

A Review of State-of-the-Art Multiphase and Hybrid Electric Machines


Abstract
:1. Introduction
2. Review of Hybrid Machines
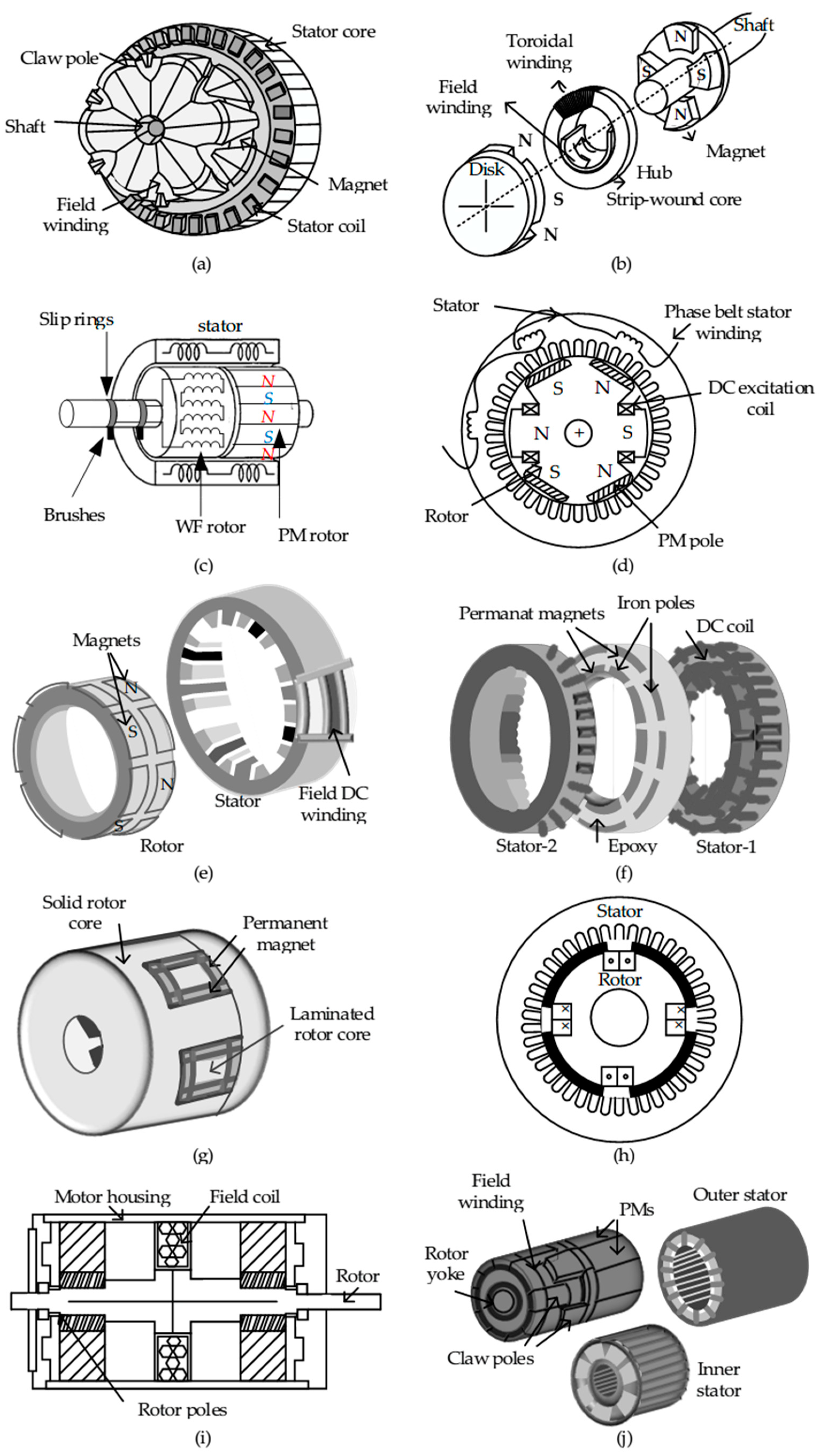
2.1. Topologies
2.2. Application
3. Multiphase Winding
3.1. Advantages of Multiphase Winding
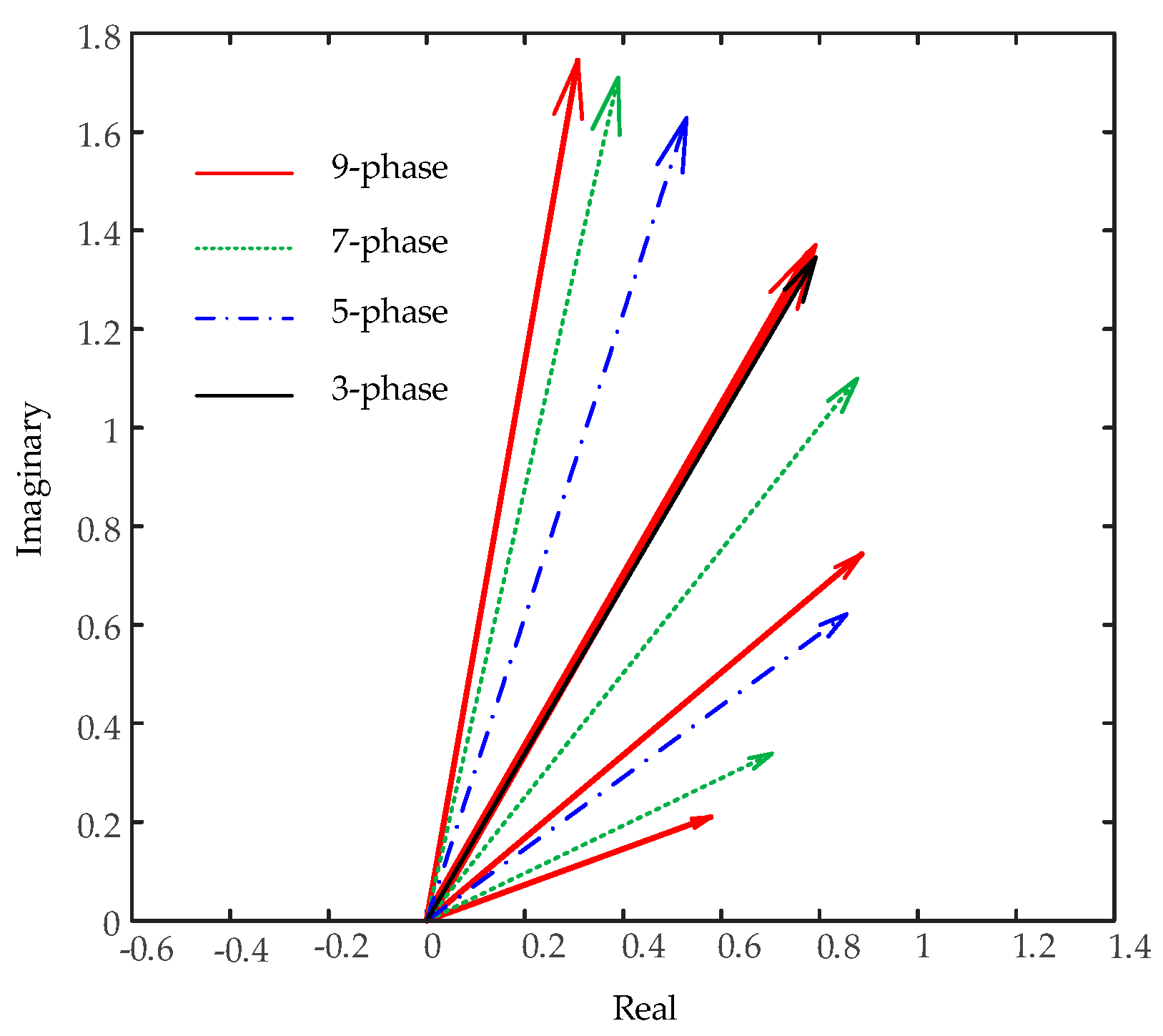
- Increased Back-EMF: This generally results in greater power density and efficiency [80]. The primary reason for the larger back-EMF in multiphase machines is the concept of the “winding factor”. The winding factor is a measure of how effectively the winding contributes to the generation of the back-EMF in the machine. In a single-phase machine, the winding factor is limited because the winding is concentrated in one phase, resulting in less effective use of the available magnetic circuit [94]. In contrast, in a multiphase machine, the windings are distributed among multiple phases, resulting in a smaller angle between the induced voltage of each phase. The total phase back-EMF is the sum of a number of back-EMF vectors from the coils associated with a phase, hence the smaller angle results in a larger back-EMF amplitude [95,96]. As a consequence, each winding contributes more effectively to the overall generation of the magnetic field and, consequently, the back-EMF. This balanced and spatially distributed magnetic field results in a more stable and consistent back-EMF waveform, reducing harmonic content and improving the machine’s performance [97].
- Improved Fault Tolerance: Multiphase systems exhibit better fault tolerance compared to three-phase and single-phase systems due to their inherent redundancy and distributed winding configurations [98]. In some cases, when a fault occurs in one phase, it may be possible to isolate and disconnect the faulty phase while allowing the machine to continue operating with the remaining healthy phases [99]. This selective isolation helps in preventing cascading failures and protects the overall system integrity. In contrast, the three-phase machines have a smaller number of phases and losing a phase will lead to a larger portion of the power being lost and/or overloading the remaining two phases. However, in multiphase winding, as there are a greater number of phases, the overload will be lighter and there is less chance of shutting down the machine.
- Improved Power Density and Efficiency: Multiphase machines increase power density through a combination of design features and operational advantages [100]. By allowing for higher slot fill factors and reduced current ripple, multiphase configurations enable more efficient use of available space and increased current-carrying capability, translating to greater power density [101]. In addition, the multiphase winding improves the back-EMF. Therefore, for the same output power, the current will be smaller; this results in lower losses and greater power density and/or efficiency.
