
A Synchronization Algorithm for MBOC Signal Based on Reconstructed Correlation Function


Abstract
1. Introduction
2. Analysis of Synchronization Algorithms
2.1. MBOC Signal
2.2. Reconstruction Rules for the Algorithms in This Paper
2.3. Acquisition Loop Analysis
- (1)
- The received signal is mixed with the locally generated carrier to strip the carrier [21].
- (2)
- Local generation of MBOC signal, BOC(1,1) signal with PRN code.
- (3)
- The three locally generated auxiliary signals are correlated with the received signal.
- (4)
- Reconstruction of the three correlation functions obtained in the previous step according to the reconstruction rule to obtain the final detection volume.
2.4. Tracking Loop Analysis
3. Results and Discussion
3.1. Deblurring Validity
3.2. Detection Probability
3.3. Peak-to-Average Ratio
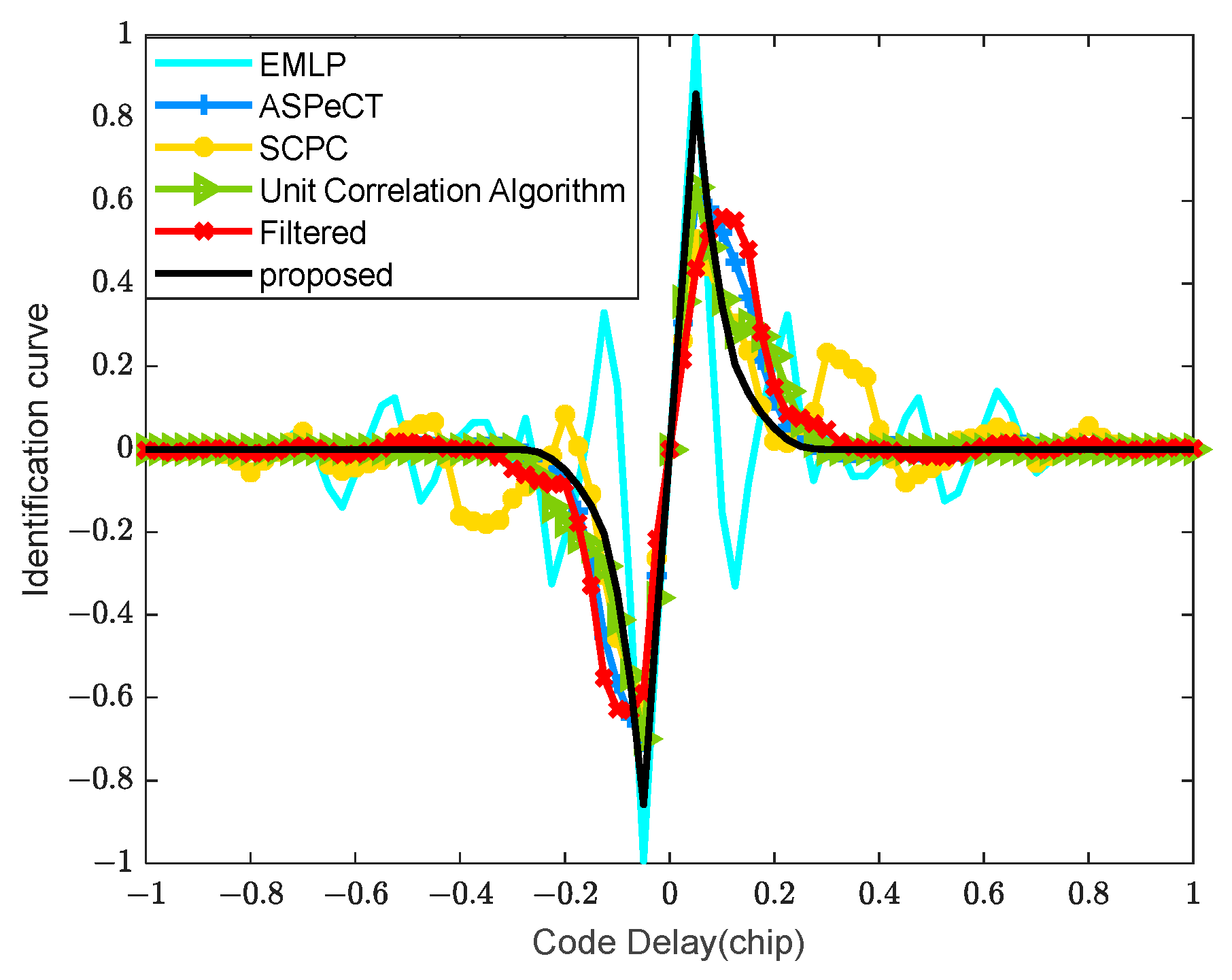
3.4. Phase Identification Curve
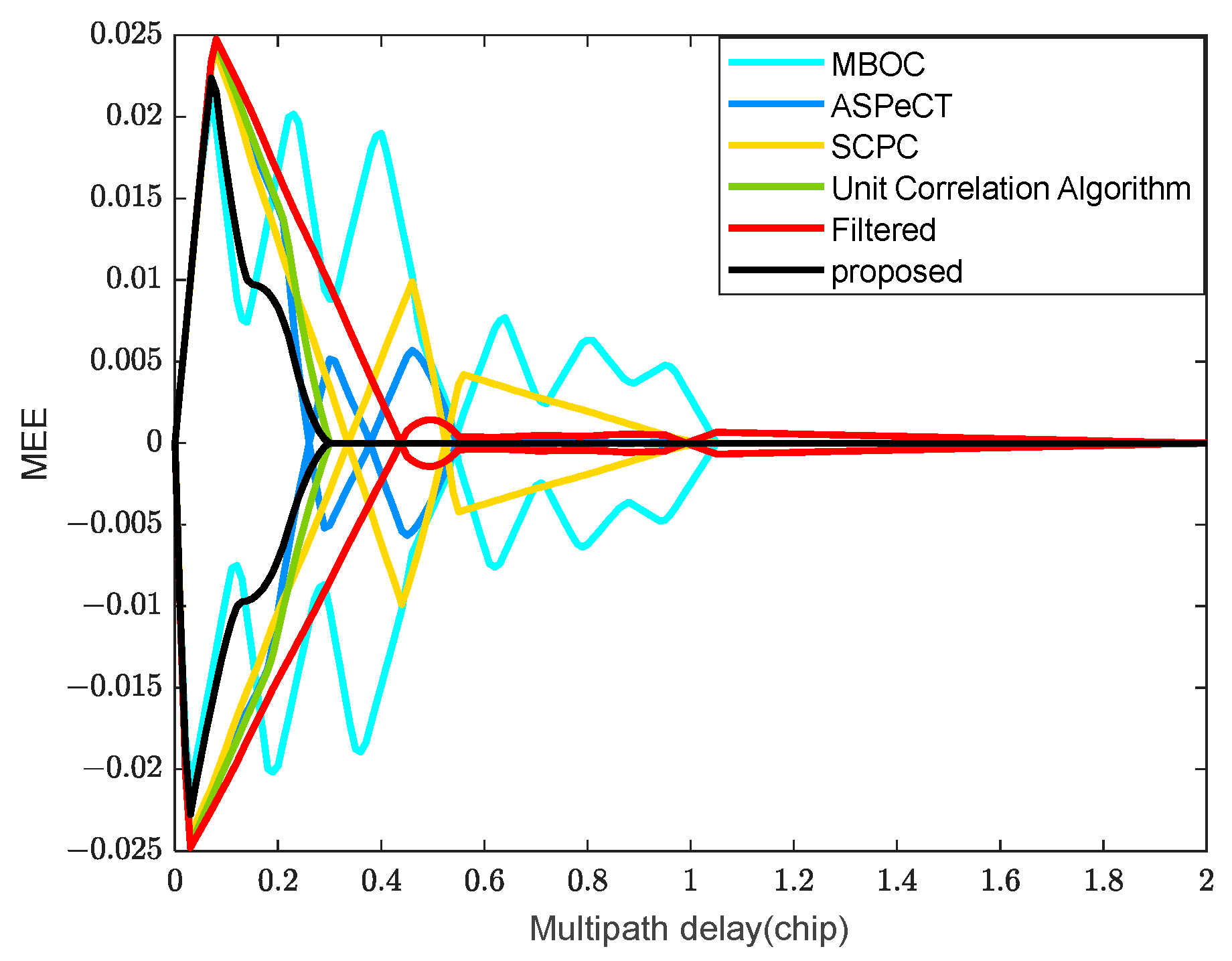
3.5. Anti-Multipath
3.6. Complexity Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Avila-Rodriguez, J.-A.; Hein, G.W.; Wallner, S.; Issler, J.-L.; Ries, L.; Lestarquit, L.; Latour, A.D.; Godet, J.; Bastide, F.; Pratt, T.; et al. The MBOC Modulation: The Final Touch to the Galileo Frequency and Signal Plan. Navigation 2008, 55, 15–28. [Google Scholar] [CrossRef]
- Yang, Z.; Huang, Z.; Geng, S. Codes Cross-Correlation Analysis and Data/Pilot Code Pairs Optimization for Galileo E1 OS and GPS L1C. Chin. J. Aeronaut. 2013, 26, 751–765. [Google Scholar] [CrossRef]
- Zitouni, S.; Rouabah, K.; Chikouche, D.; Mokrani, K.; Atia, S.; Harba, R.; Ravier, P. General Analytical Models Characterizing MBOC Modulated Signal. Aerosp. Sci. Technol. 2016, 50, 112–126. [Google Scholar] [CrossRef]
- Upadhyay, D.J.; Bhadouria, V.S.; Majithiya, P.J.; Bera, S.C. Synthesized Binary Offset Carrier Modulation for Interoperable GNSS L1 Band Signals. NAVIGATION J. Inst. Navig. 2024, 2, 71. [Google Scholar] [CrossRef]
- Zitouni, S.; Chikouche, D.; Rouabah, K. Common GPS/Galileo Signals: MBOC VS BOC(1,1) Performance Comparison. In Proceedings of the 2013 8th International Workshop on Systems, Signal Processing and Their Applications (WoSSPA), Algiers, Algeria, 12–15 May 2013; pp. 510–514. [Google Scholar]
