Online Mechanical Resonance Frequency Identification Method Based on an Improved Second-Order Generalized Integrator—Frequency-Locked Loop


Abstract
:1. Introduction
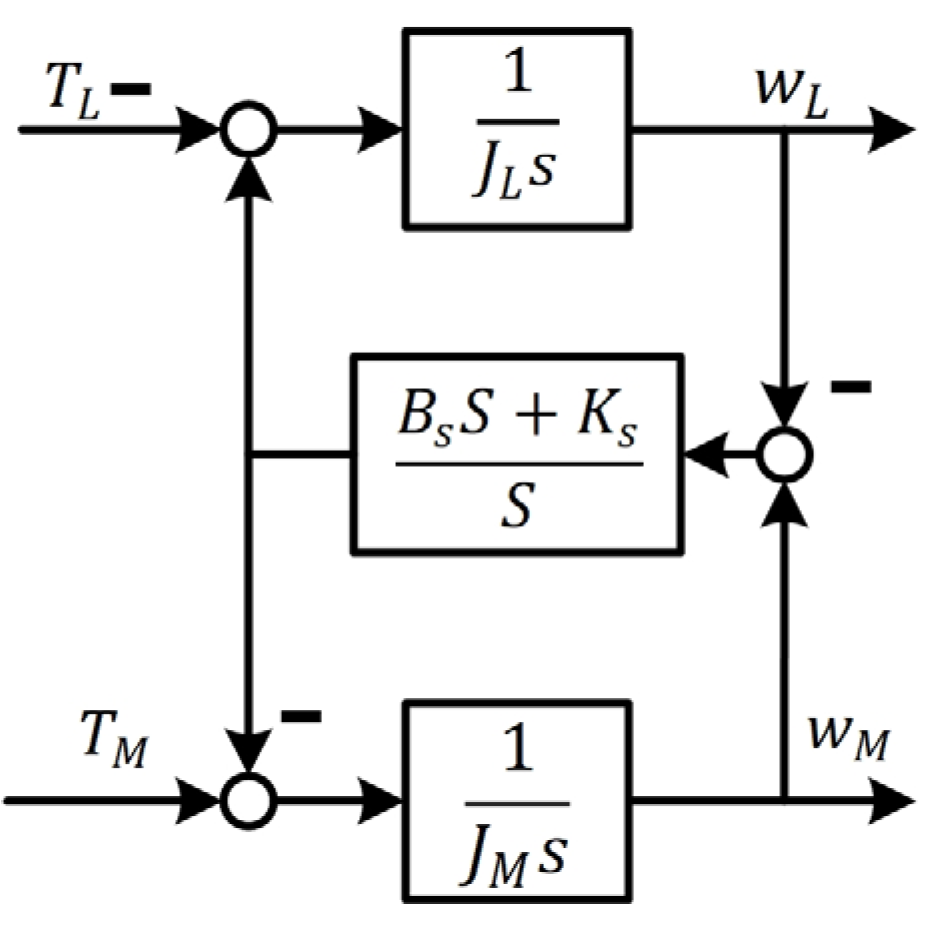
2. Mechanism of Mechanical Resonance
3. Principle of LPF-CSOGI-FLL
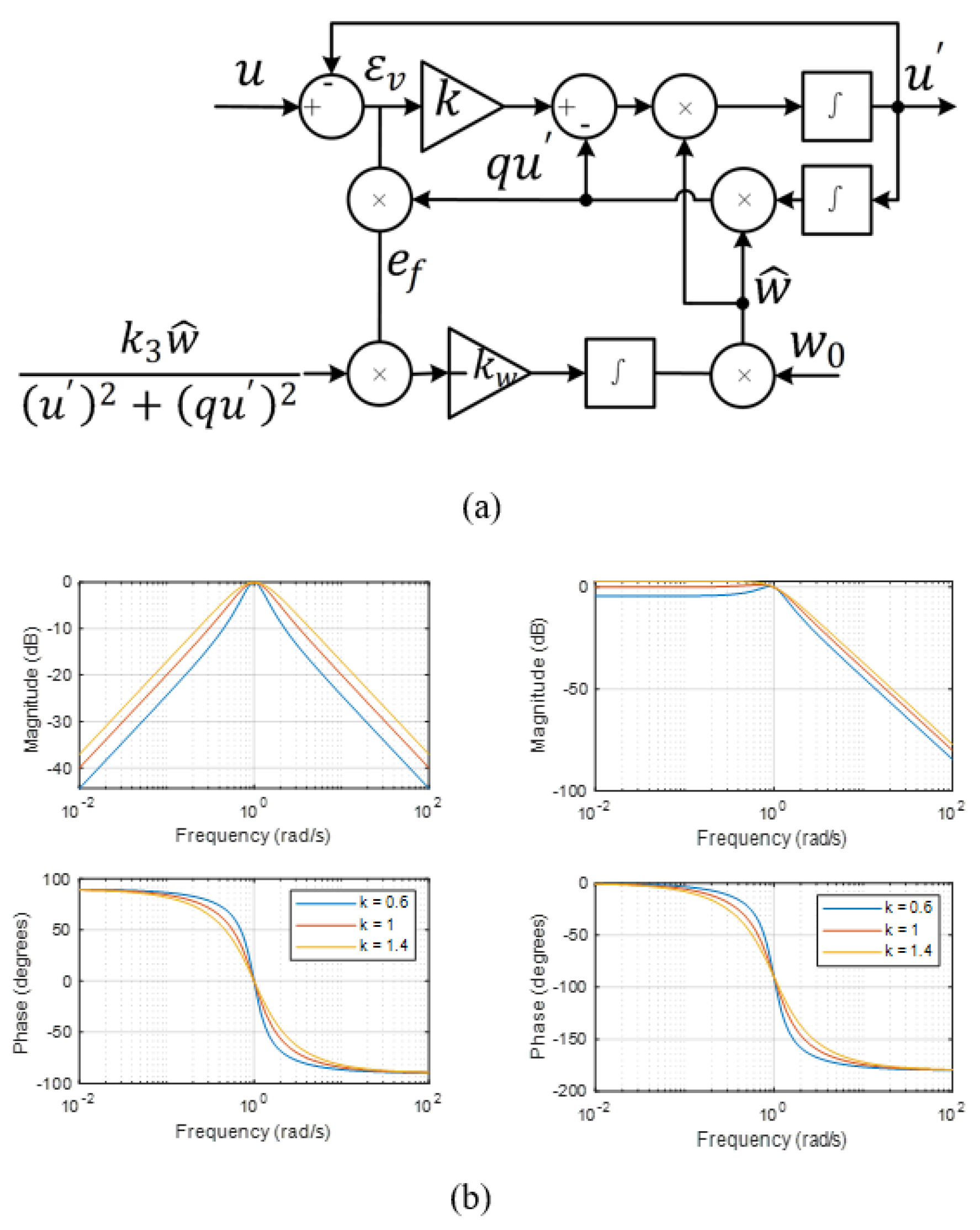
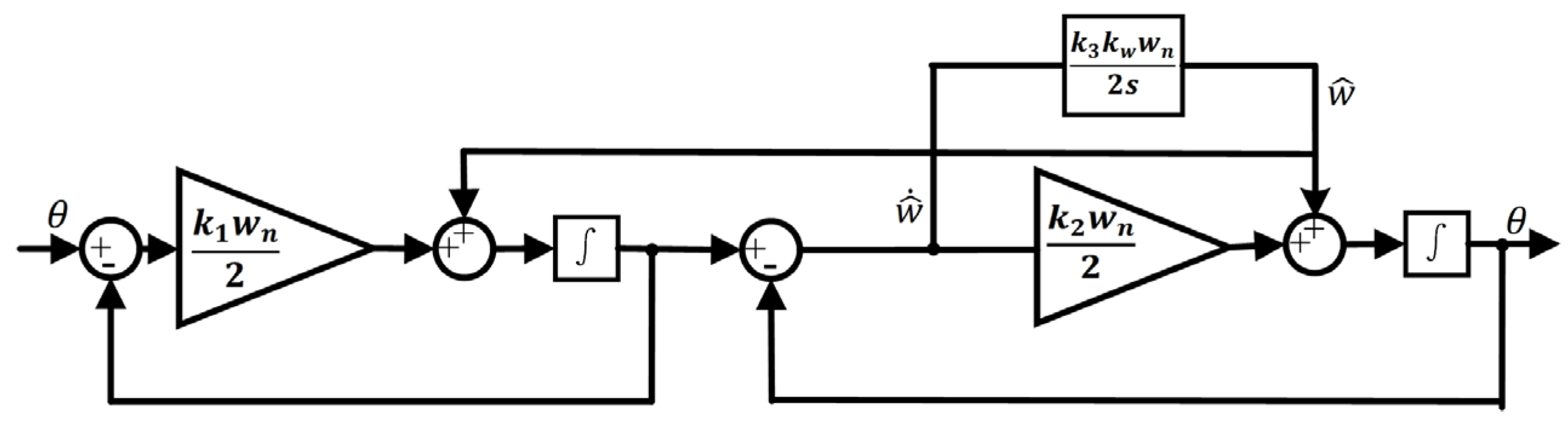
3.1. Traditional SOGI-FLL
- Lower gain values enhance the filtering effect, while higher gain values improve the system’s response speed and bandwidth range. However, high gain values may reduce the precision of extracting specific frequency signals, thereby affecting the overall system performance.
- From the input to the output perspective, the band-pass filtering characteristics exhibited by can effectively suppress DC components and low-frequency signals to a certain extent. However, since exhibits low-pass filtering characteristics, the presence of DC or low-frequency components in the input signal may adversely affect the output quadrature signal and frequency-locking performance. In such cases, the DC component can influence the frequency estimation of the SOGI-FLL, further affecting the overall system performance [21].