- Improved Reliability: Multiphase machines offer enhanced thermal management capabilities, allowing for more effective heat dissipation and temperature regulation across the machine, which in turn reduces the risk of overheating and insulation degradation [102]. Moreover, the versatility of multiphase control strategies enables fault detection and isolation algorithms to be implemented more effectively, facilitating proactive maintenance and fault mitigation strategies [103], improving reliability.
- Reduced Torque Ripple: Multiphase machines, especially those with a higher number of phases, have reduced torque ripple compared to three-phase machines [104]. This reduced torque ripple translates to smoother operation and less mechanical stress on the system, making it more resilient to faults and failures [105]. Multiphase machines utilize multiple phases with distributed windings, resulting in a smoother and more continuous rotating magnetic field [106]. The balanced distribution of winding coils around the stator helps reduce torque pulsations and harmonics, leading to a more constant torque output [104,105,106]. This smoother torque production results in improved mechanical performance and reduced mechanical stress on the machine. On the other hand, the distributed winding and increased number of phases allow for better utilization of the available magnetic materials, leading to higher torque generation without increasing the machine’s physical size significantly [107]. Another element can be the cogging torque, also known as detent torque, which is an undesirable torque variation that occurs due to the interaction between the stator and rotor teeth in electric machines. Multiphase machines with distributed windings generally exhibit reduced cogging torque [107]. The smooth and evenly distributed magnetic field helps minimize the cogging effect, leading to improved torque stability.
- Lower Harmonic Distortion: In multiphase machines, the winding coils are distributed symmetrically around the stator, resulting in a more balanced and uniform magnetic field [108]. This balanced distribution helps to minimize the generation of harmonics during the operation of the machine [109]. The use of multiple phases allows for the cancellation of some harmonics that may be present in the individual phase currents [110]. As the phases are evenly spaced in the electrical cycle, the harmonic components of each phase tend to sum up in a way that some harmonics cancel each other out, reducing the overall harmonic content in the output [109,110].
