


Estimation of Hub Center Loads for Individual Pitch Control for Wind Turbines Based on Tower Loads and Machine Learning



Abstract
:1. Introduction
2. Wind Turbine and Target Loads
2.1. Wind Turbine
2.2. Target Loads
2.3. Load Measurement
3. Explanatory Variables and Machine Learning Models
3.1. Explanatory Variables
3.2. Machine Learning Model
4. Predictive Model Development
4.1. Analysis Flow
4.2. Model Evaluation
5. Predictive Model Validation
5.1. Validation Flow
5.2. Validation Results
6. Individual Pitch Control
6.1. Evaluation Flow
6.2. Evaluation Results
7. Conclusions
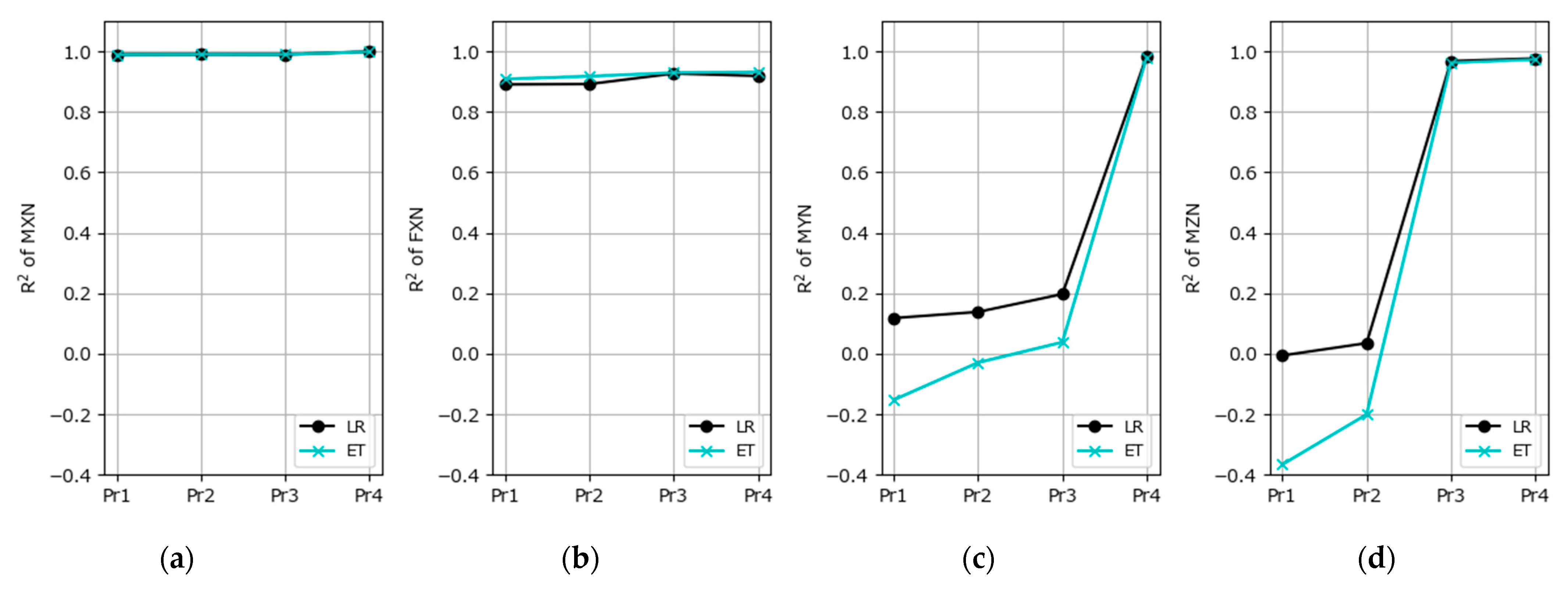
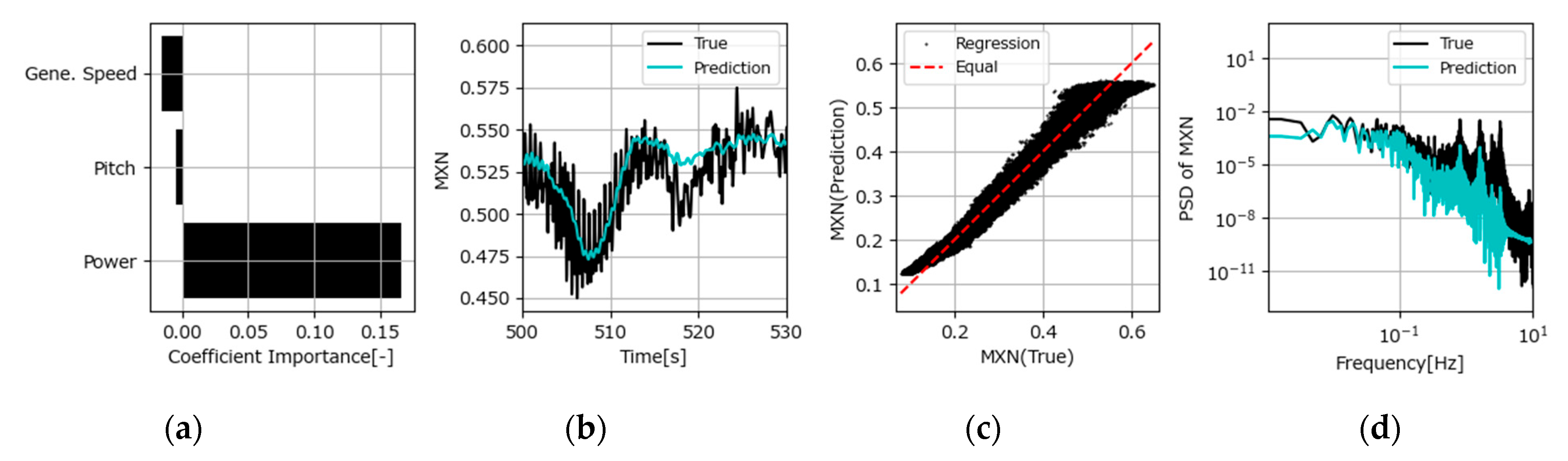