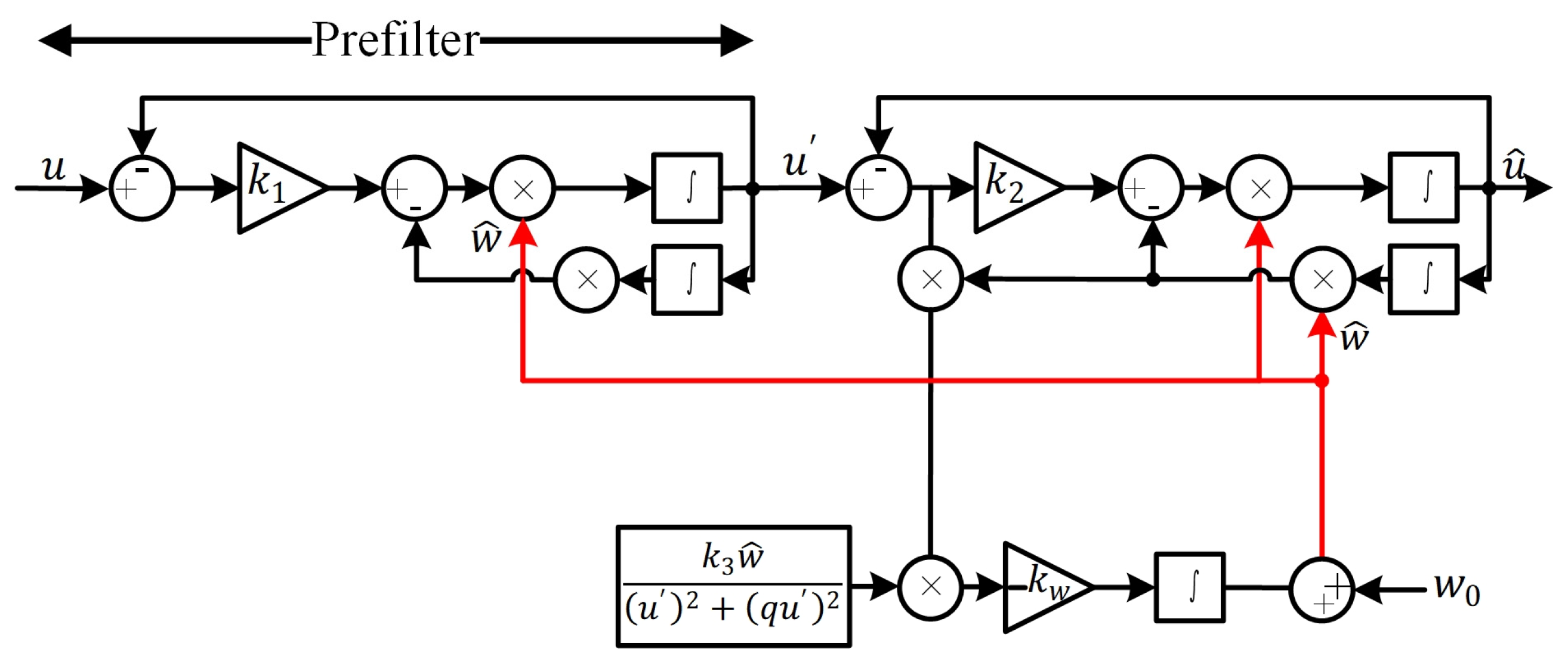
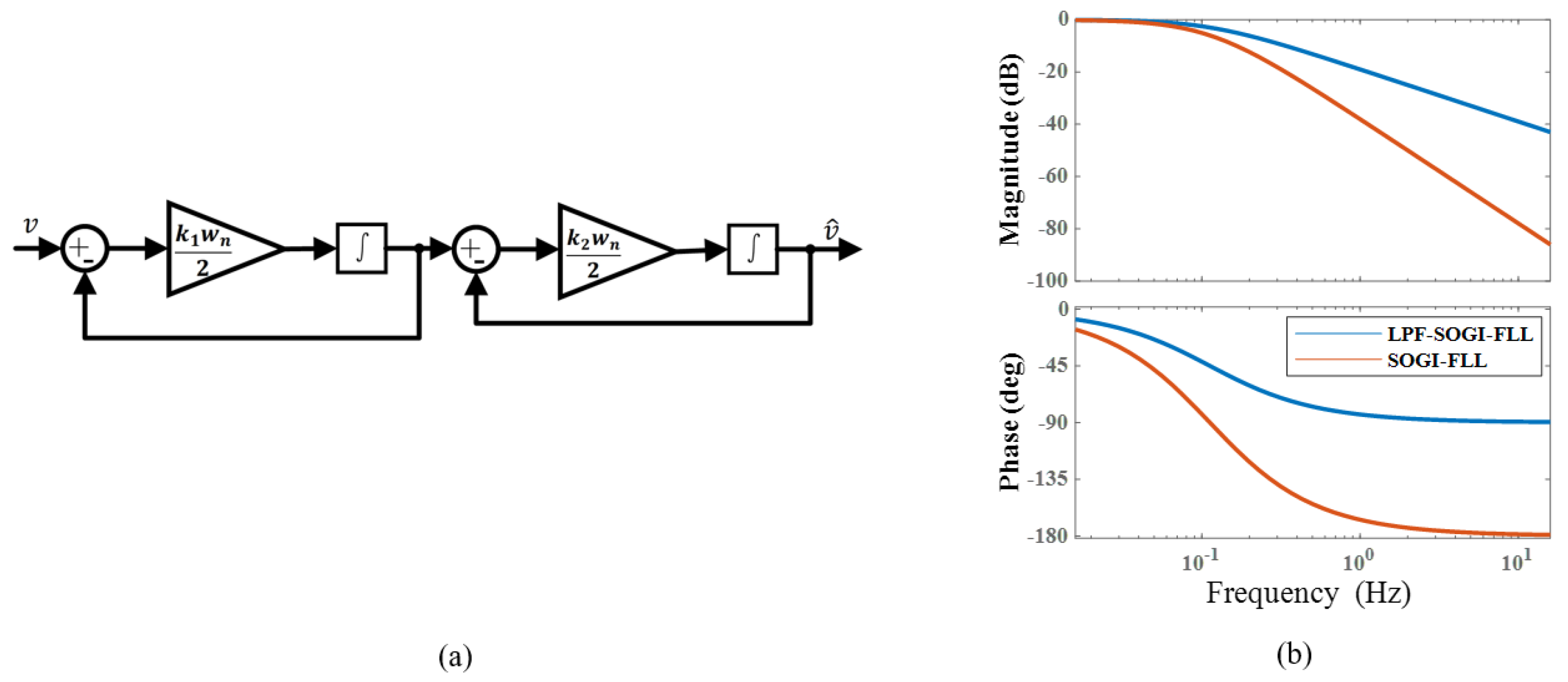
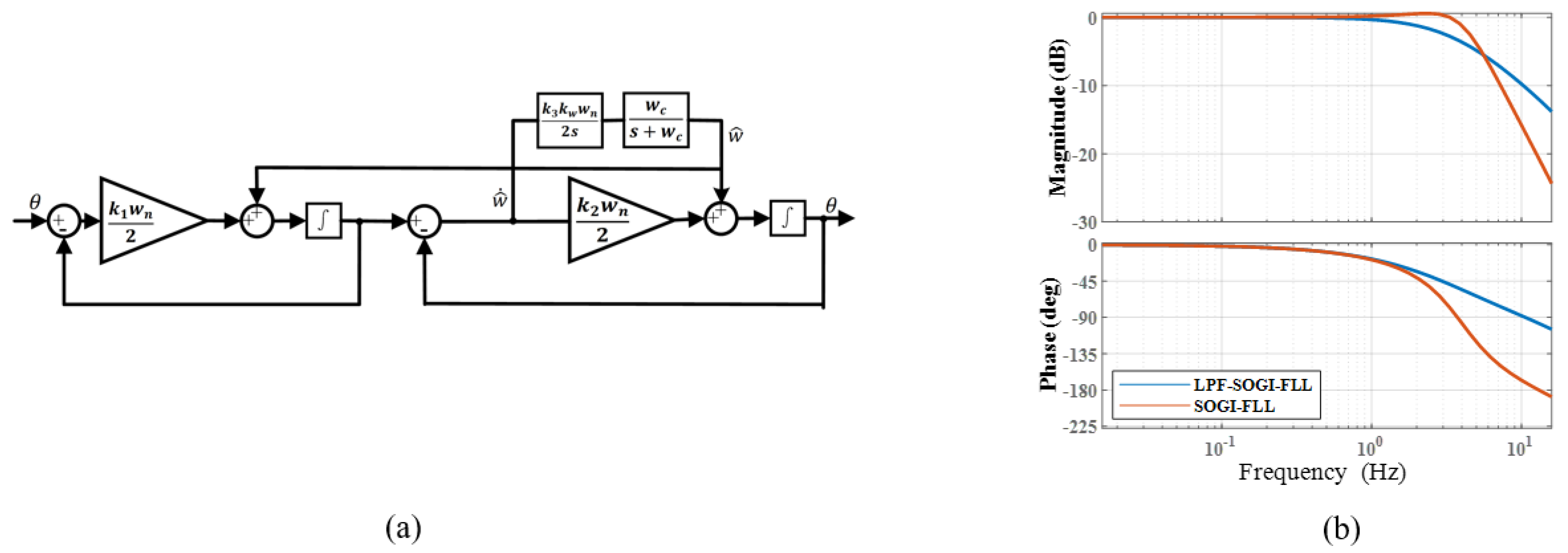
3.2. Low-Pass Filter-Cascaded Second-Order Generalized Integrator—Frequency-Locked Loop
4. Experimental Verification
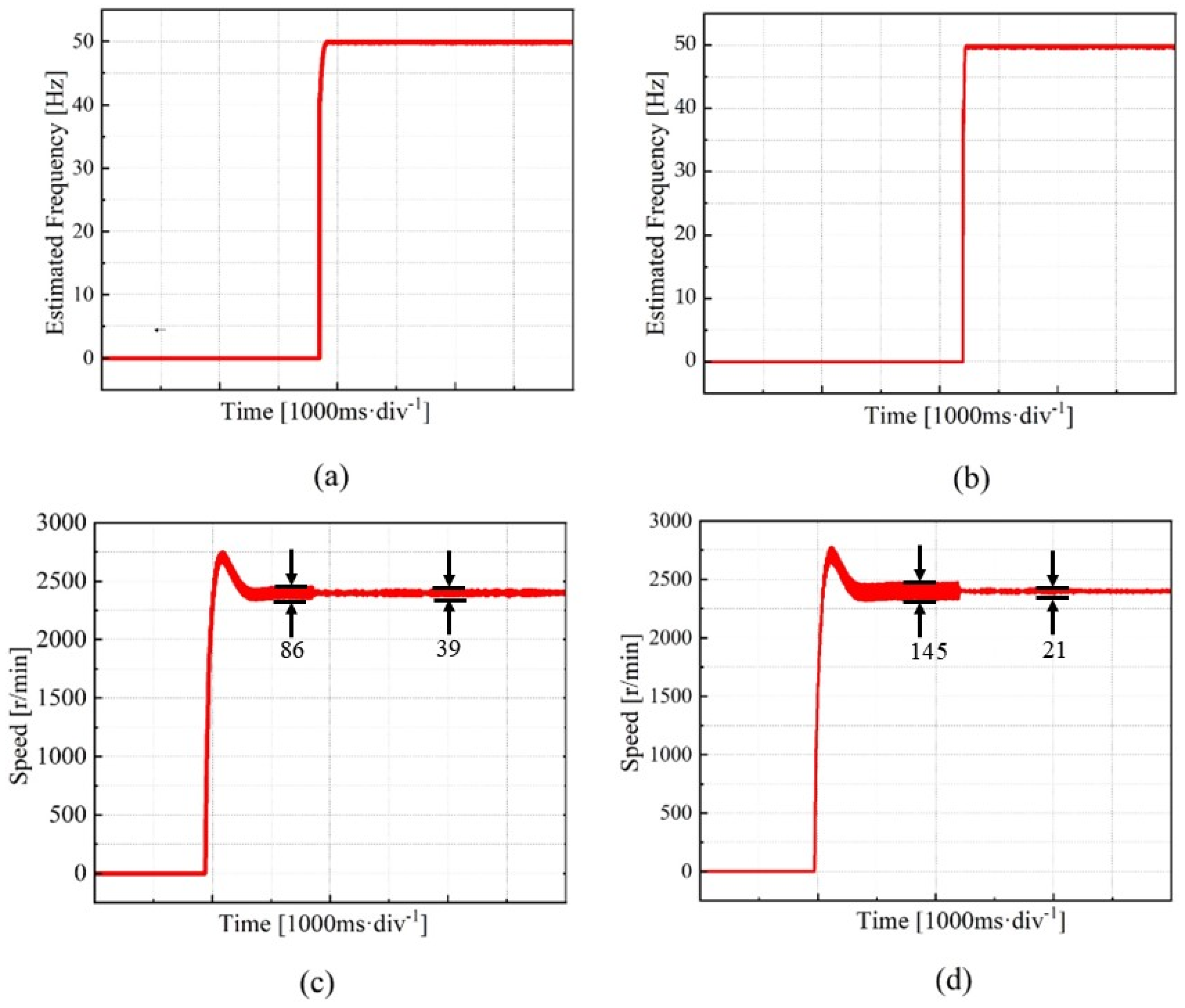
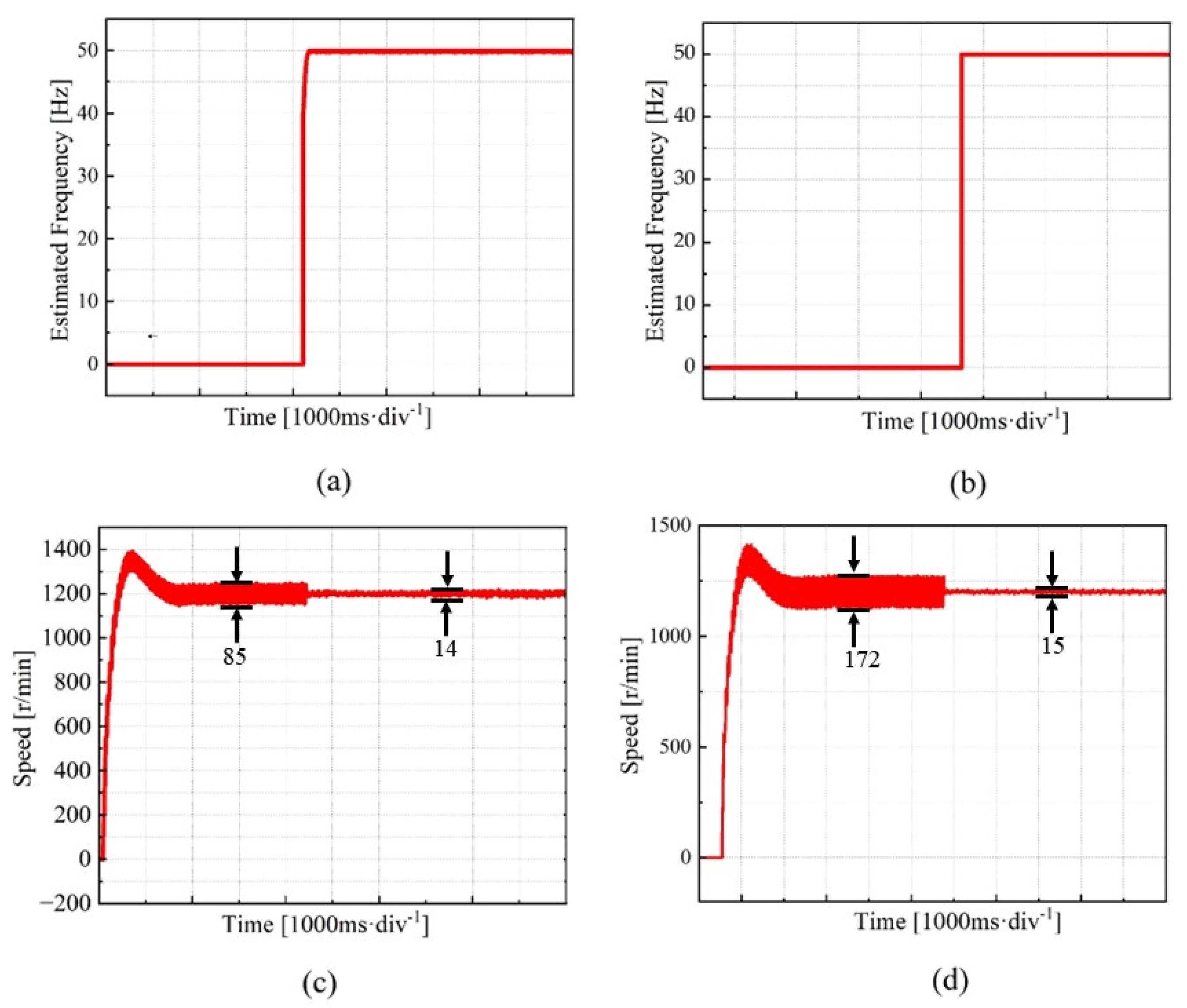
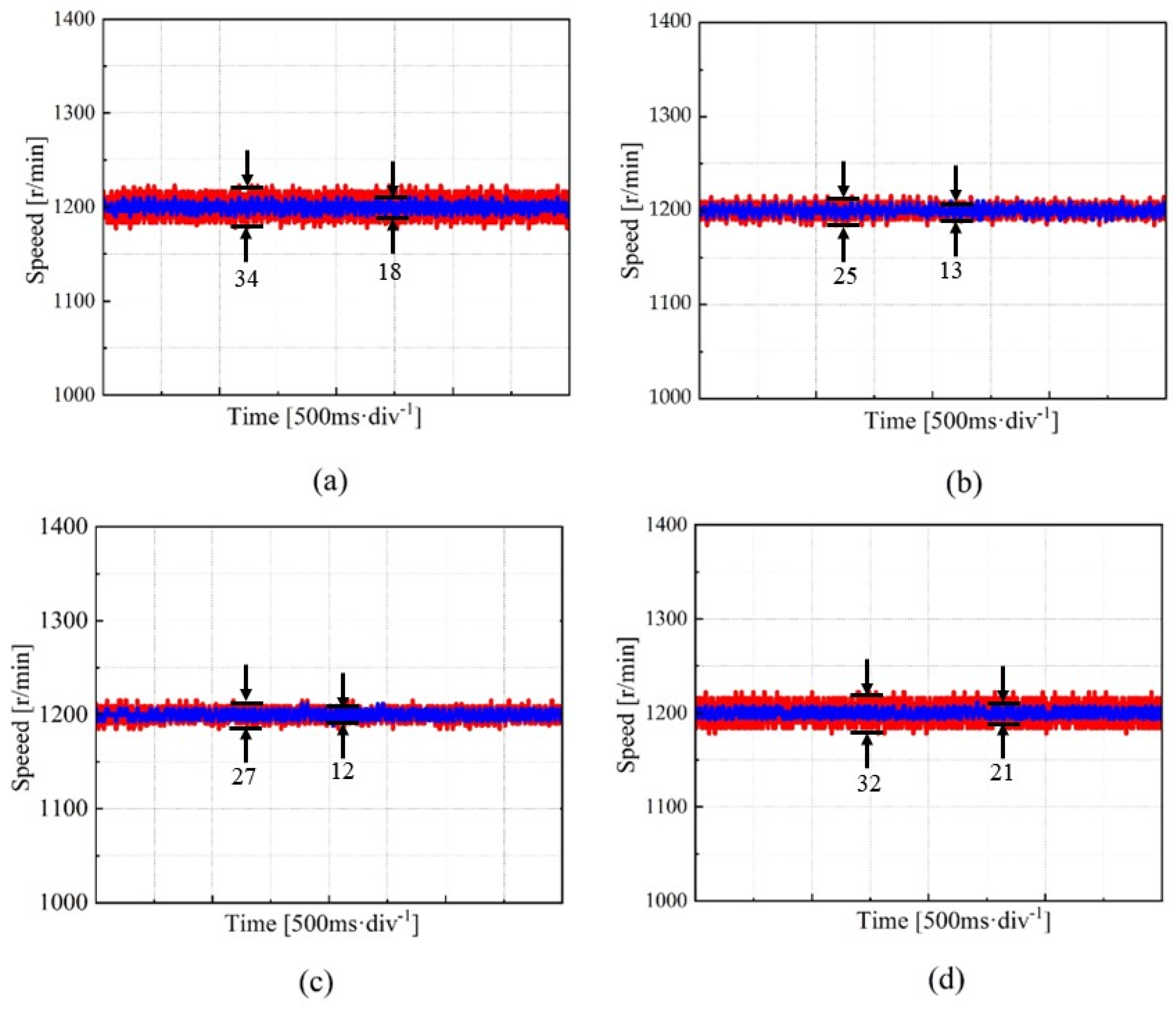
4.1. Analysis of Motor Stability Performance with the Introduction of LPF-CSOGI-FLL
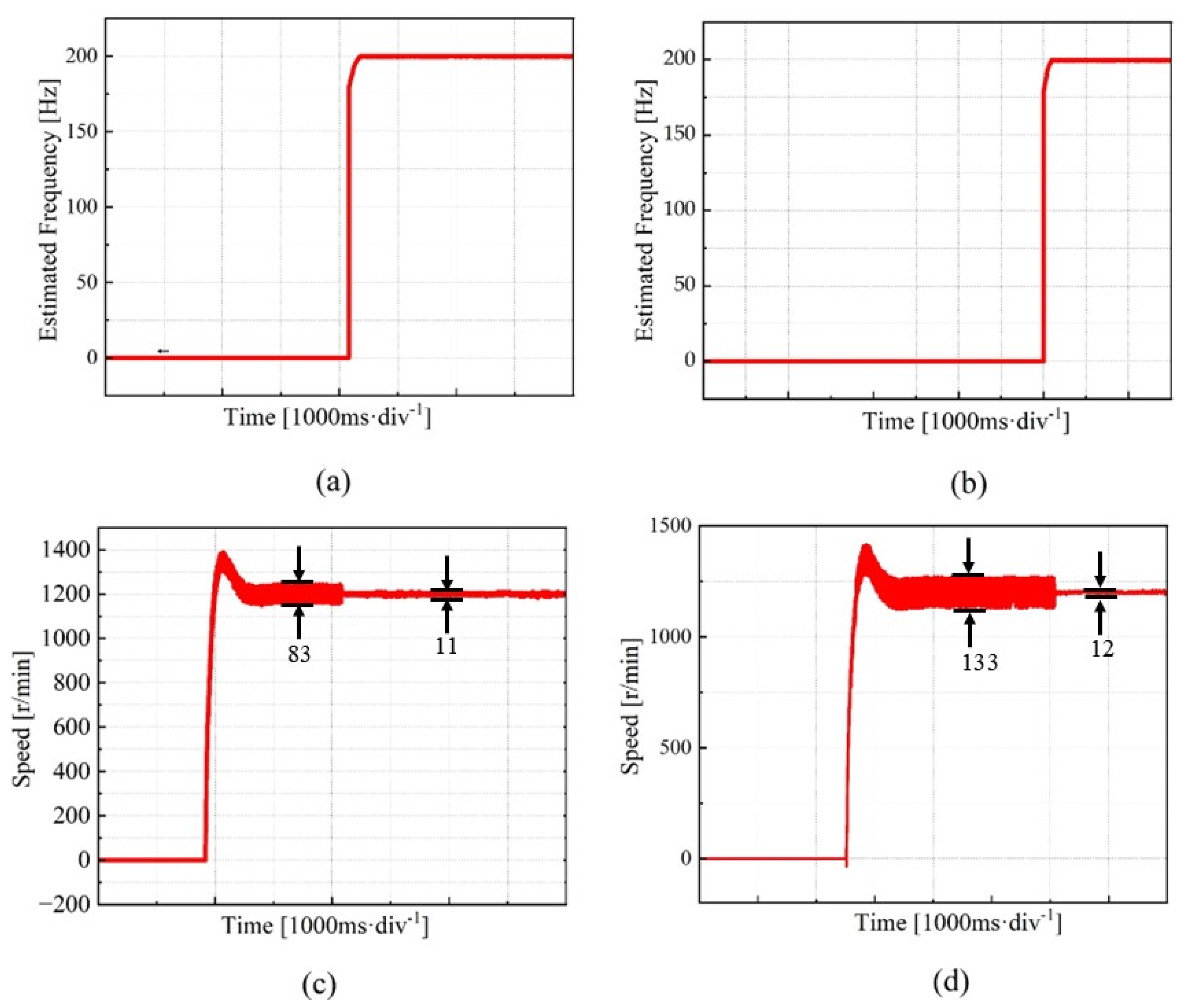
4.2. Comparison of Online and Offline Identification Performance under Mechanical Resonance Frequency Drift