3.2. Selection of Number of Phases
4. Motor and Generator Modes in Hybrid Machines
5. Discussion and Recommendations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Phase voltage | CPM | Claw-pole machine | |
| Phase current | TSTFM | Toroidal stator transverse flux machine | |
| Stator resistance | HESM | Hybrid excitation synchronous machine | |
| Stator reactance | SynPM | Synchronous permanent magnet machine | |
| Total back-EMF | CPPM | Consequent-pole permanent magnet hybrid excitation machine | |
| Back-EMF from the permanent magnet | FCTPM | Consequent-pole permanent magnet hybrid excitation machine | |
| Back-EMF from the wound field | HHESM | Homopolar hybrid excitation synchronous machine | |
| Power factor angle | SDESM | Series double-excited synchronous machine | |
| Angular frequency | SRM | Switch reluctance machine | |
| Phase apparent power | DSHESG | Dual-stator hybrid excited synchronous generator | |
| Torque angle | SW | Symmetrical winding | |
| Phase active power | ASW | Asymmetrical winding | |
| Phase reactive power | SHEV | Series hybrid electric vehicle |
References
- Mousavi, Y.; Bevan, G.; Kucukdemiral, I.B.; Fekih, A. Observer-Based High-Order Sliding Mode Control of DFIG-Based Wind Energy Conversion Systems Subjected to Sensor Faults. IEEE Trans. Ind. Appl. 2024, 60, 1750–1759. [Google Scholar] [CrossRef]
- Razi, S.; Mehreganian, N.; Soleiman Fallah, A. Chapter 3—Multiphysics of Wind Turbines in Extreme Loading Conditions. In Multiphysics: Advances and Applications; Academic Press: Cambridge, MA, USA, 2024; pp. 33–64. [Google Scholar]
- Notash, F.Y.; Rodriguez, J.; Tohidi, S. One Beat Delay Predictive Current Control of a Reduced-Switch 3-Level VSI-Fed IPMSM with Minimized Torque Ripple. In Proceedings of the 2021 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Jinan, China, 18–20 September 2021; pp. 519–523. [Google Scholar]
- Manzoor, M.O.; Beik, O.; Ateeq, W.; Gholamian, M. Dynamic Modeling of Hybrid Generator-Based Wind Energy Conversion System. In Proceedings of the 2024 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 19–22 February 2024; pp. 1–5. [Google Scholar]
- Ateeq, W.; Beik, O.; Manzoor, O.; Gholamian, M. Control of Borrego Solar Microgrid Integrated with a Hybrid Generator-Based Wind Generation System. In Proceedings of the 2024 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 19–22 February 2024; pp. 1–5. [Google Scholar]
- Mohammadabadi, S.M.S.; Liu, Y.; Canafe, A.; Yang, L. Towards Distributed Learning of PMU Data: A Federated Learning based Event Classification Approach. In Proceedings of the 2023 IEEE Power & Energy Society General Meeting (PESGM), Orlando, FL, USA, 16–20 July 2023; pp. 1–5. [Google Scholar]
- Torkaman, H.; Shadaei, M.; Deyhimi, N.; Torkaman, H. Multi-objective Method to Reconfigure Radial Power Distribution System with DGs Considering Transformer Tap-Changing. In Proceedings of the 2021 IEEE International Conference on Environment and Electrical Engineering and 2021 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Bari, Italy, 7–10 September 2021; pp. 1–4. [Google Scholar]
- Bahrami, A.; Soltanifar, F.; Fallahi, P.; Meschi, S.S.; Sohani, A. Energy and Economic Advantages of Using Solar Stills for Renewable Energy-Based Multi-Generation of Power and Hydrogen for Residential Buildings. Buildings 2024, 14, 1041. [Google Scholar] [CrossRef]
- Xu, W.; Ying, F.; Yu, Y.; Yang, G.; Lee, C.H.T. Design and Analysis of a Five Phase Dual Stator Hybrid Excitation Machine with Spoke-type Permanent Magnet Rotor. In Proceedings of the 2023 26th International Conference on Electrical Machines and Systems (ICEMS), Zhuhai, China, 5–8 November 2023; pp. 1987–1992. [Google Scholar]
- Hou, J.; Geng, W.; Zhu, T.; Zhang, Y.; Li, Q.; Zhang, Z. A New Hybrid Excitation Machine with Dual-Stator Single-Rotor Axial-Flux Topology for Electric Vehicle Traction Application. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October–3 November 2021; pp. 1342–1347. [Google Scholar]
- Xia, C.; Feng, Y.; Jia, M.; Gao, Y.; Huang, S. A Novel Counter-rotating Axial-flux Hybrid-excitation Permanent Magnet Machine with Dual-rotor. In Proceedings of the 2023 IEEE International Magnetic Conference—Short Papers (INTERMAG Short Papers), Sendai, Japan, 15–19 May 2023; pp. 1–2. [Google Scholar]
- Khan, M.P.; Muhammad, F.; Shah, F.; Abduulah; Ahmad, A.; Rehman, N.U. Rotor Pole Based Dual Stator Hybrid Excitation of Flux Switching Motor. In Proceedings of the 2021 International Conference on Emerging Power Technologies (ICEPT), Topi, Pakistan, 10–11 April 2021; pp. 1–5. [Google Scholar]
- Ashofteh, H.; Behzadi Forough, A. Renewable Energy’s Potential Scrutiny by PVSYST and RETSCREEN Software: Case Study—Khoy City, Iran. Renew. Energy Res. Appl. 2022, 3, 207–216. [Google Scholar]
- Bizhanpour, A.; Hasanzadeh, N.; Najafi, A.F.; Magagnato, F. Investigation of Different Deflector Geometry and Mechanism Effect on the Performance of an In-Pipe Hydro Savonius Turbine. Appl. Energy 2023, 350, 121697. [Google Scholar] [CrossRef]
- Samavat, T.; Nazari, M.; Ghalehnoie, M.; Nasab, M.A.; Zand, M.; Sanjeevikumar, P.; Khan, B. A Comparative Analysis of the Mamdani and Sugeno Fuzzy Inference Systems for MPPT of an Islanded PV System. Int. J. Energy Res. 2023, 2023, 7676113. [Google Scholar] [CrossRef]
- Besati, S.; Mosallanejad, A.; Manjrekar, M. Control Strategy for Virtual Synchronous Generator Based on Y-Z Source Inverter in Islanded Grids. In Proceedings of the 11th International Conference on Electrical and Electronics Engineering (ICEEE), Marmaris, Turkey, 11 December 2023. [Google Scholar]
