


Station for Tuning and Testing Digital Twin in Hydraulic Actuator Control Systems under Programmable Load—Methodology, Design, and Tests

Abstract
:1. Introduction
1.1. Control of Electro-Hydraulic Positioning Systems
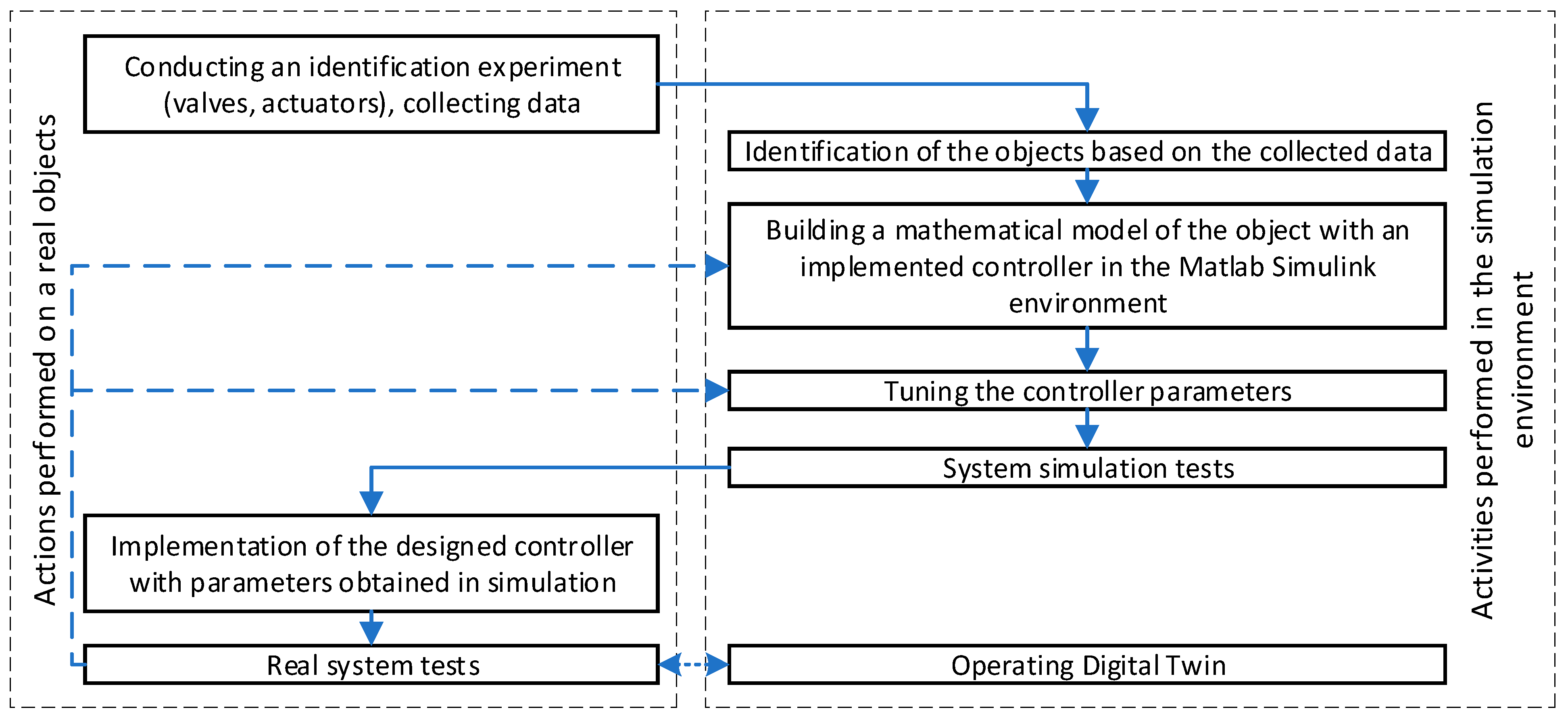
1.2. Goals and Approaches
- Methodology of development of the project—concept development, modeling, simulation, and construction of a station allowing for setting a programmable variable load for the tested hydraulic actuator position control system;
- Tests and calibration of the station—design and construction of an example of the tested system that can be researched on the station (modeling, simulation of the hydraulic actuator position control system under programmable load with disturbances, using various control algorithms);
- Hardware tests of the laboratory station in order to verify the simulation results.