- When a linear machine learning model is insufficient for predicting MXN and FXN, a nonlinear machine learning model can improve the prediction accuracy.
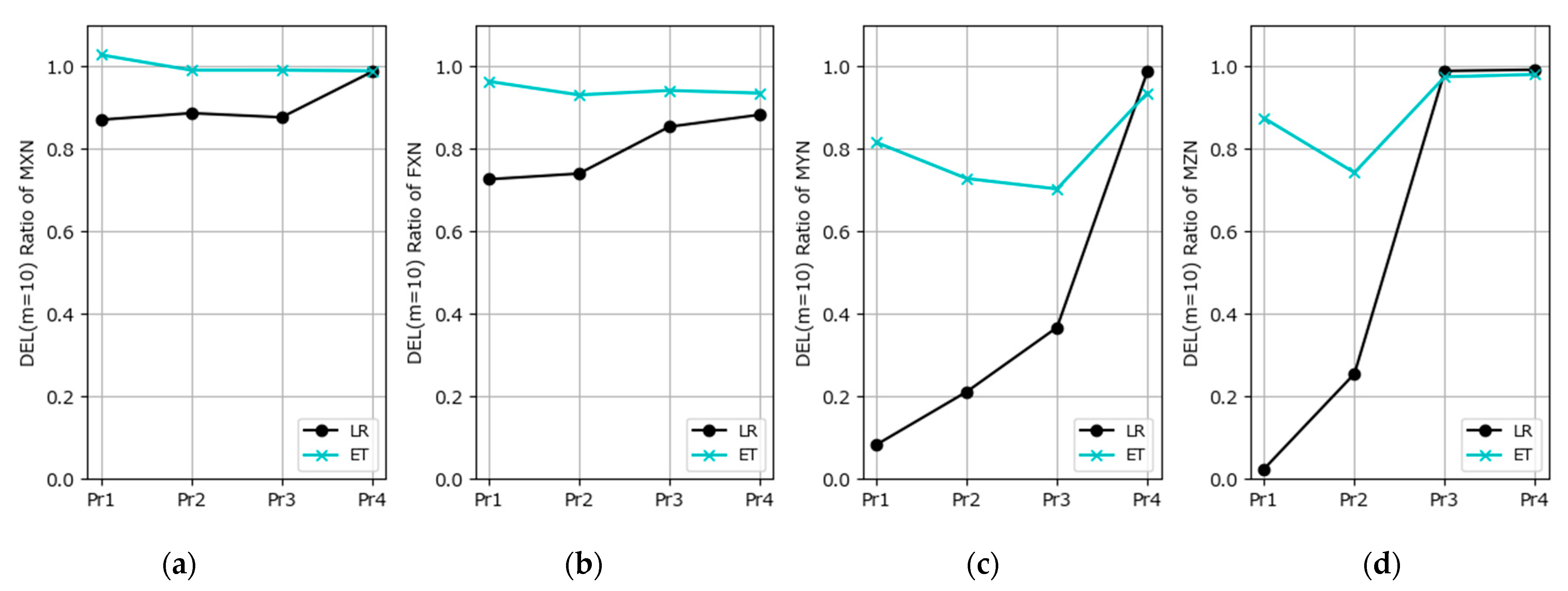
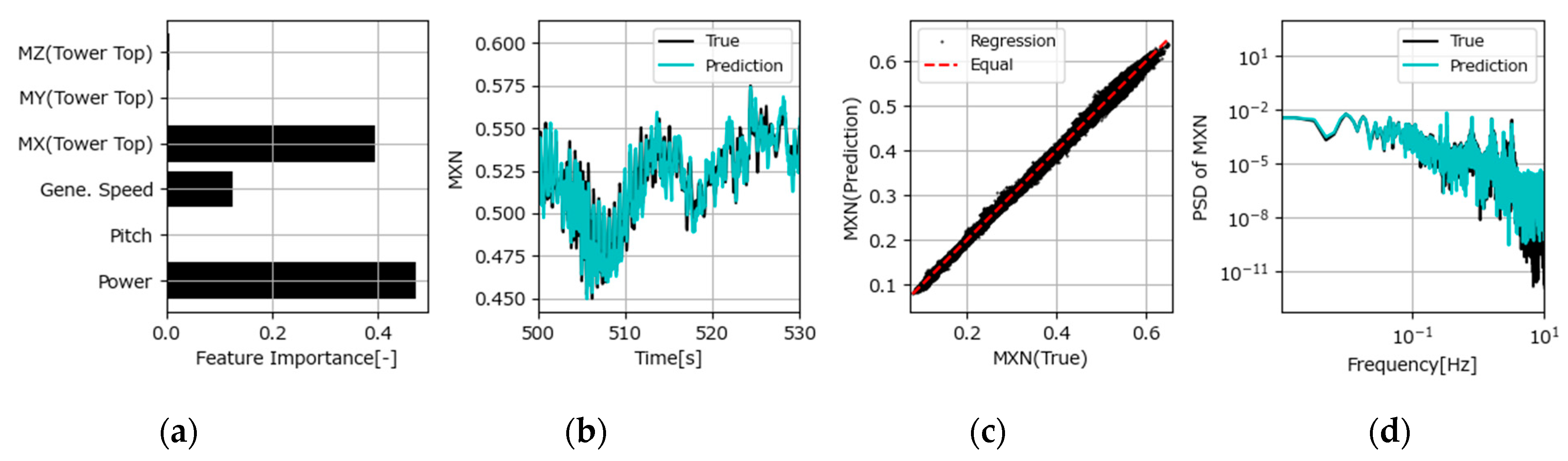
- In predicting MXN, MYN, and MZN, the linear machine learning model provides sufficient prediction accuracy when tower top loads are added to the set of explanatory variables.