- Wu, Y.; Mustafeez-ul-Hassan; Luo, F. Design and Optimization of a Modular Multiphase Drive for Multiphase Machines. In Proceedings of the 2023 IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 19–23 March 2023; pp. 1423–1428. [Google Scholar]
- Priyanka, C.P.; Nair, N.S.; Jagdanand, G. Thermal Analysis of Multiphase Induction Motor for Electric Vehicle Applications. In Proceedings of the 2022 IEEE Transportation Electrification Conference & Expo (ITEC), Anaheim, CA, USA, 15–17 June 2022; pp. 801–806. [Google Scholar]
- Shangguan, X.; Wu, X. Analysis of Rotor Slot Harmonics of Multiphase Induction Motor Based on Detection Coil. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October–3 November 2021; pp. 1386–1389. [Google Scholar]
- Liu, Y.; Xu, C.; Lin, Z.; Xiahou, K.; Wu, Q.H. Constructing an energy function for power systems with DFIGWT generation 872 based on a synchronous-generator-mimicking model. CSEE J. Power Energy Syst. 2022, 8, 64–75. [Google Scholar]
- Ludois, D.C.; Frankforter, K.J.; Ge, B.; Ghule, A.N.; Killeen, P.; Knippel, R.P. Macroscale Electrostatic Rotating Machines and Drives: A Review and Multiplicative Gain Performance Strategy. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 14–34. [Google Scholar] [CrossRef]
- Mayberry, M.; Ludois, D.C.; Severson, E.L. Toward Electrostatic Levitation of Macroscale Machines. IEEE Trans. Ind. Appl. 2022, 58, 4552–4561. [Google Scholar] [CrossRef]
- Levi, E. FOC: Field oriented control. In The Industrial Electronics Handbook: Power Electronics and Motor Drives; CRC Press: Boca Raton, FL, USA, 2011; pp. 24–32. [Google Scholar]
- Hlioui, S.; Gabsi, M.; Ahmed, H.B.; Barakat, G.; Amara, Y.; Chabour, F.; Paulides, J.J.H. Hybrid Excited Synchronous Machines. IEEE Trans. Magn. 2022, 58, 1–10. [Google Scholar] [CrossRef]
- Cao, Y.; Zhu, S.; Yu, J.; Liu, C. Optimization Design and Performance Evaluation of a Hybrid Excitation Claw Pole Machine. Processes 2022, 10, 541. [Google Scholar] [CrossRef]
- Boldea, I.; Tutelea, L.N.; Popa, A.A. Claw Pole Synchronous Motors/Generators (CP-SMs/Gs) Design and Control: Recent Progress. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 4556–4564. [Google Scholar] [CrossRef]
- Liu, C.; Wang, D.; Wang, S.; Niu, F.; Wang, Y.; Lei, G.; Zhu, J. Design and Analysis of a New Permanent Magnet Claw Pole Machine with S-Shape Winding. IEEE Trans. Magn. 2021, 57, 8103605. [Google Scholar] [CrossRef]
- Liu, C.; Yang, F.; Zhang, W.; Wang, Y. Design Optimization of a Novel Axial-Radial Flux Permanent Magnet Claw Pole Machine with SMC Cores and Ferrite Magnets. CES Trans. Electr. Mach. Syst. 2023, 7, 358–365. [Google Scholar] [CrossRef]
- Li, X.; Wang, X.; Dong, Y.; Lu, K.; Feng, X. Design and Analysis of Electric-Excitation Claw-Pole Field-Modulated Machine Considering Effective Harmonics. IEEE Trans. Ind. Appl. 2024, 60, 3893–3902. [Google Scholar] [CrossRef]
- Husain, T.; Hasan, I.; Sozer, Y.; Husain, I.; Muljadi, E. Design Considerations of a Transverse Flux Machine for Direct-Drive Wind Turbine Applications. IEEE Trans. Ind. Appl. 2018, 54, 3604–3615. [Google Scholar] [CrossRef]
- Ballestín-Bernad, V.; Artal-Sevil, J.S.; Domínguez-Navarro, J.A. Prototype of a Two-Phase Axial-Gap Transverse Flux Generator Based on Reused Components and 3D Printing. Energies 2023, 16, 1594. [Google Scholar] [CrossRef]
- Kaiser, B.; Parspour, N. Transverse Flux Machine—A Review. IEEE Access 2022, 10, 18395–18419. [Google Scholar] [CrossRef]
- Wu, S.; Wang, Y.; Tong, W. Design and Analysis of New Modular Stator Hybrid Excitation Synchronous Motor. CES Trans. Electr. Mach. Syst. 2022, 6, 188–194. [Google Scholar] [CrossRef]
- Amara, Y.; Ben Ahmed, H.; Gabsi, M. Hybrid Excited Synchronous Machines: Topologies, Design and Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2023; Available online: https://onlinelibrary.wiley.com/doi/10.1002/9781394185931.fmatter (accessed on 18 February 2024).
- Chu, J.; Cheng, H.; Sun, J.; Peng, C.; Hu, Y. Multi-Objective Optimization Design of Hybrid Excitation Double Stator Permanent Magnet Synchronous Machine. IEEE Trans. Energy Convers. 2023, 38, 2364–2375. [Google Scholar] [CrossRef]
- Ren, J.; Wang, X.; Zhao, W.; Liu, F. Torsional Vibration Analysis and Optimization Design of the Surface PM Synchronous Machine with Reduced Torque Ripple. IEEE Trans. Transp. Electrif. 2023. early access. [Google Scholar] [CrossRef]
- Notash, F.Y.; Luckett, B.; He, J. A Simplified Fixed Switching Frequency Model Predictive Control for an AFPM Motor Drive in a Distributed Electric Aircraft Propulsion System. In Proceedings of the 2023 IEEE Energy Conversion Congress and Exposition (ECCE), Nashville, TN, USA, 29 October–2 November 2023; pp. 4690–4697. [Google Scholar]
- Wang, X.; Fan, Y.; Chen, J.; Lei, Y.; Chen, Q.; Lee, C.H.T. The Current Region Control Strategy with Wide Speed Range of Radial-Axial Consequent Pole Hybrid Excitation Machine for Electric Vehicles. IEEE Trans. Transp. Electrif. 2023, 10, 1377–1387. [Google Scholar] [CrossRef]
- Fan, Y.; Wang, X.; Chen, Q.; Lei, Y.; Lee, C.H.T. Comparison and Analysis of the Consequent Pole Double Stator Hybrid Excitation Machine for Wide Speed Range Driving Applications. IEEE Trans. Veh. Technol. 2023, 73, 120–130. [Google Scholar] [CrossRef]
- Zhu, J.; Yuan, X.; Xie, S.; Zhao, C.; Shen, F.; Chen, J.; Lee, C.H.T. Design and Analysis of a New Hybrid Excitation Vernier Motor with Reduced Permanent Magnet. IEEE Trans. Transp. Electrif. 2024. early access. [Google Scholar] [CrossRef]