- Zhao, X.; Huang, X.; Liu, Z.; Xiao, Z.; Sun, G. Improved MBOC Modulations Based on Periodic Offset Subcarrier. IET Commun. 2021, 15, 1831–1848. [Google Scholar] [CrossRef]
- Fishman, P.M.; Betz, J.W. Predicting performance of direct acquisition for the M-code signal. In Proceedings of the 2000 National Technical Meeting of the Institute of Navigation, Anaheim, CA, USA, 26–28 January 2000; pp. 574–582. [Google Scholar]
- Martin, N.; Leblond, V.; Guillotel, G.; Heiries, V. BOC(x,y) Signal Acquisition Techniques and Performances. In Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation, Portland, OR, USA, 9–12 September 2003; pp. 188–198. [Google Scholar]
- Yang, L.; Pan, C.; Feng, Y.; Bo, Y. The Research of Side-Band Acquisition for BOC-Modulated Signal. In Proceedings of the 2007 International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–25 September 2007; pp. 645–648. [Google Scholar]
- Fu, Q.; Wang, H.; Ji, Y.; Shi, H. Research Development of Unambiguous Acquisition Method of BOC Signal. Mod. Def. Techonl. 2013, 41, 91–96+106. [Google Scholar]
- Fu, Q.; Chen, X.; Ji, Y.; Sun, X.; Wei, B. An Unambiguous Tracking Method Based on Combination of Sub Cross-Correlation Functions for BOC Signals. Trans. Beijing Inst. Technol. 2020, 40, 1207–1215. [Google Scholar]
- Longji, Z.; Ju, W. Ambiguity Mitigating Tracking Method for BOC(1,1) and MBOC(6,1,1/11) Signals. In Proceedings of the 2017 First International Conference on Electronics Instrumentation & Information Systems (EIIS), Harbin, China, 3–5 June 2017; pp. 1–4. [Google Scholar]
- Chae, K.; Lee, S.R.; Liu, H.; Yoo, S.; Kim, S.Y.; Jee, G.-I.; Yeom, D.-J.; Yoon, S. A Novel Unambiguous Composite Binary Offset Carrier(6,1,1/11) Tracking Based on Partial Correlations. Comput. Electr. Eng. 2016, 50, 54–66. [Google Scholar] [CrossRef]
- Chae, K.; Yoo, S.; Kim, S.Y.; Jee, G.-I.; Yeom, D.-J.; Yoon, S. Unambiguous Tracking Technique Based on Sub-Carrier Pulse Grouping for TMBOC-Modulated Signals in GPS. IEEE Access 2016, 4, 7785–7794. [Google Scholar] [CrossRef]
- Sun, X.; Song, S.; JI, Y.; Liang, W.; LI, Y. Novel Unambiguous Tracking Algorithm for BOC and Its Derivative Signals. J. Xidian Univ. 2022, 49, 58–66. [Google Scholar]
- Ji, Y.; Zhang, Y.; Sun, X.; Jia, X.; Li, J. Enhanced Synchronization Algorithms for BOC Signals Based on Reconstructed Sub-Correlation Functions. Electronics 2023, 12, 2839. [Google Scholar] [CrossRef]
