multi-access point systems, making it suitable for environments where extensive AP deployment is impractical.
Vy et al. [35] introduced an indoor localization method combining smartphone inertial sensors and a single Wi-Fi access point to achieve precise localization in environments where Wi-Fi access point density is low. This method, known as Pedestrian Dead Reckoning with Step Compensation (PDRSC), is particularly designed for smartphones with limited computational resources and can be implemented directly on devices like the iPhone 7. The study demonstrated the system’s effectiveness through experiments conducted in a large shopping mall in Korea, using public Wi-Fi services to track a mobile user. The results show a high localization success rate of about 92% within a two-meter error margin, highlighting the method’s potential for accurate and energy-efficient indoor positioning.
Jiang et al. [36] proposed a Wi-Fi fingerprint localization method that emphasizes the role of important access points (IAPs) in indoor environments. The proposed method identifies access points with the highest received signal strength (RSS), labeling them IAPs, and uses them to simplify the fingerprint matching process during localization. This approach reduces the computational load by narrowing the search to fingerprints with the same IAP as the estimated fingerprint from the database. The algorithm combines the distance and the AP repetition of fingerprints to calculate similarity, improving the localization accuracy. Experiments demonstrated that this method achieves high precision in indoor settings without needing the environmental layout or additional equipment, making it practical for real-world applications. The system’s efficiency and effectiveness in utilizing Wi-Fi networks and mobile phones for indoor positioning reflect its potential for widespread adoption in various crowded places like offices and malls.
Zhou et al. [37] investigated a Wi-Fi indoor localization method that significantly improved accuracy by considering the variability in signal distributions and the varying contributions of different APs. The method introduced a hybrid statistical test framework that includes the Jarque–Bera test to assess the normality of signal distributions at reference points, as well as Chi-squared Automatic Interaction Detection for determining the contributions of individual APs. This approach integrates the Mann–Whitney U and T tests to identify the best reference points matching newly collected RSS data. The final location estimate is refined by weighting the contributions of each AP in a K-nearest neighbors calculation. Extensive experimental results validated the proposed method’s enhancements of both accuracy and robustness compared to traditional Wi-Fi-based indoor localization techniques.
Camana et al. [38] proposed REMs using clustering and machine learning techniques for better indoor coverage. Their approach uses real-time measurements gathered by a TurtleBot3 robot to frequently update an REM in dynamic wireless environments. The methodology begins with the K-means algorithm using historical data to determine cluster numbers, and each cluster’s data are used to train a random forest model. As new data measurements are collected, they are assigned to a cluster, and the RF model is updated. This method provides essential timely updates from changing conditions due to physical element movements, environmental factors, and so on, offering significant improvements in wireless network management. The simulation results confirmed that this method outperformed several well-known machine learning algorithms and standard methods without clustering.
Ullah et al. [39] proposed that the Extended Kalman Filter (EKF) is better than the traditional Kalman Filter (KF) at handling complex systems. EKF is especially good for real-world problems because it can deal with random errors in both the system and the predictions. The study focused on figuring out where robots are in places without reliable GPS, like inside buildings or crowded cities, using wireless sensors. By combining the EKF with faster computer processing, it improved the speed and accuracy of finding the robot’s location. Tests showed their method worked better than other existing methods, even when conditions changed. However, obtaining accurate information about errors is still a problem with the EKF. To make it even better, future studies could combine the EKF with other methods like the Unscented Kalman Filter or Particle Filter.
Ullah et al. [40] provided a detailed analysis of recent advancements in determining mobile robot locations, especially when these robots are connected to smart networks (IIoT). The study focused on different methods for locating robots indoors and outdoors, along with the potential security risks involved. Key challenges include ensuring precise location tracking in changing environments, protecting against vulnerabilities created by connecting to smart networks and developing adaptable systems to handle errors in sensor data and unpredictable conditions. The research examined how to use different computing approaches (cloud, fog, and edge) for the robot location, each with its advantages and drawbacks. Additionally, the study explored the use of robot location technology in various industries, from manufacturing to customer service, emphasizing the crucial role of security in maintaining accurate location information. The paper concludes by suggesting areas for future research to improve the reliability and security of robot location systems.
Jia et al. [41] investigated an optimization framework for wireless local area network access point deployment to improve the reliability of indoor localization systems. The main focus was on the strategic placement of access points to maximize coverage and minimize localization errors while staying within a fixed budget. Their paper introduced a hybrid optimization technique that combines the geometric dilution of precision and fingerprint differences to determine optimal access point configurations. This approach considers real-world factors such as walls and human presence, which can affect signal propagation. The methodology was validated through extensive simulations, showing that it can significantly enhance both the coverage and accuracy of indoor localization systems, making it a valuable strategy for complex environments like large buildings or areas with dense obstructions.
The sections of our paper are organized as follows. Section 3 provides a detailed description of the data collection process and methodology. Section 4 contains a description of the proposed REM methodology for indoor localization. Section 5 offers a comprehensive overview of various regression techniques. In Section 6, we present error matrices along with graphic explanations of accuracy levels, as well as graphic results from REM construction. Finally, Section 7 concludes the paper.
3. Data Collection Methodology
This study develops and implements a radio environment map and enhanced indoor localization by using Room 515 in the Electrical Engineering Building at the University of Ulsan in Republic of Korea. The TurtleBot3 Burger, (TurtleBot, Mountain View, CA, USA) a mobile robot equipped with a suite of sensors and systems, was central to our data collection strategy. All of the equipment was sourced from Ulsan, Republic of Korea. The robot’s key components include a Raspberry Pi single-board compute, (Raspberry Pi Foundation, Cambridge, UK), an OpenCR embedded controller, a 360-degree LDS-02 LiDAR sensor, an inertial measurement unit, and an encoder, all integrated through the robot operating system for optimal operational communication. The TurtleBot3 autonomously navigated the indoor environment, systematically collecting data to aid in constructing a detailed REM. Over the course of the experiment, approximately 7000 data points were collected covering the 6 m × 7 m × 2.5 m room. In Figure 1, we examine a research lab at the University of Ulsan. These data were refined to 600 RSSI-predicted samples, crucial for our advanced localization model. The Hovermap HF1, a mobile LiDAR 3D (Emesent, Queensland, Australia) scanner, was deployed alongside the TurtleBot3, enhancing data collection by providing detailed 2D environmental mapping and supporting simultaneous localization and mapping algorithms. Data synchronization was meticulously executed using timestamps that aligned the RSSI and localization data precisely. The experimental setup included the use of an IPTime N704M router (Seoul, Republic of Korea) at 2.4 GHz as the Wi-Fi signal source, providing stable signals essential for accurate RSSI measurements. RSSI data were collected using the built-in TurtleBot3 Wi-Fi module, employing the iwconfig tool to capture detailed network interface information such as SSID, signal frequency, and link quality. The localization experiments were conducted by varying the number of Wi-Fi access points from one to three in order to examine the effects of access point density on localization accuracy. The initial setup with a single access point established a baseline for the signal distribution, which was then scaled to include two and three access points in strategic configurations to challenge and enhance the system’s complexity and signal mapping capabilities. Integration of this comprehensive dataset with our REM localization strategy, which included the robot’s X and Y coordinates and the RSSI values, allowed for an in-depth analysis using various regression techniques. The ETR algorithm was particularly notable for its performance in predicting continuous target variables, thus enhancing our model’s accuracy in generating a coverage map based on RSSI signals [7]. All the equipment has been is Republic of Korea.
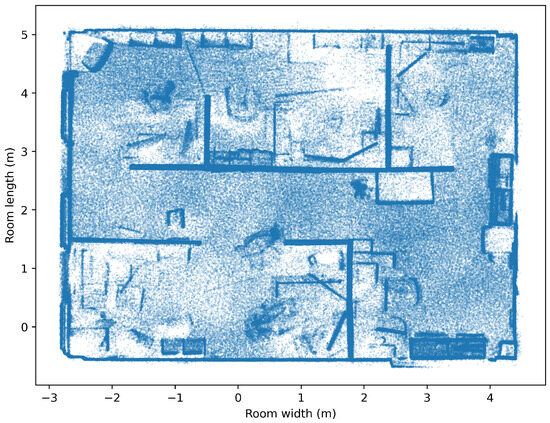
Figure 1.
Sketch of the research lab at the University of Ulsan.
This approach not only reinforced the ability of the TurtleBot3 to achieve high precision in autonomous navigation and data acquisition, but also showcased the potential of advanced REM and indoor localization systems to significantly enhance the understanding of and interaction with complex indoor environments. Through these methodologies, our research pushes the boundaries of accuracy in indoor localization, paving the way for more effective applications in smart building management, navigation assistance, and automated monitoring systems.
