
Bio-Inspired Multimodal Motion Gait Control of Snake Robots with Environmental Adaptability Based on ROS

Abstract
:1. Introduction
2. Kinematic Model for Snake Robots with Orthogonal Joints
2.1. Coordinate System for Snake Robots
2.2. Kinematic Model for Snake Robot Body
2.3. Kinematic Model Based on Visual SLAM
3. Multimodal Motion Gait Control for Snake Robots
3.1. Rhythm Generation Based on a Bio-Inspired CPG Model
3.2. Generative Control for Multimodal Motion Gait
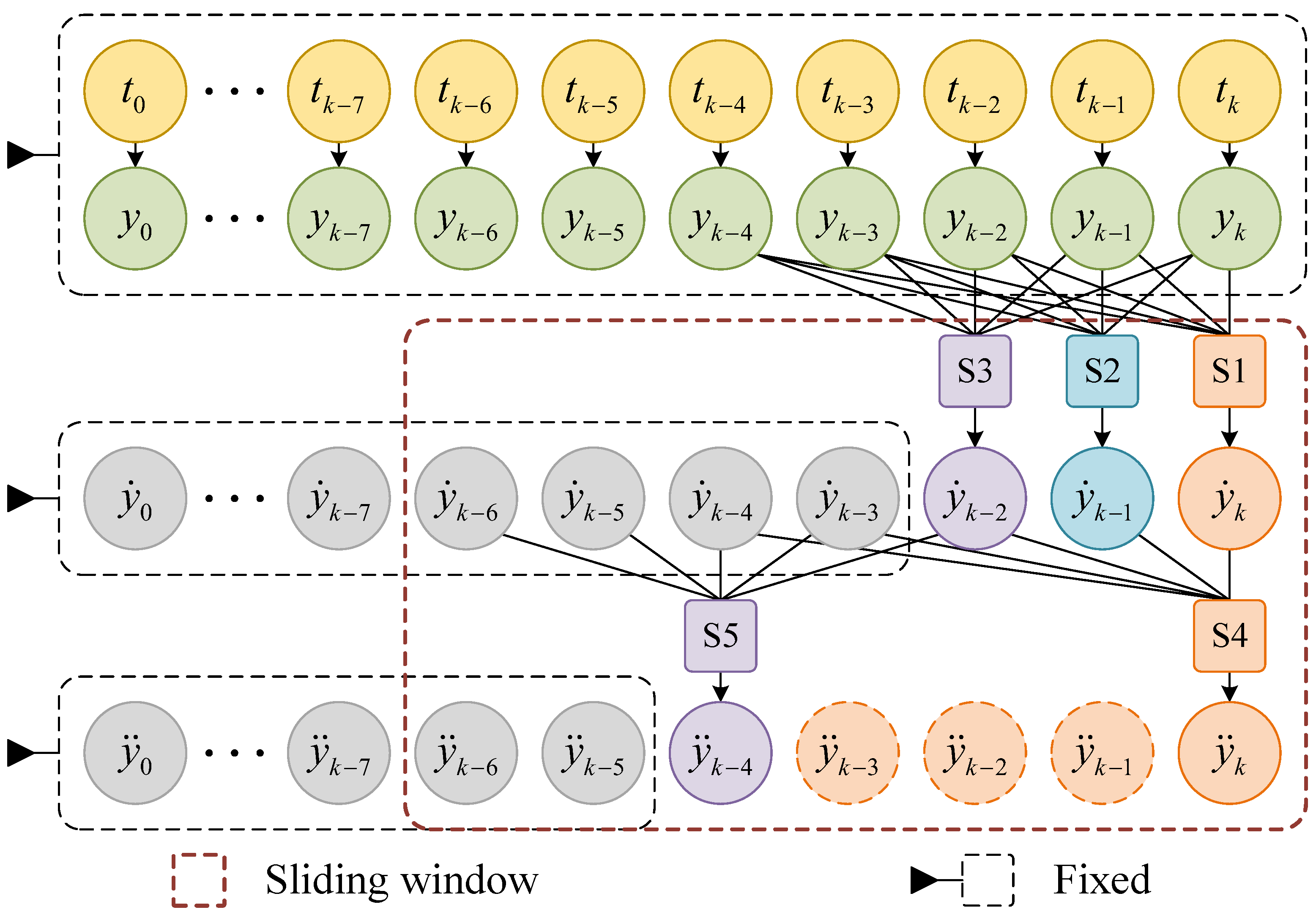
3.3. Sliding-Window Interpolation-Derivative Model for Rhythm
4. Design and Construction of SnakeSys
4.1. Control System Architecture of SnakeSys
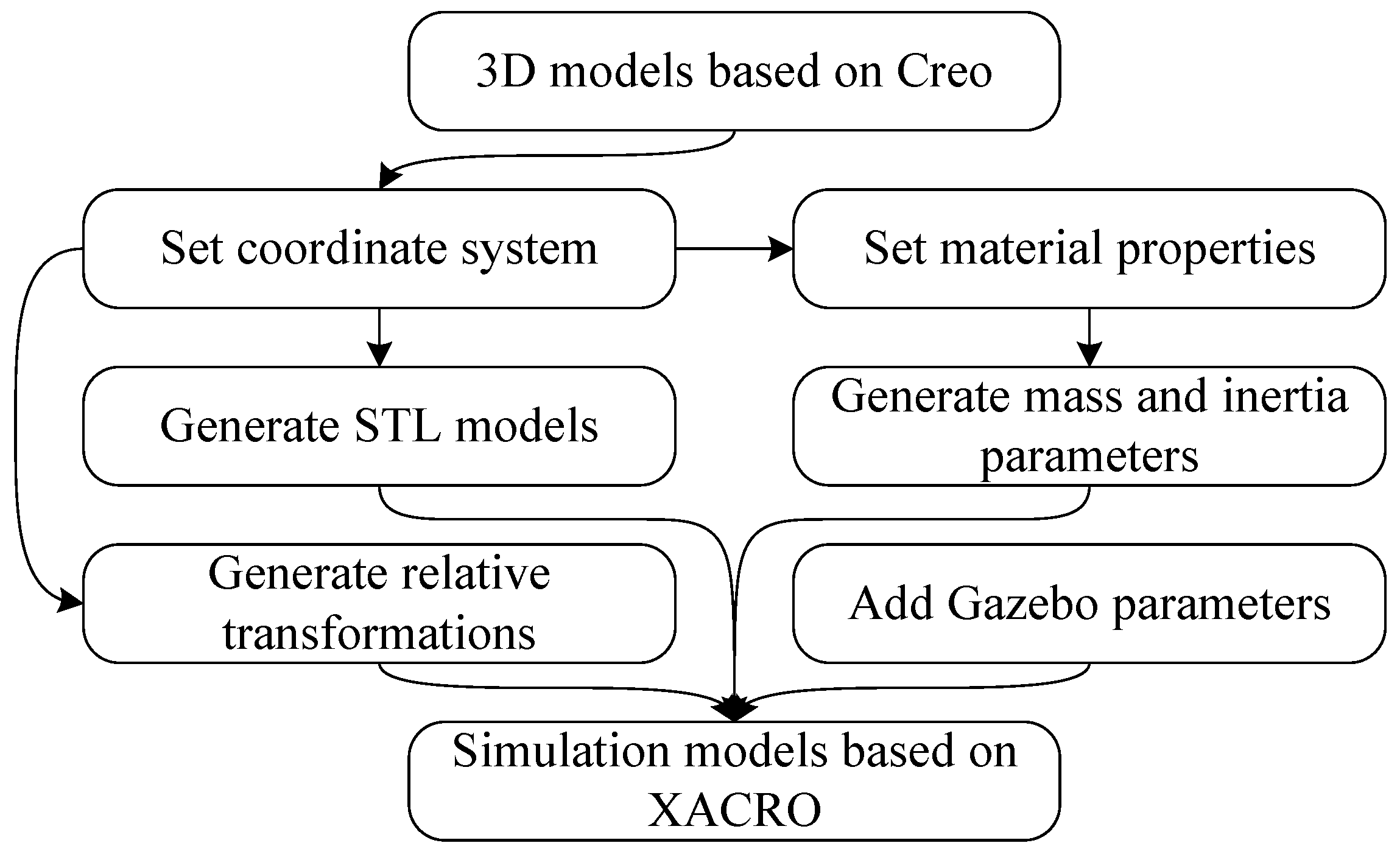
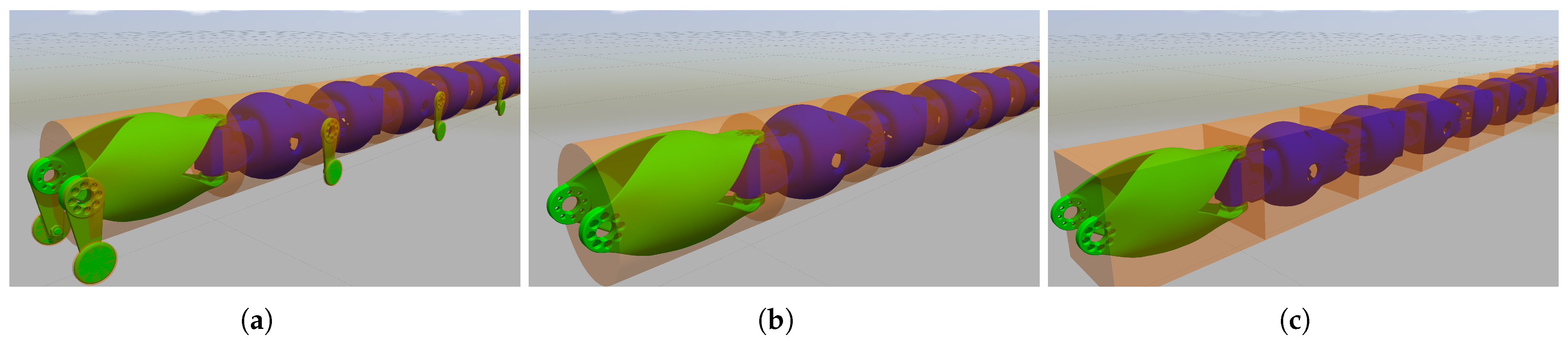
4.2. Simulator Module
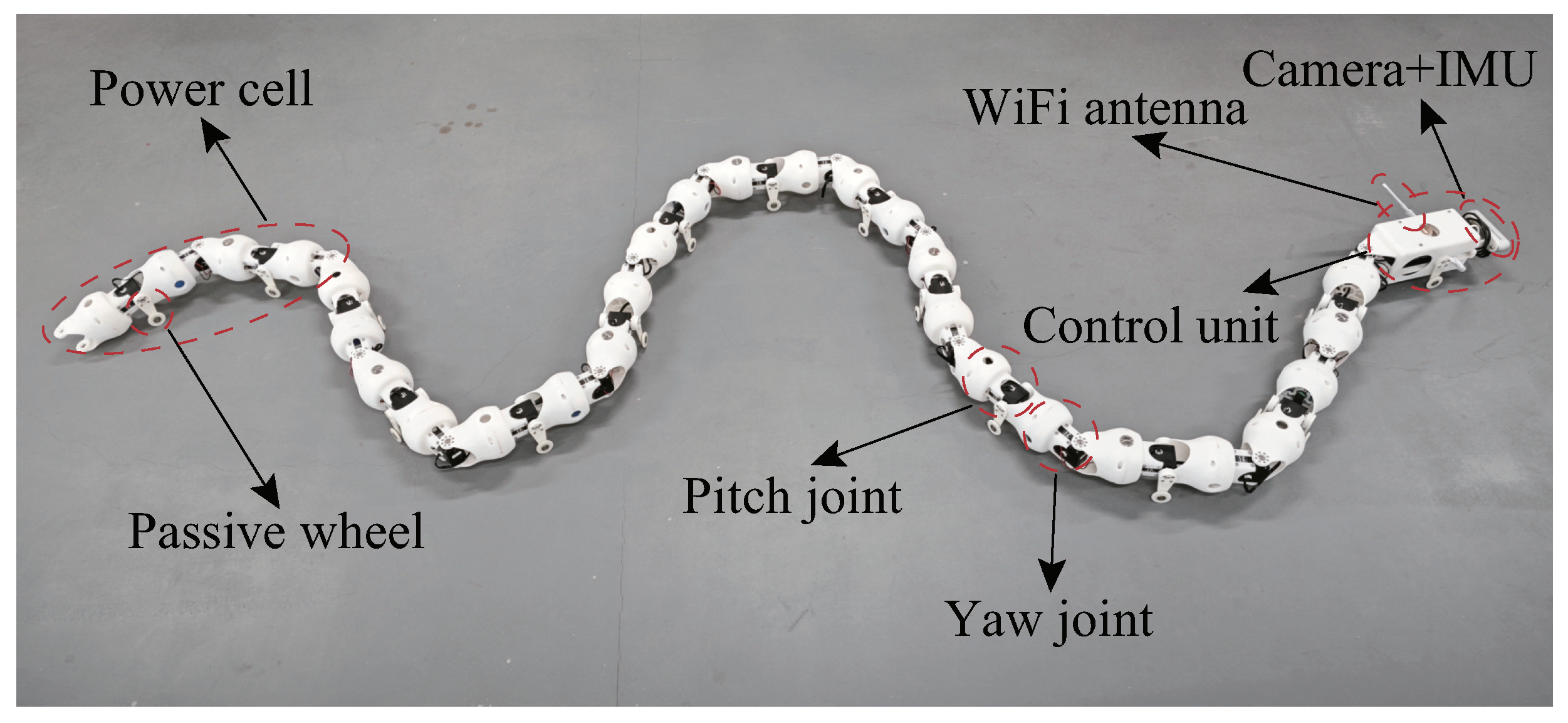
4.3. Prototype Module
4.4. Perception Module
4.5. Motion-Control Module
4.6. High-Level-Control Module
5. Simulations and Experiments
5.1. Simulations for Multiple Motion Gaits in a Simple Environment
5.2. Experiments for Multiple Motion Gaits in a Simple Environment
5.3. Experiments for Multiple Motion Gaits in Complex Environments
5.4. Information Perception of the Snake Robot
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Glossary
| Real number set | |
| n | Number of orthogonal joints of the snake robot |
| s | Number of map points |
| Number of joints of the snake robot Number of Hopf oscillators in the CPG model | |
| Length of the i-th joint linkage, m | |
| l | Length of each joint linkage, m |
| W | World frame |
| Left camera frame | |
| Right camera frame | |
| I | IMU frame |
| B | Base frame |
| Frame of the i-th joint linkage | |
| Frame of the i-th map point | |
| Transformation from the world frame W to the left camera frame | |
| Transformation from the left camera frame to the base frame B | |
| Transformation from the base frame B to the left camera frame | |
| Transformation from the world frame W to the i-th map point frame | |
| Transformation from the world frame W to the i-th joint linkage frame | |
| Transformation from the i-th joint linkage frame to the world frame W | |