- Yoon, K.-y.; You, Y.-m. Optimal Design of a Novel Consequent-Pole Interior Permanent Magnet Motor with Flared-Structured Rotor. Appl. Sci. 2024, 14, 1496. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, M.; Yin, J.; Wu, J.; Yang, C. An Analytical Method for Calculating the Cogging Torque of a Consequent Pole Hybrid Excitation Synchronous Machine Based on Spatial 3D Field Simplification. Energies 2022, 15, 878. [Google Scholar] [CrossRef]
- Cao, G.; Ye, C.; Deng, C.; Wan, S.; Liu, K.; Yao, K.; Qi, X.; Lu, J.; Wang, Z. Theoretical Analysis for Rapid Design of Hybrid Excitation Synchronous Machine with Consequent Pole Rotor. IEEE Trans. Transp. Electrif. 2024. [Google Scholar] [CrossRef]
- Nishanth, F.; Van Verdeghem, J.; Severson, E.L. A Review of Axial Flux Permanent Magnet Machine Technology. IEEE Trans. Ind. Appl. 2023, 59, 3920–3933. [Google Scholar] [CrossRef]
- Marcolini, F.; De Donato, G.; Capponi, F.G.; Caricchi, F. Direct Oil Cooling of End-Windings in Torus-Type Axial-Flux Permanent-Magnet Machines. IEEE Trans. Ind. Appl. 2021, 57, 2378–2386. [Google Scholar] [CrossRef]
- Vidanalage, B.D.S.G.; Mukundan, S.; Li, W.; Kar, N.C. An Overview of PM Synchronous Machine Design Solutions for Enhanced Traction Performance. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; pp. 1697–1703. [Google Scholar]
- Zhang, W.; Yang, Z.; Zhai, L.; Wang, J. Speed Sensorless Control of Hybrid Excitation Axial Field Flux-Switching Permanent-Magnet Machine Based on Model Reference Adaptive System. IEEE Access 2020, 8, 22013–22024. [Google Scholar] [CrossRef]
- Agarala, A.; Bhat, S.S.; Zychma, D.; Sowa, P. A Novel Approach to Using Dual-Field Excited Synchronous Generators as Wind Power Generators. Energies 2024, 17, 456. [Google Scholar] [CrossRef]
- Asfirane, S.; Hliou, S.; Amara, Y.; Gabsi, M. Study of a Hybrid Excitation Synchronous Machine: Modeling and Experimental Validation. Math. Comput. Appl. 2019, 24, 34. [Google Scholar] [CrossRef]
- Wardach, M.; Palka, R.; Paplicki, P.; Prajzendanc, P.; Zarebski, T. Modern Hybrid Excited Electric Machines. Energies 2020, 13, 5910. [Google Scholar] [CrossRef]
- Xu, Z.; Li, T.; Zhang, F.; Zhang, Y.; Lee, D.-H.; Ahn, J.-W. A Review on Segmented Switched Reluctance Motors. Energies 2022, 15, 9212. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, Y.; Li, J.; Hu, H. Comparative Study on Torque Performance of Five-phase Single-Stator and Double-Stator Permanent Magnet Synchronous Motors. CES Trans. Electr. Mach. Syst. 2022, 6, 46–52. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, Y.; Zhang, F.; Jin, S.; Zhang, H.; Nian, H. Design and Performance Analysis of Dual-Stator Brushless Doubly-Fed Machine with Cage-Barrier Rotor. IEEE Trans. Energy Convers. 2019, 34, 1347–1357. [Google Scholar] [CrossRef]
- Chen, Y.; Zhuang, J.; Ding, Y.; Li, X. Optimal Design and Performance Analysis of Double Stator Multi-Excitation Flux-Switching Machine. IEEE Trans. Appl. Supercond. 2019, 29, 0601205. [Google Scholar] [CrossRef]
- Sun, C.; Li, J.; Ding, H.; Yang, H.; Han, S.; Han, N. Characteristic Analysis of a New Double Stator Bearingless Switched Reluctance Motor. IEEE Access 2021, 9, 38626–38635. [Google Scholar] [CrossRef]
- Liu, D.; Jin, J.; Sun, Y.; Tan, X.; Wang, B.; Feng, G.; Wei, L. Investigation of a Double-Stator Dual-PM Hybrid Excitation Machine with DC Bias Current. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 970–984. [Google Scholar] [CrossRef]
- Al-Adsani, A.S. Hybrid Permanent Magnet Machines For Electric Vehicles. Ph.D. Dissertation, University of Manchester, Manchester, UK, 2011. [Google Scholar]
- Al-Adsani, A.S.; Beik, O. Hybrid Electric Machine Concept. In Multiphase Hybrid Electric Machines; Springer: Cham, Switzerland, 2022; pp. 17–44. [Google Scholar]
- Yang, Q.; Zhao, C.; Zhang, W. Theoretical and Experimental Analysis of Electromagnetic Force Waves for Rotor Magnetic Shunt Hybrid Excitation Synchronous Motor. IEEE Sens. J. 2024, 24, 22511–22522. [Google Scholar] [CrossRef]
- Yang, Q.; Zhang, W.; Zhao, C. Research on Torque Performance of Marine Hybrid Excitation Synchronous Motors Based on PSO Optimization of Magnetic Permeability Structure. J. Mar. Sci. Eng. 2024, 12, 1064. [Google Scholar] [CrossRef]
- Guo, J.; Chen, Y.; Wu, W.; Wang, X.; Xie, Z.; Xie, L.; Shuai, Z. Wideband dq-Frame Impedance Modeling of Load-Side Virtual Synchronous Machine and Its Stability Analysis in Comparison with Conventional PWM Rectifier in Weak Grid. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 2440–2451. [Google Scholar] [CrossRef]
- Mseddi, A.; Dhouib, B.; Zdiri, M.A.; Alaas, Z.; Naifar, O.; Guesmi, T.; Alshammari, B.M.; Alqunun, K. Exploring the Potential of Hybrid Excitation Synchronous Generators in Wind Energy: A Comprehensive Analysis and Overview. Processes 2024, 12, 1186. [Google Scholar] [CrossRef]
- Al-Adsani, A.S.; Jarushi, A.M.; Beik, O. ICE/HPM generator range extender for a series hybrid EV powertrain. IET Electr. Syst. Transp. 2020, 10, 96–104. [Google Scholar] [CrossRef]
- Saude, B.; LaSart, N.; Blair, J.; Beik, O. Microgrid-Based Wind and Solar Power Generation on Moon and Mars. IEEE Trans. Smart Grid 2023, 14, 1329–1332. [Google Scholar] [CrossRef]
- Frikha, M.A.; Croonen, J.; Deepak, K.; Benômar, Y.; El Baghdadi, M.; Hegazy, O. Multiphase Motors and Drive Systems for Electric Vehicle Powertrains: State of the Art Analysis and Future Trends. Energies 2023, 16, 768. [Google Scholar] [CrossRef]