- In the prediction of FXN, when operating conditions, nacelle accelerations, tower top loads, and tower bottom loads are used as explanatory variables, there is a DEL error of more than 5%, even with a nonlinear machine learning model.
- While MYN prediction requires tower top loads, MYN can be predicted with tower bottom loads, so the explanatory variables required depend on the target load.
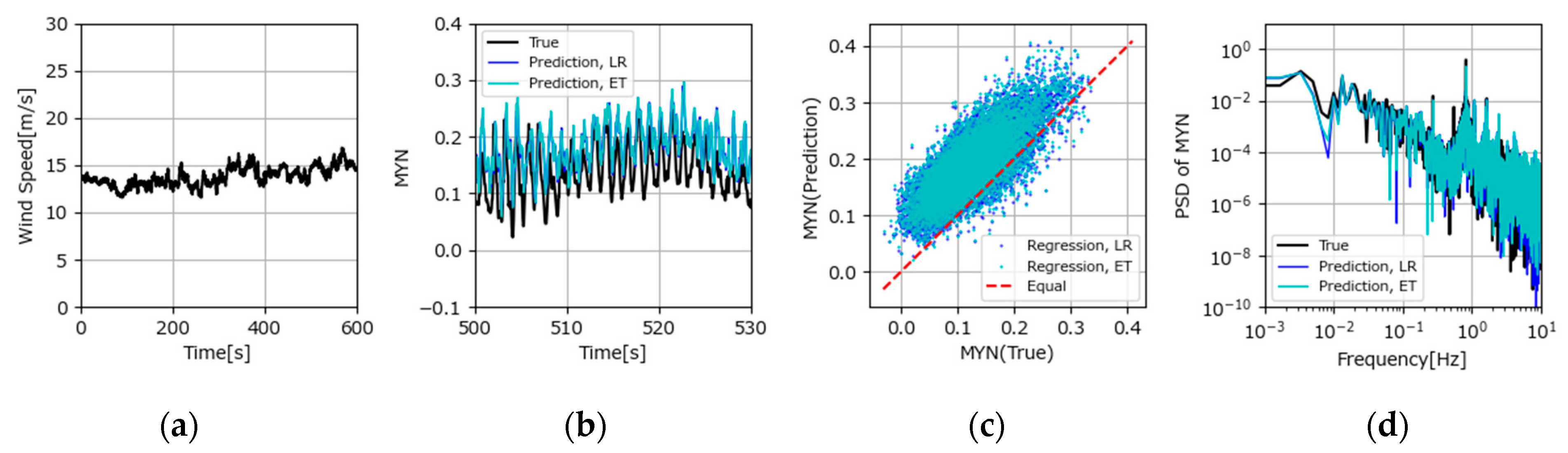
- The prediction models for MYN and MZN developed from the aeroelastic analysis based on tower top loads and operating conditions as explanatory variables were validated by using measured data, and the DEL (m = 10) errors were within 10% for MYN and within 23% for MZN.