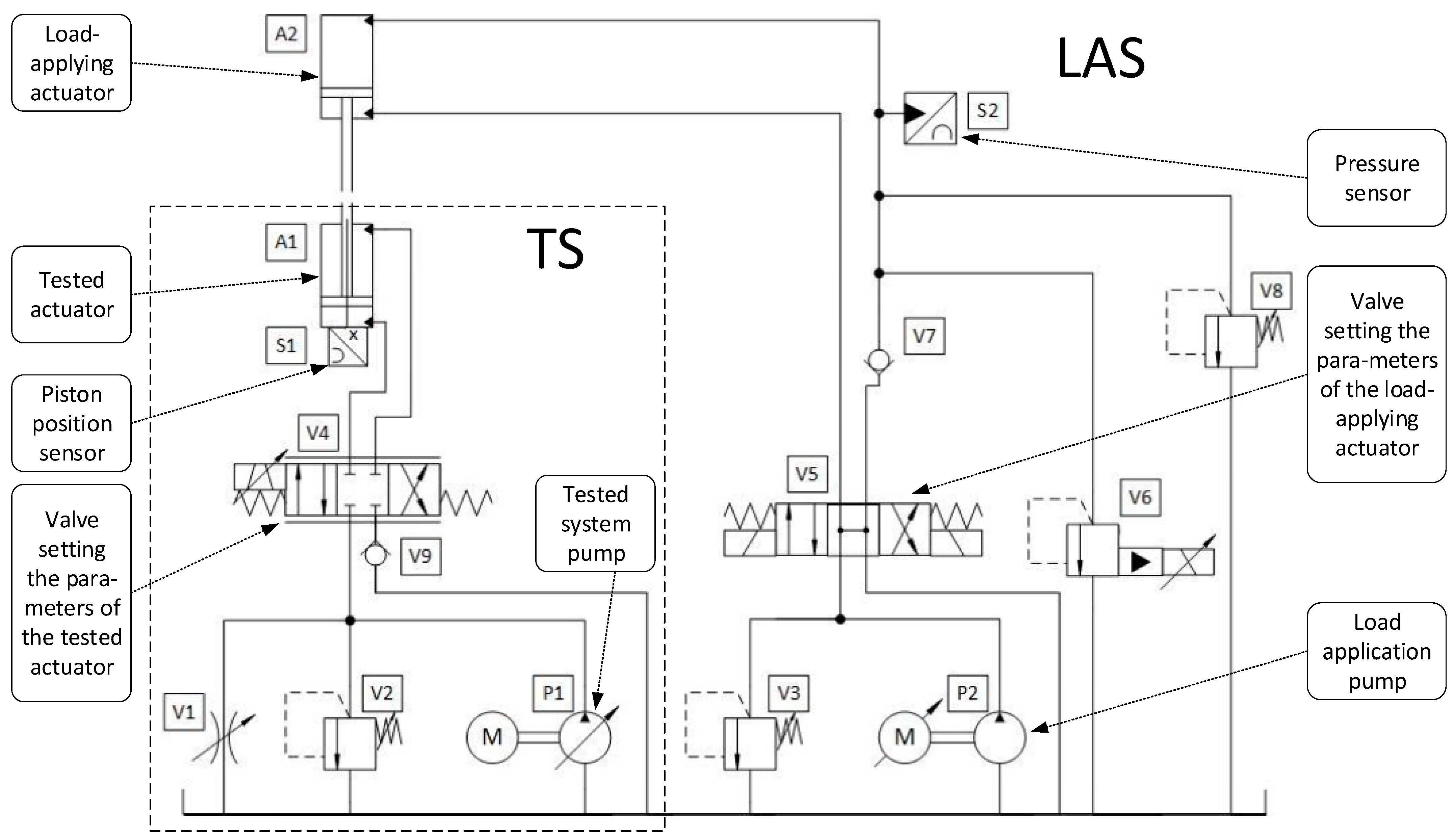
2. Concept of DT/DS Test and Tuning Station
- The variable load application subsystem, the subsystem that applies a load on the tested actuator;
- The position control system being tested—usually an actuator with a valve and controller programmed with a specific control strategy algorithm;
- Mechanical structure in which the actuators and other station elements are installed;