4. Proposed Methodology for REM and Indoor Localization
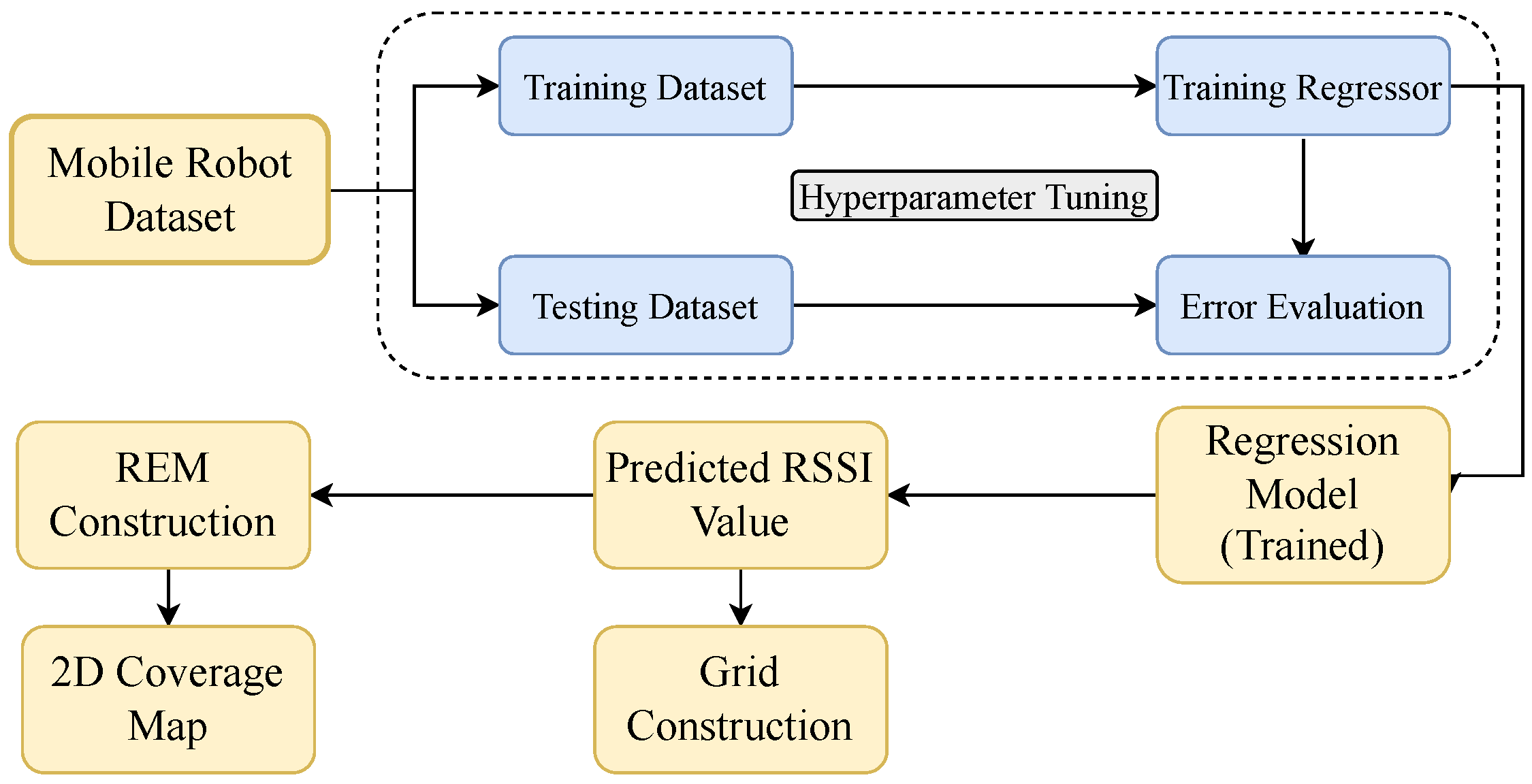
In Figure 2, we illustrate the proposed ML-based indoor localization framework, outlining the process of our proposed system model. We began by splitting the data into training and testing datasets to evaluate the accuracy of our ML algorithm, which was tasked with predicting RSSI values across a grid that uniformly covered the area of interest after data collection through the mobile robot. This step was crucial for constructing the REM. We then utilized various regression techniques to refine the 2D-floor plan of REM, implementing advanced methods to ensure precision in our model.
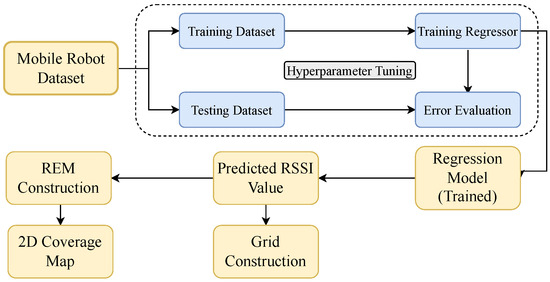
Figure 2.
The proposed REM construction.
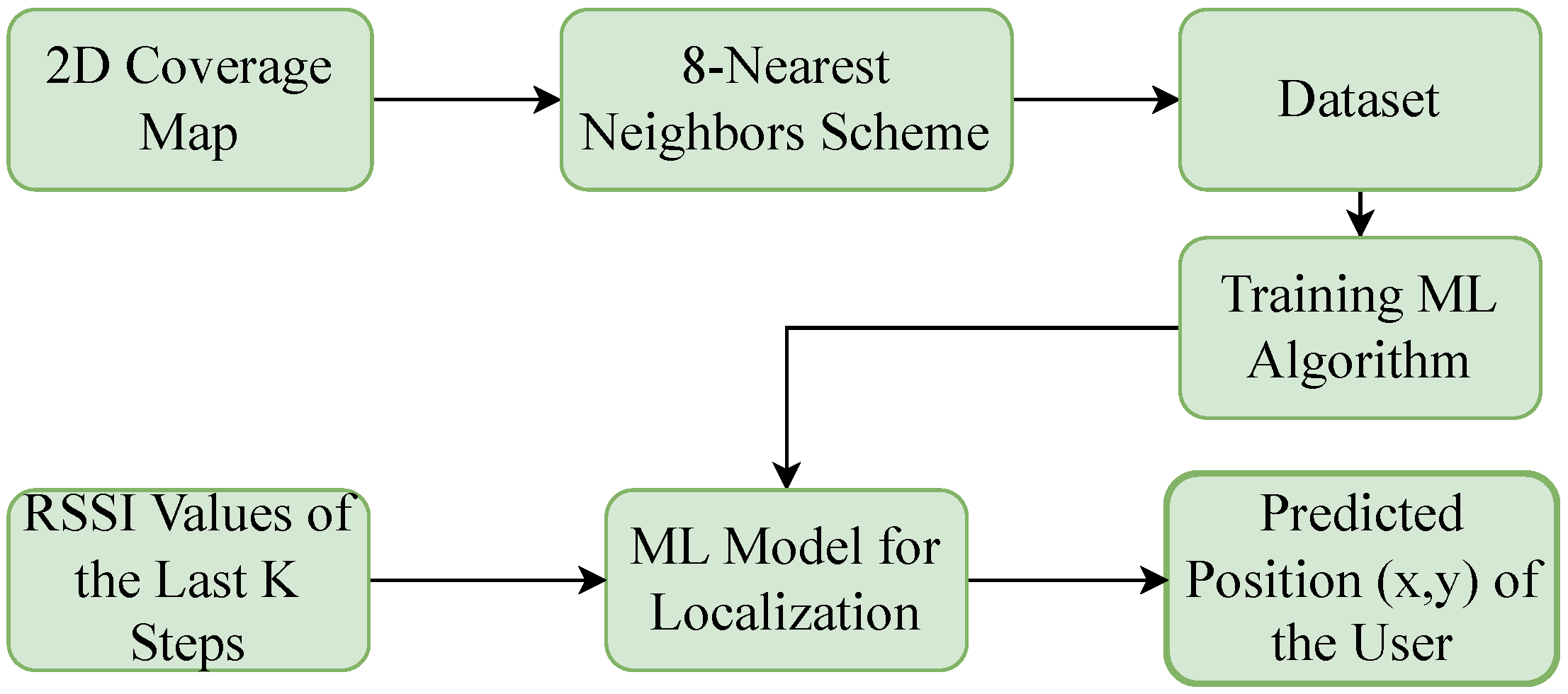
In Figure 3, we use the RSSI signals captured in the REM as input features, with the coordinates (x, y) serving as labels for indoor localization. This structured approach allowed us to systematically organize the data by linking RSSI readings with specific points on the REM. Our dataset construction was guided by an eight-nearest neighbors scheme, where each data sample included a sequence of steps detailing the RSSI values and their corresponding positions. Each data point included an RSSI value and its (x, y) location, which together defined a user position. A single dataset entry consisted of a sequence of N such steps. For instance, the initial dataset sample might comprise the features RSSI1, RSSI2, …, RSSIN, with the position of the last step xN, yN targeted for prediction.
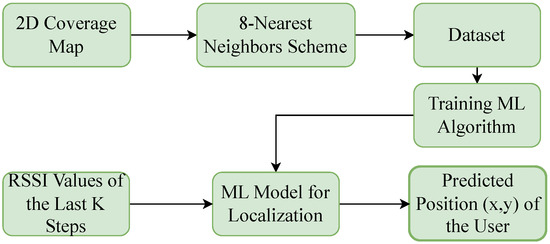
Figure 3.
The proposed ML-based indoor localization framework.
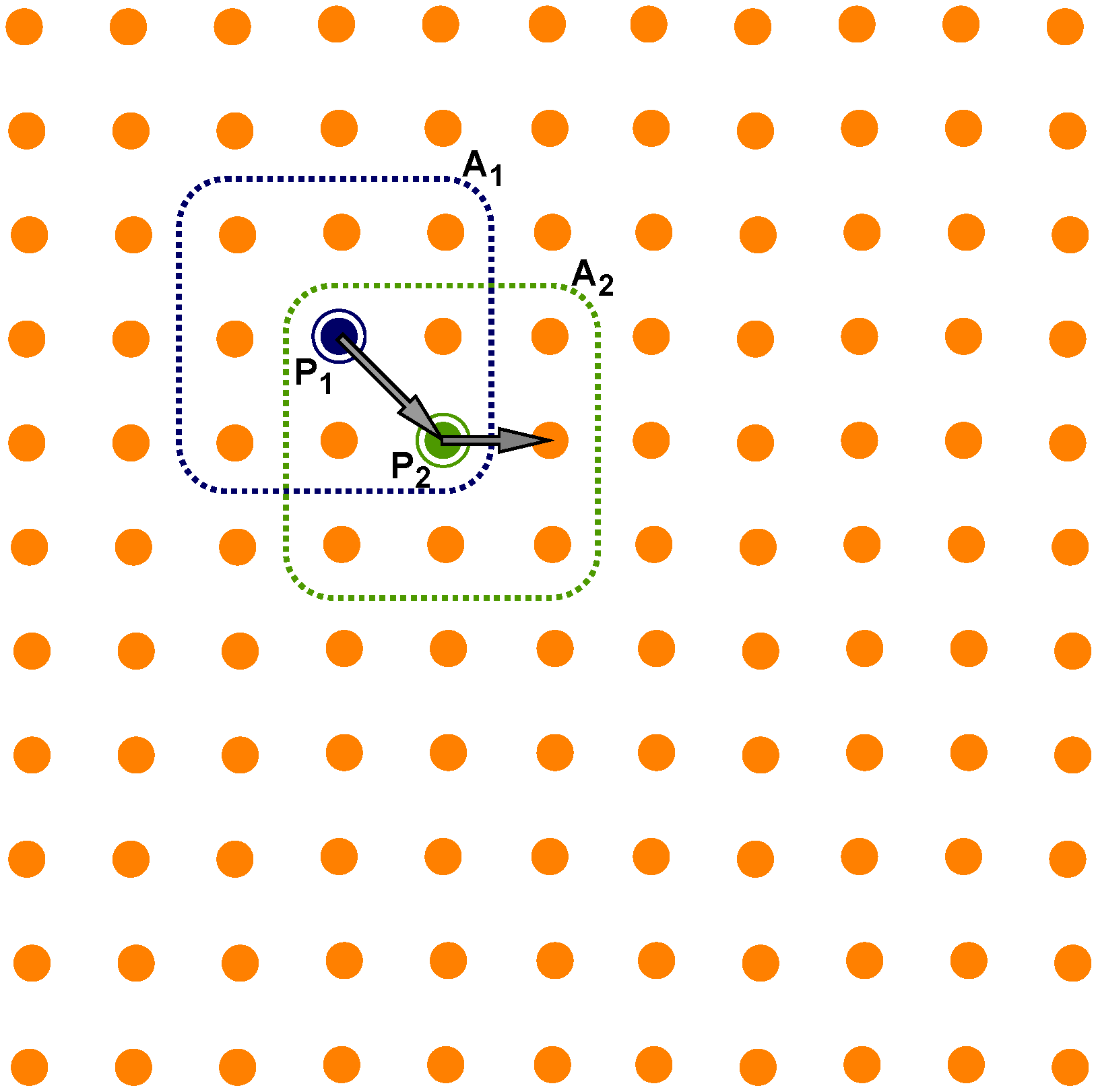
In Figure 4, the selection process for each step involves a nearest-neighbor search, starting with a randomly chosen point, P1, followed by identifying its eight nearest neighbors, labeled A1. Subsequently, a second point, P2, was randomly selected from these neighbors and the process repeated, acquiring eight new neighbors, labeled A2, for this second point, then selecting a third point at random. This method continued iteratively until N steps were completed, thus forming one complete sample. By compiling 1000 such samples, we developed a dataset that encompassed a wide variety of user paths and locations.
