


Design and Development of Shadow: A Cost-Effective Mobile Social Robot for Human-Following Applications


Abstract
:1. Introduction
2. Background
Robot Comparison
3. Requirements
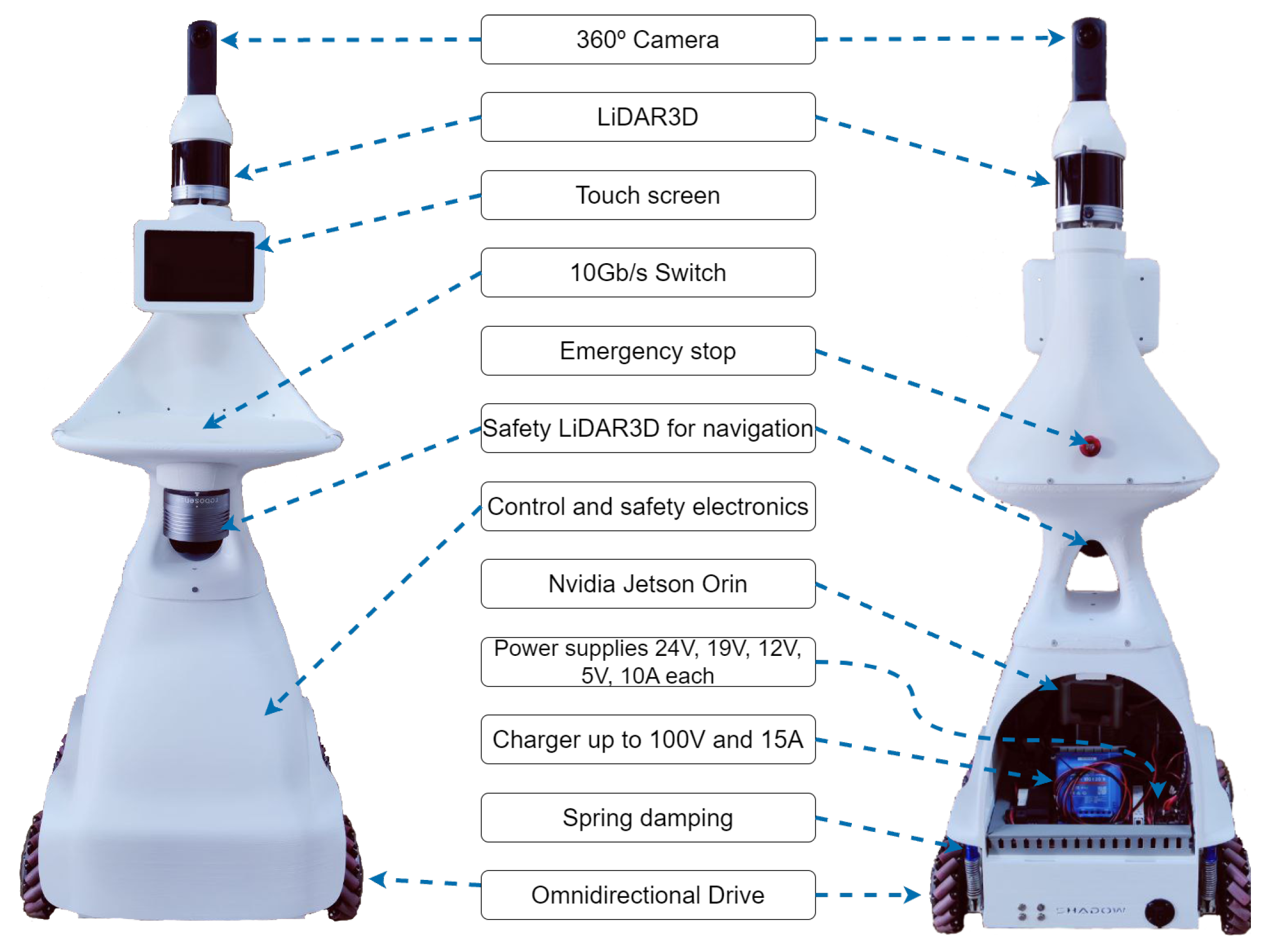
4. Shadow Robot
4.1. Prototyping
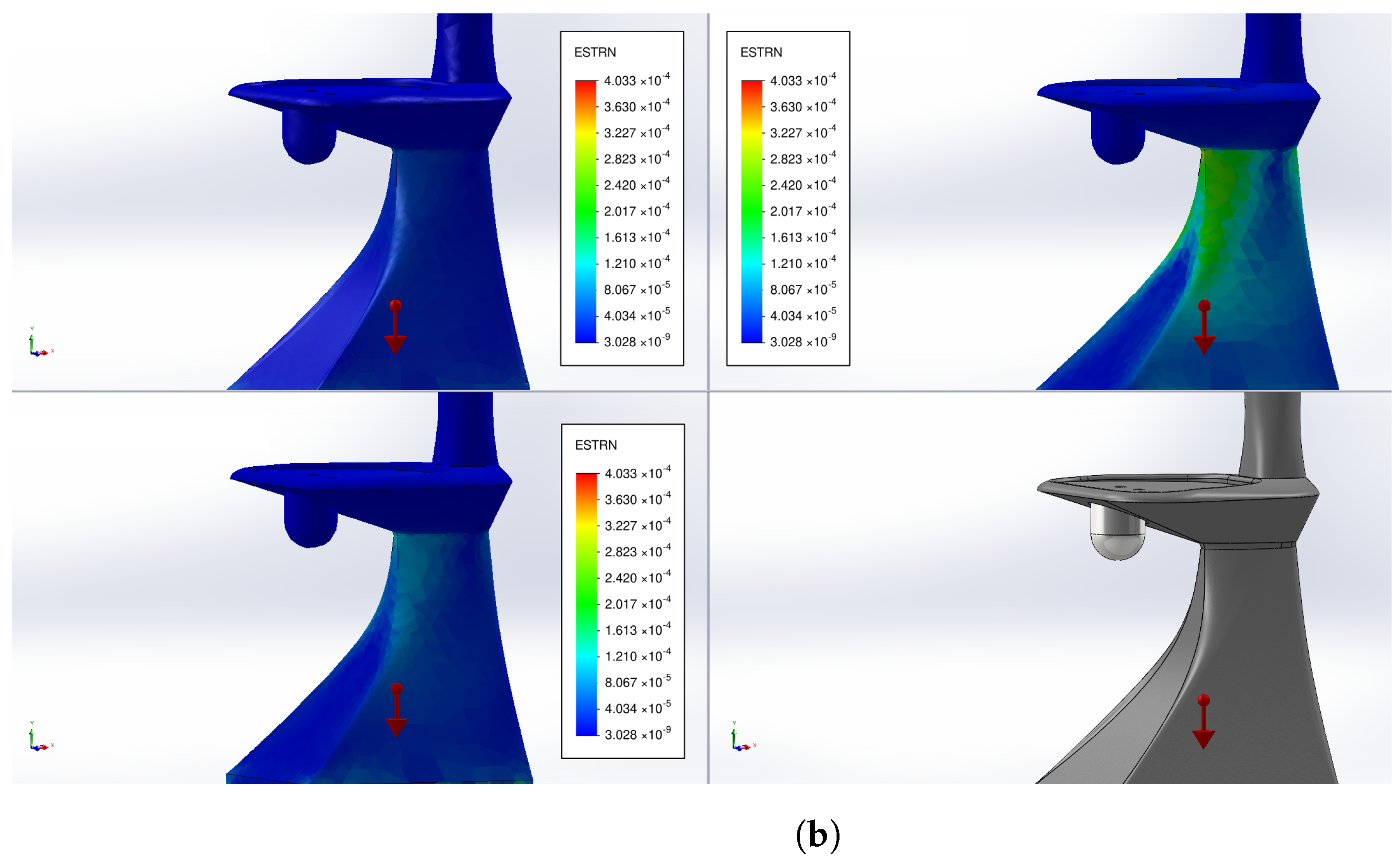
4.2. Body Design
4.3. Mobile Base
4.4. Materials
- PLA: is a cost-effective, easy-to-print, and cheap material. However, it has a low thermal resistance and can become malleable at temperatures of around 65 °C.
- ABS: offers better mechanical and thermal performance compared to PLA. It is more challenging to print, particularly for long-duration prints, due to warping, where the first layer may lift off the print bed. Despite this, ABS is tougher and more heat-resistant than PLA.
- TPU HARDNESS+: this material is more impact-resistant than both PLA and ABS and offers good flexibility. It is also relatively easy to print, though it comes at a higher cost. TPU’s properties make it suitable for applications requiring durable parts.