- Control and measurement processing systems, including sensors, controllers, and DT/DS software.
2.1. Power Hydraulics System
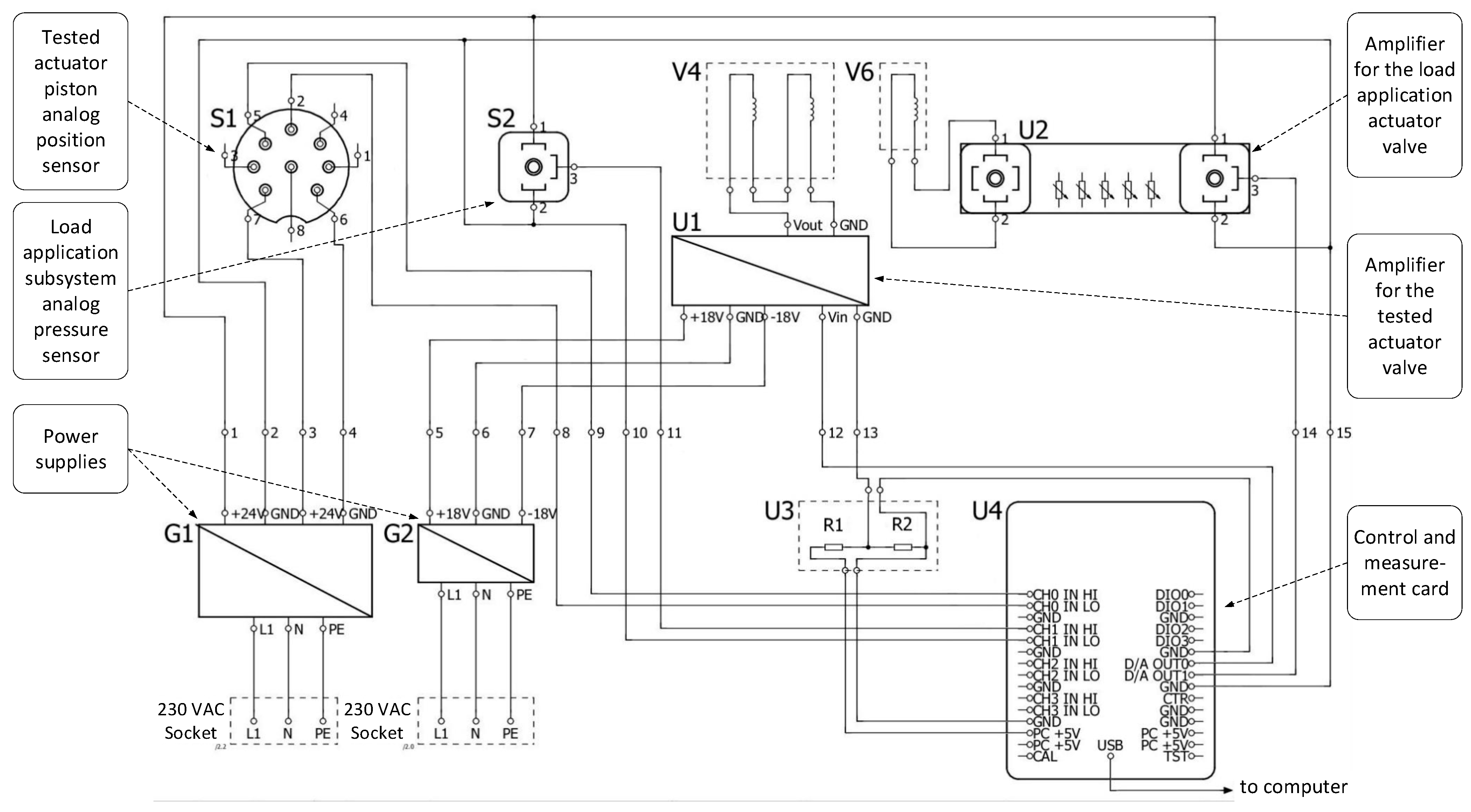
2.2. Control and Measurement System
3. Methodology of Design and Identification of the Load Application Subsystem (LAS)
3.1. Identification and Modeling
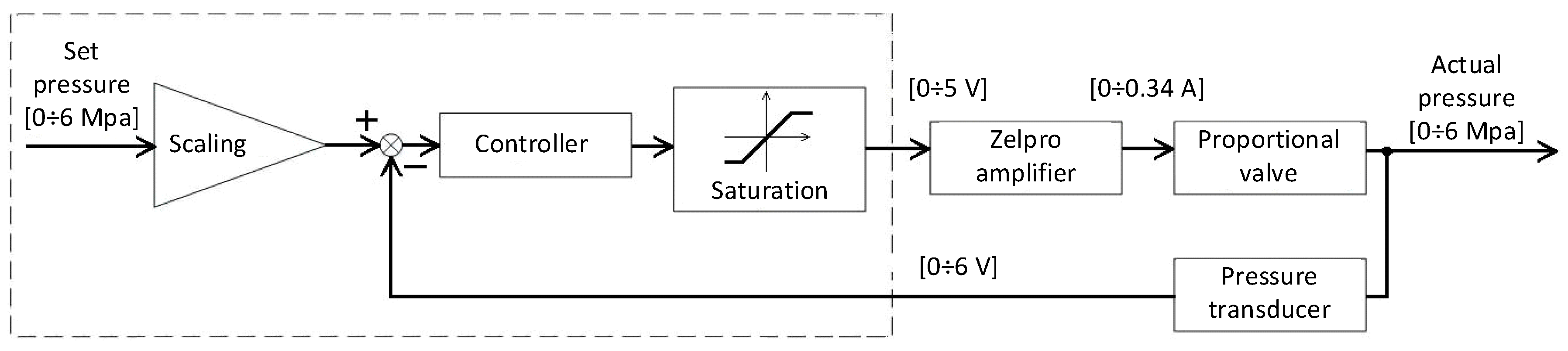
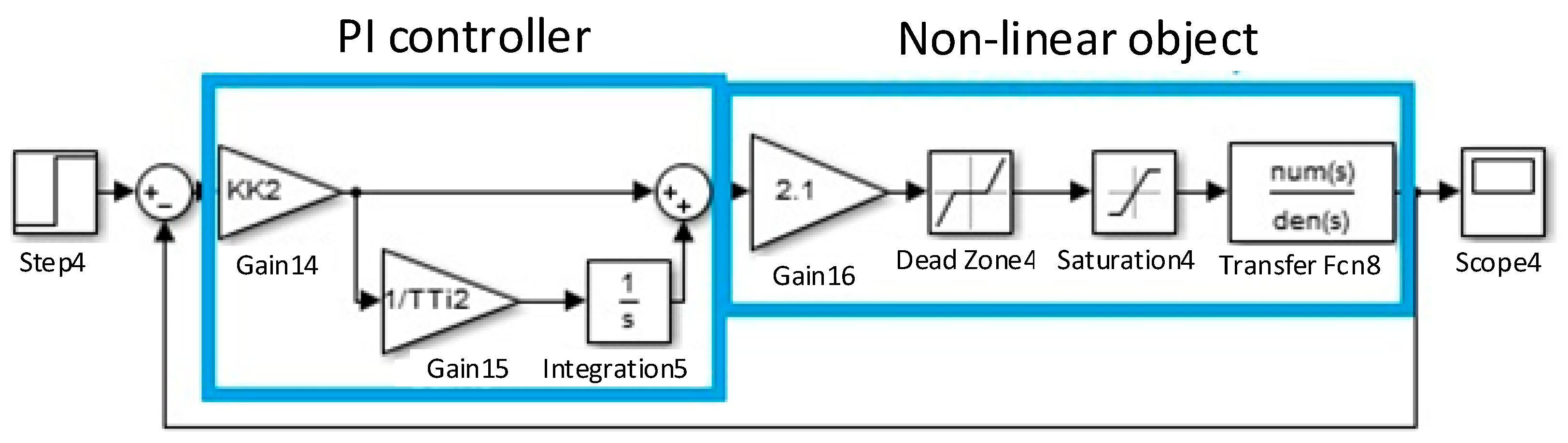