| Transformation from the i-th joint linkage frame to the j-th map point frame | |
| Transformation from the world frame W to the base frame B | |
| Transformation from the base frame B to the i-th joint linkage frame | |
| Transformation from the i-th joint linkage frame to the j-th joint linkage frame | |
| Torsion angle of the linkage between axis and around the axis of the Craig agreement, rad | |
| Linkage length between axis and along the axis of the Craig agreement | |
| Linkage distance between axis and along the axis of the Craig agreement | |
| Rotation angle of the linkage between axis and around the axis of the Craig agreement, rad | |
| Position of the i-th joint of the snake robot, rad Phase of the i-th Hopf oscillator, ∘ | |
| Hopf oscillator | |
| Amplitude optimization function of the Hopf oscillator | |
| Lagrange interpolation polynomial | |
| Amplitude optimization term of the Hopf oscillator | |
| u | State variable of the Hopf oscillator |
| v | State variable of the Hopf oscillator |
| Central position of the limit cycle of the Hopf oscillator | |
| Central position of the limit cycle of the Hopf oscillator | |
| Decentralized state variable of the Hopf oscillator | |
| Decentralized state variable of the Hopf oscillator | |
| State variables of the Hopf oscillator | |
| Central positions of the limit cycle of the Hopf oscillator | |
| Decentralized state variables of the Hopf oscillator | |
| Frequency matrix of the Hopf oscillator | |
| Amplitude error matrix of the Hopf oscillator | |
| State variables of the CPG model | |
| Central positions of the limit cycle of the CPG model | |
| Decentralized state variables of the CPG model | |
| Rhythm output of the CPG model | |
| Mapped matrix of the CPG model | |
| Frequency matrix of the CPG model | |
| Amplitude error matrix of the CPG model | |
| Coupling error matrix of the CPG model | |
| Coupling transformation matrix of the CPG model | |
| Coupling weight matrix of the CPG model | |
| Two-dimensional zero matrix | |
| Two-dimensional identity matrix | |
| Two-dimensional transformation matrix between the i-th and j-th Hopf oscillators | |