- PC: polycarbonate is known for its exceptional rigidity and strength. However, it is brittle and challenging to print with, often resulting in imperfections and inaccuracies. These defects can create stress concentration points, leading to potential fractures under load.
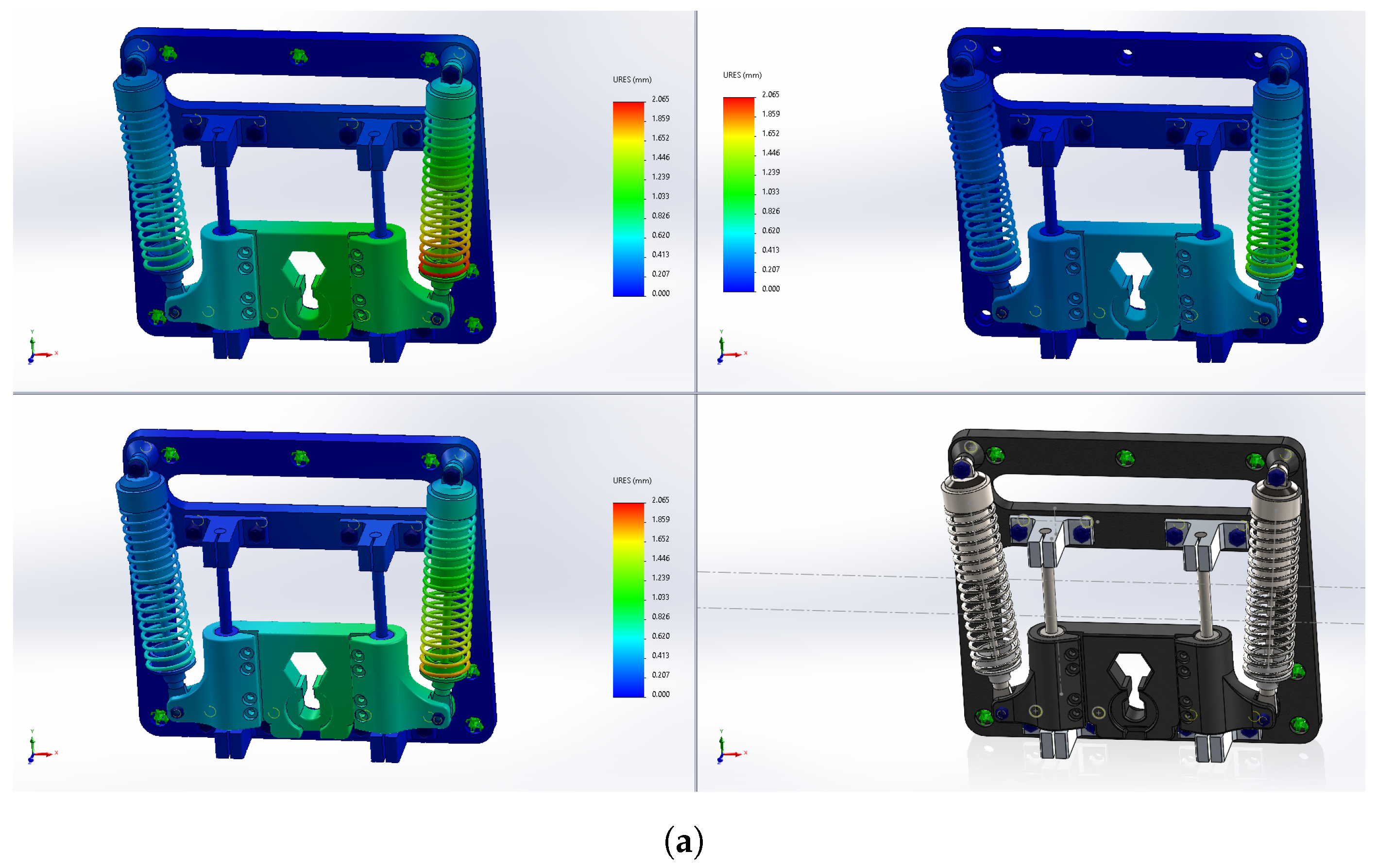
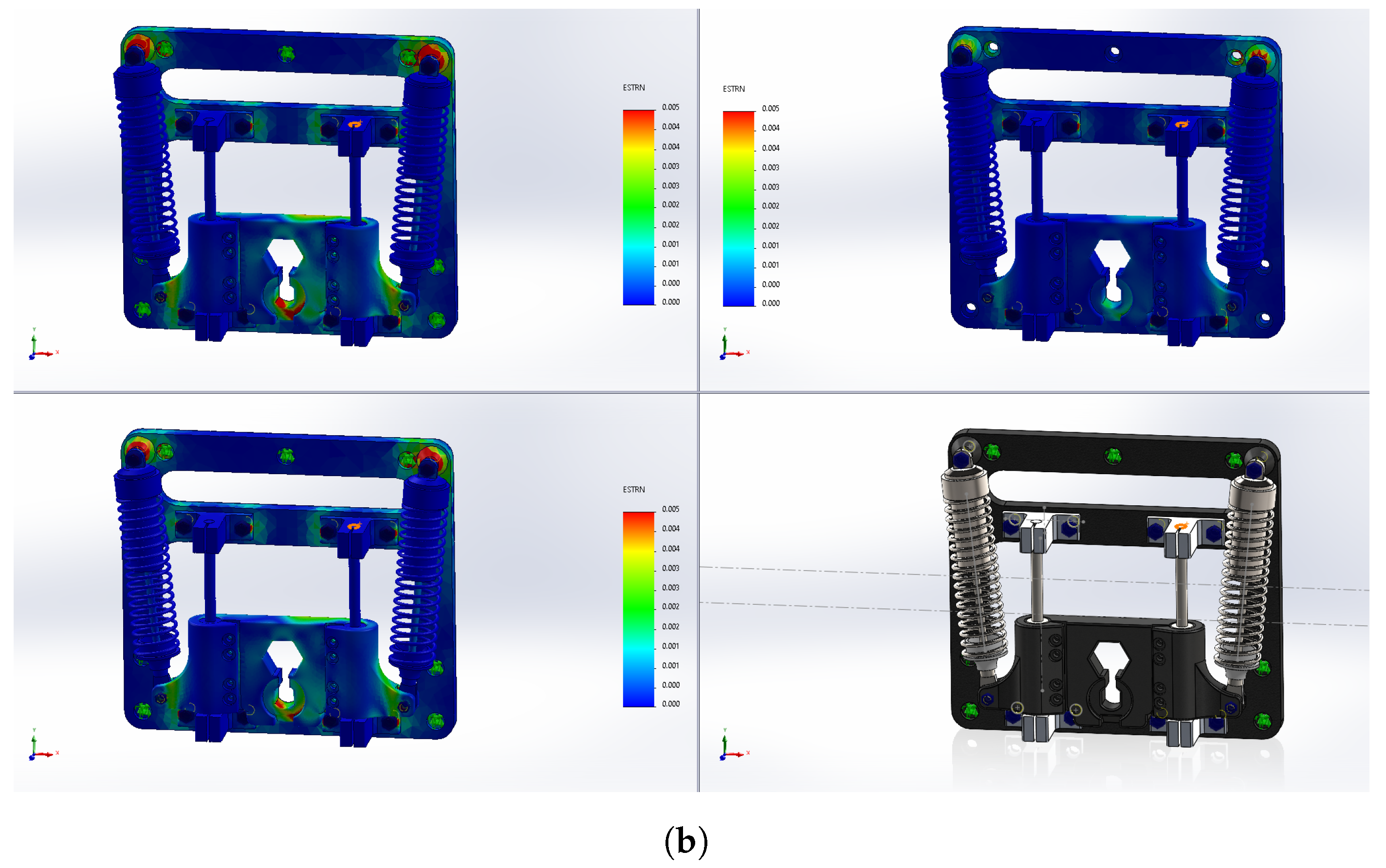
4.5. Suspension System
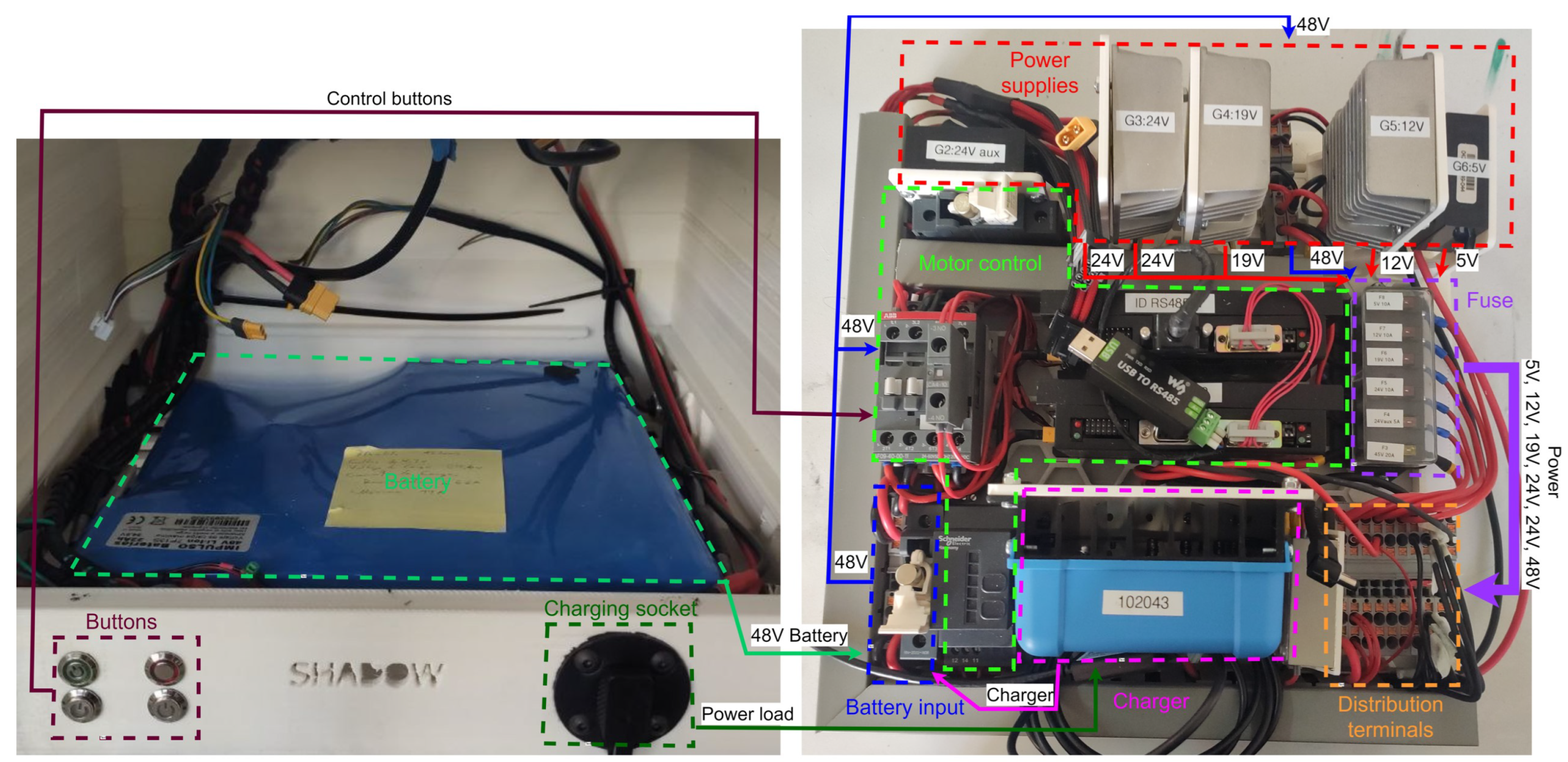
4.6. Power Electronics
4.7. Perception System
- Internal sensors. Internal sensors measure the robot’s internal state and are critical for maintaining operational efficiency and safety. These sensors include:
- –
- Voltmeter and ammeter on each power bus: These sensors monitor the voltage and current on each power bus, ensuring that all components receive the correct power levels and helping to detect any irregularities that might indicate potential issues.
- –
- Battery status and charge monitoring: These sensors track the charge level and overall health of the battery, providing essential information to prevent overcharging or deep discharge, which could damage the battery.