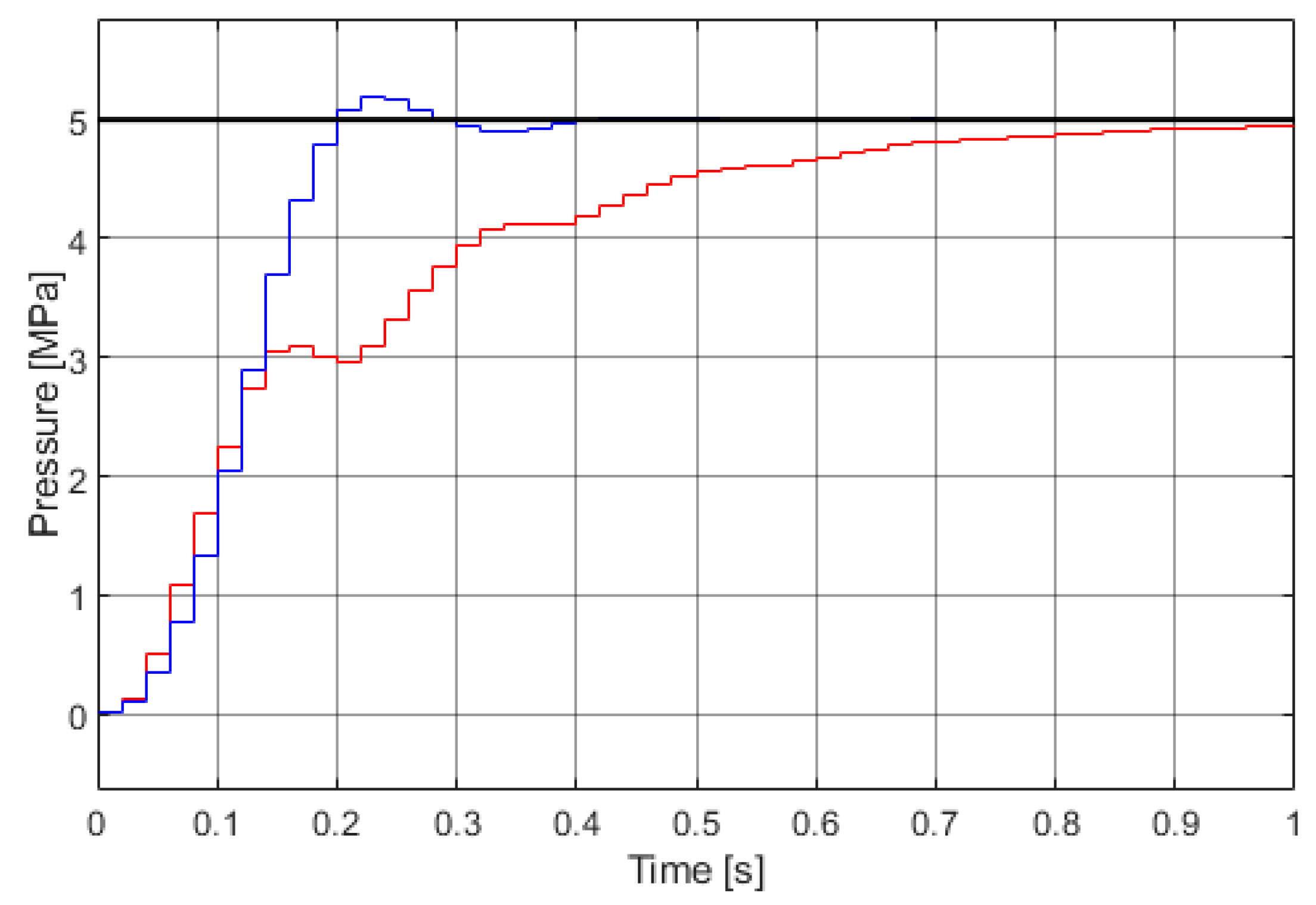
3.2. Controller Selection, Implementation, and Computer Simulation
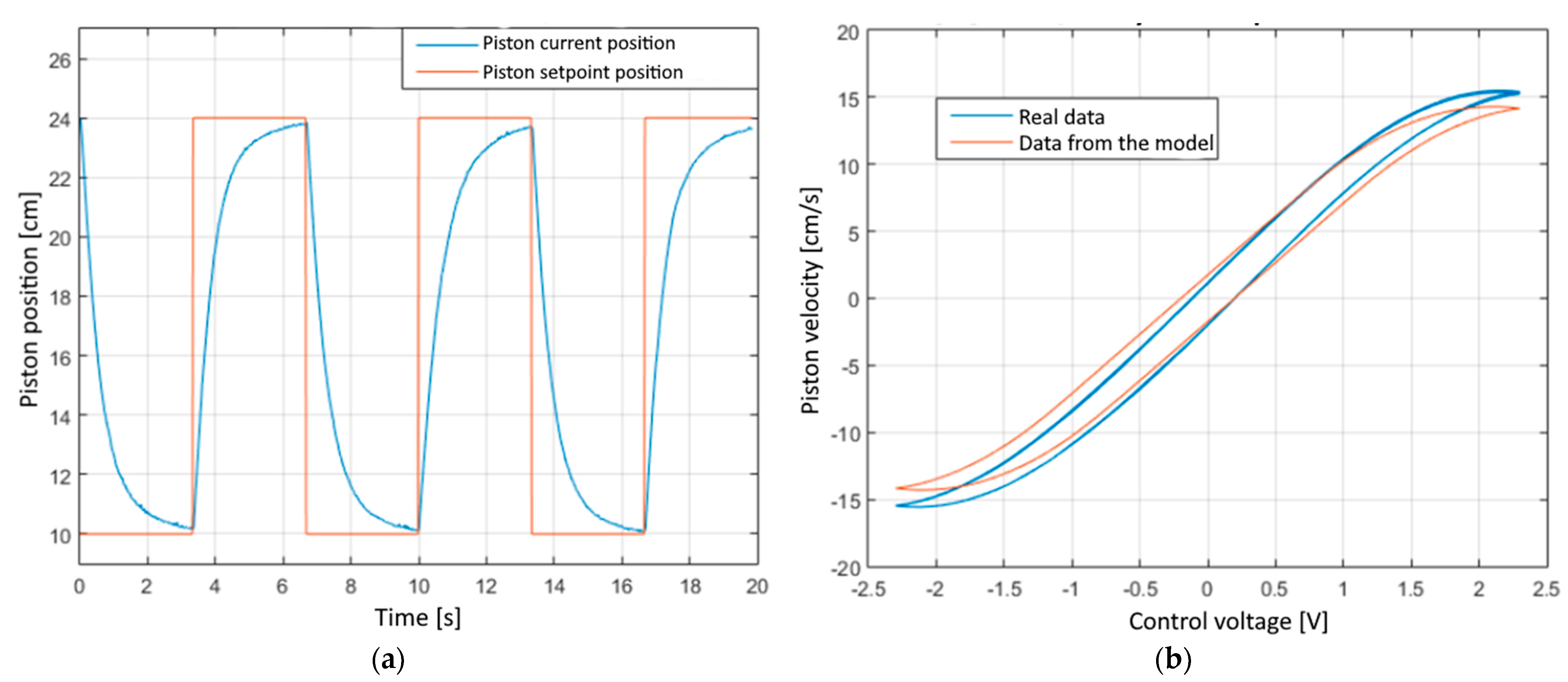
3.3. Laboratory Tests of the Load Application Subsystem
- n—sample number in the n-th step;
- yn, yn−1—output of the controller at time n, n − 1;
- xn, xn−1—input to the controller at moment n, n − 1;
- a, b—coefficients determining the controller settings.
