
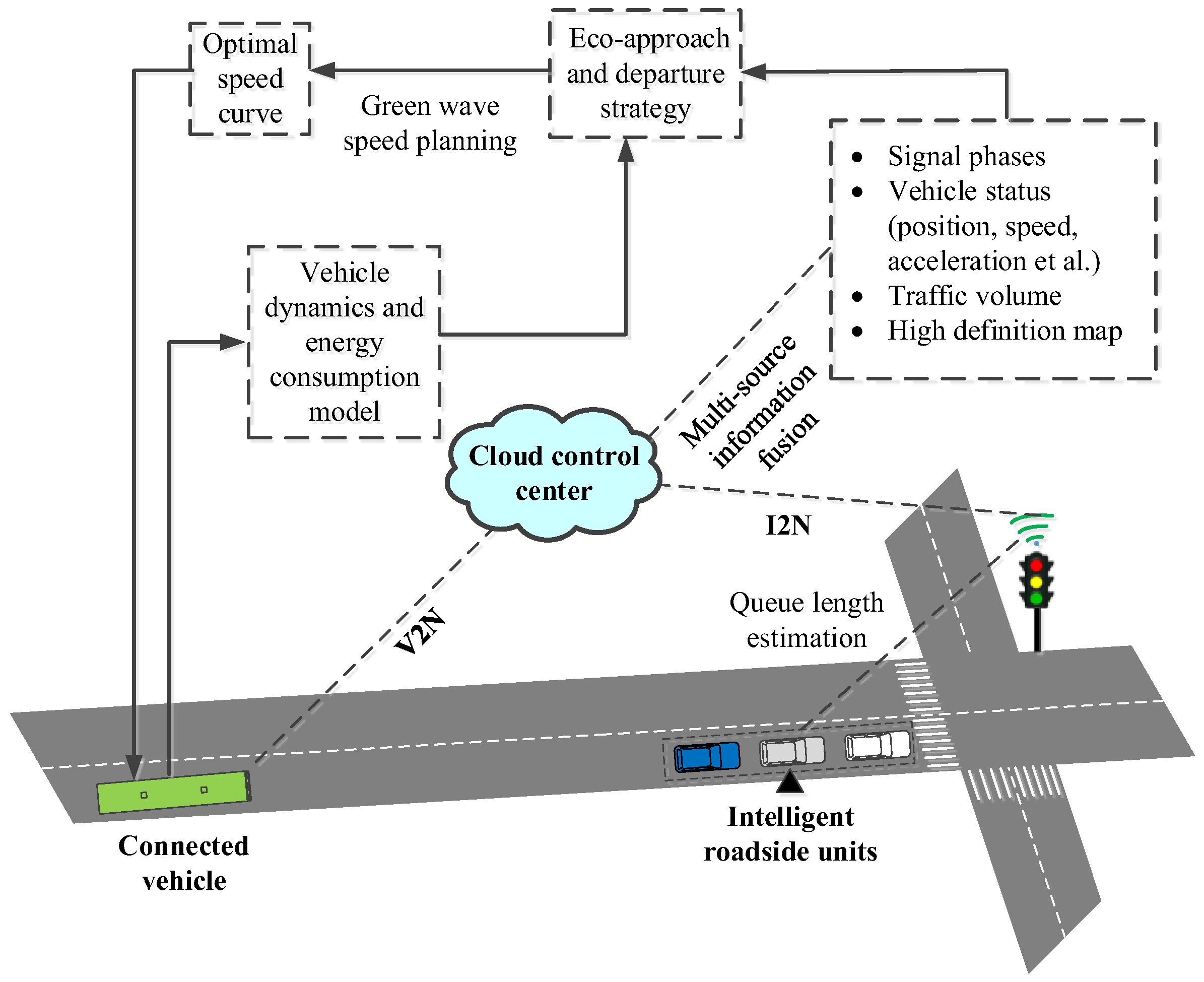
A Green Wave Ecological Global Speed Planning under the Framework of Vehicle–Road–Cloud Integration


Abstract
:1. Introduction
2. Related Works
2.1. Green Wave Speed Planning
2.2. Ecological Speed Planning
3. Methodology
3.1. Assumptions
- The study only focused on controlling the speed of connected vehicles, and the signal phases were already in an optimal state. To simplify the calculation, the signal phase and time cycle at the same intersection were fixed and unchanged;
- The study only considered the queue length of other social vehicles as influencing factors, without taking into account the operation influences of other non-connected vehicles and non-motorized vehicles in the road sections during driving;
- The study only considered that vehicles pass through the multiple intersections directly, without considering lane changing and overtaking behaviors;
- Communication delays were ignored when transmitting information between connected vehicles, roadside units, and cloud control platforms, and there were no information losses.