| Coupling gain coefficient of the CPG model | |
| Attraction factor of each Hopf oscillator | |
| Bifurcation parameter of each Hopf oscillator | |
| Bifurcation parameter of the i-th Hopf oscillator | |
| Frequency of each Hopf oscillator, rad/s | |
| k | Optimization coefficient |
| Coupling weight from the j-th to the i-th Hopf oscillator | |
| Amplitude parameter of the Hopf oscillator | |
| Amplitude parameter of the i-th Hopf oscillator | |
| Phase difference from the i-th to the j-th Hopf oscillator, rad | |
| Phase difference matrix of the CPG model | |
| Initial angle of the waveform for yaw joints of the CL, TWL, and SWL gaits, ° | |
| Initial angle of the waveform for pitch joints of the CL, TWL, and SWL gaits, ° | |
| Number of waveforms of the CL, TWL, and SWL gaits | |
| Radius of the ARL gait, m | |
| Radius of the SRL gait, m | |
| Pitch parameter of the SRL gait, m | |
| Number of turns of the spiral curve of the SRL gait | |
| Discrete time of CPG output, s | |
| Joint position of one oscillator at time , ° | |
| Joint velocity of one oscillator at time , °/s | |
| Joint acceleration of one oscillator at time , °/s2 |
References
- Thandiackal, R.; Melo, K.; Paez, L.; Herault, J.; Kano, T.; Akiyama, K.; Boyer, F.; Ryczko, D.; Ishiguro, A.; Ijspeert, A.J. Emergence of robust self-organized undulatory swimming based on local hydrodynamic force sensing. Sci. Robot. 2021, 6, eabf6354. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Gao, Z.; Zang, Y.; Zhang, L. Tribological mechanism and propulsion conditions for creeping locomotion of the snake-like robot. J. Mech. Eng. 2021, 57, 13. [Google Scholar]
- Megalingam, R.K.; Senthil, A.P.; Raghavan, D.; Manoharan, S.K. Modeling of novel circular gait motion through daisy sequence fitting algorithm in a vertical climbing snake robot. J. Field Robot. 2024, 41, 211–226. [Google Scholar] [CrossRef]
- Ha, J. Robotic Snake Locomotion Exploiting Body Compliance and Uniform Body Tensions. IEEE Trans. Robot. 2023, 39, 3875–3887. [Google Scholar] [CrossRef]
- Chang, A.H.; Vela, P.A. Shape-centric modeling for control of traveling wave rectilinear locomotion on snake-like robots. Robot. Auton. Syst. 2020, 124, 103406. [Google Scholar] [CrossRef]