- –
- Temperature sensors: Placed at several points in the Shadow, these sensors monitor the temperature of key components to prevent overheating and ensure optimal operating conditions.
- –
- AHRS-IMU (Attitude and Heading Reference System—Inertial Measurement Unit): This sensor provides data on the robot’s orientation, acceleration, and angular velocity, which are crucial for maintaining stability and accurate navigation (WT901B, Witmotion, Shenzhen, China).
A dedicated embedded processor reads these internal sensors. This processor continuously collects data from all internal sensors and creates a comprehensive data structure representing the robot’s current internal state. This data structure is then published and made available to other robot subsystems, enabling real-time monitoring and dynamic adjustments as needed. This architecture, supported by CORTEX, ensures that Shadow can maintain optimal performance and respond swiftly to any internal anomalies, enhancing its reliability and safety during operation. - External sensors. External sensors give Shadow access to the outside world, enabling it to perceive and interact with its environment effectively. These sensors include:
- –
- 3D LiDARs: Shadow is equipped with two 3D LiDARs (Helios and Bpearl models, from Robosense) that provide comprehensive coverage of the surrounding environment. The first LiDAR, placed on the head of the robot, has a conventional configuration with 32 elements, covering angles from 10° upwards to −55° downwards. This sensor is essential for detecting obstacles and mapping the environment at various heights. The second LiDAR is a dome-type model that offers extensive coverage of solid degrees, ensuring that Shadow can detect obstacles and navigate safely in almost all directions. This configuration provides near-complete coverage of the volume surrounding the robot, making it highly effective in dynamic and complex environments.