3.2. Energy Consumption Model
3.2.1. Instantaneous Energy Consumption Model
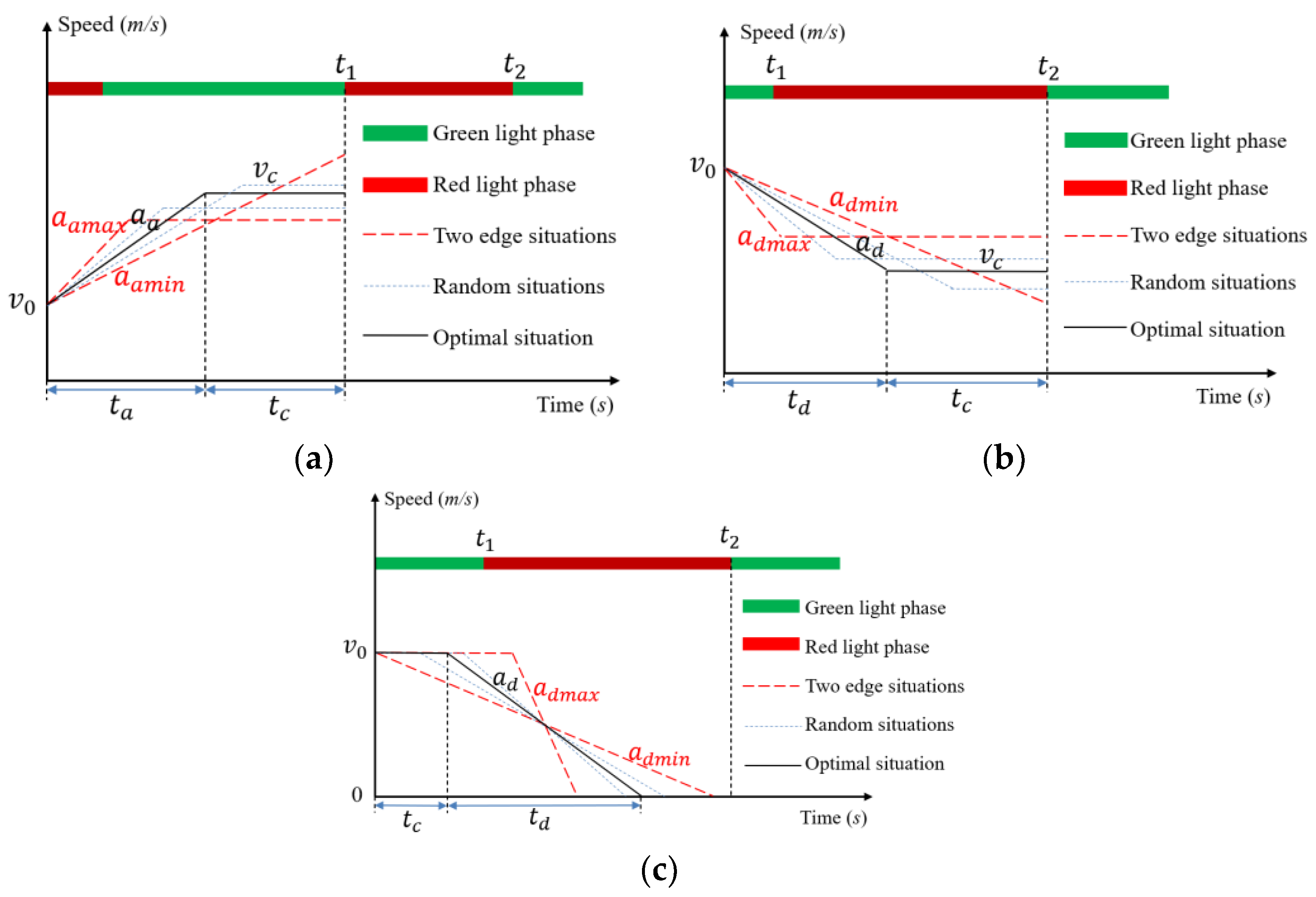
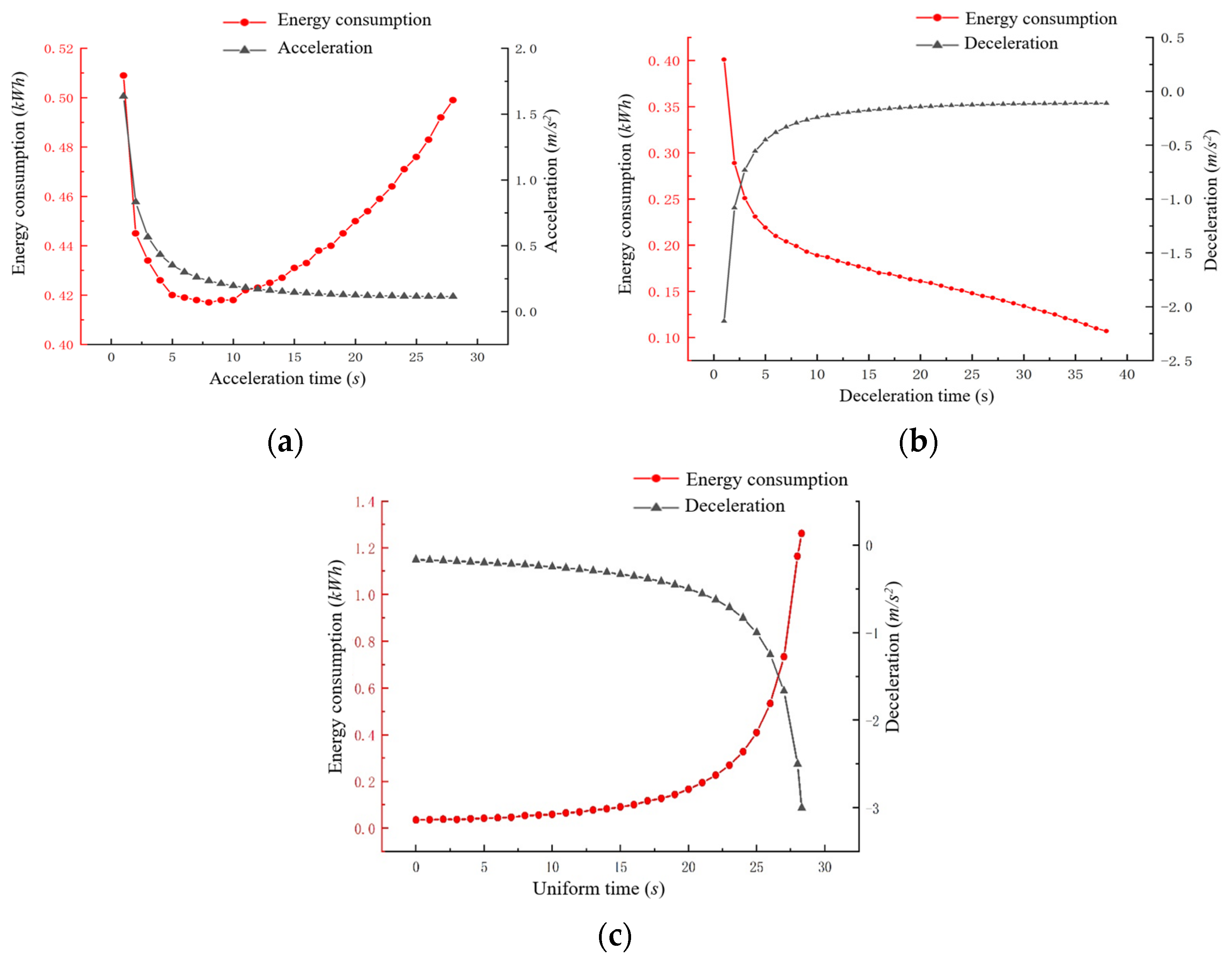
3.2.2. Optimal Energy Consumption Model under Different Scenarios
3.3. Isolated-Intersection-Based Eco-Approach and Departure Strategy (I-EAD)
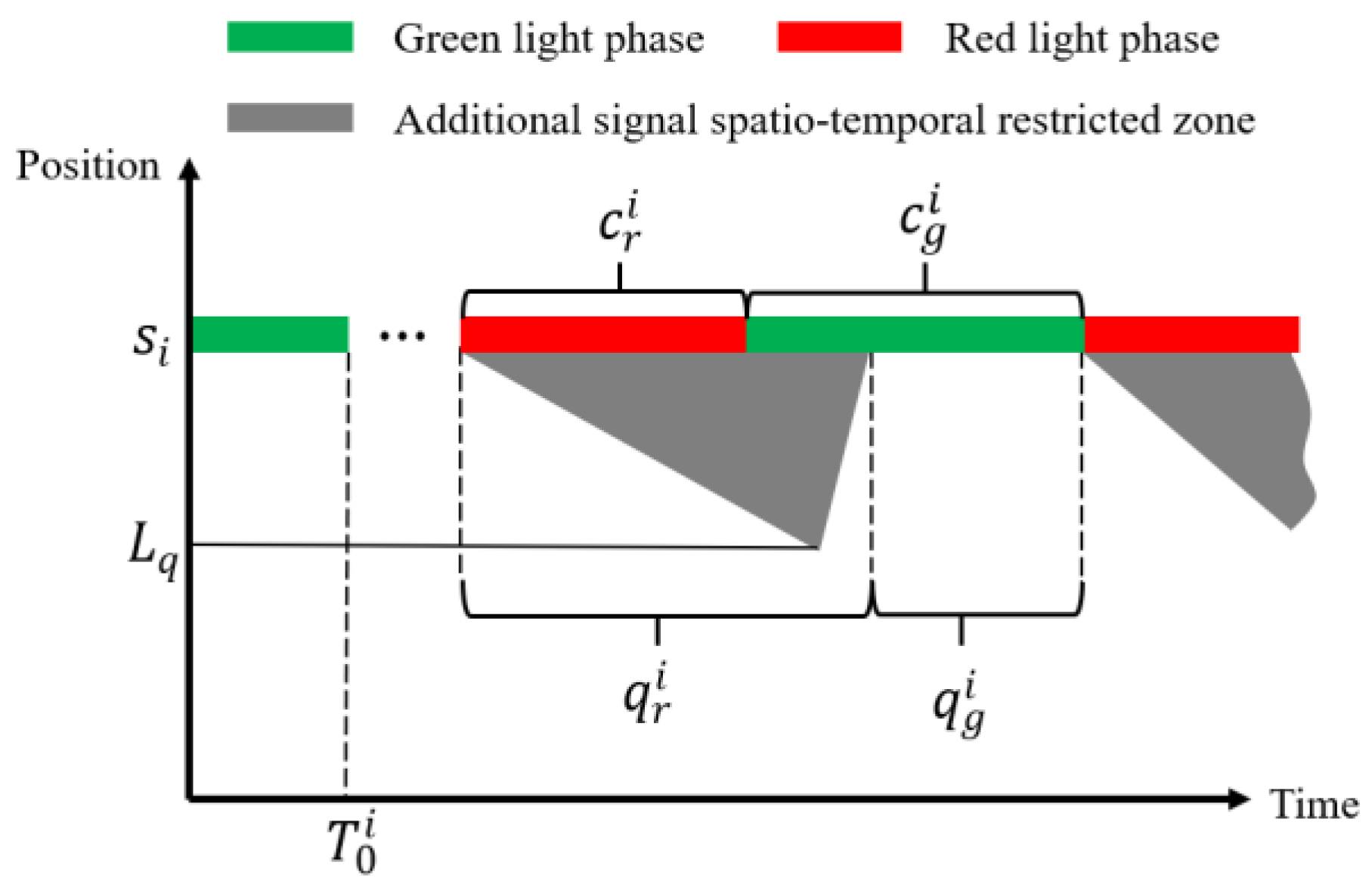
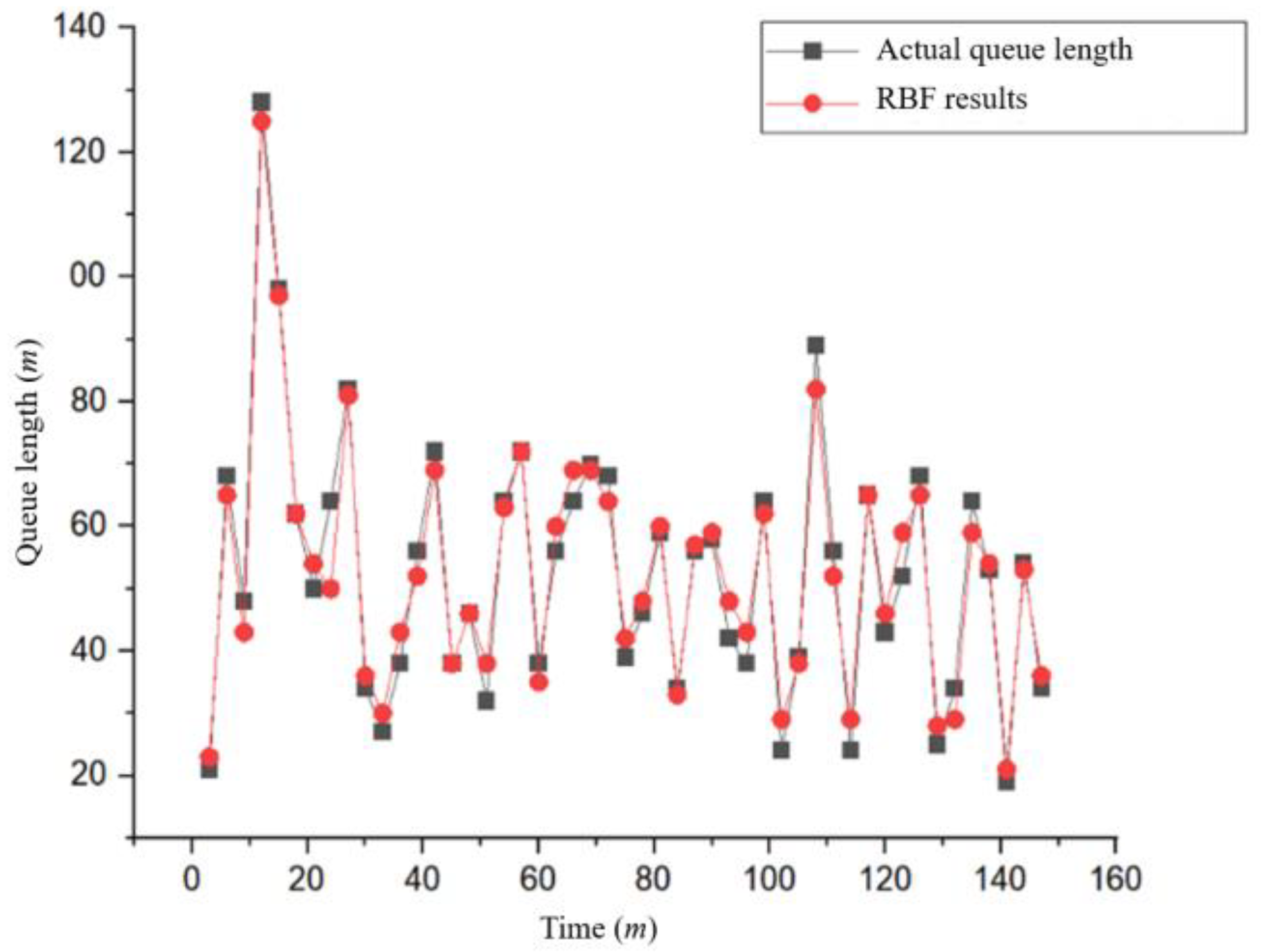
3.3.1. Estimation of Queue Length
3.3.2. Valid Traffic Signal Model
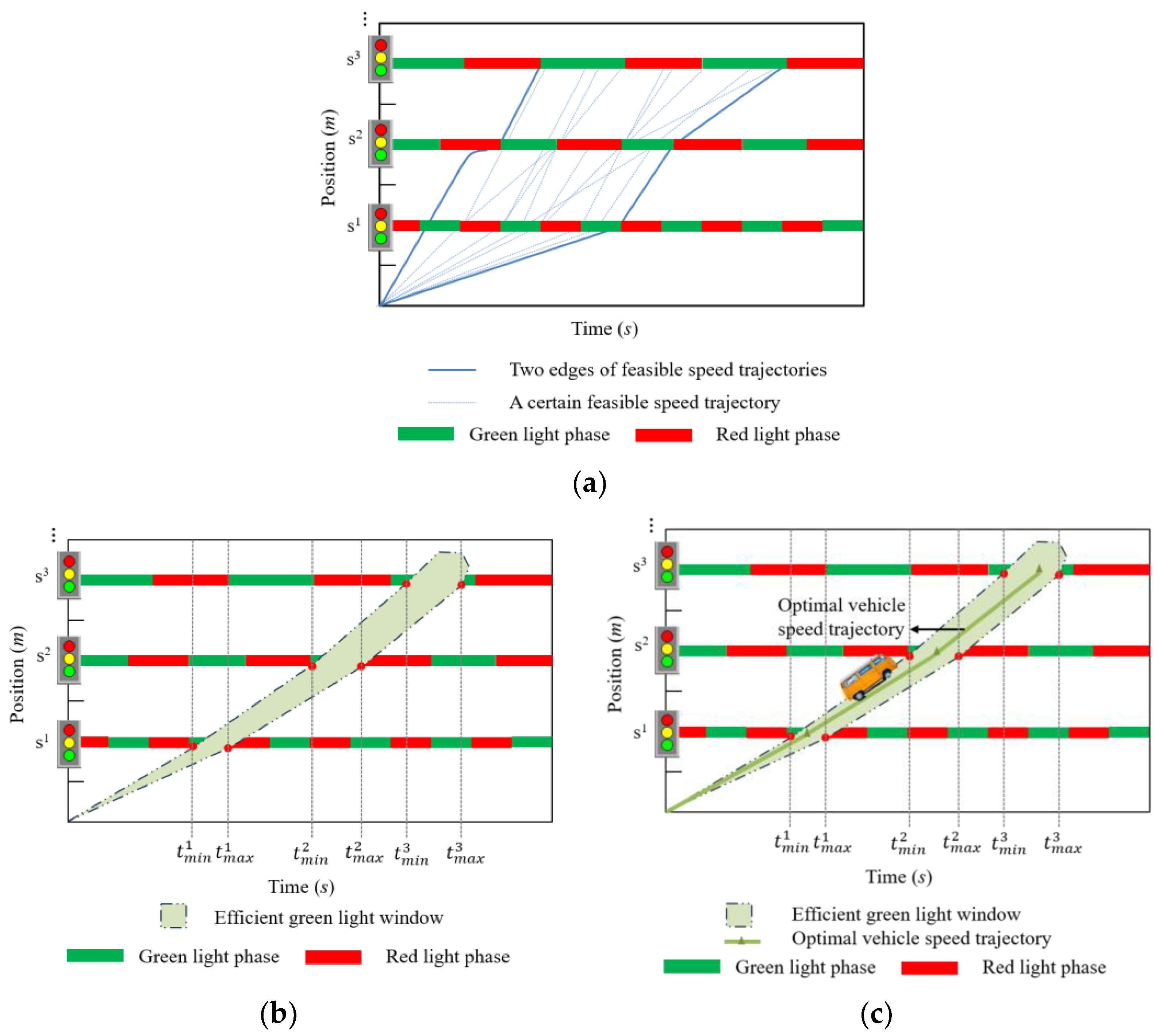
3.4. Multi-Intersections-Based Eco-Approach and Departure Strategy (M-EAD)
3.4.1. Efficient Green Light Window Model
3.4.2. Optimal Vehicle Speed Trajectory Model
4. Simulation Results
4.1. Energy Consumption Model Results under Different Scenarios
4.2. Estimation Result of Queue Length
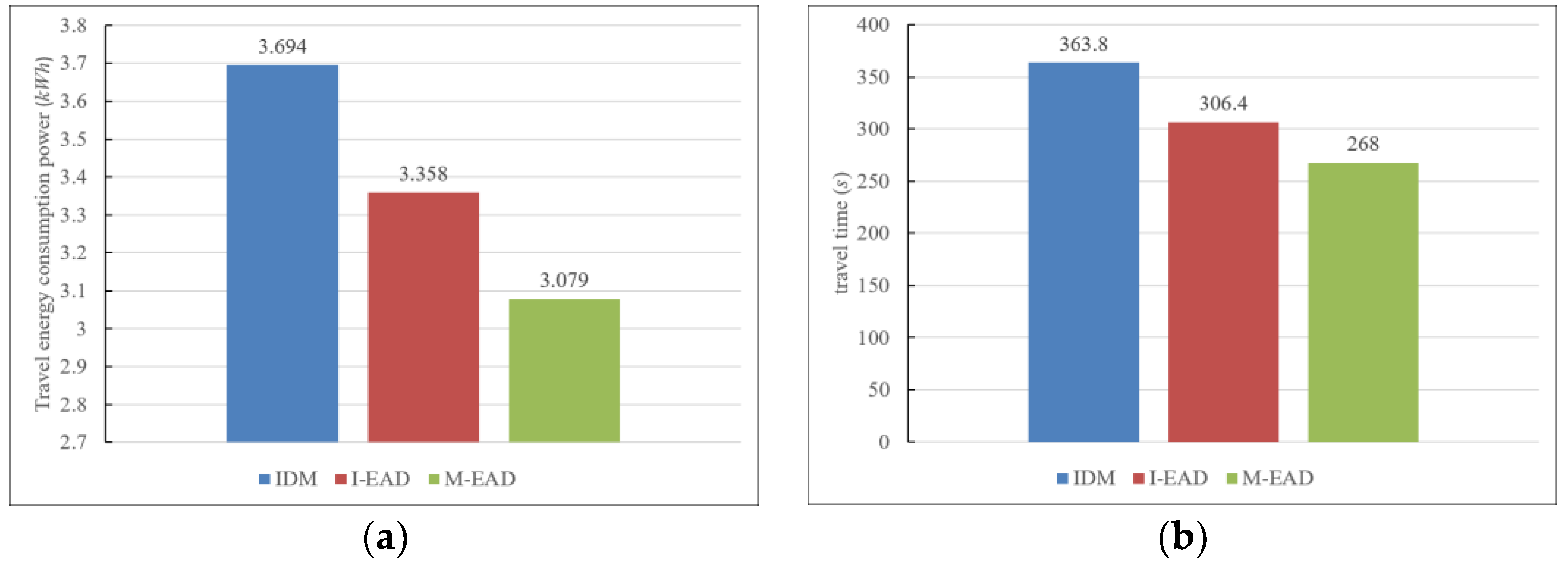
4.3. Comparison Results of Speed Planning Strategies
- The intelligent driver model (IDM) mentioned in reference [41] was used as the basic method for simulation in the study. On the SUMO platform, an IDM car-following model could be used directly, simulating the process of drivers operating based on their experience without speed planning. By comprehensively considering factors such as safe distance between vehicles, speed difference, and expected speed, the corresponding acceleration was calculated to describe the driver’s behavior, thereby achieving an adaptive cruise control strategy and safe car-following model;
- The isolated-intersection-based eco-approach and departure (I-EAD) strategy was used for speed planning, and then the IDM strategy was used for the car-following process when the main vehicle was influenced by the preceding vehicle;
- The multi-intersections-based eco-approach and departure (M-EAD) strategy was used for speed planning, and then the IDM strategy was also used for the car-following process;
4.4. Random Traffic Scenario Verification
5. Conclusions