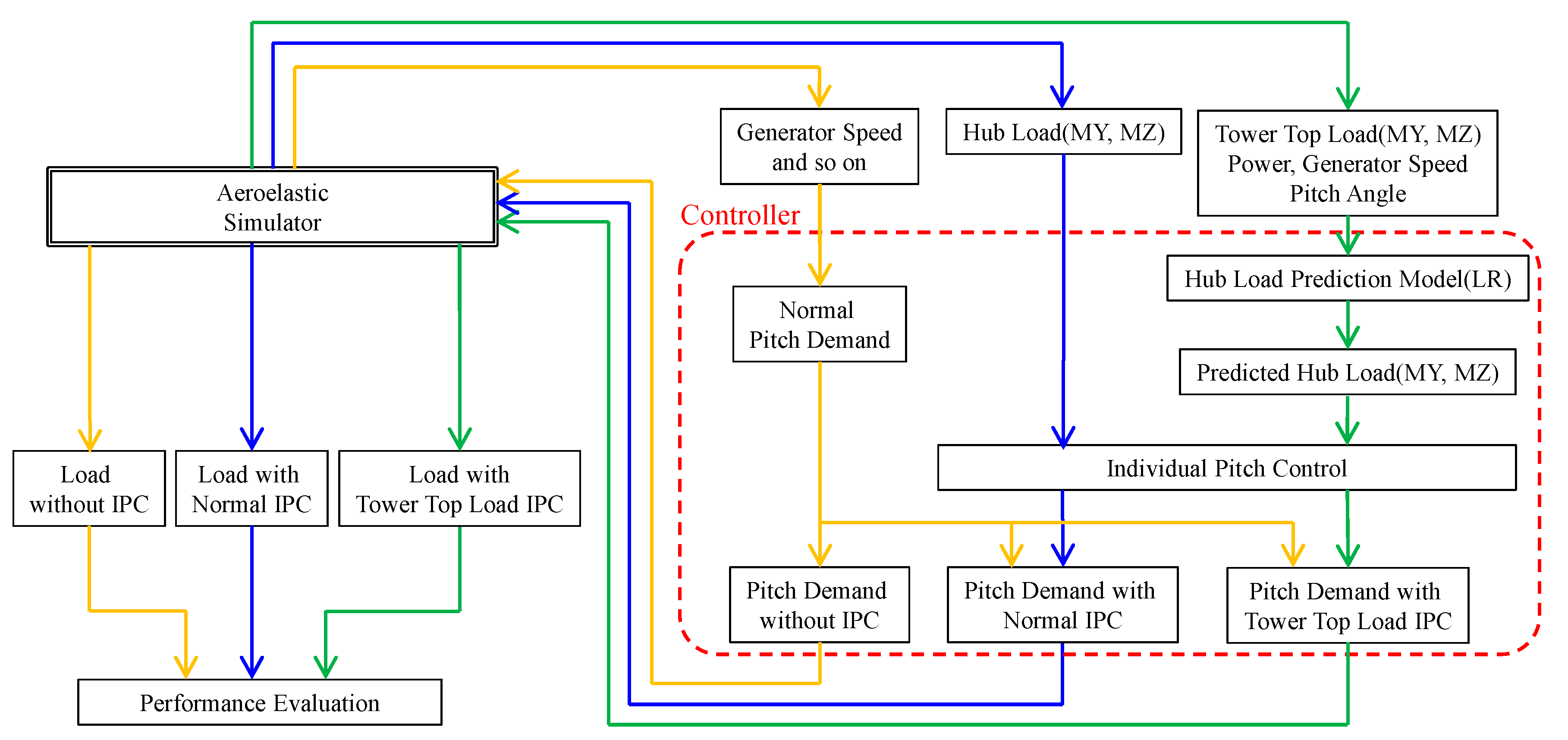
- The time history of the hub center loads was predicted by a machine learning model with tower top loads and operating conditions as explanatory variables, and IPC was implemented by using these loads. The results show that the load reduction effect was equivalent to that of general IPC based on hub loads.
- Investigate whether analysis accuracy can be improved when a neural network is used as a machine learning model.
- Examine whether hub loads can be predicted from the behaviors of the nacelle.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Uchida, T.; Takakuwa, S. A Large-Eddy Simulation-Based Assessment of the Risk of Wind Turbine Failures Due to Terrain-Induced Turbulence over a Wind Farm in Complex Terrain. Energies 2019, 12, 1925. [Google Scholar] [CrossRef]
- Chou, J.-S.; Chiu, C.-K.; Huang, I.-K.; Chi, K.-N. Failure analysis of wind turbine blade under critical wind loads. Eng. Fail. Anal. 2013, 27, 99–118. [Google Scholar] [CrossRef]
- IEC 61400-1; Wind Turbines Part 1: Design Requirement. International Electrotechnical Commission: Geneva, Switzerland, 2005.
- IEC 61400-13; Wind Turbines Part 13: Measurement of Mechanical Loads. International Electrotechnical Commission: Geneva, Switzerland, 2001.