- Wang, T.; Lin, B.; Chong, B.; Whitman, J.; Travers, M.; Goldman, D.I.; Blekherman, G.; Choset, H. Reconstruction of backbone curves for snake robots. IEEE Robot. Autom. Lett. 2021, 6, 3264–3270. [Google Scholar] [CrossRef]
- Arachchige, D.D.; Perera, D.M.; Mallikarachchi, S.; Kanj, I.; Chen, Y.; Godage, I.S. Wheelless soft robotic snake locomotion: Study on sidewinding and helical rolling gaits. In Proceedings of the 2023 IEEE International Conference on Soft Robotics (RoboSoft), Singapore, 3–7 April 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar]
- Takemori, T.; Tanaka, M.; Matsuno, F. Adaptive helical rolling of a snake robot to a straight pipe with irregular cross-sectional shape. IEEE Trans. Robot. 2022, 39, 437–451. [Google Scholar] [CrossRef]
- Liu, Y. Review of snake robots in constrained environments. Robot. Auton. Syst. 2021, 141, 103785. [Google Scholar] [CrossRef]
- Wang, G.; Yang, W.; Shen, Y.; Shao, H.; Wang, C. Adaptive path following of underactuated snake robot on unknown and varied frictions ground: Theory and validations. IEEE Robot. Autom. Lett. 2018, 3, 4273–4280. [Google Scholar] [CrossRef]
- Mori, M.; Hirose, S. Three-dimensional serpentine motion and lateral rolling by active cord mechanism ACM-R3. In Proceedings of the Intelligent Robots and Systems, 2002. IEEE/RSJ International Conference, Lausanne, Switzerland, 30 September–4 October 2002. [Google Scholar]
- Komura, H.; Yamada, H.; Hirose, S. Development of snake-like robot ACM-R8 with large and mono-tread wheel. Adv. Robot. 2015, 29, 1081–1094. [Google Scholar] [CrossRef]
- Ohno, H.; Hirose, S. Pneumatically-Driven Active Cord Mechanism “Slim Slime Robot”. J. Robot. Mechatron. 2014, 26, 105–106. [Google Scholar] [CrossRef]
- Zuo, X.; Tang, J.; Tian, M.; Wang, X. A design of a snake robot inspired by waterbomb origami. In Proceedings of the 2022 IEEE International Conference on Robotics and Biomimetics (ROBIO), Jinghong, China, 5–9 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 2354–2360. [Google Scholar]