- Previous scholars have mostly researched green wave speed induction strategies for fuel vehicles, using the fuel consumption model to construct fuel consumption optimization objective functions. With the development of the automotive vehicle industry, most connected autonomous vehicles are pure electric vehicles. Therefore, electric vehicles were selected as the research object. An instantaneous energy consumption model for electric vehicles using power balance equations was established, and the optimal consumption model was calculated using acceleration, deceleration, and stopping scenarios.
- Previous scholars often only considered signal constraints and did not take into account the impact of the queue length of social vehicles. A radial basis function neural network model and a valid traffic signal model were proposed to estimate the effect of queue length of traffic flow during the green light time at signalized intersections. The I-EAD strategy reduces average energy consumption by 9.10% and average travel time by 15.78%, respectively, compared to the IDM model.
- A two-stage, multi-intersections-based eco-approach and departure strategy was established to solve the problem of an efficient green light window and the optimal vehicle speed trajectory. Compared to IDM and I-EAD strategies, the M-EAD strategy reduces average travel energy consumption by 16.65% and 8.31% and the average travel time by 26.33% and 12.53%, respectively.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Simchon, L.; Rabinovici, R. Real-Time Implementation of Green Light Optimal Speed Advisory for Electric Vehicles. Vehicles 2020, 2, 35–54. [Google Scholar] [CrossRef]
- Li, K.; Dai, Y.; Li, S.; Bian, M. State-of-the-art and technical trends of intelligent and connected vehicles. J. Automot. Saf. Energy 2017, 8, 1. [Google Scholar]
- Lin, H.; Liu, Y.; Li, S.; Qu, X. Research progress on key technologies of vehicle road collaboration system. J. South China Univ. Technol. (Nat. Sci. Ed.) 2023, 51, 46–67. [Google Scholar]
- Cheng, Z.Q.; Dai, Q.; Li, S.Y.; Teruko, M.; Alexander, H. GSRFormer: Grounded Situation Recognition Transformer with Alternate Semantic Attention Refinement. In Proceedings of the MM ‘22: The 30th ACM International Conference on Multimedia, Portugal, Lisbon, 10–14 October 2022. [Google Scholar]