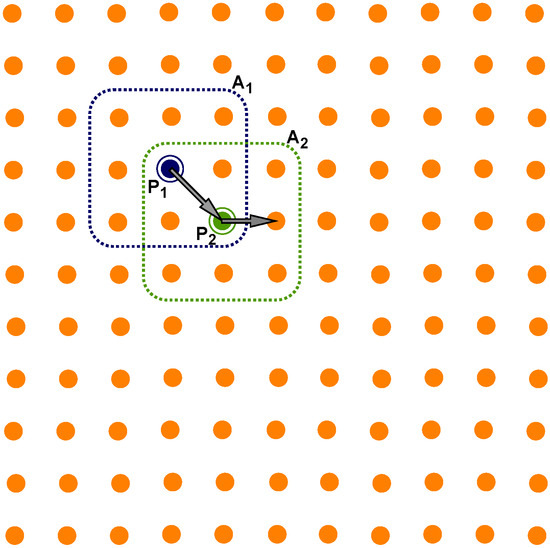
Figure 4.
The 8-nearest neighbors scheme for localization.
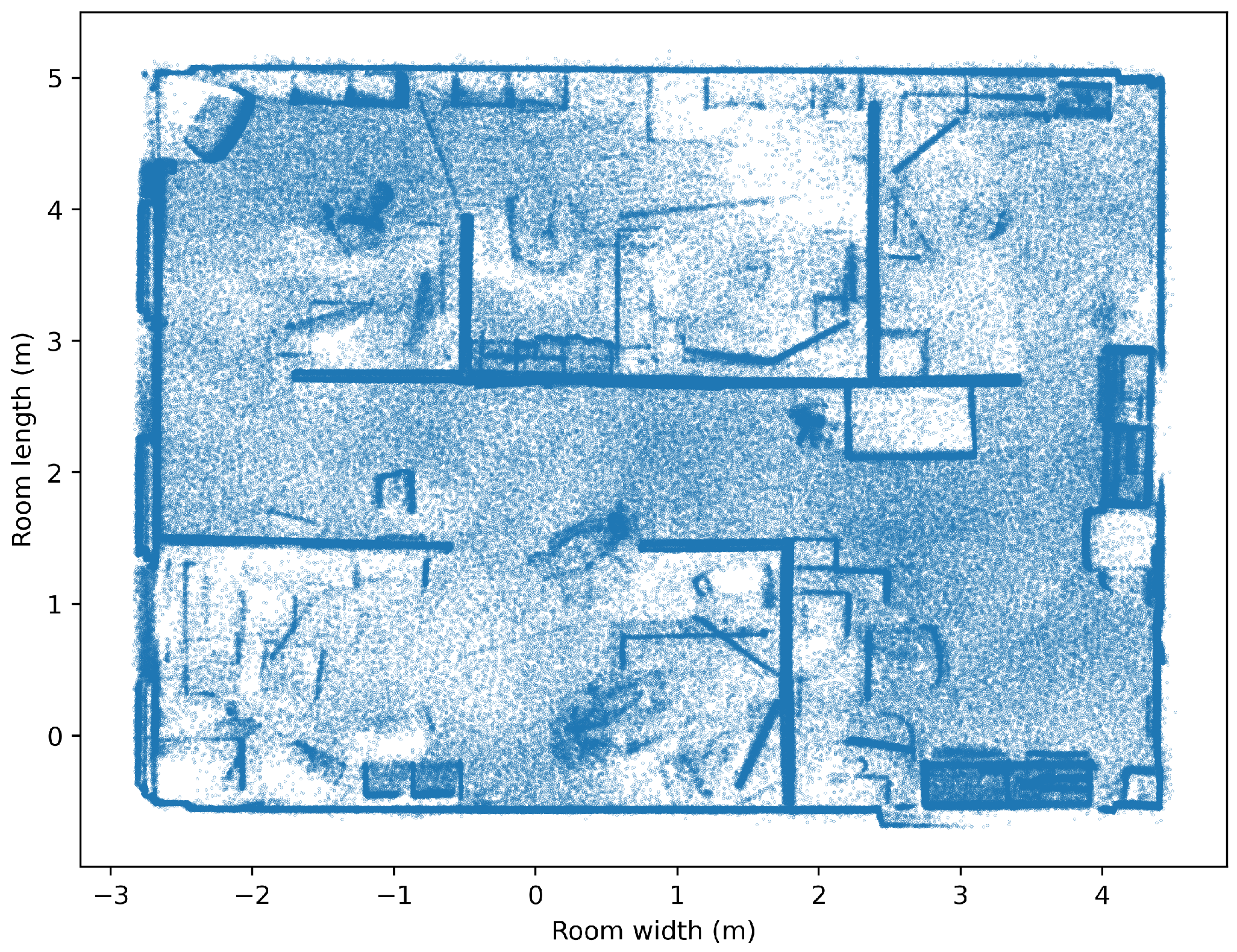
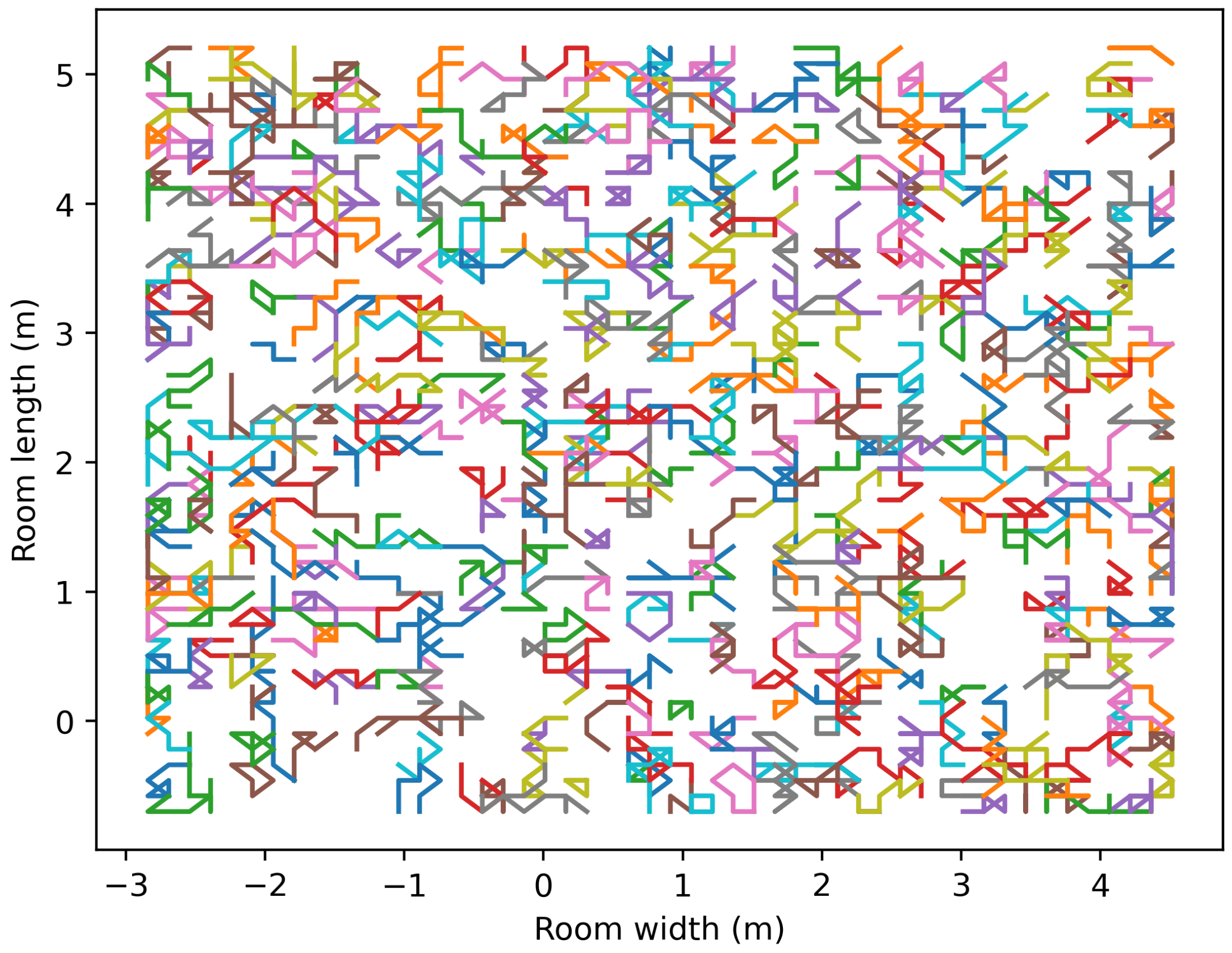
The dataset utilized for the indoor localization approach, which employed the eight-nearest neighbors method, is depicted in Figure 5. Each row in the figure represents one sample from the dataset, with each sample containing a sequence of steps from multiple users. In our system, we carefully integrated 600 samples, each comprising eight distinct steps. This detailed preparation of the dataset was conducted to enhance the accuracy and efficiency of the indoor localization process.