- Cosack, N.; Kühn, M. An Approach for Fatigue Load Monitoring without Load Measurement Devices. In Proceedings of the European Wind Energy Conference, Marseille, France, 16–19 March 2009. [Google Scholar]
- Vera-Tudela, L.; Kühn, M. On the selection of input variables for a wind turbine load monitoring system. Procedia Technol. 2014, 15, 726–736. [Google Scholar] [CrossRef]
- Movsessian, A.; Schedat, M.; Faber, T. Modelling tower fatigue loads of a wind turbine using data mining techniques on SCADA data. Wind Energy Sci. Discuss. 2020, 2020, 1–20. [Google Scholar]
- Movsessian, A.; Schedat, M.; Faber, T. Feature selection techniques for modelling tower fatigue loads of a wind turbine with neural networks. Wind. Energy Sci. 2021, 6, 539–554. [Google Scholar] [CrossRef]
- Seifert, J.; Vera-Tudela, L.; Kuhna, M. Training requirements of a neural network used for fatigue load estimation of offshore wind turbines. Energy Procedia 2017, 137, 315–322. [Google Scholar] [CrossRef]
- Noppe, N.; Iliopoulos, A.; Weijtjens, W.; Devriendt, C. Full load estimation of an offshore wind turbine based on SCADA and accelerometer data. J. Phys. Conf. Ser. 2016, 753, 072025. [Google Scholar] [CrossRef]
- Santos, F.D.N.; Noppe, N.; Weijtjens, W.; Devriendt, C. Data-driven farm-wide fatigue estimation on jacket-foundation OWTs for multiple SHM setups. Wind Energ. Sci. 2022, 7, 299–321. [Google Scholar] [CrossRef]
- Santos, F.D.N.; Noppe, N.; Weijtjens, W.; Devriendt, C. Results of fatigue measurement campaign on XL monopiles and early predictive models. J. Phys. Conf. Ser. 2022, 2265, 032092. [Google Scholar] [CrossRef]
- de N Santos, F.; D’Antuono, P.; Robbelein, K.; Noppe, N.; Weijtjens, W.; Devriendt, C. Long-term fatigue estimation on offshore wind turbines interface loads through loss function physics-guided learning of neural networks. Renew. Energy 2023, 205, 461–474. [Google Scholar] [CrossRef]
- Chrétien, A.; Tahan, A.; Cambron, P.; Oliveira-Filho, A. Operational Wind Turbine Blade Damage Evaluation Based on 10-min SCADA and 1 Hz Data. Energies 2023, 16, 3156. [Google Scholar] [CrossRef]
- Mylonas, C.; Abdallah, I.; Chatzi, E. Conditional variational autoencoders for probabilistic wind turbine blade fatigue estimation using Supervisory, Control, and Data Acquisition data. Wind Energy 2021, 24, 1122–1139. [Google Scholar] [CrossRef]
- Yucesan, Y.A.; Viana, F.A.C. Wind Turbine Main Bearing Fatigue Life Estimation with Physics-informed Neural Networks. In Proceedings of the Annual Conference of the PHM Society, Scottsdale, AZ, USA, 21–26 September 2019; pp. 1–14. [Google Scholar]
- Kamel, O.; Kretschmer, M.; Pfeifer, S.; Luhmann, B.; Hauptmann, S.; Bottasso, C.L. Data-driven virtual sensor for online loads estimation of drivetrain of wind turbines. Forsch. Ingenieurwesen/Eng. Res. 2023, 87, 31–38. [Google Scholar] [CrossRef]