- Bi, Z.; Xu, J.; Fang, H. Design and path planning for a Worm-Snake-Inspired Metameric (WSIM) Robot. In Proceedings of the 2022 IEEE International Conference on Robotics and Biomimetics (ROBIO), Jinghong, China, 5–9 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 777–782. [Google Scholar]
- Qi, X.; Shi, H.; Pinto, T.; Tan, X. A novel pneumatic soft snake robot using traveling-wave locomotion in constrained environments. IEEE Robot. Autom. Lett. 2020, 5, 1610–1617. [Google Scholar] [CrossRef]
- Gautreau, E.; Sandoval, J.; Bonnet, X.; Arsicault, M.; Zeghloul, S.; Laribi, M.A. A new bio-inspired Hybrid Cable-Driven Robot (HCDR) to design more realistic snakebots. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 2134–2140. [Google Scholar]
- Hirose, S.; Yamada, H. Snake-like robots [tutorial]. IEEE Robot. Autom. Mag. 2009, 16, 88–98. [Google Scholar] [CrossRef]
- Ma, S. Analysis of snake movement forms for realization of snake-like robots. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C), Detroit, MI, USA, 10–15 May 1999; IEEE: Piscataway, NJ, USA, 1999; Volume 4, pp. 3007–3013. [Google Scholar]
- Tang, C.; Sun, L.; Zhou, G.; Shu, X.; Tang, H.; Wu, H. Gait Generation Method of Snake Robot Based on Main Characteristic Curve Fitting. Biomimetics 2023, 8, 105. [Google Scholar] [CrossRef]
- Takemori, T.; Tanaka, M.; Matsuno, F. Hoop-Passing Motion for a Snake Robot to Realize Motion Transition across Different Environments. IEEE Trans. Robot. 2021, 37, 1696–1711. [Google Scholar] [CrossRef]
- Yu, J.; Tan, M.; Chen, J.; Zhang, J. A Survey on CPG-Inspired Control Models and System Implementation. IEEE Trans. Neural Netw. Learn. Syst. 2017, 25, 441–456. [Google Scholar] [CrossRef]
- Ijspeert, A.J. Central pattern generators for locomotion control in animals and robots: A review. Neural Netw. 2008, 21, 642–653. [Google Scholar] [CrossRef] [PubMed]
- Lin, F.; Zhang, G. Multimodal swimming control of bionic fish based on CPG. In Proceedings of the 2023 35th Chinese Control and Decision Conference (CCDC), Yichang, China, 20–22 May 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 4633–4638. [Google Scholar]