- Alalewi, A.; Dayoub, I.; Cherkaoui, S. On 5G-V2X Use Cases and Enabling Technologies: A Comprehensive Survey. IEEE Access 2021, 9, 107710–107737. [Google Scholar] [CrossRef]
- Amendola, D.; Cordeschi, N.; Bai, F.; Ji, Y.S.; Yan, S.; Zhuang, W.H. Guest Editorial Special Issue on 5G/6G Precise Positioning on Cooperative Intelligent Transportation Systems (C-ITS) and Connected Automated Vehicles (CAV)-Part I. IEEE J. Sel. Areas Commun. 2023, 41, 3713–3718. [Google Scholar] [CrossRef]
- Kuru, K.; Khan, W. A Framework for the Synergistic Integration of Fully Autonomous Ground Vehicles With Smart City. IEEE Access 2021, 9, 923–948. [Google Scholar] [CrossRef]
- Li, K.; Li, J.; Chang, X.; Gao, B.; Xu, Q.; Li, S. Principles and typical applications of cloud control system for intelligent and connected vehicles. J. Automot. Saf. Energy 2020, 11, 261. [Google Scholar]
- Arthurs, P.; Gillam, L.; Krause, P.; Wang, N.; Halder, K.; Mouzakitis, A. A Taxonomy and Survey of Edge Cloud Computing for Intelligent Transportation Systems and Connected Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6206–6221. [Google Scholar] [CrossRef]
- Kodi, J.H.; Kidando, E.; Sando, T.; Alluri, P. Estimating the Mobility Benefits of Adaptive Signal Control Technology Using a Bayesian Switch-Point Regression Model. J. Transp. Eng. A Syst. 2022, 148, 5. [Google Scholar] [CrossRef]
- Shams, A.; Mahmud, S.; Day, C.M. Comparison of Flow- and Bandwidth-Based Methods of Traffic Signal Offset Optimization. J. Transp. Eng. A Syst. 2023, 149, 5. [Google Scholar] [CrossRef]
- Yang, L.; Zhao, X.; Wu, G.; Xu, Z.; Matthew, B.; Hui, F.; Hao, P.; Han, M.; Zhao, Z.; Fang, S.; et al. Review on connected and automated vehicles based cooperative eco-driving strategies. J. Traffic Transp. Eng. 2020, 20, 58–72. [Google Scholar]
- HomChaudhuri, B.; Vahidi, A.; Pisu, P. Fast model predictive control-based fuel efficient control strategy for a group of connected vehicles in urban road conditions. IEEE Trans. Control Syst. Technol. 2017, 25, 760–767. [Google Scholar] [CrossRef]