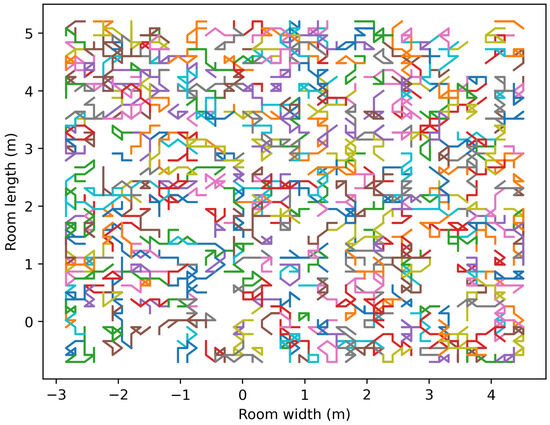
Figure 5.
Implementing an eight-nearest neighbors approach in an indoor localization dataset, where each color represents a sample of the user’s location.
ETR Scheme for Localization
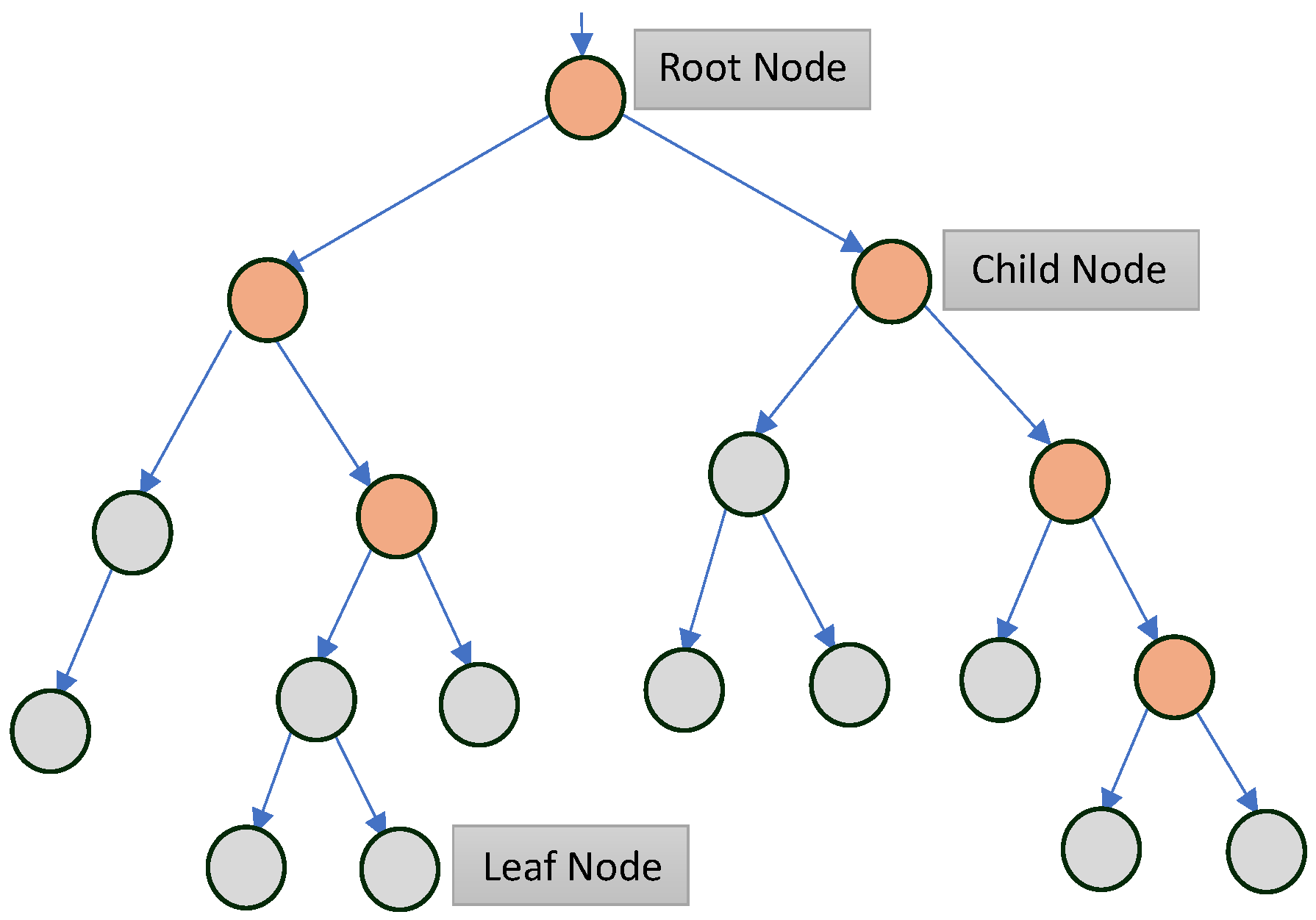
In our research, we employed ensemble learning methods, specifically ETR and random forest, which are well regarded for their efficacy in handling supervised classification and regression tasks. These techniques utilize the strength of multiple decision models to boost performance, constructing independent base learners by employing a range of training algorithms and incorporating randomization during tree construction. In Figure 6, we demonstrate the decision tree structure within an ETR scheme for localization, highlighting the key decision points in the process. This randomization enhances tree diversity, which diminishes correlations among trees and improves their independence, although it can pose computational challenges with large datasets. To address these challenges, we adopted the faster ETR algorithm, known for its efficient prediction capabilities in indoor localization. The ETR algorithm differentiates itself by randomly selecting the features for each decision tree as well as the split points during tree construction. It uses the entire training dataset for each tree, building a comprehensive model through a top-down approach that progresses from the root node to leaf nodes, applying random subsets of features and split decisions at each node. Moreover, we enhanced the dataset’s resolution for our localization model through the eight-nearest neighbors scheme applied to the 2D coverage map, focusing on the eight closest data points to refine the training data for the machine learning algorithm. This method produced a synthetic dataset that trains the ML algorithm to effectively predict user positions within the coverage area, accurately determining x and y coordinates. The approach represents a full-cycle application—from data collection and processing to employing machine learning techniques—ensuring precise user localization in wireless networks.
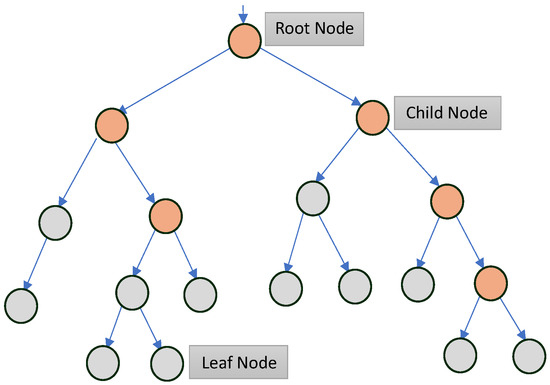
Figure 6.
A decision tree structure within an ETR scheme for localization.
The ETR algorithm operates by generating multiple independent decision trees designed to predict target values from a set of features within the dataset. Formally, consider a training dataset, , where n ranges from 1 to N samples, and denotes a -dimensional vector that includes F features and two target variables to be predicted. For each decision tree, a subset of the training dataset is allocated to each child node r. At every node r, the ETR algorithm determines the optimal split by utilizing the training subset and a randomly selected subset of features, as described in Algorithm 1.
To further explain this, the subset at child node r is divided into two sets: , which includes the samples that meet the split criterion, and , containing the remaining training samples. The selection of the optimal split is based on minimizing the mean squared error (MSE), which serves as the scoring function. This process is repeated at each child node until the subset reaches the minimum required number of samples for splitting, denoted as , or until all samples in the subset have the same label. The label of the samples in subset then determines the outcome at each leaf node. During the testing phase, each test sample moves through the decision tree, passing through each child node, guided by the selected splits, until it reaches a leaf node.
| Algorithm 1 Selection of the split rule in the ETR-based scheme |
1. Input: training subset F-dimensional vector made from sample number of attributes selected randomly minimum number of samples required to split a node 2. If or the node has a label for each observation it contains: When splitting is complete, classify the node as a leaf node. 3. Else Choose a random subset of H features from among the original F features. 4. For each feature h in the subset Do: Find and as the lower and upper bounds of feature h in subset . Obtain a random cut-point, , uniformly in the range Set End for 5. Select a split such that 6. Output: Best split at child node r. |
This approach ensures that each tree within the ETR model independently contributes to the final ensemble prediction, leveraging the strength of multiple models to enhance the prediction accuracy and robustness.
5. Machine Learning Regression Baseline Schemes
Regression techniques, which are a collection of statistical methods that establish a connection between one or more independent variables and a dependent variable, vary in terms of their assumptions about the data, about the nature of the relationship they model, and the complexity of the model. These techniques include linear regression, ETR, ridge regression, and AdaBoost regression. Overall, regression techniques are effective tools for understanding the relationships between variables and making predictions about the future based on past data. This section provides a brief description of some ML baseline schemes.
5.1. Random Forest Regressor
The objective of employing a random forest regressor within our framework was to develop a model distinguished by its accuracy and reliability, suitable for both classification and regression challenges. This method constructs an ensemble of numerous decision trees, each trained on a randomly selected subset of data and features, which enhances the model’s diversity and reduces the likelihood of overfitting. The collective output of these trees, determined through averaging in regression tasks, forms the regressor’s final prediction. Notably, the random forest approach is celebrated for its ability to efficiently manage large datasets, uncover intricate variable relationships, and deliver precise outcomes. Key parameters influencing this model include the total number of trees and their maximum depth, among others, which are meticulously calibrated to optimize performance [38].