- Kindl, V.; Cermak, R.; Ferkova, Z.; Skala, B. Review of Time and Space Harmonics in Multi-Phase Induction Machine. Energies 2020, 13, 496. [Google Scholar] [CrossRef]
- Liu, Z.; Li, Y.; Zheng, Z. A review of drive techniques for multiphase machines. CES Trans. Electr. Mach. Syst. 2018, 2, 243–251. [Google Scholar] [CrossRef]
- Levi, E. Multiphase AC machines. In The Industrial Electronics Handbook: Power Electronics and Motor Drives; CRC Press: Boca Raton, FL, USA, 2011; pp. 3–31. [Google Scholar]
- Adil, W.A.; Mayer, J.S.; Greifelt, A.; Gerling, D. Novel Inherently Fault Tolerant Permanent Magnet Synchronous Machine (PMSM) with Multiphase Windings. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October–3 November 2021. [Google Scholar]
- Adil, W.A.; Mayer, J.S.; Greifelt, A.; Gerling, D. A new intelligent stator reconfigurable ampere response (ISRAR) method for open phase fault tolerant operation of multiphase machines. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October–3 November 2021. [Google Scholar]
- Yepes, A.G.; Lopez, O.; Gonzalez-Prieto, I.; Duran, M.J.; Doval-Gandoy, J. A Comprehensive Survey on Fault Tolerance in Multiphase AC Drives, Part 1: General Overview Considering Multiple Fault Types. Machines 2022, 10, 208. [Google Scholar] [CrossRef]
- Sizonenko, V.; Vitek, O. Preliminary Design and Comparison of 5 Phase and 6 Phase Fault Tolerant Outer Rotor Permanent Magnet Synchronous Machines with Different Electrical Steel. In Proceedings of the 2022 IEEE 20th International Power Electronics and Motion Control Conference (PEMC), Brasov, Romania, 25–29 September 2022. [Google Scholar]
- Tawfiq, K.B.; Ibrahim, M.N.; Sergeant, P. Analysis of Different Rewinding Configurations of Five-phase Synchronous Reluctance Machines. In Proceedings of the 2022 International Conference on Electrical Machines (ICEM), Valencia, Spain, 5–8 September 2022. [Google Scholar]
- Becker, F.; Scuiller, F. Sensorless controls of a 7-phase bi-harmonic Surface-mounted PM Machine. In Proceedings of the 2022 International Conference on Electrical Machines (ICEM), Valencia, Spain, 5–8 September 2022. [Google Scholar]
- Khelafi, A.; Djebli, A.; Ouadah, M.; Touhami, O.; Ibtiouen, R. Control of Five-Phase Induction Machine with Three-Phase Inverter via Three-to-Five Phase Transformer. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020. [Google Scholar]
- Khelafi, A.; Djebli, A.; Ouadah, M.; Touhami, O.; Ibtiouen, R. Behavior Investigation of Five-Phase Induction Machine Fed by Sine Voltage Using Three-to-Five Phase Transformer. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020. [Google Scholar]
- Ciriani, C.; Khan, H.A.; Mansour, K.; Olivo, M.; Tessarolo, A. A General Approach to the Design of Multi-Layer Fractional-Slot Concentrated Windings with Arbitrary Number of Slots, Poles and Phases. IEEE Access 2024. [Google Scholar] [CrossRef]
- Campagna, N.; Caruso, M.; Tommaso, A.O.D.; Miceli, R. A Comprehensive Generalized Theory and Classification of Multiphase Systems for Rotating and Linear Electric Machines. IEEE Trans. Energy Convers. 2024. early access. [Google Scholar] [CrossRef]
- Wang, W.; Wu, L. MMF Harmonic Analysis of Multi-M-Phase Fractional-Slot PM Machines with Partial Operating Winding Sets. IEEE Trans. Magn. 2024. [Google Scholar] [CrossRef]
- Cui, S.; Zhao, T.; Du, B.; Cheng, Y. Multiphase PMSM with Asymmetric Windings for Electric Drive. Energies 2020, 13, 3765. [Google Scholar] [CrossRef]
- Salem, A.; Narimani, M. A Review on Multiphase Drives for Automotive Traction Applications. IEEE Trans. Transp. Electrif. 2019, 5, 1329–1348. [Google Scholar] [CrossRef]
- Khamitov, A.; Severson, E.L. Design of Multi-Phase Combined Windings for Bearingless Machines. IEEE Trans. Ind. Appl. 2023, 59, 3243–3255. [Google Scholar] [CrossRef]
- Metwly, M.Y.; Abdel-Khalik, A.S.; Hamad, M.S.; Ahmed, S.; Elmalhy, N.A. Multiphase Stator Winding: New Perspectives, Advanced Topologies, and Futuristic Applications. IEEE Access 2022, 10, 103241–103263. [Google Scholar] [CrossRef]
- Martins, F.S.; Alvarenga, B.P.; Paula, G.T. Electrical Machine Winding Performance Optimization by Multi-Objective Particle Swarm Algorithm. Energies 2024, 17, 2286. [Google Scholar] [CrossRef]
- Chahba, S.; Krebs, G.; Morel, C.; Sehab, R.; Akrad, A. Design Optimisation Approach of an Outer Rotor Multiphase PM Actuator for Multirotor Aerial Vehicle Applications. Aerospace 2024, 11, 150. [Google Scholar] [CrossRef]
- Nishanth, F.; Khamitov, A.; Severson, E.L. Design of Multiphase Motor Windings for Control of Multiple Airgap Fields. In Proceedings of the 2022 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 9–13 October 2022; pp. 1–8. [Google Scholar]
- Laksar, J.; Cermak, R.; Hruska, K. Challenges in the Electromagnetic Design of Multiphase Machines: Winding and Equivalent Circuit Parameters. Energies 2021, 14, 7335. [Google Scholar] [CrossRef]
- Fleitas, A.; Ayala, M.; González, O.; Delorme, L.; Romero, C.; Rodas, J.; Gregor, R. Winding Design and Efficiency Analysis of a Nine-Phase Induction Machine from a Three-Phase Induction Machine. Machines 2022, 10, 1124. [Google Scholar] [CrossRef]
- Al-Adsani, A.S.; Beik, O. Characterization of a Hybrid PM Generator Using a 32-Phase Brushless Excitation Scheme. IEEE Trans. Energy Convers. 2019, 34, 1391–1400. [Google Scholar] [CrossRef]
- Al-Adsani, S.; Beik, O. Design of a Multiphase Hybrid Permanent Magnet Generator for Series Hybrid EV. IEEE Trans. Energy Convers. 2018, 33, 1499–1507. [Google Scholar] [CrossRef]