- Shaw, S.; Sartoretti, G. Keyframe-based CPG for stable gait design and online transitions in legged robots. In Proceedings of the 2022 IEEE 61st Conference on Decision and Control (CDC), Cancun, Mexico, 6–9 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 756–763. [Google Scholar]
- Song, Z.; Huang, X.; Xu, J. Spatiotemporal pattern of periodic rhythms in delayed Van der Pol oscillators for the CPG-based locomotion of snake-like robot. Nonlinear Dyn. 2022, 110, 3377–3393. [Google Scholar] [CrossRef]
- Song, Z.; Xu, J. Multi-coexistence of routes to chaos in a delayed half-center oscillator (DHCO) system. Nonlinear Dyn. 2024, 112, 1469–1486. [Google Scholar] [CrossRef]
- Song, Z.; Xu, J. Multiple switching and bifurcations of in-phase and anti-phase periodic orbits to chaotic coexistence in a delayed half-center CPG oscillator. Nonlinear Dyn. 2023, 111, 16569–16584. [Google Scholar] [CrossRef]
- Song, Z.; Xu, J. Self-/mutual-symmetric rhythms and their coexistence in a delayed half-center oscillator of the CPG neural system. Nonlinear Dyn. 2022, 108, 2595–2609. [Google Scholar] [CrossRef]
- Yang, G.; Ma, S.; Li, B.; Wang, M. A hierarchical connectionist CPG controller for controlling the snake-like robot’s 3-dimensional gaits. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 822–827. [Google Scholar]
- Manzoor, S.; Choi, Y. A unified neural oscillator model for various rhythmic locomotions of snake-like robot. Neurocomputing 2016, 173, 1112–1123. [Google Scholar] [CrossRef]
- Zhang, D.; Xiao, Q.; Cao, Z. Gait Generation with Smooth Transition Using Neural Oscillator Network Based Locomotion Control for Snake-Like Robot. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019. [Google Scholar]
- Wang, Z.; Gao, Q.; Zhao, H. CPG-Inspired Locomotion Control for a Snake Robot Basing on Nonlinear Oscillators. J. Intell. Robot. Syst. 2017, 85, 209–227. [Google Scholar] [CrossRef]
- Fukuoka, Y.; Otaka, K.; Takeuchi, R.; Shigemori, K.; Inoue, K. Mechanical Designs for Field Undulatory Locomotion by a Wheeled Snake-Like Robot with Decoupled Neural Oscillators. IEEE Trans. Robot. 2023, 39, 959–977. [Google Scholar] [CrossRef]