4. Position Control System TS—Modeling, Identification, Simulation, and Tests
4.1. Identification and Modeling, Including Disruption Modeling
4.2. Tuning and Simulation of the Example Controllers: PID and Fuzzy
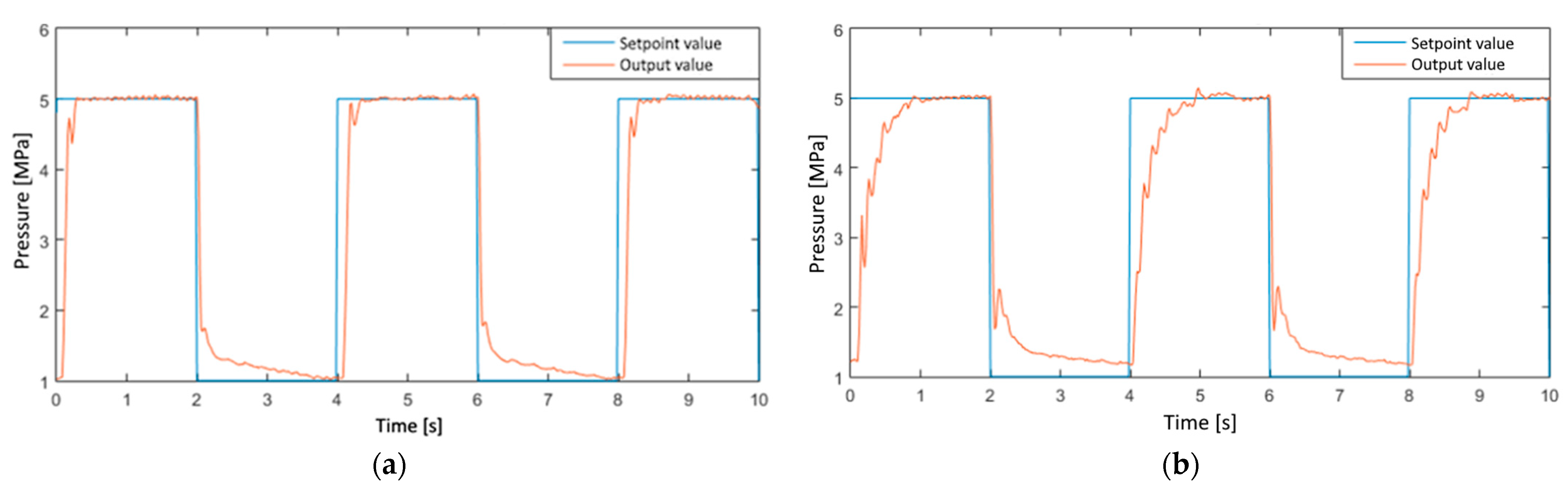
4.3. Tests of the Laboratory Station
- For the PID controller: 1.3031;
- For the fuzzy controller: 1.8612.
5. Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Barricelli, B.R.; Casiraghi, E.; Fogli, D. A Survey on Digital Twin: Definitions, Characteristics, Applications, and Design Implications. IEEE Access 2019, 7, 167653–167671. [Google Scholar] [CrossRef]
- Liu, M.; Fang, S.; Dong, H.; Xu, C. Review of Digital Twin about Concepts, Technologies, and Industrial Applications. J. Manuf. Syst. 2021, 58, 346–361. [Google Scholar] [CrossRef]
- Kritzinger, W.; Karner, M.; Traar, G.; Henjes, J.; Sihn, W. Digital Twin in Manufacturing: A Categorical Literature Review and Classification. IFAC-PapersOnLine 2018, 51, 1016–1022. [Google Scholar] [CrossRef]
- Negri, E.; Fumagalli, L.; Macchi, M. A Review of the Roles of Digital Twin in CPS-Based Production Systems. Procedia Manuf. 2017, 11, 939–948. [Google Scholar] [CrossRef]
- Pizoń, A. Hydrauliczne i Elektrohydrauliczne Układy Sterowania i Regulacji [in Polish] Hydraulic and Electrohydraulic Control and Regulation Systems; Wydawnictwa Naukowo-Techniczne: Warszawa, Poland, 1987; ISBN 83-204-0851-2. [Google Scholar]
- Zhu, T.; Xie, H.; Yang, H. Design and Tracking Control of an Electro-Hydrostatic Actuator for a Disc Cutter Replacement Manipulator. Autom. Constr. 2022, 142, 104480. [Google Scholar] [CrossRef]
- Andersen, T.; Pedersen, H.; Bech, M.; Schmidt, L. A Low Order Adaptive Control Scheme for Hydraulic Servo Systems. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics (FPM), Harbin, China, 5–7 August 2015; pp. 1148–1152. [Google Scholar]
- Kim, J.; Jin, M.; Choi, W.; Lee, J. Discrete Time Delay Control for Hydraulic Excavator Motion Control with Terminal Sliding Mode Control. Mechatronics 2019, 60, 15–25. [Google Scholar] [CrossRef]
- Chiang, M.-H.; Lee, L.-W.; Huang, K.-S. Development of a Hydraulic-Piezoelectric-Actuator for Hybrid Positioning Control with Large Stroke, High Loading and Sub-Micrometer Accuracy. In Proceedings of the IEEE International Conference on Mechatronics, ICM ’05, Taipei, Taiwan, 10–12 July 2005; pp. 45–49. [Google Scholar]
- Lukachev, E.; Scheidl, R. Hydraulic Switching Type Position Control Of A Large Cylinder Drive. In Proceedings of the 2018 Global Fluid Power Society PhD Symposium (GFPS), Samara, Russia, 18–20 July 2018; pp. 1–6. [Google Scholar]
- Jin, L.; Wang, Q. Positioning Control of Hydraulic Cylinder with Unknown Friction Using on/off Directional Control Valve. Proc. Inst. Mech. Eng. Part J. Syst. Control Eng. 2018, 232, 983–993. [Google Scholar] [CrossRef]
- Lei, J.; Wang, X.; Xu, Z.; Luo, Y.; Pi, Y. Position Control for Asymmetrical Hydraulic Cylinder System Using a Single on/off Valve. J. Shanghai Jiaotong Univ. Sci. 2010, 15, 651–656. [Google Scholar] [CrossRef]
- Ursu, I.; Toader, A.; Halanay, A.; Balea, S. New Stabilization and Tracking Control Laws for Electrohydraulic Servomechanisms. Eur. J. Control 2013, 19, 65–80. [Google Scholar] [CrossRef]
- Liu, Z.; Gao, Q.; Niu, H. The Research on the Position Control of the Hydraulic Cylinder Based on the Compound Algorithm of Fuzzy & Feedforward-Feedback. Sens. Transducers 2014, 162, 314. [Google Scholar]
- Dang, X.; Zhao, X.; Dang, C.; Jiang, H.; Wu, X.; Zha, L. Incomplete Differentiation-Based Improved Adaptive Backstepping Integral Sliding Mode Control for Position Control of Hydraulic System. ISA Trans. 2021, 109, 199–217. [Google Scholar] [CrossRef]
- Sekhavat, P.; Wu, Q.; Sepehri, N. Lyapunov-Based Friction Compensation for Accurate Positioning of a Hydraulic Actuator. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; Volume 1, pp. 418–423. [Google Scholar]