- –
- 360° RGB camera: This camera provides a 4 K H264 compressed stream constructed from two 180° fisheye cameras placed back to back. This setup allows for a full panoramic view, essential for tasks requiring a comprehensive visual context, such as people tracking and semantic navigation.
5. Experimental Results
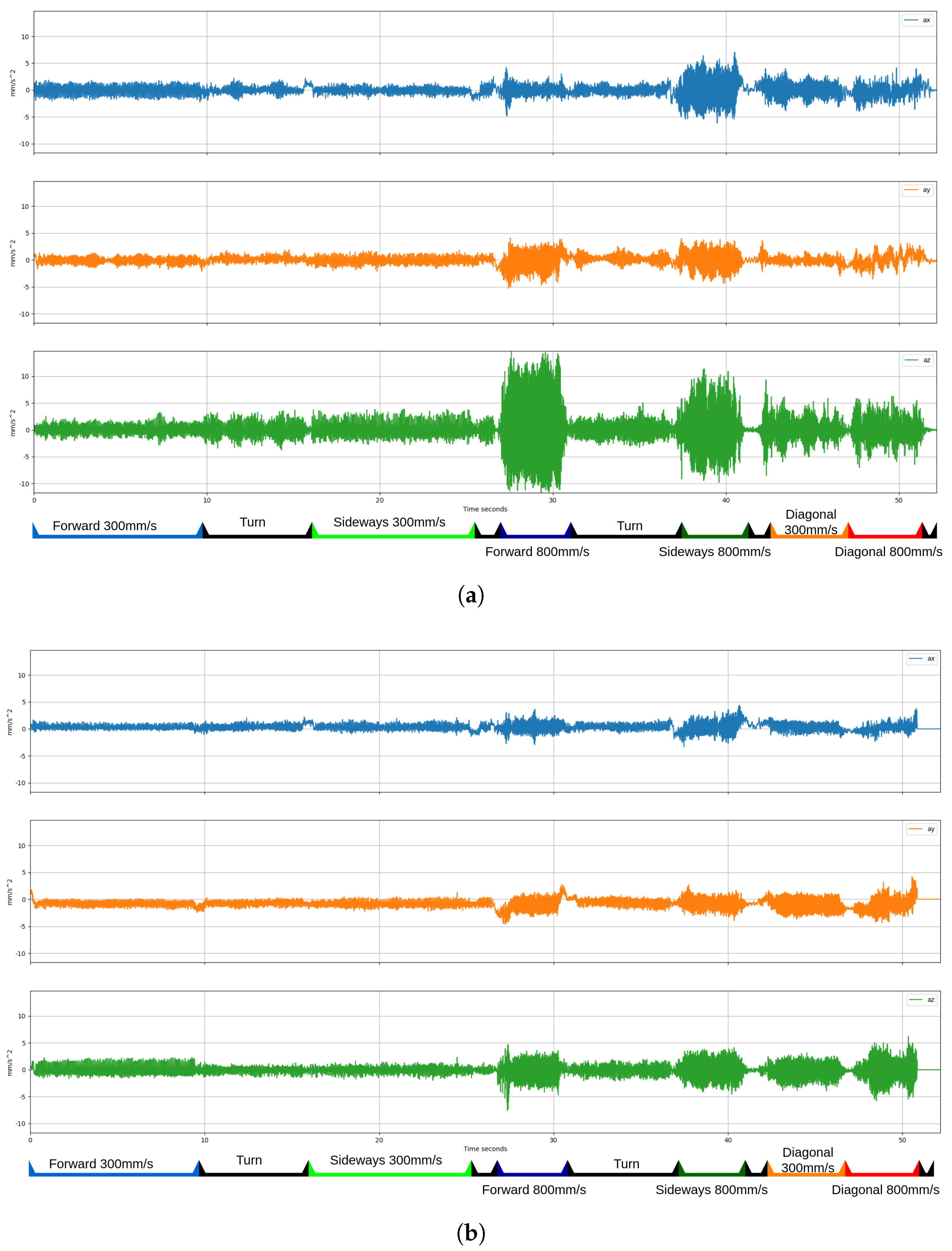
5.1. Suspension System Validation
5.2. Sensor Calibration and Data Fusion
5.3. People Following Navigation
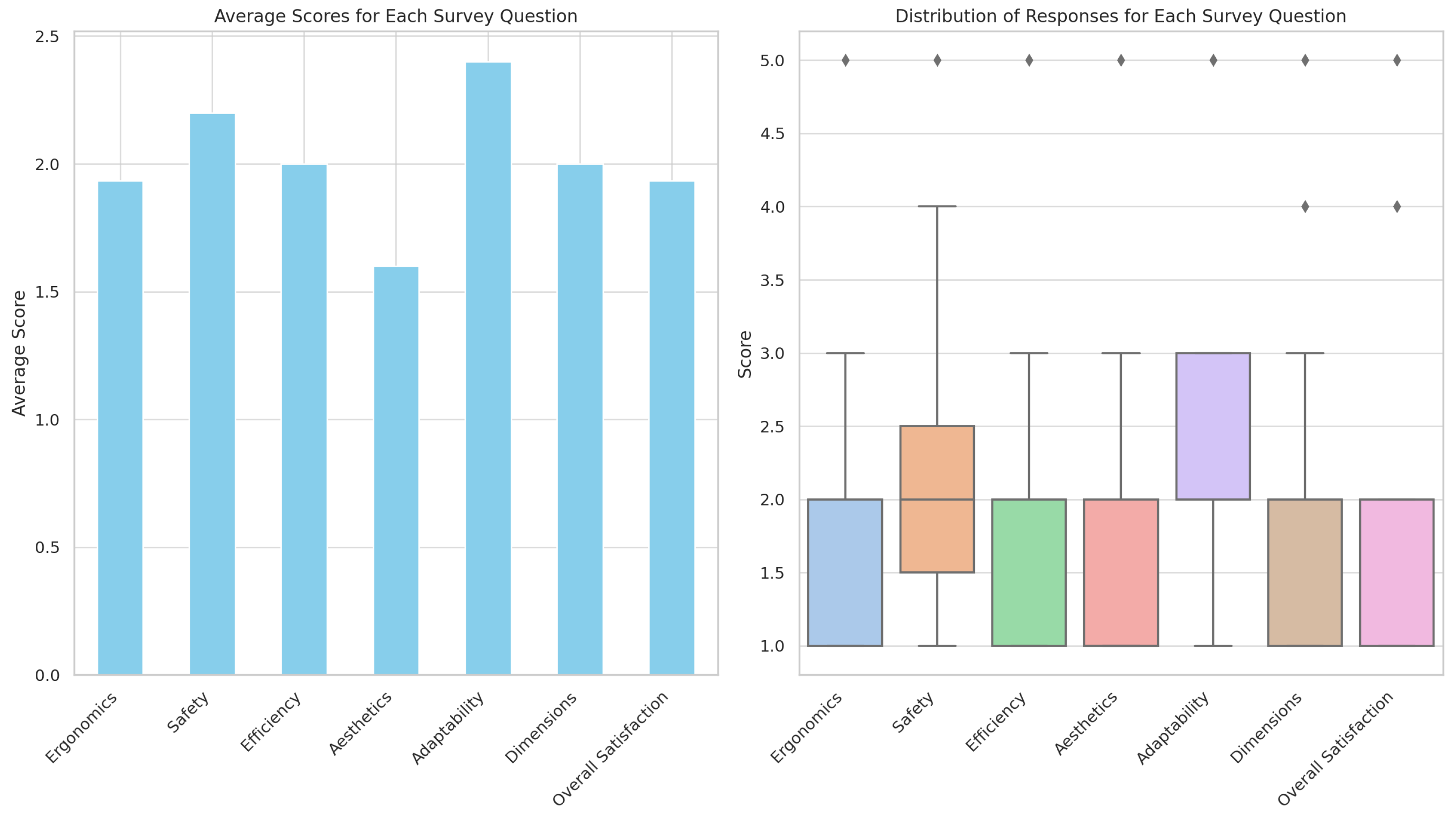
5.4. Survey on Acceptance and Usability of the Shadow Robot
- Ergonomic design: Is the robot designed ergonomically and comfortable for users?
- User safety: Does the design of the robot ensure user safety?
- Work efficiency: Does the robot enhance the efficiency of healthcare personnel’s work?
- Visual appeal: Is the robot’s design visually appealing?
- Adaptability to work environments: Does the robot’s design adapt well to different healthcare work environments?
- Dimensional suitability: Are the robot’s dimensions appropriate and do they meet the ergonomic needs of healthcare staff?
- Overall satisfaction: Are you generally satisfied with the design of the robot?
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Breazeal, C.L. Designing Sociable Robots; MIT press: Cambridge, MA, USA, 2004. [Google Scholar]
- Dautenhahn, K. Socially intelligent robots: Dimensions of human–robot interaction. Philos. Trans. R. Soc. B Biol. Sci. 2007, 362, 679–704. [Google Scholar] [CrossRef] [PubMed]
- Breazeal, C.; Takanishi, A.; Kobayashi, T. Social Robots that Interact with People. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1349–1369. [Google Scholar]
- Mahdi, H.; Akgun, S.A.; Saleh, S.; Dautenhahn, K. A survey on the design and evolution of social robots—Past, present and future. Robot. Auton. Syst. 2022, 156, 104193. [Google Scholar] [CrossRef]
- Wada, K.; Shibata, T.; Saito, T.; Tanie, K. Effects of robot-assisted activity for elderly people and nurses at a day service center. Proc. IEEE 2007, 92, 1780–1788. [Google Scholar] [CrossRef]
- Ragno, L.; Borboni, A.; Vannetti, F.; Amici, C.; Cusano, N. Application of social robots in healthcare: Review on characteristics, requirements, technical solutions. Sensors 2023, 23, 6820. [Google Scholar] [CrossRef]