5.2. AdaBoost Regressor
In our study, the AdaBoost regressor was selected for its proficiency with datasets characterized by significant noise or complexity. This regressor, adaptable across various regression scenarios, excels in integrating numerous weak learners to form a robust model capable of accurately forecasting the desired outcome. It demonstrates remarkable versatility, accommodating both continuous and categorical variables effectively [42].
5.3. Support Vector Regressor
Support vector regressors (SVRs), known for their flexibility, are employed across both regression and classification frameworks. They operate by identifying an optimal hyperplane that maximizes the margin between data categories while minimizing errors. SVRs are categorized into kernel-based and linear variants to address complex and straightforward data structures, respectively. The balance between margin maximization and error reduction is finely tuned via the C parameter. Despite their prowess in handling high-dimensional data like text and image classifications, SVRs may entail a higher computational demand to deal with large datasets, and they exhibit sensitivity to kernel selection [43].
5.4. Bagging Regressor
A Bagging Regressor, short for Bootstrap Aggregating, is an ensemble learning technique aimed at enhancing the accuracy and stability of regression models. It achieves this by creating multiple subsets of the original dataset through random sampling with replacement, known as bootstrap samples. Each subset trains a separate regression model, often a decision tree, which tends to have high variance. The predictions from all models are then averaged to form the final output. This averaging reduces the overall variance and makes the model more robust to overfitting and noise. The key advantage of a Bagging Regressor is its ability to improve the performance of high-variance models, resulting in more accurate and stable predictions compared with a single model [44].
5.5. Artificial Neural Network
ANNs, designed to mimic human learning processes, consist of interconnected nodes with specific weights and thresholds across input, hidden, and output layers. These networks become active upon exceeding set thresholds and are recognized for their nonlinear computational abilities, applicable in both end-user devices and network infrastructure. ANNs adapt to various learning modes, including supervised and unsupervised methods, with parameter optimization during training to minimize prediction errors. However, the choice of network architecture and prevention of overfitting are crucial for their effective application in practical settings [45].
6. Numerical Analysis
6.1. Error Evaluation for the REM Contruction
This section elaborates on error measurement techniques utilized to assess the accuracy of REM constructions. The dataset for this was gathered by a mobile robot, comprising positional features (coordinates x and y in meters) and the target RSSI values measured in decibel milliwatts. To evaluate predictions against the actual measurements, root mean square error (RMSE) has been used.
RMSE provides a measure of the magnitude of a prediction error. It calculates the square root of the average of the squares of the deviations; that is, the square root of the MSE. It is particularly sensitive to large errors, which is critical in many real-world problems. The RMSE is computed as follows:
where N is the total number of data samples, represents the true RSSI values, represents the predicted RSSI values, and N is the total number of observations.
RMSE is crucial for analyzing how well a model performs across different contexts because it measures how closely the predicted values match the actual values. In this instance, it is particularly useful for refining and validating the REM based on RSSI values, ensuring the map’s reliability and accuracy in representing the radio environment. The RMSE is converted and reported in decibel milliwatts to maintain consistency with the original data format used in the study.
Three different access points were used to create the REM in three different locations within the room, and the error calculation was performed using RMSE. Table 1 shows that ETR performs better than the other regression models, with the lowest RMSE values for all access points, indicating a superior performance. Random Forest and Bagging Regressors have slightly higher error rates, while ANN and others have the highest error rates, making them the least effective for this application. At the end of this section, we provided a visual representation of the APs’ positions, clearly showing that the AP locations are near the red-marked areas. As the APs are not identical devices, there is a slight variation in the error ratio between each AP.

Table 1.
Error evaluations of the REM.
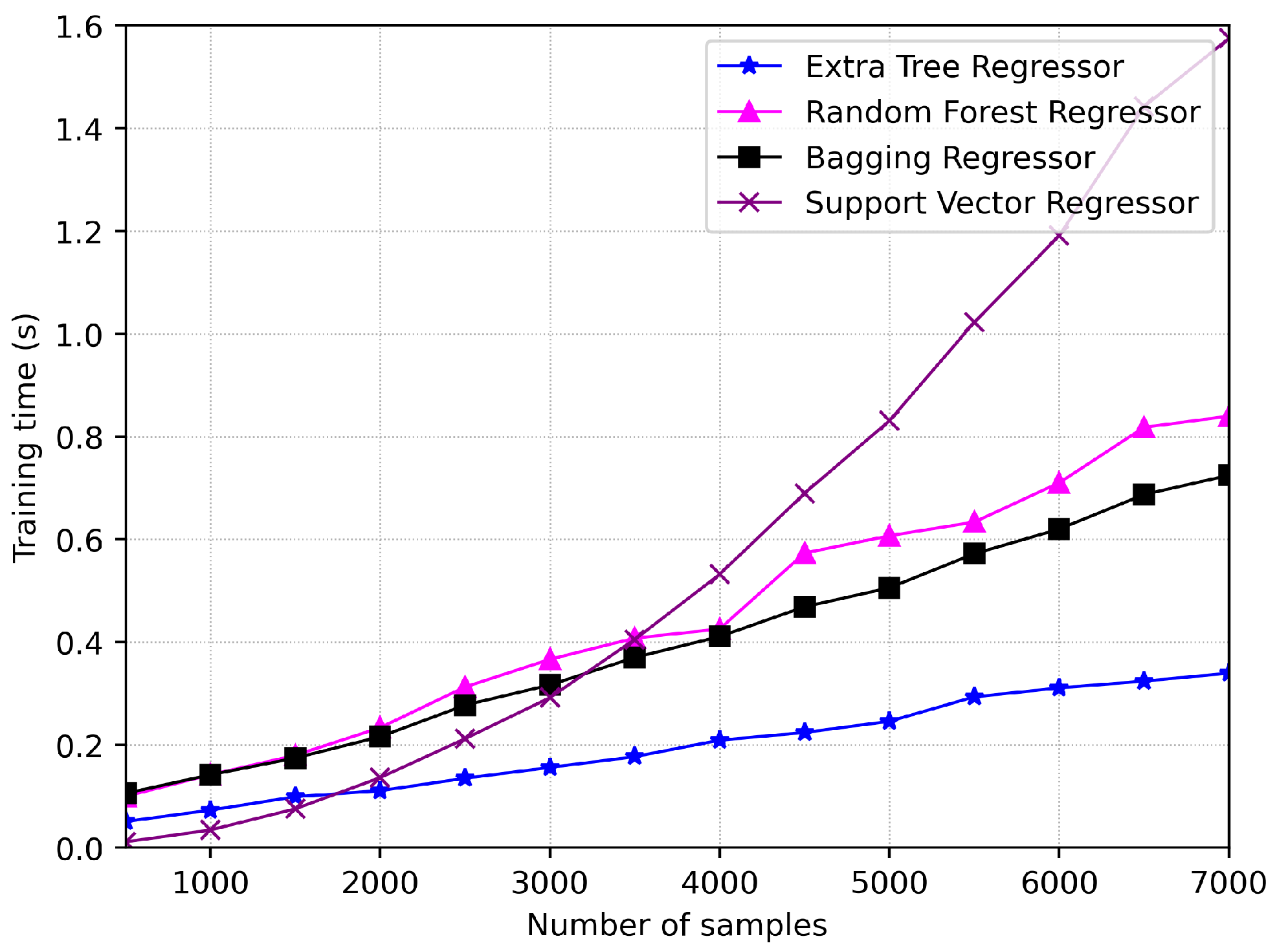
In Figure 7, the training times for different regression algorithms across various sample sizes are illustrated. ETR consistently shows the shortest training times, followed by the Random Forest Regressor with slightly longer times using RMSE. The Bagging Regressor exhibits moderate training times, while the Support Vector Regressor has the longest training times. Overall, ETR is the most efficient, whereas the Support Vector Regressor is the least efficient as the sample size increases.
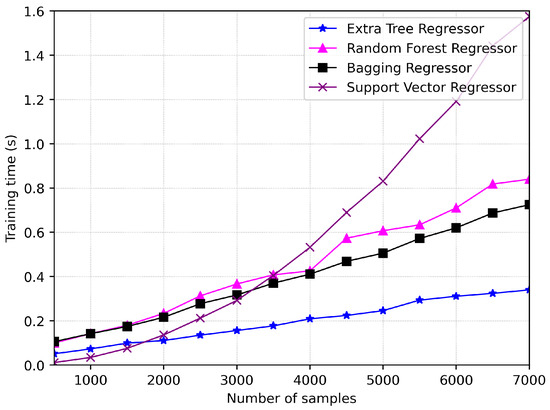
Figure 7.
Error evaluation considering AP-1 of the REM.
6.2. Error Evaluation for the Localization
The primary metric for evaluating algorithm performance is the Euclidean distance between the user’s true location and the predicted location. These points, denoted as and , respectively, are both points in the Cartesian coordinate system. The average location error across all data points in the dataset is computed using the following formula:
where the Euclidean distance between two locations is denoted by the operator, and N is the total number of data samples.
Table 2 compares different machine learning algorithms used for indoor localization, evaluating their performance across three configurations: a single access point, dual access points, and three access points. Each configuration’s effectiveness was measured by the error rate, with lower values indicating a higher localization accuracy. The Extra Trees Regressor (ETR) showed a gradual improvement in accuracy as the number of access points increased, with a noticeable reduction in error rates between the single access point and three access points. The other algorithms also showed improvements, with the best performance consistently achieved by the ETR algorithm. Overall, the data suggest that increasing the number of access points generally enhances the accuracy of indoor localization across all evaluated machine learning algorithms, with varying degrees of improvement.
Table 2.
Error evaluations of indoor localization.