- HomChaudhuri, B.; Vahidi, A.; Pisu, P. A Fuel Economic Model Predictive Control Strategy for a Group of Connected Vehicles in Urban Roads. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015. [Google Scholar]
- Ala, M.V.; Yang, H.; Rakha, H. Modeling evaluation of eco–cooperative adaptive cruise control in vicinity of signalized intersections. Transp. Res. Rec. 2016, 2559, 108–119. [Google Scholar] [CrossRef]
- Yang, H.; Rakha, H.; Ala, M.V. Eco-cooperative adaptive cruise control at signalized intersections considering queue effects. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1575–1585. [Google Scholar] [CrossRef]
- Altan, O.D.; Wu, G.; Barth, M.J.; Boriboonsomsin, K.; Stark, J.A. GlidePath: Eco-friendly automated approach and departure at signalized intersections. IEEE Trans. Intell. Veh. 2017, 2, 266–277. [Google Scholar] [CrossRef]
- Ye, F.; Hao, P.; Qi, X.; Wu, G.; Boriboonsomsin, K.; Barth, M. Prediction-based eco-approach and departure at signalized intersections with speed forecasting on preceding vehicles. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1378–1389. [Google Scholar] [CrossRef]
- Kari, D.; Wu, G.; Barth, M.J. Eco-friendly freight signal priority using connected vehicle technology: A multi-agent systems approach. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Dearborn, MI, USA, 8–11 June 2014. [Google Scholar]
- Wu, W.; Huang, L.; Du, R. Simultaneous optimization of vehicle arrival time and signal timings within a connected vehicle environment. Sensors 2019, 20, 191. [Google Scholar] [CrossRef]
- Liu, B.; Sun, C.; Wang, B.; Sun, F. Adaptive speed planning of connected and automated vehicles using multi-light trained deep reinforcement learning. IEEE Trans. Veh. Technol. 2021, 71, 3533–3546. [Google Scholar] [CrossRef]
- Wang, Q.Z.; Gong, Y.B.; Yang, X.F. Connected automated vehicle trajectory optimization along signalized arterial: A decentralized approach under mixed traffic environment. Transp. Res. Part. C Emerg. Technol. 2022, 145, 103918. [Google Scholar] [CrossRef]