- Khamitov, A.; Severson, E.L. Analysis and Design of Multi-Phase Combined Windings for Bearingless Machines. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 3949–3956. [Google Scholar]
- Chen, Q.; Li, G.; Cao, W.; Qian, Z.; Wang, Q. Winding MMF and PM MMF Analysis of Axial-Flux Machine with Multi-Phase and Multi-Layer Winding. Energies 2021, 14, 5147. [Google Scholar] [CrossRef]
- Slunjski, M.; Dordevic, O.; Jones, M.; Levi, E. Symmetrical/Asymmetrical Winding Reconfiguration in Multiphase Machines. IEEE Access 2020, 8, 12835–12844. [Google Scholar] [CrossRef]
- Arshad, M.; Beik, O.; Manzoor, M.O.; Gholamian, M. Stability Analysis via Impedance Modelling of a Real-World Wind Generation System with AC Collector and LCC-Based HVDC Transmission Grid. Electronics 2024, 13, 1917. [Google Scholar] [CrossRef]
- Karni, A.; Beik, O.; Homaeinezhad, M. A Modified Middle Point Clamped (MMPC) DC-DC Converter for All-DC Wind Generation Systems. In Proceedings of the 2024 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 25–29 February 2024; pp. 325–332. [Google Scholar]
- Zhao, T.; Wu, S.; Cui, S. Multiphase PMSM with Asymmetric Windings for More Electric Aircraft. IEEE Trans. Transp. Electrif. 2020, 6, 1592–1602. [Google Scholar] [CrossRef]
- Huang, H.; Ma, F.; Fu, L.; Zhu, W.; Li, C. An Overview of Grounding Design and Grounding Fault Detection and Location Methods for a Multiphase Rectifier Generator Power Supply System. Machines 2023, 11, 985. [Google Scholar] [CrossRef]
- Akay, A.; Lefley, P. Research on torque ripple under healthy and open-circuit fault-tolerant conditions in a PM multiphase machine. CES Trans. Electr. Mach. Syst. 2020, 4, 349–359. [Google Scholar] [CrossRef]
- Gaetano, D.D.; Harikumaran, J.; Sala, G.; Degano, M.; Buticchi, G.; Gerada, C. On Torque Improvement by Current Harmonic Injection in Isotropic and Anisotropic Multiphase Machines. IEEE J. Emerg. Sel. Top. Ind. Electron. 2022, 3, 845–853. [Google Scholar] [CrossRef]
- Wang, P.; Gong, S.; Sun, X.; Liu, Z.; Jiang, D.; Qu, R. Fault-Tolerant Reconfiguration Topology and Control Strategy for Symmetric Open-Winding Multiphase Machines. IEEE Trans. Ind. Electron. 2022, 69, 8656–8666. [Google Scholar] [CrossRef]
- Homaeinezhad, M.; Beik, O. Development of a Generalized Multilevel SVM and Capacitor Voltage Balancing Strategy for Multiphase Three-Level NPC Converters. IEEE Open J. Power Electron. 2024, 5, 1059–1070. [Google Scholar] [CrossRef]
- Sala, G.; Mengoni, M.; Rizzoli, G.; Degano, M.; Zarri, L.; Tani, A. Impact of Star Connection Layouts on the Control of Multiphase Induction Motor Drives Under Open-Phase Fault. IEEE Trans. Power Electron. 2021, 36, 3717–3726. [Google Scholar] [CrossRef]
- Karni, A.; Beik, O.; Gholamian, M.; Homaeinezhad, M.; Manzoor, M.O. Multilevel Middle Point Clamped (MMPC) Converter for DC Wind Power Applications. Sustainability 2024, 16, 7563. [Google Scholar] [CrossRef]
- Olson, G.F.; Wu, Y.; Peretti, L. Parameter Estimation of Multiphase Machines Applicable to Variable Phase-Pole Machines. IEEE Trans. Energy Convers. 2023, 38, 2822–2831. [Google Scholar] [CrossRef]
- Sykes, R.L.; Summers, T.J.; Betz, R.E.; Torresan, H. Fault-Mitigation in Multi-Phase BLDC Machines—Literature Review. In Proceedings of the 2020 Australasian Universities Power Engineering Conference (AUPEC), Hobart, Australia, 29 November–2 December 2020; pp. 1–6. [Google Scholar]
- Tawfiq, K.B.; Abdel-Khalik, A.S.; Ibrahim, M.N.; EL-Refaie, A.M.; Sergeant, P. A Rewound Five-Phase Synchronous Reluctance Machine: Operating Voltage, Inductance Analysis and Comparison with Conventional Multiphase Machines. IEEE Trans. Ind. Appl. 2024, 60, 12–27. [Google Scholar] [CrossRef]
- Abu-Seif, M.A.; Ahmed, M.; Metwly, M.Y.; Abdel-Khalik, A.S.; Hamad, M.S.; Shehab. Data-Driven-Based Vector Space Decomposition Modeling of Multiphase Induction Machines. IEEE Trans. Energy Convers. 2023, 38, 2061–2074. [Google Scholar] [CrossRef]
- Beik, O.; Al-Adsani, A.S. A Wind Turbine Generator Design and Optimization for DC Collector Grids. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 484–493. [Google Scholar] [CrossRef]
- Sarfi, G.; Beik, O. MW-Scale High-Voltage Direct-Current Power Conversion for Large-Spacecraft Electric Propulsion. Electronics 2024, 13, 1455. [Google Scholar] [CrossRef]
- Talebzadeh, S.; Beik, O. Spacecraft Medium Voltage Direct-Current (MVDC) Power and Propulsion System. Electronics 2024, 13, 1810. [Google Scholar] [CrossRef]
- Homaeinezhad, M.; Beik, O. Modified Space Vector Modulation and Voltage Balancing of Multiphase Neutral Point Clamped Rectifier. In Proceedings of the 2023 IEEE Energy Conversion Congress and Exposition (ECCE), Nashville, TN, USA, 29 October–2 November 2023; pp. 3422–3428. [Google Scholar]
- Chapman, S. Electric Machinery Fundamentals, 5th ed.; McGraw-Hill Education: New York, NY, USA, 2011. [Google Scholar]
- Gholamian, M.; Beik, O. Reactive Power Control in All-DC Wind Generation System. In Proceedings of the 2023 IEEE Energy Conversion Congress and Exposition (ECCE), Nashville, TN, USA, 29 October–2 November 2023; pp. 579–583. [Google Scholar]
- Touhami, S. Analytical Sizing Models to Assess the Performances of High Specific Power Electric Motors for Hybrid Aircraft. Ph.D. Thesis, Institut National Polytechnique de Toulouse—INPT, Toulouse, France, 2020. Available online: https://theses.hal.science/tel-04170761/ (accessed on 1 July 2024).