- Manzi, F.; Peretti, G.; Di Dio, C.; Cangelosi, A.; Itakura, S.; Kanda, T.; Ishiguro, H.; Massaro, D.; Marchetti, A. A robot is not worth another: Exploring children’s mental state attribution to different humanoid robots. Front. Psychol. 2020, 11, 2011. [Google Scholar] [CrossRef] [PubMed]
- Egido-García, V.; Estévez, D.; Corrales-Paredes, A.; Terrón-López, M.J.; Velasco-Quintana, P.J. Integration of a social robot in a pedagogical and logopedic intervention with children: A case study. Sensors 2020, 20, 6483. [Google Scholar] [CrossRef] [PubMed]
- Reis, J.; Melão, N.; Salvadorinho, J.; Soares, B.; Rosete, A. Service robots in the hospitality industry: The case of Henn-na hotel, Japan. Technol. Soc. 2020, 63, 101423. [Google Scholar] [CrossRef]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef]
- Goodrich, M.A.; Schultz, A.C. Human-Robot Interaction: A Survey; Now Publishers Inc.: Norwell, MA, USA, 2008; Volume 1. [Google Scholar]
- Gibson, I.; Rosen, D.; Stucker, B. Additive Manufacturing Technologies; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Gupta, A.; Singh, V. A review of emerging technologies for rapid prototyping. In Proceedings of the 11th International Advances in Applied Physics and Materials Science Congress & Exhibition, Fethiye, Turkey, 17–21 October 2021; AIP Publishing: Melville, NY, USA, 2023. [Google Scholar]
- Sharma, A. (Ed.) Advances in 3D Printing; IntechOpen: London, UK, 2023. [Google Scholar]
- Yim, M.; Shen, W.M.; Salemi, B.; Rus, D.; Moll, M.; Lipson, H.; Klavins, E.; Chirikjian, G.S. Modular self-reconfigurable robot systems [grand challenges of robotics]. IEEE Robot. Autom. Mag. 2007, 14, 43–52. [Google Scholar] [CrossRef]
- Murata, S.; Kurokawa, H.; Kokaji, S. Self-reconfigurable robots. IEEE Robot. Autom. Mag. 2002, 14, 71–78. [Google Scholar] [CrossRef]
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Wengefeld, T.; Schuetz, B.; Girdziunaite, G.; Scheidig, A.; Gross, H.M. The morphia project: First results of a long-term user study in an elderly care scenario from robotic point of view. In Proceedings of the ISR Europe 2022, 54th International Symposium on Robotics, VDE, Munich, Germany, 20–21 June 2022; pp. 1–8. [Google Scholar]
- PALROBOTICS. TIAGO. 2023. Available online: https://pal-robotics.com/es/robots/tiago/ (accessed on 24 June 2024).