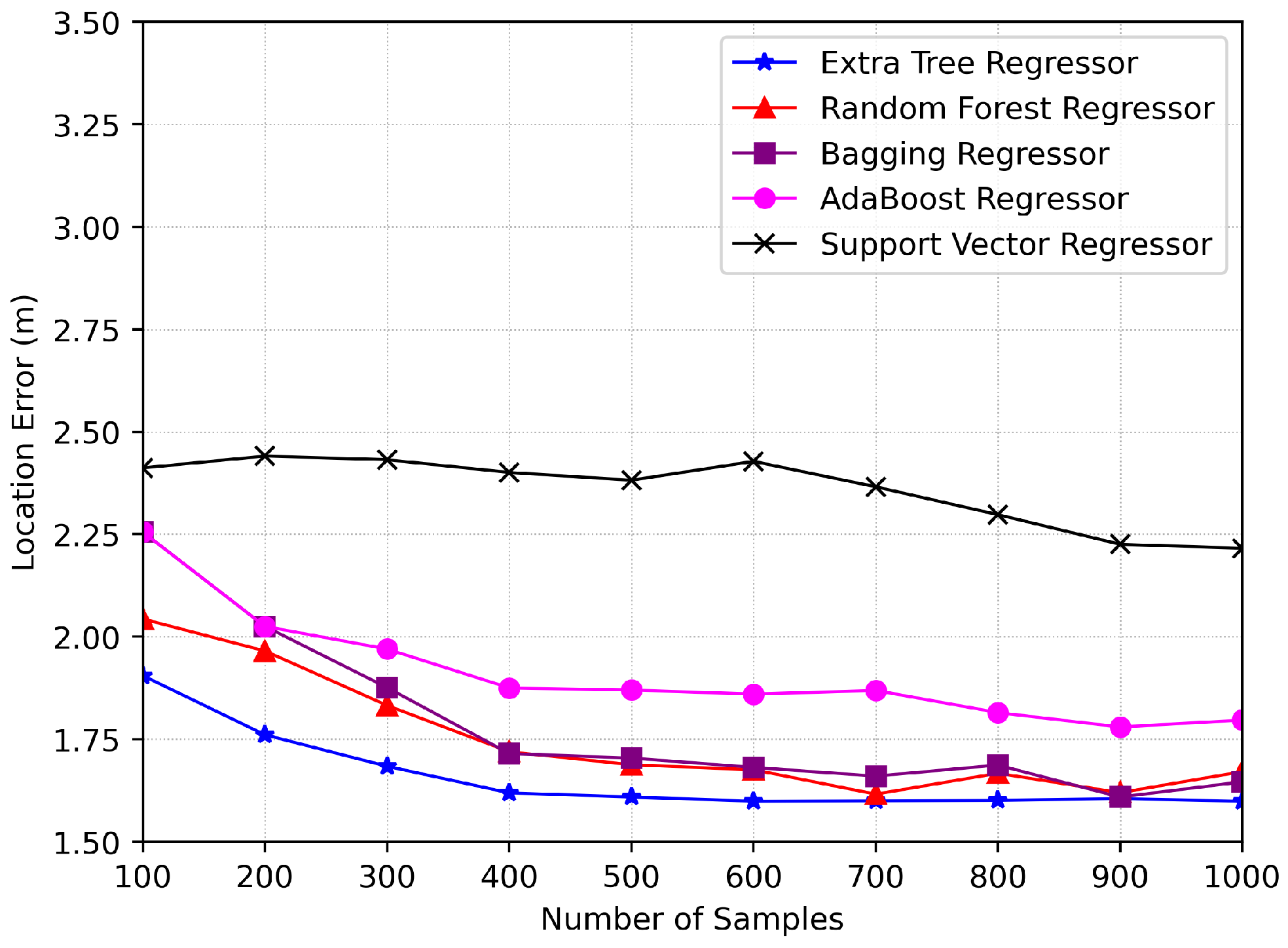
Figure 8 illustrates the localization error across varying sample sizes for hyperparameter tuning of different regression algorithms, emphasizing performance differences in indoor localization using a single AP. As the number of samples increased from 100 to 1000, the Random Forest Regressor, Bagging Regressor, and Support Vector Regressor (SVR) exhibited a reduction in localization error, indicating improved accuracy with more training data. The Extra Trees Regressor (ETR) consistently achieved the lowest error rate, demonstrating a superior performance. The Random Forest Regressor followed closely, also showing significant error reduction with more samples. In contrast, SVR consistently showed the highest error rates, with only a gradual improvement as the sample numbers increased. Overall, the graph highlights the effectiveness of ensemble methods, particularly the ETR algorithm, which shows that 600 samples is the optimal value for our system model. We evaluated a single access point and set the parameters for the remaining access points accordingly.
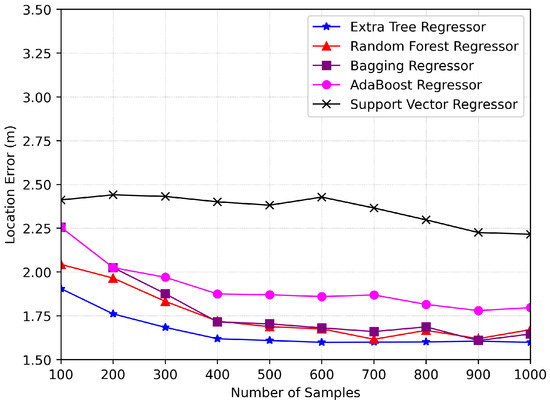
Figure 8.
Error evaluation for localization considering a single AP (sample vs. location Error).
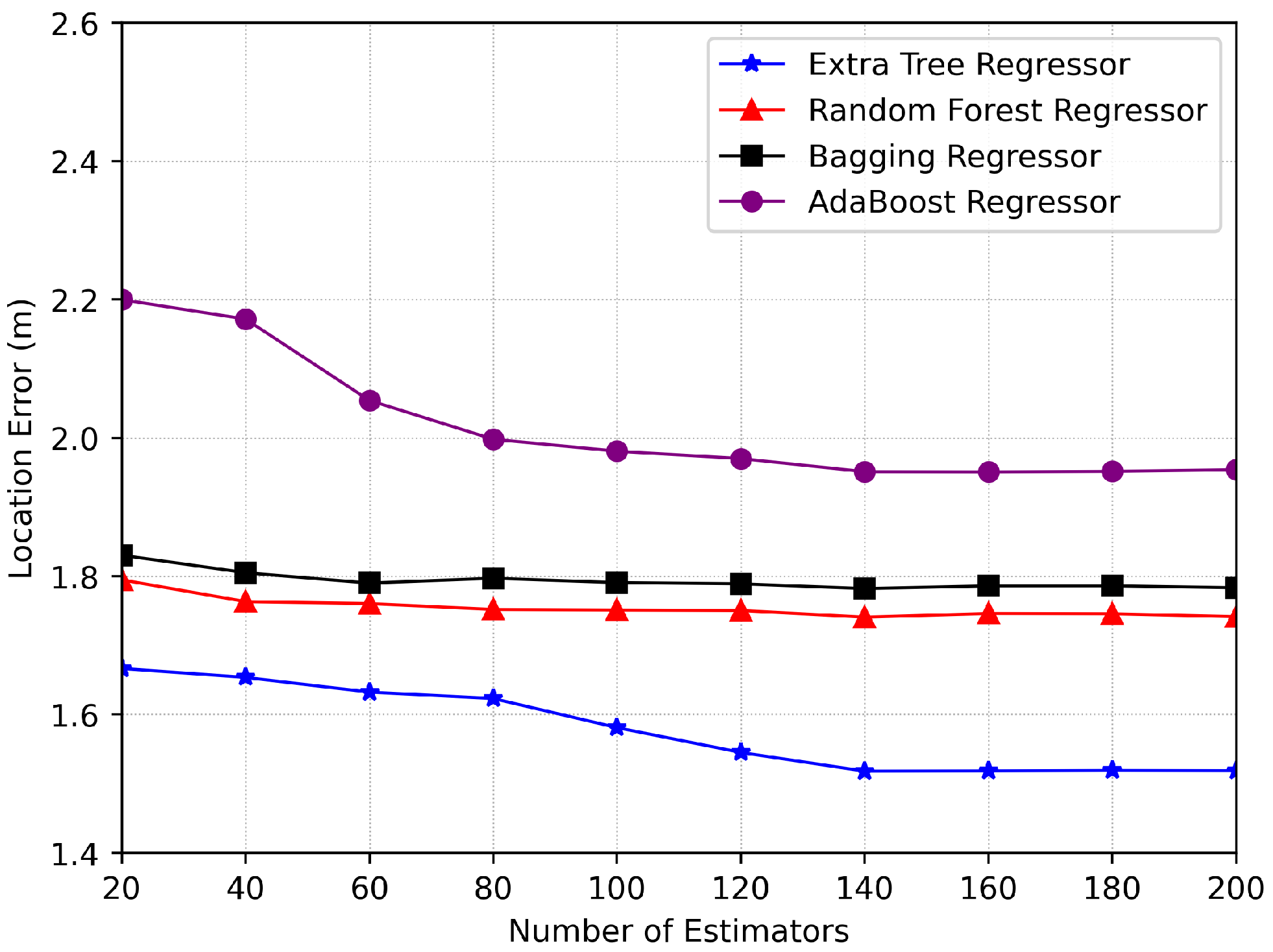
In Figure 9, we consider the number of estimators for various regression models versus location error for hyperparameter tuning using single AP data. For our model, we selected 140 estimators, as beyond this point, the error level stabilizes, indicating that this is the optimal number for our system model using the Extra Tree Regressor. Comparatively, the Extra Tree Regressor outperforms the other regressor models, providing the most accurate results for our system model.
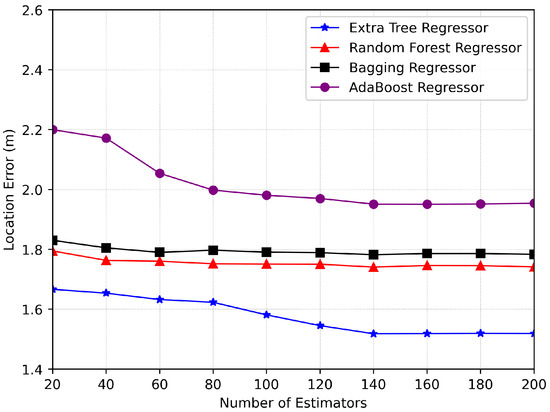
Figure 9.
Error Evaluation for localization considering single AP (estimators vs. location error).