- Talukder, M.A.S.; Lidbe, A.D.; Tedla, E.G.; Hainen, A.M.; Atkison, T. Trajectory-Based Signal Control in Mixed Connected Vehicle Environments. J. Transp. Eng. A Syst. 2021, 147, 5. [Google Scholar] [CrossRef]
- Shams, A.; Day, C.M. Advanced Gap Seeking Logic for Actuated Signal Control Using Vehicle Trajectory Data: Proof of Concept. Transp. Res. Rec. 2023, 2677, 610–623. [Google Scholar] [CrossRef]
- Dong, H.; Zhuang, W.; Chen, B.; Yin, G.; Wang, Y. Enhanced eco-approach control of connected electric vehicles at signalized intersection with queue discharge prediction. IEEE Trans. Veh. Technol. 2021, 70, 5457–5469. [Google Scholar] [CrossRef]
- Zhang, C.; Len, J.; Wang, B.; Sun, C.; Zhou, X. An Eco-Driving Method with Queue Length Estimation for Connected Vehicles. Trans. Beijing Inst. Technol. 2022, 42, 1256–1263. [Google Scholar]
- Chen, Z.; Zhang, J.; Xiong, S.; Su, Z.; Hu, J.; Wu, C. A Review on Research Status and Trends of Eco-driving on Intelligent Connected Vehicles. J. Transp. Inf. Saf. 2022, 40, 13–25. [Google Scholar]
- Bautista-Montesano, R.; Galluzzi, R.; Mo, Z.B.; Fu, Y.J.; Bustamante-Bello, R.; Di, X. Longitudinal Control Strategy for Connected Electric Vehicle with Regenerative Braking in Eco-Approach and Departure. Appl. Sci. 2023, 13, 5089. [Google Scholar] [CrossRef]
- Jin, H.; Niu, R. Economic Speed Planning Based on A-Star Algorithm for Intelligent Vehicle in Traffic Light Intersection. Trans. Beijing Inst. Technol. 2023, 43, 595–601. [Google Scholar]
- Meng, Z.; Qiu, Z. A Study of Eco-driving Strategy at Signalized Intersections. J. Transp. Inf. Saf. 2018, 36, 76–84+92. [Google Scholar]
- Liu, H.; Kurzhanskiy, A.A.; Hong, W.S.; Lu, X.Y. Integrating vehicle trajectory planning and arterial traffic management to facilitate eco-approach and departure deployment. J. Intell. Transp. Syst. 2024. [Google Scholar] [CrossRef]
- Dong, H.X.; Zhuang, W.C.; Wu, G.Y.; Li, Z.J.; Yin, G.D.; Song, Z.Y. Overtaking-Enabled Eco-Approach Control at Signalized Intersections for Connected and Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2024, 25, 4527–4539. [Google Scholar] [CrossRef]