- Jiang, C.; Sui, S.; Tong, S. Finite-Time Fuzzy Adaptive Output Feedback Control of Electro-Hydraulic System with Actuator Faults. Inf. Sci. 2023, 623, 577–591. [Google Scholar] [CrossRef]
- Shi, J.; Quan, L.; Zhang, X.; Xiong, X. Electro-Hydraulic Velocity and Position Control Based on Independent Metering Valve Control in Mobile Construction Equipment. Autom. Constr. 2018, 94, 73–84. [Google Scholar] [CrossRef]
- Meena, K.; Dhavalikar, M.; Thorat, S. A Review on the Position Control of Hydraulic Cylinder for Accuracy and Response Time. Mater. Today Proc. 2023, 72, 995–999. [Google Scholar] [CrossRef]
- Meng, J.; Wang, X.; Liu, Z.; Wang, B. Design and Simulate Analysis on Fuzzy Sliding Mode Controller in High Precise Electro-Hydraulic System. In Proceedings of the 2009 First International Workshop on Education Technology and Computer Science, Wuhan, China, 7–8 March 2009; pp. 441–445. [Google Scholar]
- Jin, K.; Yan, H.-z.; Tan, W.-z.; Chen, X.-y. United Simulation of Hydraulic System and Control System of Dumping Casting Machine by Low Flow Hydraulic Driving. In Proceedings of the 2012 Power Engineering and Automation Conference, Wuhan, China, 18–20 September 2012; pp. 1–4. [Google Scholar]
- Sosnovsky, N.; Ganieva, D. Mathematical Modeling and Analysis of the Electrohydraulic Actuator with the Throttle Control. IOP Conf. Ser. Mater. Sci. Eng. 2019, 589, 012016. [Google Scholar] [CrossRef]
- Acuña-Bravo, W.; Canuto, E.; Agostani, M.; Bonadei, M. Proportional Electro-Hydraulic Valves: An Embedded Model Control Solution. Control Eng. Pract. 2017, 62, 22–35. [Google Scholar] [CrossRef]
- Tran, N.H.; Tao, Q.B.; Huynh, T.T.; Tran, X.T.; Vo, N.T. Modeling of Position Control for Hydraulic Cylinder Using Servo Valve. In Proceedings of the Intelligent Information and Database Systems: 10th Asian Conference, ACIIDS 2018, Dong Hoi City, Vietnam, 19–21 March 2018; Proceedings, Part II 10. Springer: Cham, Switzerland, 2018; pp. 696–706. [Google Scholar]
- Maghareh, A.; Silva, C.E.; Dyke, S.J. Servo-Hydraulic Actuator in Controllable Canonical Form: Identification and Experimental Validation. Mech. Syst. Signal Process. 2018, 100, 398–414. [Google Scholar] [CrossRef]
- Gao, B.; Shao, J.; Yang, X. A Compound Control Strategy Combining Velocity Compensation with ADRC of Electro-Hydraulic Position Servo Control System. ISA Trans. 2014, 53, 1910–1918. [Google Scholar] [CrossRef]
- Çetin, Ş.; Akkaya, A.V. Simulation and Hybrid Fuzzy-PID Control for Positioning of a Hydraulic System. Nonlinear Dyn. 2010, 61, 465–476. [Google Scholar] [CrossRef]
- Schwarz, J.; Lohmann, B. Robust Identification and Control of Mobile Hydraulic Systems Using a Decentralized Valve Structure. Control Eng. Pract. 2024, 151, 106030. [Google Scholar] [CrossRef]
- Wonohadidjojo, D.M.; Kothapalli, G.; Hassan, M.Y. Position Control of Electro-Hydraulic Actuator System Using Fuzzy Logic Controller Optimized by Particle Swarm Optimization. Int. J. Autom. Comput. 2013, 10, 181–193. [Google Scholar] [CrossRef]
- Ghani, M.F.; Ghazali, R.; Jaafar, H.I.; Soon, C.C. Real-Time Trajectory Tracking Control of an Electro-Hydraulic System Using a Fuzzy Logic Sliding Mode Controller. In Proceedings of the 2022 IEEE International Conference on Artificial Intelligence in Engineering and Technology (IICAIET), Kinabalu, Malaysia, 13–15 September 2022; pp. 1–6. [Google Scholar]
- Ren, X.; Zhao, Y. Electro-Hydraulic Position Synchronization Control System Based on Auto-Disturbances Rejection and Feedback. In Proceedings of the World Automation Congress 2012, Puerto Vallarta, Mexico, 24–28 June 2012; pp. 1–4. [Google Scholar]
- Chen, H.-M.; Renn, J.-C.; Su, J.-P. Sliding Mode Control with Varying Boundary Layers for an Electro-Hydraulic Position Servo System. Int. J. Adv. Manuf. Technol. 2005, 26, 117–123. [Google Scholar] [CrossRef]
- Zheng, J.; Zhao, S.; Wei, S. Adaptive Fuzzy PID Control for Switched Reluctance Motor Direct Drive Servo Hydraulic Press. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009; Volume 1, pp. 771–774. [Google Scholar]