- Burden, S.A.; Libby, T.; Jayaram, K.; Sponberg, S.; Donelan, J.M. Why animals can outrun robots. Sci. Robot. 2024, 9, eadi9754. [Google Scholar] [CrossRef]
- Macenski, S.; Soragna, A.; Carroll, M.; Ge, Z. Impact of ROS 2 Node Composition in Robotic Systems. IEEE Robot. Autom. Lett. 2023. [Google Scholar] [CrossRef]
- Macenski, S.; Foote, T.; Gerkey, B.; Lalancette, C.; Woodall, W. Robot Operating System 2: Design, architecture, and uses in the wild. Sci. Robot. 2022, 7, eabm6074. [Google Scholar] [CrossRef]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 3, pp. 2149–2154. [Google Scholar]
- Sanfilippo, F.; Stavdahl, Ø.; Liljebäck, P. SnakeSIM: A ROS-based rapid-prototyping framework for perception-driven obstacle-aided locomotion of snake robots. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1226–1231. [Google Scholar]
- Ni, F.; Li, Y.; Zhou, Y.; Zhao, L.; Liu, H. Design of a Hierarchical Control System for Tetherless Snake Robot. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1254–1259. [Google Scholar]
- Zhou, Y.; Li, Z.; Zhang, Y.; Ni, F.; Sun, Y.; Liu, H. The real-time control framework for a modular snake robot. In Proceedings of the 2019 4th International Conference on Robotics and Automation Engineering (ICRAE), Singapore, 22–24 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 168–172. [Google Scholar]
- Ding, C.; Zhou, J.; Wu, L.; Ren, C. Path Planning and Gait Control of Snake Robot Based on PAPF and MPC. In Proceedings of the 2023 42nd Chinese Control Conference (CCC), Tianjin, China, 24–26 July 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 2934–2939. [Google Scholar]
- Melo, K.; Leon, J.; di Zeo, A.; Rueda, V.; Roa, D.; Parraga, M.; Gonzalez, D.; Paez, L. The modular snake robot open project: Turning animal functions into engineering tools. In Proceedings of the 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Linköping, Sweden, 21–26 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–6. [Google Scholar]
- Cai, Z. Fundamentals of Robotics; China Machine Press: Beijing, China, 2021. [Google Scholar]