- Goyal, V. Development and Validation of Dynamic Programming Algorithm for Eco Approach and Departure. Master’s Thesis, Michigan Technological University, Houghton, MI, USA, 2021. [Google Scholar]
- Yang, J.S.; Zhao, D.Z.; Jiang, J.J.; Lan, J.L.; Mason, B.; Tian, D.X.; Li, L. A Less-Disturbed Ecological Driving Strategy for Connected and Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 8, 413–424. [Google Scholar] [CrossRef]
- Han, J.H.; Rios-Torres, J. Fast Analytical Solver for Fuel-Optimal Speed Trajectory of Connected and/or Automated Vehicles. IEEE Trans. Control Syst. Technol. 2023, 31, 2714–2727. [Google Scholar] [CrossRef]
- Rakha, H.A.; Kamalanathsharma, R.K.; Ahn, K. AERIS: Eco-Vehicle Speed Control at Signalized Intersections Using I2V Communication; Joint Program Office for Intelligent Transportation Systems: Washington, DC, USA, 2012. [Google Scholar]
- Wang, X.; Shao, H. The Theory of RBF Neural Network and Its Application in Control. Inf. Control 1997, 26, 272–284. [Google Scholar]
- Dong, H. Dynamic Optimization of Ecological Driving Speed For Intelligent and Connected Vehicle at Signalized Intersections. Ph.D. Thesis, Southeast University, Nanjing, China, August 2022. [Google Scholar]
- Efroni, Y.; Tomar, M.; Ghavamzadeh, M. Multi-step Greedy Policies in Model-Free Deep Reinforcement Learning. In Proceedings of the ICLR 2020 Conference, Yasyabeba, Ethiopia, 30 April 2020. [Google Scholar]
- Zhang, Q.; Miao, J.; Zhang, Z.; Yu, F.; Fu, F.; Wu, T. Energy-Efficient Video Streaming in UAV-Enabled Wireless Networks: A Safe-DQN Approach. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020. [Google Scholar]
- Sun, C.; Guanetti, J.; Borrelli, F.; Moura, S. Optimal Eco-Driving Control of Connected and Autonomous Vehicles Through Signalized Intersections. IEEE Internet Things J. 2020, 7, 3759–3773. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Intersection | Distance (m) | Greenlight Time (s) | Cycle Time (s) | Traffic Volume (veh/h) | Speed Limitations/km/h | |
|---|---|---|---|---|---|---|
| Maximum | Minimum | |||||
| S1 | 325 | 45 | 90 | 750 | 60 | 20 |
| S2 | 895 | 30 | 90 | 1056 | 60 | 20 |