- Yoon, S.; Chae, K.; Kim, S.Y. A New Approach to Local Signal Design for Enhanced TMBOC Signal Tracking. J. Electr. Eng. Technol. 2020, 15, 1837–1845. [Google Scholar] [CrossRef]
- Wang, P.; Hua, R.; Jin, Z. A Combined Sub-Carrier Unambiguous Tracking Algorithm of B1C Signals. J. Chin. Inert. Technol. 2023, 31, 569–577. [Google Scholar]
- Xu, R.; Tang, R.; Luo, K.; Zeng, Q.; Liu, J. Fast and High Accurate Acquisition Algorithm of BeiDou B1C Signal Based on ASPeCT. J. Chin. Inert. Technol. 2021, 29, 62–68. [Google Scholar]
- Zhang, T.; Yan, Z.; Ou, X.; Qian, W. Acquisition Algorithm Combining Parallel Code Phase with Fractal Reconstruction of TMBOC Modulation Signal. J. Shanghai Jiaotong Univ. 2016, 50, 782–787. [Google Scholar]
- Ji, Y.; Song, S.; Sun, X.; Guo, N.; Li, Y. A Novel Unambiguous Acquisition Algorithm Based on Segmentation Reconstruction for BOC(n,n) Signal. IEICE Trans. Commun. 2023, 106, 287–295. [Google Scholar] [CrossRef]
- Julien, O.; Macabiau, C.; Cannon, M.; Lachapelle, G. ASPeCT: Unambiguous Sine-BOC(n,n) Acquisition/Tracking Technique for Navigation Applications. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 150–162. [Google Scholar] [CrossRef]
- Heiries, V.; Roviras, D.; Ries, L.; Calmettes, V. Analysis of Non Ambiguous BOC Signal Acquisition Performance. In Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation, Long Beach, CA, USA, 21–24 September 2004; pp. 2611–2622. [Google Scholar]
- Ji, Y.; Liu, Y.; Zhen, W.; Sun, X.; Yu, B. An Unambiguous Acquisition Algorithm Based on Unit Correlation for BOC(n,n) Signal. IEICE Trans. Commun. 2017, 100, 1507–1513. [Google Scholar] [CrossRef]
- Avellone, G.; Frazzetto, M.; Messina, E. On the Acquisition Ambiguity for Galileo BOC(n,n) Modulated Signals. In Proceedings of the 2007 IEEE International Conference on Communications, Glasgow, UK, 24–28 June 2007; pp. 4438–4443. [Google Scholar]
- Li, M.; Hu, H.; Guo, M.; Yu, F.; Xie, H. Unambiguous acquisition algorithm based on cross-correlation function shift multiplication for BOC (m,n) signals. Acta Aeronaut. Astronaut. Sin. 2022, 43, 621–632. [Google Scholar]