- Noskievič, P. Smart Control of the Integrated Hydraulic Actuator. In Proceedings of the 2018 19th International Carpathian Control Conference (ICCC), Szilvasvarad, Hungary, 28–31 May 2018; pp. 307–311. [Google Scholar]
- Shi, H.; Yang, J.; Mei, X.; Gong, G. Coordination Control for Parallel Actuation of Hydraulic Power Assisted Ball Screw Drive System. In Proceedings of the 2015 IEEE Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 19–20 December 2015; pp. 1010–1014. [Google Scholar]
- Chen, Z.; Wang, S.; Xu, K.; Wang, J.; Zhao, J.; Niu, S. Research on High Precision Control of Joint Position Servo System for Hydraulic Quadruped Robot. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 755–760. [Google Scholar]
- Zhang, L.; Li, Y. Synchronous Control of Double Hydraulic Cylinders of Scissors Aerial Work Platform Based on Fuzzy PID. In Proceedings of the 2020 5th International Conference on Electromechanical Control Technology and Transportation (ICECTT), Nanchang, China, 15–17 May 2020; pp. 349–354. [Google Scholar]
- Bernzen, W.; Wey, T.; Riege, B. Nonlinear Control of Hydraulic Differential Cylinders Actuating a Flexible Robot. In Proceedings of the 36th IEEE Conference on Decision and Control, San Diego, CA, USA, 10–12 December 1997; Volume 2, pp. 1333–1334. [Google Scholar]
- Shen, W.; Pan, J. Angle Tracking Control of Integrated Hydraulic Transformer Inner Loop Servo System. ISA Trans. 2023, 134, 312–321. [Google Scholar] [CrossRef] [PubMed]
- Shen, W.; Zhao, H.; Zhang, G.; Lin, Y.-J. An Event-Triggered Based Robust Control for Electro-Hydraulic Servo Machines with Active Disturbances Rejection. J. Frankl. Inst. 2022, 359, 2857–2885. [Google Scholar] [CrossRef]
- Han, W.; Xiong, L.; Yu, Z. Braking Pressure Control in Electro-Hydraulic Brake System Based on Pressure Estimation with Nonlinearities and Uncertainties. Mech. Syst. Signal Process. 2019, 131, 703–727. [Google Scholar] [CrossRef]
- Razmjooei, H.; Palli, G.; Nazari, M. Disturbance Observer-Based Nonlinear Feedback Control for Position Tracking of Electro-Hydraulic Systems in a Finite Time. Eur. J. Control 2022, 67, 100659. [Google Scholar] [CrossRef]
- Hung, H.T.; Kwan, A.K. A Study on the Position Control of Hydraulic Cylinder Driven by Hydraulic Transformer Using Disturbance Observer. In Proceedings of the 2008 International Conference on Control, Automation and Systems, Seoul, Republic of Korea, 14 October 2008; pp. 2634–2639. [Google Scholar]
- Bai, Y.; Yao, J.; Hu, J.; Feng, G. Output Feedback Active Disturbance Rejection Control of an Electro-Hydraulic Servo System Based on Command Filter. Chin. J. Aeronaut. 2024, S1000936124003017. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, Q.; Fang, J.; Lai, Z.; Feng, R.; Wei, J. Active Fault-Tolerant Control for the Dual-Valve Hydraulic System with Unknown Dead-Zone. ISA Trans. 2024, 145, 399–411. [Google Scholar] [CrossRef]
- Jiang, S.; Huang, F.; Liu, W.; Huang, Y.; Chen, Y. A Double Closed-Loop Digital Hydraulic Cylinder Position System Based on Global Fast Terminal Sliding Mode Active Disturbance Rejection Control. IEEE Access 2024, 12, 80138–80152. [Google Scholar] [CrossRef]
- Diao, S.; Zhao, X.; Zhao, D.; Dong, Z.; Qin, Y. Active Suspension Hierarchical Control with Parameter Uncertainty and External Disturbance of Electro-Hydraulic Actuators. Appl. Math. Model. 2024, 134, 50–70. [Google Scholar] [CrossRef]
- Rituraj, R.; Scheidl, R. Towards Digital Twin Development of Counterbalance Valves: Modelling and Experimental Investigation. Mech. Syst. Signal Process. 2023, 188, 110049. [Google Scholar] [CrossRef]
- Jiao, X.; Xie, J.; Wang, X.; Yan, Z.; Hao, Z.; Wang, X. Intelligent Decision Method for the Position and Attitude Self-Adjustment of Hydraulic Support Groups Driven by a Digital Twin System. Measurement 2022, 202, 111722. [Google Scholar] [CrossRef]
- Cai, N.; Xie, J.; Wang, X.; Liu, S.; Du, W. Method for the Relative Pose Reconstruction of Hydraulic Supports Driven by Digital Twins. IEEE Sens. J. 2023, 23, 4707–4719. [Google Scholar] [CrossRef]