- Honda. WaPOCHI. 2022. Available online: https://global.honda/jp/stories/046/ (accessed on 24 June 2024).
- KEENON. DinerbotT5. 2022. Available online: https://www.keenonrobot.com/EN/index/Page/index/catid/6.html (accessed on 24 June 2024).
- PUDU. Bellabot. 2023. Available online: https://www.pudurobotics.com/es/products/bellabot (accessed on 24 June 2024).
- experthubrobotics. AmyWaitress. 2023. Available online: https://experthubrobotics.com/premium-robots/csj/amy-waitress (accessed on 24 June 2024).
- Fischinger, D.; Einramhof, P.; Wohlkinger, W.; Papoutsakis, K.; Mayer, P.; Panek, P.; Koertner, T.; Hofman, S.; Argyros, A.; Vincze, M.; et al. HOBBIT—The Mutual Care Robot. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2013), Tokyo, Japan, 3–8 November 2013. [Google Scholar]
- Bajones, M.; Fischinger, D.; Weiss, A.; Wolf, D.; Vincze, M.; de la Puente, P.; Körtner, T.; Weninger, M.; Papoutsakis, K.; Michel, D.; et al. Hobbit: Providing fall detection and prevention for the elderly in the real world. J. Robot. 2018, 2018, 1754657. [Google Scholar] [CrossRef]
- González-Jiménez, J.; Galindo, C.; Ruiz-Sarmiento, J. Technical improvements of the Giraff telepresence robot based on users’ evaluation. In Proceedings of the 2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012; pp. 827–832. [Google Scholar] [CrossRef]
- Chebotareva, E.; Magid, E.; Carballo, A.; Hsia, K.H. Basic User Interaction Features for Human-Following Cargo Robot TIAGo Base. In Proceedings of the 2020 13th International Conference on Developments in eSystems Engineering (DeSE), Virtual Conference, 14–17 December 2020; pp. 206–211. [Google Scholar] [CrossRef]
- Megalingam, R.K.; Naick, V.S.; Manoharan, S.K.; Sivananthan, V. Analysis of Tiago Robot for Autonomous Navigation Applications. In Proceedings of the 2021 Second International Conference on Electronics and Sustainable Communication Systems (ICESC), Coimbatore, India, 4–6 August 2021; pp. 257–261. [Google Scholar] [CrossRef]
- Palacín, J.; Rubies, E.; Clotet, E. The Assistant Personal Robot Project: From the APR-01 to the APR-02 Mobile Robot Prototypes. Designs 2022, 6, 66. [Google Scholar] [CrossRef]
- UNE56801-2008; UNE 56801:2008: Unidad de Hueco de Puerta de Madera. Terminología, Definiciones y Clasificación. AENOR: Madrid, España, 2008.