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Padmanabhan, J.B.; Anbazhagan, G. A comprehensive review of hybrid renewable energy charging system to optimally drive permanent magnet synchronous motors in electric vehicle. Energy Sources Part A Recovery Util. Environ. Eff. 2024, 46, 3499–3521. [Google Scholar] [CrossRef]
- Pavkovic, D.; Cipek, M.; Krznar, M.; Staroveski, T.; Klaic, M.; Brezak, D. Single-step auto-tuning of external active damping control strategy for a drill-string speed-controlled electrical drive. Optim. Eng. 2024, 25, 171–197. [Google Scholar] [CrossRef]
- Yang, H.; Li, X.; Xu, J.; Shang, D.; Qu, X. Control Method for Flexible Joints in Manipulator Based on BP Neural Network Tuning PI Controller. Mathematics 2021, 9, 3146. [Google Scholar] [CrossRef]
- Li, Q.; Fang, Y.-m.; Li, J.-x.; Zhang, W.-j. Feedforward and Feedback Compound Control of Vibration Displacement for a Continuous Casting Mold Driven by a Servo Motor. Int. J. Control Autom. Syst. 2020, 18, 3218–3228. [Google Scholar] [CrossRef]
- Shi, Y.; Li, C.; Huang, Y. Resonance Suppression of a Controllable Mechanism Welding Robot End with Central Composite Design Methodology. Appl. Sci. 2022, 12, 6352. [Google Scholar] [CrossRef]
- Peng, J.; Zhang, Y.; Li, S.; Bao, W.; Tanaka, Y. Identification Algorithm and Improvement of Modal Damping Ratios for Armature Assembly in a Hydraulic Servo-Valve with Magnetic Fluid. Energies 2023, 16, 3419. [Google Scholar] [CrossRef]