6.3. Computational Complexity Analysis
This subsection analyzes the computational complexity of the proposed approach based on the Extra Trees Regressor (ETR) and compares it with the random forest regressor and bagging regressor systems. The analysis considers the influence of factors such as the number of regression trees, the number of features, the number of samples, and the maximum tree depth on the computational complexity of the proposed ETR. Specifically, the complexity of ETR can be approximated by , where T represents the number of trees, F is the number of features, S is the number of training samples, and is the maximum depth of the trees. In our simulations, we assumed and the maximum tree depth to be when selecting the optimal split.
The computational complexity of the random forest regressor follows a similar pattern, represented by [46]. However, ETR is computationally faster than the random forest regressor because it utilizes a random threshold rather than searching for the optimal threshold to split the data at each node. For the Bagging Regressor, the computational complexity is provided by [46], where is the total number of base regressors and represents the computational complexity of training a base regressor. In our simulations, we used the decision tree regressor as the base estimator, which has a complexity of .
6.4. Graphical Results of REM Construction
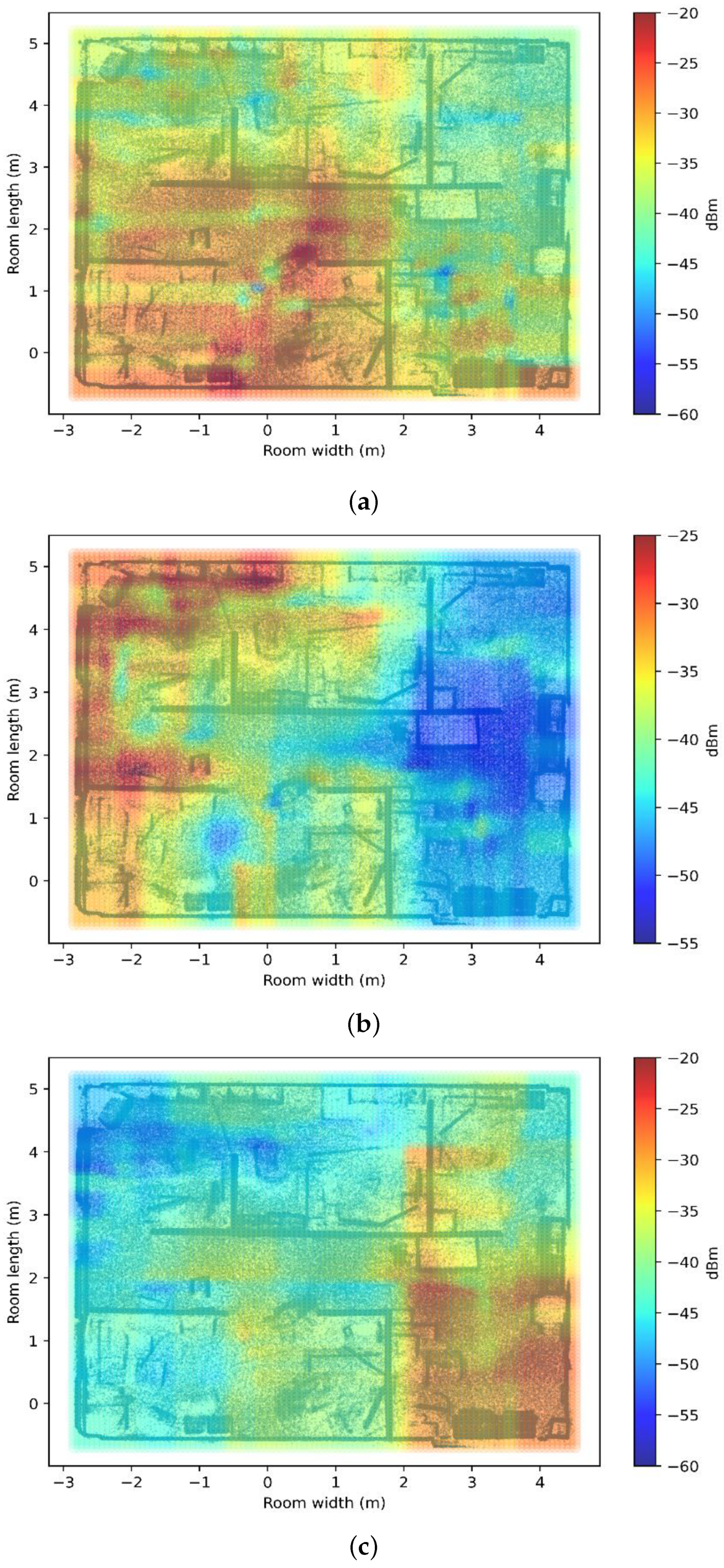
In this section, we present several graphs illustrating the Radio Environment Map (REM) generated for our study in Figure 10. The REM was constructed considering a total of three access points. Each map was developed using the Extra Trees Regressor, a machine-learning algorithm known for its superior performance in comparison with other regression techniques. The use of the Extra Trees Regressor allowed for high accuracy and reliability in mapping the radio environment, thereby providing a robust foundation for the subsequent localization analysis.
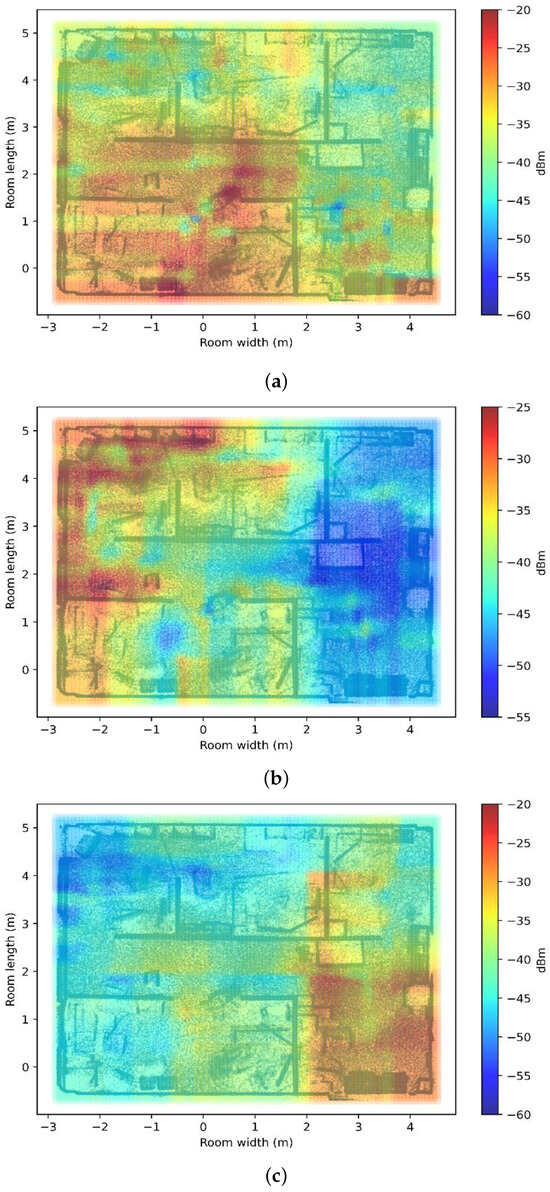
Figure 10.
REM Visualization for Different AP Placements (a) AP-1 (b) AP-2 (c) AP-3.
7. Conclusions
Our research into indoor localization through radio environment maps demonstrated significant advancements in accuracy and robustness by increasing the number of access points. Initially, using a single access point established a basic understanding of the system’s capabilities, setting a baseline for localization accuracy and enabling the generation of synthetic data to explore minimal conditions. Subsequent enhancements were evident when a second access point was introduced, which improved the system’s ability to handle signal complexities such as fading and interference. This multi-access-point setup substantially refined our REM and allowed for more precise signal triangulation, thus improving the accuracy of the predictions. Our findings confirm that the density of access points is crucial for enhancing the performance of REM-based indoor localization systems. The direct correlation between the number of access points and localization accuracy underscores the potential for scalable solutions in commercial or industrial settings, where precise navigation is essential. This study provides avenues for future research in the field, suggesting that further increases in access point density could continue to improve localization accuracy and system resilience in even larger or more challenging spaces.
8. Future Work
Future research on indoor localization systems can be expanded in several directions. Applying the proposed methodology to diverse environments like industrial warehouses, large commercial spaces, and residential buildings could necessitate specialized strategies due to unique signal propagation and access point placement challenges. Enhancing data collection with advanced sensing technologies such as ultra-wideband systems and visual data could provide richer datasets for more accurate and reliable localization. Additionally, exploring alternative machine learning models, including deep learning techniques and reinforcement learning, could potentially improve the localization performance and adaptability. These advancements aim to enhance the accuracy, reliability, and versatility of indoor localization systems across various environments and applications.
Author Contributions
Conceptualization, T.A. and K.I.; methodology, T.A.; software, T.A.; validation, T.A. and K.I.; formal analysis, T.A.; investigation, T.A.; resources, T.A. and K.I.; data curation, T.A.; writing—original draft, T.A.; writing—review and editing, T.A. and K.I.; visualization, T.A.; supervision, K.I.; project administration, K.I.; funding acquisition, K.I. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Regional Innovation Strategy (RIS) through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (MOE) under Grant 2021RIS-003.