- Avenda, L.D.; Abdallah, I.; Chatzi, E. Virtual fatigue diagnostics of wake-affected wind turbine via Gaussian Process Regression. Renew. Energy 2021, 170, 539–561. [Google Scholar]
- Wiens, M.; Martin, T.; Meyer, T.; Zuga, A. Reconstruction of operating loads in wind turbines with inertial measurement units. Forsch. Ingenieurwesen 2021, 85, 181–188. [Google Scholar] [CrossRef]
- Wei, D.; Li, D.; Jiang, T.; Lyu, P.; Song, X. Load identification of a 2.5 MW wind turbine tower using Kalman filtering techniques and BDS data. Eng. Struct. 2023, 281, 115763. [Google Scholar] [CrossRef]
- Nielsen, M.S.; Rohde, V. A surrogate model for estimating extreme tower loads on wind turbines based on random forest proximities. J. Appl. Stat. 2022, 49, 485–497. [Google Scholar] [CrossRef] [PubMed]
- Noppe, N.; Weijtjens, W.; Devriendt, C. Modeling of quasi-static thrust load of wind turbines based on 1 s SCADA data. Wind Energ. Sci. 2018, 3, 139–147. [Google Scholar] [CrossRef]
- Pandit, R.; Astolfi, D.; Hong, J.; Infield, D.; Santos, M. SCADA data for wind turbine data-driven condition/performance monitoring: A review on state-of-art, challenges and future trends. Wind Eng. 2023, 47, 422–441. [Google Scholar] [CrossRef]
- Bossanyi, E.A. Individual blade pitch control for load reduction. Wind Energy 2003, 6, 119–128. [Google Scholar] [CrossRef]
- Germanischer Lloyd. Guideline for the Certification of Wind Turbine; Germanischer Lloyd: Hamburg, Germany, 2010. [Google Scholar]
- GL Garrad Hassan. Bladed Version 4.2.0.83; GL Garrad Hassan: Bristol, UK, 2012. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer | Hitachi, Ltd. |
| Model | HTW2.0-86 |
| Rotor diameter | 86 m |
| Rotor position | Downwind |
| Rated power | 2 MW |
| Number of blades | 3 |
| Tilt angle | −8 deg |
| Corning angle | 5 deg |
| Hub height | 78 m |
| Power control | Pitch, variable speed |
| Instrument/Sensor | Model (Manufacturer) | Specifications |
|---|---|---|
| Instrument 1 | ENV-1030-CAN (Moog Insensys) | Range: ±3000 με (min.) Resolution: 2 με (typ.) Accuracy: 5 με (short-term) |
| Optical strain gage | Composite retrofit blade sensor array set (Moog Insensys) | - |
| Instrument 2 | NTB-500A, NTB-50A (Kyowa electronic instruments) | Range: ±30,000 με Resolution: 0.1 με Accuracy: 0.1%RD |
| Electrical strain gage | KFG-5-350-C1-11 L15C2R KFG-5-350-D16-11 L15C2S (Kyowa electronic instruments) | - |
| Instrument 3 | NTB-500A, NTB-51A (Kyowa electronic instruments) | Range: 10V Resolution: 100 μV Accuracy: 0.1%RD |
| Model | MAE | MSE | RMSE | R2 | RMSLE | MAPE | TT (s) |
|---|---|---|---|---|---|---|---|
| Extra Trees Regressor | 0.0077 | 0.0001 | 0.011 | 0.98 | 0.0095 | 0.32 | 0.98 |
| CatBoost Regressor | 0.0081 | 0.0001 | 0.011 | 0.98 | 0.0098 | 0.32 | 1.76 |
| Random Forest Regressor | 0.0117 | 0.0003 | 0.017 | 0.95 | 0.0140 | 0.50 | 2.56 |
| K Neighbors Regressor | 0.0126 | 0.0003 | 0.017 | 0.95 | 0.0146 | 0.44 | 0.47 |
| Extreme Gradient Boosting | 0.0130 | 0.0003 | 0.017 | 0.95 | 0.0151 | 0.41 | 0.83 |