- El Yaakoubi, A.; Bouzem, A.; El Alami, R.; Chaibi, N.; Bendaou, O. Wind turbines dynamics loads alleviation: Overview of the active controls and the corresponding strategies. Ocean Eng. 2023, 278, 114070. [Google Scholar] [CrossRef]
- Li, W.; Liu, Y.; Ge, S.; Liao, D. Research of Mechanical Resonance Analysis and Suppression Control Method of the Servo Drive System. Shock Vib. 2021, 2021, 5627734. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, Y.; Yang, S.; Liao, Y.; Chen, Z. Analysis on new semi-active control strategies to reduce lateral vibrations of high-speed trains by simulation and hardware-in-the-loop testing. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2022, 236, 960–972. [Google Scholar] [CrossRef]
- Stanikzai, M.H.; Elias, S.; Chae, Y. Recent Advances in Hybrid Vibration-Control Systems. Pract. Period. Struct. Des. Constr. 2022, 27, 03122003. [Google Scholar] [CrossRef]
- Chen, G.; Liu, S.; Tang, Z.; Xu, J.; Wang, W. A novel method of multiple adaptive notch filtering for flexible missile vibration suppression. Aircr. Eng. Aerosp. Technol. 2020, 92, 1149–1157. [Google Scholar] [CrossRef]
- Zheng, L.; Guan, Q.; Wang, X.; Su, Y.; Wu, Y.; Hu, H. A Robust Adaptive Notch Filter for Mechanical Resonance Suppression in Two-Mass Servo Systems. Available at SSRN 4845702. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4845702 (accessed on 1 March 2024).