- Li, M.; Wei, J.; Fang, J.; Shi, W.; Guo, K. Fuzzy Impedance Control of an Electro-Hydraulic Actuator with an Extended Disturbance Observer. Front. Inf. Technol. Electron. Eng. 2019, 20, 1221–1233. [Google Scholar] [CrossRef]
- Sun, C.; Fang, J.; Wei, J.; Hu, B. Nonlinear Motion Control of a Hydraulic Press Based on an Extended Disturbance Observer. IEEE Access 2018, 6, 18502–18510. [Google Scholar] [CrossRef]
- Ye, Y.; Yin, C.-B.; Gong, Y.; Zhou, J. Position Control of Nonlinear Hydraulic System Using an Improved PSO Based PID Controller. Mech. Syst. Signal Process. 2017, 83, 241–259. [Google Scholar] [CrossRef]
- Minav, T.; Pietola, M.; Filatov, D.M.; Devyatkin, A.V.; Heikkinen, J. Fuzzy Control of Direct-Driven Hydraulic Drive without Conventional Oil Tank. In Proceedings of the 2017 XX IEEE International Conference on Soft Computing and Measurements (SCM), Saint Petersburg, Russia, 24–26 May 2017; pp. 444–447. [Google Scholar]
- Feng, Y.; Ide, T.; Nabae, H.; Endo, G.; Sakurai, R.; Ohno, S.; Suzumori, K. Experimental Comparison of Antagonistic Hydraulic Muscle Actuation under Single/Dual and Zero/Overlapped Servovalve Configurations. Mechatronics 2022, 83, 102737. [Google Scholar] [CrossRef]
- Bonchis, A.; Corke, P.I.; Rye, D.C. Experimental Evaluation of Position Control Methods for Hydraulic Systems. IEEE Trans. Control Syst. Technol. 2002, 10, 876–882. [Google Scholar] [CrossRef]
- Moog G771, G772, G773, 771, 772, and 773 Series Direct-Operated Servo Valves for Analog Signals. Available online: https://www.moog.com/literature/ICD/77seriesvalves.pdf (accessed on 23 October 2023).
- PONAR Wadowice Zawory Sterujące Ciśnieniem, Zawory Przelewowe Przelewowe Nabojowe, Proporcjonalne Typ WZPSE6 [in Polish]. Pressure Control Valves, Cartridge Pressure Relief Valves, Proportional Type WZPSE6. Available online: https://www.ponar-wadowice.pl/typ/667-zawory-sterujace-cisnieniem-zawory-przelewowe-przelewowe-nabojowe-proporcjonalne-wzpse6 (accessed on 22 October 2023).
- Meilhaus Electronic RedLab-1008, USB-1008, MiniLab-1008. Available online: https://www.meilhaus.de/en/redlab-1008.htm (accessed on 22 October 2023).
- Balluff BTL0324 (BTL5-E10-M0150-P-S32) Magnetostrictive Linear Position Sensors in Profile Design. Available online: https://www.balluff.com/en-lv/products/BTL5-E10-M0150-P-S32 (accessed on 12 November 2023).
- Danfoss Pressure Transmitter Sensor MBS 32-3015-1AB08. Available online: https://www.mandmcontrols.com/060g1259 (accessed on 12 November 2023).
- Zelpro Regulowany Wzmacniacz Prądu 20RE10E—Adjustable Current Amplifier. Available online: http://zelpro.com.pl/sterowanie-hydrauliki-proporcjonalnej/101-2/ (accessed on 12 November 2023).
- Zimmer, A.; Englot, A. Identyfikacja Obiektów i Sygnałów: Teoria i Praktyka Dla Użytkowników Matlaba [in Polish]. Object and Signal Identification: Theory and Practice for Matlab Users; Wydawnictwo PK: Kraków, Poland, 2005. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Continuous Transmittance | Discrete Transmittance | |
|---|---|---|
| Settings obtained using the Z–N method | ||
| Settings obtained using the SDO toolkit |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ćwikła, G.; Szewczyk, M. Station for Tuning and Testing Digital Twin in Hydraulic Actuator Control Systems under Programmable Load—Methodology, Design, and Tests. Electronics 2024, 13, 3528. https://doi.org/10.3390/electronics13173528
Ćwikła G, Szewczyk M. Station for Tuning and Testing Digital Twin in Hydraulic Actuator Control Systems under Programmable Load—Methodology, Design, and Tests. Electronics. 2024; 13(17):3528. https://doi.org/10.3390/electronics13173528
Chicago/Turabian StyleĆwikła, Grzegorz, and Mirosław Szewczyk. 2024. "Station for Tuning and Testing Digital Twin in Hydraulic Actuator Control Systems under Programmable Load—Methodology, Design, and Tests" Electronics 13, no. 17: 3528. https://doi.org/10.3390/electronics13173528