- Zhen, M.; Changdi, L.; Feng, S. Unambiguous Acquisition Method for Satellite Navigation BOC Modulated Signals Based on the Design of Shape Code Vector. J. Syst. Sci. Math. Sci. 2024, 1–16. [Google Scholar]
- Sun, X.; Song, S.; Ji, Y.; Gan, X.; Yan, S.; Jia, X. An Unambiguous Synchronization Scheme for GNSS BOC Signals Based on Reconstructed Correlation Function. Sensors 2021, 21, 1982. [Google Scholar] [CrossRef]
- Hu, M.; Wu, D. Evaluation of Anti-Multipath Performance to Satellite Navigation Signal Tracking on L1/E1/B1 Frequency Band. J. Syst. Simul. 2016, 28, 106–113. [Google Scholar]
- Deng, Z.; Hu, E.; Yin, L.; Liu, W.; Yang, L.; Arain, Q.A. An Unambiguous Tracking Technique for Sine-BOC(Kn,n) Modulated GNSS Signals. Wirel. Pers. Commun. 2018, 103, 1101–1112. [Google Scholar] [CrossRef]
- Liu, H.; Cheng, X.; NI, S.; Wang, F. Evaluation of Multipath Mitigation Performances Based on Error Envelope. J. Natl. Univ. Def. Technol. 2011, 33, 72–75. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type | Parametric | Parameter Type | Parametric |
|---|---|---|---|
| Experimental Object | MBOC(6,1,1/11) | Code Phase Shift | 600 |
| Sampling frequency () | 40.92 MHz | Frequency search range | [−10 KHz, 10 KHz] |
| Intermediate frequency () | 30 MHz | Frequency search step | 500 Hz |
| Doppler frequency () | 2500 Hz | SNR | [−40 dB, −20 dB] |
| Algorithms | Real Multiplications | Real Addition |
|---|---|---|
| ASPeCT/SCPC | ||
| Unit Correlation Algorithm | ||
| Filtered Correlation Algorithm | ||
| proposed |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, T.; Ji, Y.; Sun, X. A Synchronization Algorithm for MBOC Signal Based on Reconstructed Correlation Function. Electronics 2024, 13, 3375. https://doi.org/10.3390/electronics13173375
Wu T, Ji Y, Sun X. A Synchronization Algorithm for MBOC Signal Based on Reconstructed Correlation Function. Electronics. 2024; 13(17):3375. https://doi.org/10.3390/electronics13173375
Chicago/Turabian StyleWu, Ting, Yuanfa Ji, and Xiyan Sun. 2024. "A Synchronization Algorithm for MBOC Signal Based on Reconstructed Correlation Function" Electronics 13, no. 17: 3375. https://doi.org/10.3390/electronics13173375
APA StyleWu, T., Ji, Y., & Sun, X. (2024). A Synchronization Algorithm for MBOC Signal Based on Reconstructed Correlation Function. Electronics, 13(17), 3375. https://doi.org/10.3390/electronics13173375