- Liu, X.; Zang, Y.; Gao, Z.; Liao, M. Locomotion gait control of snake robots based on a novel unified CPG network model composed of Hopf oscillators. Robot. Auton. Syst. 2024, 179, 104746. [Google Scholar] [CrossRef]
- Campos, C.; Elvira, R.; Rodríguez, J.J.G.; Montiel, J.M.; Tardós, J.D. ORB-SLAM3: An accurate open-source library for visual, visual–inertial, and multimap slam. IEEE Trans. Robot. 2021, 37, 1874–1890. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index i | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | |
| 2 | 0 | |||
| 3 | 0 | |||
| 4 | 0 | |||
| 5 | 0 | |||
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| 0 | ||||
| N | 0 |
| Snake Robot | I | II | III |
|---|---|---|---|
| Length of linkage (m) | |||
| Number of joints | 28 | 28 | 28 |
| Range of joint (°) | ±120 | ±90 | ±90 |
| Passive wheel | Yes/No | Yes/No | Yes/No |
| Cross-section | Rectangle | Rectangle | Circle |
| Parameter | CL | TWL | SWL | ARL | SRL |
|---|---|---|---|---|---|
| 2 | 3 | 2 | − | − | |
| (°) | 50 | 50 | − | − | |
| (°) | 50 | 15 | − | − | |
| − | − | − | 2 | − | |
| − | − | − | − | ||
| − | − | − | − | ||
| () |
| Parameter | CL | SWL | ARL |
|---|---|---|---|
| 2 | 2 | − | |
| (°) | 50 | 50 | − |
| (°) | 0.1 | 15 | − |
| − | − | 1 | |
| () |
| Parameter | SWL1 | SWL2 | SWL3 | SWL4 | ARL1 | ARL2 | ARL3 | ARL4 |
|---|---|---|---|---|---|---|---|---|
| 2 | 2 | 2 | 2 | − | − | − | − | |
| (°) | 50 | 70 | 50 | 70 | − | − | − | − |
| (°) | 20 | 20 | 20 | 20 | − | − | − | − |
| − | − | − | − | 1 | 1 | |||
| () |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Zang, Y.; Gao, Z. Bio-Inspired Multimodal Motion Gait Control of Snake Robots with Environmental Adaptability Based on ROS. Electronics 2024, 13, 3437. https://doi.org/10.3390/electronics13173437
Liu X, Zang Y, Gao Z. Bio-Inspired Multimodal Motion Gait Control of Snake Robots with Environmental Adaptability Based on ROS. Electronics. 2024; 13(17):3437. https://doi.org/10.3390/electronics13173437
Chicago/Turabian StyleLiu, Xupeng, Yong Zang, and Zhiying Gao. 2024. "Bio-Inspired Multimodal Motion Gait Control of Snake Robots with Environmental Adaptability Based on ROS" Electronics 13, no. 17: 3437. https://doi.org/10.3390/electronics13173437