- Guillén-Ruiz, S.; Bandera, J.P.; Hidalgo-Paniagua, A.; Bandera, A. Evolution of Socially-Aware Robot Navigation. Electronics 2023, 12, 1570. [Google Scholar] [CrossRef]
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots, 2nd ed.; Intelligent Robotics and Autonomous Agents; MIT Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Ebert-Uphoff, I.; Gosselin, C.M.; Rosen, D.W.; Laliberte, T. Rapid prototyping for robotics. In Cutting Edge Robotics; IntechOpen: London, UK, 2005; pp. 17–46. [Google Scholar]
- Lynch, K.M.; Park, F.C. Modern Robotics: Mechanics, Planning, and Control, 1st ed.; Cambridge University Press: New York, NY, USA, 2017. [Google Scholar]
- Maulana, E.; Muslim, M.A.; Hendrayawan, V. Inverse kinematic implementation of four-wheels mecanum drive mobile robot using stepper motors. In Proceedings of the 2015 International Seminar on Intelligent Technology and Its Applications, ISITIA 2015—Proceeding, Surabaya, Indonesia, 20–21 May 2015; pp. 51–55. [Google Scholar] [CrossRef]
- Manso, L.; Bachiller, P.; Bustos, P.; Núñez, P.; Cintas, R.; Calderita, L. RoboComp: A Tool-Based Robotics Framework. In Simulation, Modeling, and Programming for Autonomous Robots: Second International Conference, SIMPAR 2010, Darmstadt, Germany, 15–18 November 2010; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6472 LNAI. [Google Scholar] [CrossRef]
- García García, J.C.; Núñez Trujillo, P.M.; Bachiller Burgos, P.; Bustos García, P. Towards the design of efficient and versatile cognitive robotic architecture based on distributed, low-latency working memory. In Proceedings of the IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC 2022), Santa Maria da Faira, Portugal, 29–30 April 2022. [Google Scholar]
- Pérez, G.; Zapata-Cornejo, N.; Bustos, P.; Núñez, P. Social Elastic Band with Prediction and Anticipation: Enhancing Real-Time Path Trajectory Optimization for Socially Aware Robot Navigation. Int. J. Soc. Robot. 2024. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature/Robots | Shadow | Morphia [19] | TIAGo [20] | WaPOCHI [21] | Dinerbot T5 [22] | Bellabot [23] | Amy Waitress [24] | Hobbit [25,26] | Giraff |
|---|---|---|---|---|---|---|---|---|---|
| Omnidirectional movement | ✓ | × | ∼ | × | × | × | × | × | × |
| Autonomous Navigation | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Detection of people | ✓ | ✓ | ✓ | ✓ | × | × | × | ✓ | ✓ |
| Object Manipulation | ∼ | × | ∼ | × | × | × | × | ✓ | × |
| Video Calling | × | ✓ | ∼ | × | × | × | × | ✓ | ✓ |
| Transportation | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Tracking | ✓ | ✓ | ✓ | ✓ | × | × | × | ✓ | ✓ |
| Expansible | ✓ | × | ∼ | × | × | × | × | × | ∼ |
| Low-cost focus | ✓ | ✓ | × | × | × | ✓ | ✓ | ✓ | ✓ |
| Battery | Motors | Control | Supply | Supply | Supply | Supply | Supply | |
|---|---|---|---|---|---|---|---|---|
| Voltage | 48 V | 48 V | 24 V | 48 V | 24 V | 19 V | 12 V | 5 V |
| Max. current | 22 A | 13 A | 5 A | 20 A | 10 A | 10 A | 10 A | 10 A |
| Speed/Movement | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Linear (y-axis) speed (mm/s) | 300 | 0 | 0 | 0 | −800 | 0 | 0 | 0 | 300 | −800 | 0 |
| Side (x-axis) speed (mm/s) | 0 | 0 | 300 | 0 | 0 | 0 | −800 | 0 | 300 | −800 | 0 |
| Rotational speed (rad/s) | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 0.5 | 0 | 0 | 0.5 |
| Execution time (s) | 10 | 6.25 | 10 | 1.25 | 3.75 | 6.25 | 3.75 | 0.25 | 5 | 3.75 | 1.25 |
| Parameter | Spring 1 | Spring 2 |
|---|---|---|
| Step | 9.5 mm | 6.06 mm |
| Useful spires | 10 | 16.5 |
| Wire diameter | 1.25 mm | 2 mm |
| Length | 100 mm | 100 mm |
| Constant k | 468 N/m | 1288 N/m |
| Materials | INOX-AISI 302 | INOX-AISI 302 |
| System/Axis | X | Y | Z |
|---|---|---|---|
| Damping system with 468 N/m springs | 64.31% | 10.94% | 118.02% |
| Damping system with 1288 N/m springs | 90.1% | 129.87% | 333.31% |
| Metric | Mean | Variance |
|---|---|---|
| Smoothness | 4.45 | 0.26 |
| Naturalness | 4.50 | 0.26 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torrejón, A.; Zapata, N.; Bonilla, L.; Bustos, P.; Núñez, P. Design and Development of Shadow: A Cost-Effective Mobile Social Robot for Human-Following Applications. Electronics 2024, 13, 3444. https://doi.org/10.3390/electronics13173444
Torrejón A, Zapata N, Bonilla L, Bustos P, Núñez P. Design and Development of Shadow: A Cost-Effective Mobile Social Robot for Human-Following Applications. Electronics. 2024; 13(17):3444. https://doi.org/10.3390/electronics13173444
Chicago/Turabian StyleTorrejón, Alejandro, Noé Zapata, Lucas Bonilla, Pablo Bustos, and Pedro Núñez. 2024. "Design and Development of Shadow: A Cost-Effective Mobile Social Robot for Human-Following Applications" Electronics 13, no. 17: 3444. https://doi.org/10.3390/electronics13173444
APA StyleTorrejón, A., Zapata, N., Bonilla, L., Bustos, P., & Núñez, P. (2024). Design and Development of Shadow: A Cost-Effective Mobile Social Robot for Human-Following Applications. Electronics, 13(17), 3444. https://doi.org/10.3390/electronics13173444