| Light Gradient Boosting Machine | 0.0139 | 0.0004 | 0.019 | 0.94 | 0.0160 | 0.53 | 0.59 |
| Decision Tree Regressor | 0.0196 | 0.0009 | 0.030 | 0.84 | 0.0247 | 0.68 | 0.52 |
| Gradient Boosting Regressor | 0.0302 | 0.0015 | 0.039 | 0.73 | 0.0306 | 1.61 | 1.17 |
| AdaBoost Regressor | 0.0509 | 0.0039 | 0.063 | 0.31 | 0.0514 | 1.99 | 0.62 |
| Ridge Regression | 0.0579 | 0.0053 | 0.073 | 0.06 | 0.0580 | 3.05 | 0.46 |
| Linear Regression | 0.0590 | 0.0055 | 0.074 | 0.03 | 0.0589 | 3.11 | 0.98 |
| Lasso Least Angle Regression | 0.0590 | 0.0055 | 0.074 | 0.03 | 0.0589 | 3.12 | 0.46 |
| Lasso Regression | 0.0590 | 0.0055 | 0.074 | 0.03 | 0.0589 | 3.12 | 0.47 |
| Elastic Net | 0.0590 | 0.0055 | 0.074 | 0.03 | 0.0589 | 3.12 | 0.47 |
| Huber Regressor | 0.0592 | 0.0055 | 0.075 | 0.02 | 0.0591 | 3.14 | 0.47 |
| Orthogonal Matching Pursuit | 0.0593 | 0.0056 | 0.075 | 0.02 | 0.0591 | 3.15 | 0.46 |
| Dummy Regressor | 0.0602 | 0.0057 | 0.075 | 0.00 | 0.0598 | 3.22 | 0.64 |
| Passive Aggressive Regressor | 0.0604 | 0.0058 | 0.076 | −0.01 | 0.0607 | 3.04 | 0.46 |
| Least Angle Regression | 0.0614 | 0.0060 | 0.077 | −0.06 | 0.0622 | 3.08 | 0.48 |
| Bayesian Ridge | 0.2656 | 0.2139 | 0.328 | −35.11 | 0.1945 | 8.05 | 0.45 |
| Parameter | Values |
|---|---|
| Mean wind speed [m/s] | 8, 14 |
| Turbulence intensity (Iref) [−] | 0.12, 0.14, 0.16, 0.18 |
| Wind shear exponent (α) [−] | 0.14, 0.2, 0.33, 0.5 |
| Turbulent seed [−] | 1~6 |
| Parameter | Number | |
|---|---|---|
| Pr1 | Power, pitch angle, and generator speed | 3 |
| Pr2 | Power, pitch angle, generator speed, nacelle acceleration X, Y, and Z | 6 |
| Pr3 | Power, pitch angle, generator speed, tower bottom MX, MY, and MZ | 6 |
| Pr4 | Power, pitch angle, generator speed, tower top MX, MY, and MZ | 6 |
| R2 | DEL (m = 10) Ratio | ||||||
|---|---|---|---|---|---|---|---|
| 7 m/s | 14 m/s | 22 m/s | 7 m/s | 14 m/s | 22 m/s | ||
| MYN | LR | −1.752 | −0.841 | 0.626 | 0.905 | 1.024 | 0.983 |
| ET | −2.081 | −0.992 | 0.627 | 0.937 | 1.032 | 0.952 | |
| MZN | LR | 0.217 | 0.039 | 0.553 | 0.807 | 0.999 | 0.778 |
| ET | 0.173 | 0.106 | 0.541 | 0.839 | 1.011 | 0.787 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kiyoki, S.; Yoshida, S.; Rushdi, M.A. Estimation of Hub Center Loads for Individual Pitch Control for Wind Turbines Based on Tower Loads and Machine Learning. Electronics 2024, 13, 3648. https://doi.org/10.3390/electronics13183648
Kiyoki S, Yoshida S, Rushdi MA. Estimation of Hub Center Loads for Individual Pitch Control for Wind Turbines Based on Tower Loads and Machine Learning. Electronics. 2024; 13(18):3648. https://doi.org/10.3390/electronics13183648
Chicago/Turabian StyleKiyoki, Soichiro, Shigeo Yoshida, and Mostafa A. Rushdi. 2024. "Estimation of Hub Center Loads for Individual Pitch Control for Wind Turbines Based on Tower Loads and Machine Learning" Electronics 13, no. 18: 3648. https://doi.org/10.3390/electronics13183648