Data Availability Statement
The data presented in this study are available upon request from the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Menegotto, J.L. Hybrid Indoor Location Infrastructure based on BLE beacons, BLE Lighting Devices and Music Combination. Int. J. Eng. Res. Technol. 2017, 6, 56–64. [Google Scholar]
- de Blasio, G.S.; Rodríguez-Rodríguez, J.C.; García, C.R.; Quesada-Arencibia, A. Beacon-related parameters of bluetooth low energy: Development of a semi-automatic system to study their impact on indoor positioning systems. Sensors 2019, 19, 3087. [Google Scholar] [CrossRef]
- Yoon, S.; Lee, K.; Yun, Y.; Rhee, I. ACMI: FM-based indoor localization via autonomous fingerprinting. IEEE Trans. Mob. Comput. 2015, 15, 1318–1332. [Google Scholar]
- Ivanov, A.; Muhammad, B.; Tonchev, K.; Mihovska, A.; Poulkov, V. Uav-based volumetric measurements toward radio environment map construction and analysis. Sensors 2022, 22, 9705. [Google Scholar] [CrossRef]
- Khan, S.U.; García, C.E.; Hwang, T.; Koo, I. Radio Environment Map Construction Based on Privacy-Centric Federated Learning. IEEE Access 2024, 12, 28109–28121. [Google Scholar]
- Elghazaly, G.; Frank, R.; Harvey, S.; Safko, S. High-definition maps: Comprehensive survey, challenges and future perspectives. IEEE Open J. Intell. Transp. Syst. 2023, 4, 527–550. [Google Scholar]
- Aziz, T.; Camana, M.R.; Garcia, C.E.; Hwang, T.; Koo, I. REM-Based Indoor Localization with an Extra-Trees Regressor. Electronics 2023, 12, 4350. [Google Scholar] [CrossRef]
- Giuliano, R.; Cardarilli, G.C.; Cesarini, C.; Di Nunzio, L.; Fallucchi, F.; Fazzolari, R.; Mazzenga, F.; Re, M.; Vizzarri, A. Indoor localization system based on bluetooth low energy for museum applications. Electronics 2020, 9, 1055. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Vinicchayakul, W.; Promwong, S. Improvement of fingerprinting technique for UWB indoor localization. In Proceedings of the 4th Joint International Conference on Information and Communication Technology, Electronic and Electrical Engineering (JICTEE), Chiang Rai, Thailand, 5–8 March 2014; pp. 1–5. [Google Scholar]
- Liu, C.; Ma, Q.; Luo, Z.J.; Hong, Q.R.; Xiao, Q.; Zhang, H.C.; Miao, L.; Yu, W.M.; Cheng, Q.; Li, L.; et al. A programmable diffractive deep neural network based on a digital-coding metasurface array. Nat. Electron. 2022, 5, 113–122. [Google Scholar]
- Gao, X.; Ma, Q.; Gu, Z.; Cui, W.Y.; Liu, C.; Zhang, J.; Cui, T.J. Programmable surface plasmonic neural networks for microwave detection and processing. Nat. Electron. 2023, 6, 319–328. [Google Scholar]
- Di Renzo, M.; Zappone, A.; Debbah, M.; Alouini, M.S.; Yuen, C.; de Rosny, J.; Tretyakov, S. Smart Radio Environments Empowered by Reconfigurable Intelligent Surfaces: How It Works, State of Research, and The Road Ahead. IEEE J. Sel. Areas Commun. 2020, 38, 2450–2525. [Google Scholar] [CrossRef]
- Qureshi, H.N.; Masood, U.; Manalastas, M.; Zaidi, S.M.A.; Farooq, H.; Forgeat, J.; Bouton, M.; Bothe, S.; Karlsson, P.; Rizwan, A.; et al. Towards addressing training data scarcity challenge in emerging radio access networks: A survey and framework. IEEE Commun. Surv. Tutor. 2023, 25, 1954–1990. [Google Scholar]
- Serôdio, C.; Cunha, J.; Candela, G.; Rodriguez, S.; Sousa, X.R.; Branco, F. The 6G Ecosystem as Support for IoE and Private Networks: Vision, Requirements, and Challenges. Future Internet 2023, 15, 348. [Google Scholar] [CrossRef]
- Leitch, S.G.; Ahmed, Q.Z.; Abbas, W.B.; Hafeez, M.; Laziridis, P.I.; Sureephong, P.; Alade, T. On indoor localization using wifi, ble, uwb, and imu technologies. Sensors 2023, 23, 8598. [Google Scholar] [CrossRef]
- Nguyen, H.A.; Nguyen, V.K.; Witrisal, K. Amplitude modeling of specular multipath components for robust indoor localization. Sensors 2022, 22, 462. [Google Scholar] [CrossRef]
- Nattke, M.; Rotta, R.; Natarov, R.; Archila, O.; Mykytyn, P. Precise sensors for localization in the drone swarm. In Proceedings of the iCCC2024—iCampus Cottbus Conference 2024, Cottbus, Germany, 15–16 May 2024. [Google Scholar]
- Li, X.; Wang, H.; Chen, Z.; Jiang, Z.; Luo, J. UWB-Fi: Pushing Wi-Fi towards Ultra-wideband for Fine-Granularity Sensing. In Proceedings of the 22nd Annual International Conference on Mobile Systems, Applications and Services, Tokyo, Japan, 3–7 June 2024; pp. 42–55. [Google Scholar]
- Qi, L.; Liu, Y.; Gao, C.; Feng, T.; Yu, Y. Hybrid pedestrian positioning system using wearable inertial sensors and ultrasonic ranging. Def. Technol. 2024, 33, 327–338. [Google Scholar]
- Xu, Z.; Song, Y.; Jin, T. A Synchronous Compensation Method for Radar Localization and Refraction Effect Based on Echo History. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5203311. [Google Scholar] [CrossRef]
- Gavrilovska, L.M.; Atanasovski, V.M. Dynamic REM towards flexible spectrum management. In Proceedings of the 2013 11th International Conference on Telecommunications in Modern Satellite, Cable and Broadcasting Services (TELSIKS), Nis, Serbia, 16–19 October 2013; Volume 1, pp. 287–296. [Google Scholar] [CrossRef]
- Furqan, H.M.; Solaija, M.S.J.; Türkmen, H.; Arslan, H. Wireless communication, sensing, and REM: A security perspective. IEEE Open J. Commun. Soc. 2021, 2, 287–321. [Google Scholar]
- Afridi, A.; Hameed, I.; García, C.E.; Koo, I. Throughput Maximization of Wireless Powered IoT Network with Hybrid NOMA-TDMA Scheme: A Genetic Algorithm Approach. IEEE Access 2024, 12, 65241–65253. [Google Scholar]
- Deepika, K.; Usha, J. Implementation of personnel localization & automation network (PLAN) using internet of things (IoT). Procedia Comput. Sci. 2020, 171, 868–877. [Google Scholar]
- Kanakaraja, P. IoT enabled BLE and LoRa based indoor localization without GPS. Turk. J. Comput. Math. Educ. 2021, 12, 1637–1651. [Google Scholar]
- Gengatharen, D.E.; Standing, C. Evaluating the benefits of regional electronic marketplaces: Assessing the quality of the REM success model. Electron. J. Inf. Syst. Eval. 2004, 7, 11–20. [Google Scholar]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar]
- Girgensohn, A.; Patel, M.; Biehl, J.T. Radio-frequency-based indoor-localization techniques for enhancing Internet-of-Things applications. Pers. Ubiquitous Comput. 2024, 28, 385–401. [Google Scholar]
- Yu, T.; Ren, W.; Nahrstedt, K. MMLOC: Multi-mode indoor localization system based on smart access points. In Proceedings of the 16th EAI International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services, Houston, TX, USA, 12–14 November 2019; pp. 473–482. [Google Scholar]
- Palacios, J.; Bielsa, G.; Casari, P.; Widmer, J. Single-and multiple-access point indoor localization for millimeter-wave networks. IEEE Trans. Wirel. Commun. 2019, 18, 1927–1942. [Google Scholar]
- Labinghisa, B.; Park, G.S.; Lee, D.M. Improved indoor localization system based on virtual access points in a Wi-Fi environment by filtering schemes. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–7. [Google Scholar]
- Zhang, G.; Zhang, D.; He, Y.; Chen, J.; Zhou, F.; Chen, Y. Multi-person passive wifi indoor localization with intelligent reflecting surface. IEEE Trans. Wirel. Commun. 2023, 22, 6534–6546. [Google Scholar]
- Han, S.; Li, Y.; Meng, W.; He, C. A new high precise indoor localization approach using single access point. In Proceedings of the GLOBECOM 2017–2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–5. [Google Scholar]
- Vy, T.D.; Nguyen, T.L.; Shin, Y. A smartphone indoor localization using inertial sensors and single Wi-Fi access point. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–7. [Google Scholar]
- Jiang, P.; Zhang, Y.; Fu, W.; Liu, H.; Su, X. Indoor mobile localization based on Wi-Fi fingerprint’s important access point. Int. J. Distrib. Sens. Netw. 2015, 11, 429104. [Google Scholar]
- Zhou, M.; Li, Y.; Tahir, M.J.; Geng, X.; Wang, Y.; He, W. Integrated statistical test of signal distributions and access point contributions for Wi-Fi indoor localization. IEEE Trans. Veh. Technol. 2021, 70, 5057–5070. [Google Scholar]
- Camana, M.R.; Garcia, C.E.; Hwang, T.; Koo, I. A REM update methodology based on clustering and random forest. Appl. Sci. 2023, 13, 5362. [Google Scholar] [CrossRef]
- Ullah, I.; Qian, S.; Deng, Z.; Lee, J.H. Extended Kalman filter-based localization algorithm by edge computing in wireless sensor networks. Digit. Commun. Netw. 2021, 7, 187–195. [Google Scholar]
- Ullah, I.; Adhikari, D.; Khan, H.; Anwar, M.S.; Ahmad, S.; Bai, X. Mobile robot localization: Current challenges and future prospective. Comput. Sci. Rev. 2024, 53, 100651. [Google Scholar]
- Jia, M.; Khattak, S.B.A.; Guo, Q.; Gu, X.; Lin, Y. Access point optimization for reliable indoor localization systems. IEEE Trans. Reliab. 2019, 69, 1424–1436. [Google Scholar]
- Arslan, R.; Ulutaş, H.; Köksal, A.; Bakir, M.; Çiftçi, B. Tree-Based Machine Learning Techniques for Automated Human Sleep Stage Classification. Trait. Signal 2023, 40, 1385–1400. [Google Scholar]
- García, C.E.; Koo, I. Extremely randomized trees regressor scheme for mobile network coverage prediction and REM construction. IEEE Access 2023, 11, 65170–65180. [Google Scholar]
- Kadiyala, A.; Kumar, A. Applications of python to evaluate the performance of bagging methods. Environ. Prog. Sustain. Energy 2018, 37, 1555–1559. [Google Scholar]
- Grözinger, M.; Röschke, J.; Klöppel, B. Automatic recognition of rapid eye movement (REM) sleep by artificial neural networks. J. Sleep Res. 1995, 4, 86–91. [Google Scholar]
- Abdar, M.; Acharya, U.R.; Sarrafzadegan, N.; Makarenkov, V. NE-nu-SVC: A new nested ensemble clinical decision support system for effective diagnosis of coronary artery disease. IEEE Access 2019, 7, 167605–167620. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).