- Mezani, S.; Belguerras, W.; Takorabet, N.; Lubin, T. Sizing Electrical Machines Using OpenOffice Calc. In Proceedings of the 9th European Conference for Aeronautics and Space Sciences (EUCASS), Lille, France, 3–8 July 2022. [Google Scholar]
- Rivera, C.A.; Poza, J.; Ugalde, G.; Almandoz, G. Industrial Design of Electric Machines Supported with Knowledge-Based Engineering Systems. Appl. Sci. 2021, 11, 294. [Google Scholar] [CrossRef]
- Fatemi, A.; Damodaran, S.; Ravi, G.; Shearer, C.; Pan, Y. Design Optimization of an Electric Machine for a 48-V Hybrid Vehicle with Comparison of Rotor Technologies and Pole-Slot Combinations. IEEE Trans. Ind. Appl. 2020, 56, 4609–4622. [Google Scholar] [CrossRef]
- Dong, C.; Qian, Y.; Zhang, Y.; Zhuge, W. A Review of Thermal Designs for Improving Power Density in Electrical Machines. IEEE Trans. Transp. Electrif. 2020, 6, 1386–1400. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hybrid Machine Type | Summary of Topology |
|---|---|
| CPM | Claw-Pole Machine (CM): The claw-pole machine utilizes a combination of permanent magnets (PMs) and a DC field winding for excitation, providing flexibility in field control and torque production. |
| TSTFM | Toroidal Stator Transverse Flux Machine (TSTFM): This machine features a toroidal stator design with windings wrapped around laminated iron cores, providing a transverse flux path for reduced core losses and improved power density. |
| HESM | Hybrid Excitation Synchronous Machine (HESM): HESM employs both PM excitation and wound field (WF) excitation, allowing for precise control of magnetic field strength and direction. |
| SynPM | Synchronous PM Hybrid AC Machine (SynPM): SynPM combines PM poles with WF excitation poles, providing a modifiable circuit back-EMF for enhanced control and performance. |
| CPPM | Consequent-Pole PM Hybrid Excitation Machine (CPPM): CPPM features alternating magnetic polarities in its rotor design, providing flexible control of magnetic flux distribution through the interaction of PMs and the DC field winding. |
| FCTPM | Field-Controlled Torus Machine (FCTPM): FCTPM is an axial field version of CPPM, featuring outer slotted stator discs and axially magnetized PMs for improved torque and compactness. |
| HHESM | Imbricated Hybrid Excitation Machine (IHEM): IHEM combines PM and field excitation for precise control of magnetic fields, offering versatility in different operating conditions. Homopolar Hybrid Excitation Synchronous Machine (HHESM): HHESM allows for switching between PM and field winding operation, providing flexibility and efficiency in various applications. Bipolar Hybrid Excitation Synchronous Machine (BHESM): BHESM offers high torque density and dynamic response due to its rotor-mounted PMs, making it suitable for demanding performance requirements. |
| SDESM | Series Double-Excited Synchronous Machine (SDESM): SDESM features a fixed field excitation winding on the rotor, providing control over magnetic fields and torque production. |
| Switch reluctance machine | Switch Reluctance Machine (SRM) with Field Assistance Generator: This machine utilizes field assistance to control the magnetic flux distribution, enhancing efficiency and performance. |
| DSHESG | Dual-Stator Hybrid Excited Synchronous Generator (DSHESG): DSHESG features PMs and a field winding on the rotor, providing control over magnetic flux distribution for improved efficiency. |
| Hybrid Machine Type | Application | Voltage Level | Power Level | Number of Poles | Speed |
|---|---|---|---|---|---|
| CPM | Aerospace, Automotive | 480 | 100 kW | 4 | 1500 |
| TSTFM | Automotive and industrial applications | 690 | 2 MW | 12 | 600 |
| HESM | Marine, Wind turbine | 6600 | 5 MW | 8 | 1200 |
| SynPM | Automotive, Wind turbine | 400 | 500 kW | 6 | 300 |
| CPPM | Rail traction | 1500 | 1.5 MW | 10 | 1800 |
| FCTPM | Robotics, Aerospace | 400 | 200 kW | 8 | 1500 |
| HHESM | Renewable | 6900 | 10 MW | 14 | 100 |
| SDESM | Marine | 33 kV | 20 MW | 20 | 600 |
| SRM | Industrial | 690 V | 100 kW | 6 | 3000 |
| DSHESG | Wind power generation, grid stabilization | 11 kV | 3 MW | 10 | 1200 |
| Number of Phases | Turns | Winding Factor | Back-EMF Compared to 3-Phase (%) | Ripple (%) | B (Line-to-Line Voltage Amplitude) |
|---|---|---|---|---|---|
| 3 | Nt | 1 | - | 15.5 | 1.732 |
| 5 | 5 Nt/3 | 1.0292 | 2.92 | 5.43 | 1.175, 1.902 |
| 7 | 7 Nt/3 | 1.0383 | 3.83 | 2.76 | 0.867, 1.563, 1.949 |
| 9 | 9 Nt/3 | 1.042 | 4.20 | 1.66 | 0.684, 1.285, 1.732, 1.969 |
| 11 | 11 Nt/3 | 1.0434 | 4.34 | 1.15 | 1.732, 1.175, 1.902, 1.959, 1.9255 |
| 13 | 13 Nt/3 | 1.0448 | 4.48 | 0.77 | 1.732, 1.175, 1.902, 0.867, 1.563, 1.949 |
| 15 | 15 Nt/3 | 1.0453 | 4.53 | 0.6 | 1.732, 1.175, 1.902, 0.867, 1.563, 1.949, 0.684 |
| Parameters | Fan-Type Application (e.g., Wind Turbine) | Electrification Application | Grid-Connected Application |
|---|---|---|---|
| Power | |||
| Torque |
| Criteria | Multiphase Machines | Three-Phase Machines |
|---|---|---|
| Manufacturing Costs | Higher due to complex windings and more phases | Lower, simpler windings and fewer phases |
| Maintenance Costs | Lower due to improved fault tolerance | Higher due to lower fault tolerance |
| Down Time Costs | Lower as they can operate with phase failures | Higher as failures can stop the machine |
| Energy Efficiency | Higher efficiency, significant energy savings over time | Standard efficiency |
| Lifecycle Costs | Lower overall lifecycle costs considering maintenance, downtime, and energy savings | Higher overall lifecycle costs |
| Application Suitability | Ideal for critical and high-duty applications | Suitable for standard industrial applications |
| Metric | Multiphase Machines | Hybrid Machines | Three-Phase Machines |
|---|---|---|---|
| Power Density (kW/kg) | High | Medium | Low |
| Torque Density (Nm/kg) | High | Medium | Low |
| Efficiency (%) | 95 | 93 | 90 |
| Reliability | High | Medium | High |
| Flexibility | Medium | High | Low |
| Complexity | High | Very High | Low |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gholamian, M.; Beik, O.; Arshad, M. A Review of State-of-the-Art Multiphase and Hybrid Electric Machines. Electronics 2024, 13, 3636. https://doi.org/10.3390/electronics13183636
Gholamian M, Beik O, Arshad M. A Review of State-of-the-Art Multiphase and Hybrid Electric Machines. Electronics. 2024; 13(18):3636. https://doi.org/10.3390/electronics13183636
Chicago/Turabian StyleGholamian, Mahzad, Omid Beik, and Muhammad Arshad. 2024. "A Review of State-of-the-Art Multiphase and Hybrid Electric Machines" Electronics 13, no. 18: 3636. https://doi.org/10.3390/electronics13183636