| S3 | 1300 | 45 | 90 | 978 | 60 | 20 |
| S4 | 2400 | 38 | 90 | 1152 | 60 | 20 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| vehicle length (m) | 12 | frontal area (m2) | 7.55 |
| total weight (kg) | 18,000 | wind resistance coefficient | 0.67 |
| curb weight (kg) | 10,650 | rolling resistance coefficient | 0.02 |
| passengers/seats | 79/29 | conversion coefficient of rotating mass | 1.04 |
| rated power of motor (kW) | 120 | transmission ratio of the transmission system | 6.33 |
| peak power of motor (kW) | 240 | rolling radius of the wheel (m) | 0.54 |
| maximum torque of motor (Nm) | 2800 | wheelbase (m) | 6 |
| energy consumption per additional unit mass Ekg (Wh/km·kg) | 0.161 | ||
| Strategies | Travel Energy Consumption | Travel Time | Energy Consumption Reduction | Travel Time Reduction | ||
|---|---|---|---|---|---|---|
| IDM | I-EAD | IDM | I-EAD | |||
| IDM | 3.19 kwh | 314.7 s | - | - | - | - |
| I-EAD | 2.75 kwh | 227.8 s | 13.79% | - | 27.61% | - |
| M-EAD | 2.49 kwh | 199.8 s | 21.94% | 9.45% | 36.51% | 12.29% |
| Strategy | Average Reduction | |
|---|---|---|
| Energy Consumption | Travel Time | |
| I-EAD strategy compared to IDM strategy | 9.10% | 15.78% |
| M-EAD strategy compared to IDM strategy | 16.65% | 26.33% |
| M-EAD strategy compared to I-EAD strategy | 8.31% | 12.53% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Ji, X.; Yuan, S.; Fang, Z.; Liu, Z.; Gao, J. A Green Wave Ecological Global Speed Planning under the Framework of Vehicle–Road–Cloud Integration. Electronics 2024, 13, 3516. https://doi.org/10.3390/electronics13173516
Li Z, Ji X, Yuan S, Fang Z, Liu Z, Gao J. A Green Wave Ecological Global Speed Planning under the Framework of Vehicle–Road–Cloud Integration. Electronics. 2024; 13(17):3516. https://doi.org/10.3390/electronics13173516
Chicago/Turabian StyleLi, Zhe, Xiaolei Ji, Shuai Yuan, Zengli Fang, Zhennan Liu, and Jianping Gao. 2024. "A Green Wave Ecological Global Speed Planning under the Framework of Vehicle–Road–Cloud Integration" Electronics 13, no. 17: 3516. https://doi.org/10.3390/electronics13173516