- Shi, W.; Liu, K.; Wei, J. Resonance Suppression of a Maglev Inertially Stabilized Platform Based on an Improved Recursive Least Square Algorithm. Appl. Sci. 2022, 12, 3362. [Google Scholar] [CrossRef]
- Golla, M.; Thangavel, S.; Chandrasekaran, K.; Simon, S.P. Real-Time Implementation of PV fed Universal Active Power Filter Using CF-SOGI based IPBT Control Scheme. Electr. Power Syst. Res. 2022, 206, 107779. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C.; Abusorrah, A.M.; Al-Turki, Y. Modeling, Tuning, and Performance Comparison of Second-Order-Generalized-Integrator-Based FLLs. IEEE Trans. Power Electron. 2018, 33, 10229–10239. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C.; Abusorrah, A.M.; Al-Turki, Y. Standard SOGI-FLL and Its Close Variants: Precise Modeling in LTP Framework and Determining Stability Region/Robustness Metrics. IEEE Trans. Power Electron. 2021, 36, 409–422. [Google Scholar] [CrossRef]
- Lyu, S.; Zheng, L.; Song, J. A Second-Order Generalized Integrator Frequency Locked Loop With Damping Ratio Adaptation. Ieee Trans. Power Electron. 2022, 37, 2694–2704. [Google Scholar] [CrossRef]
- Pan, L.; Li, Z.; Zhang, J.; Pang, Y. Frequency-Locked Loop Based on Active Noise Cancellation Syncretized Two First-Order Low Pass Filters. IEEE Access 2022, 10, 7277–7288. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Lee, D.-C. Sensorless Control of Variable-Speed SCIG Wind Energy Conversion Systems Based on Rotor Flux Estimation Using ROGI-FLL. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 7786–7796. [Google Scholar] [CrossRef]
- Guo, M.; Wu, Z.; Qin, H. Harmonics Reduction for Resolver-to-Digital Conversion via Second-Order Generalized Integrator With Frequency-Locked Loop. IEEE Sens. J. 2021, 21, 8209–8217. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Gharehpetian, G.B. Five Approaches to Deal With Problem of DC Offset in Phase-Locked Loop Algorithms: Design Considerations and Performance Evaluations. IEEE Trans. Power Electron. 2016, 31, 648–661. [Google Scholar] [CrossRef]
- Xia, J.; Guo, Z.; Li, Z. Optimal Online Resonance Suppression in a Drive System Based on a Multifrequency Fast Search Algorithm. IEEE Access 2021, 9, 55373–55387. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Sator resistance/Ω | 1.6 |
| D-axis induction | 3.5 |
| Q-axis induction | 3.5 |
| Flux linkage | 0.0593 |
| Pole pairs P | 4 |
| Inertia of motor | 2.45 × 10−4 |
| Indicator | Proposed Method (LPF-CSOGI-FLL) | Method A (Reference [12]) | Method B (Reference [13]) |
|---|---|---|---|
| Frequency Identification Accuracy | High (Error < 1%) | Low (Error > 5%) | Medium (Error < 3%) |
| Computational Complexity | Medium | Low | Medium |
| Responsiveness | Fast | Average | Average |
| Effectiveness of Mechanical Resonance Suppression | Significant | Average | Relatively Good |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, K.; Zhang, Y.; Lu, W.; Sun, L.; Wang, L.; Shi, W. Online Mechanical Resonance Frequency Identification Method Based on an Improved Second-Order Generalized Integrator—Frequency-Locked Loop. Electronics 2024, 13, 3310. https://doi.org/10.3390/electronics13163310
Wu K, Zhang Y, Lu W, Sun L, Wang L, Shi W. Online Mechanical Resonance Frequency Identification Method Based on an Improved Second-Order Generalized Integrator—Frequency-Locked Loop. Electronics. 2024; 13(16):3310. https://doi.org/10.3390/electronics13163310
Chicago/Turabian StyleWu, Kelu, Yongchao Zhang, Wenqi Lu, Lei Sun, Luojun Wang, and Weimin Shi. 2024. "Online Mechanical Resonance Frequency Identification Method Based on an Improved Second-Order Generalized Integrator—Frequency-Locked Loop" Electronics 13, no. 16: 3310. https://doi.org/10.3390/electronics13163310
APA StyleWu, K., Zhang, Y., Lu, W., Sun, L., Wang, L., & Shi, W. (2024). Online Mechanical Resonance Frequency Identification Method Based on an Improved Second-Order Generalized Integrator—Frequency-Locked Loop. Electronics, 13(16), 3310. https://doi.org/10.3390/electronics13163310