
A Fresh Revisit of the Issues and Improvements in Impulse Invariance Filter Design for Infinite Impulse Response Filters



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Overview of Digital Filters
1.2. Motivation and Issues in Digital Filter Design
1.3. Prior Works Related to IIF Issues and Remedies
1.4. Objective and Contributions
2. Materials and Methods
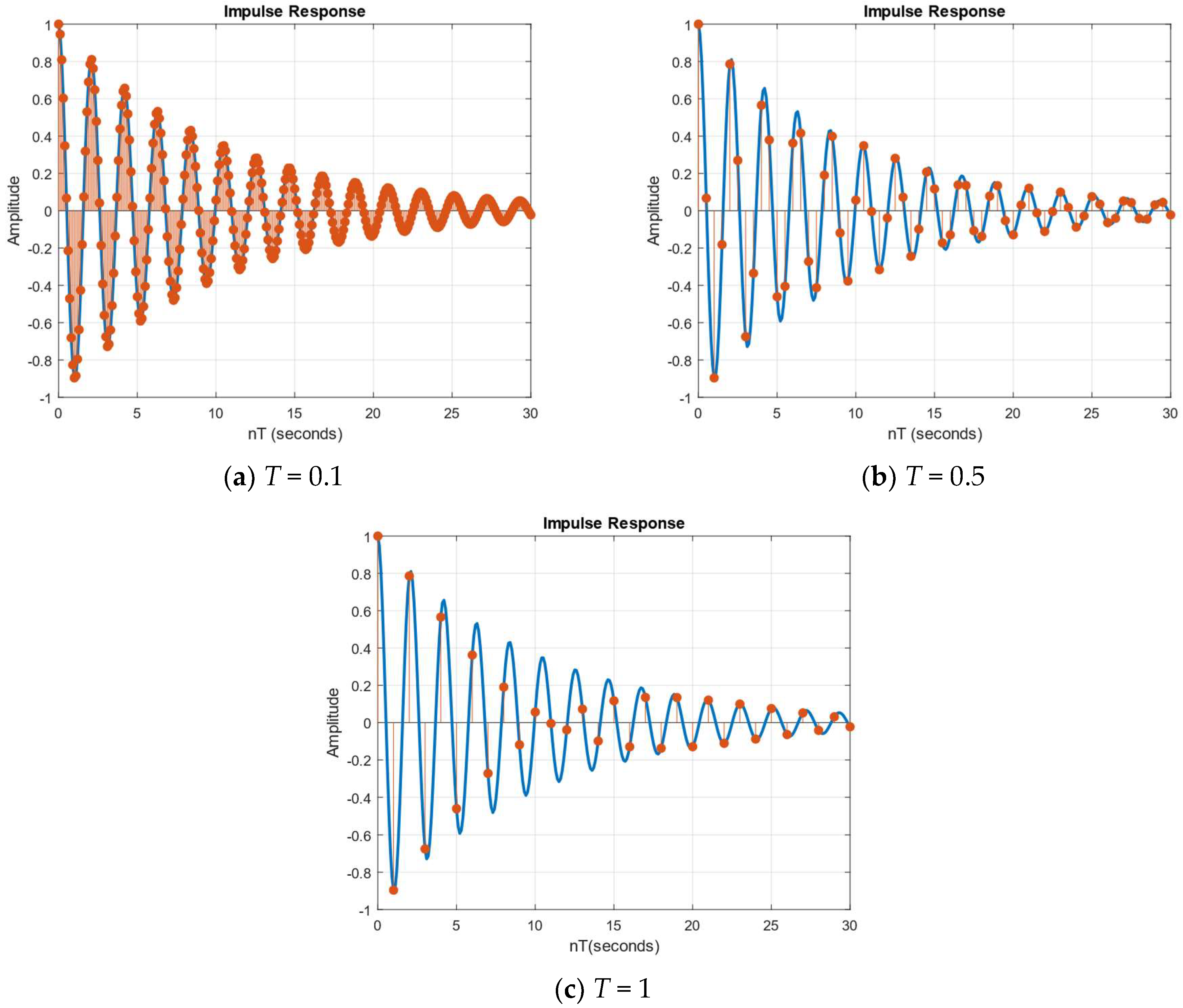
2.1. Impulse Invariance Filter (IIF) Design
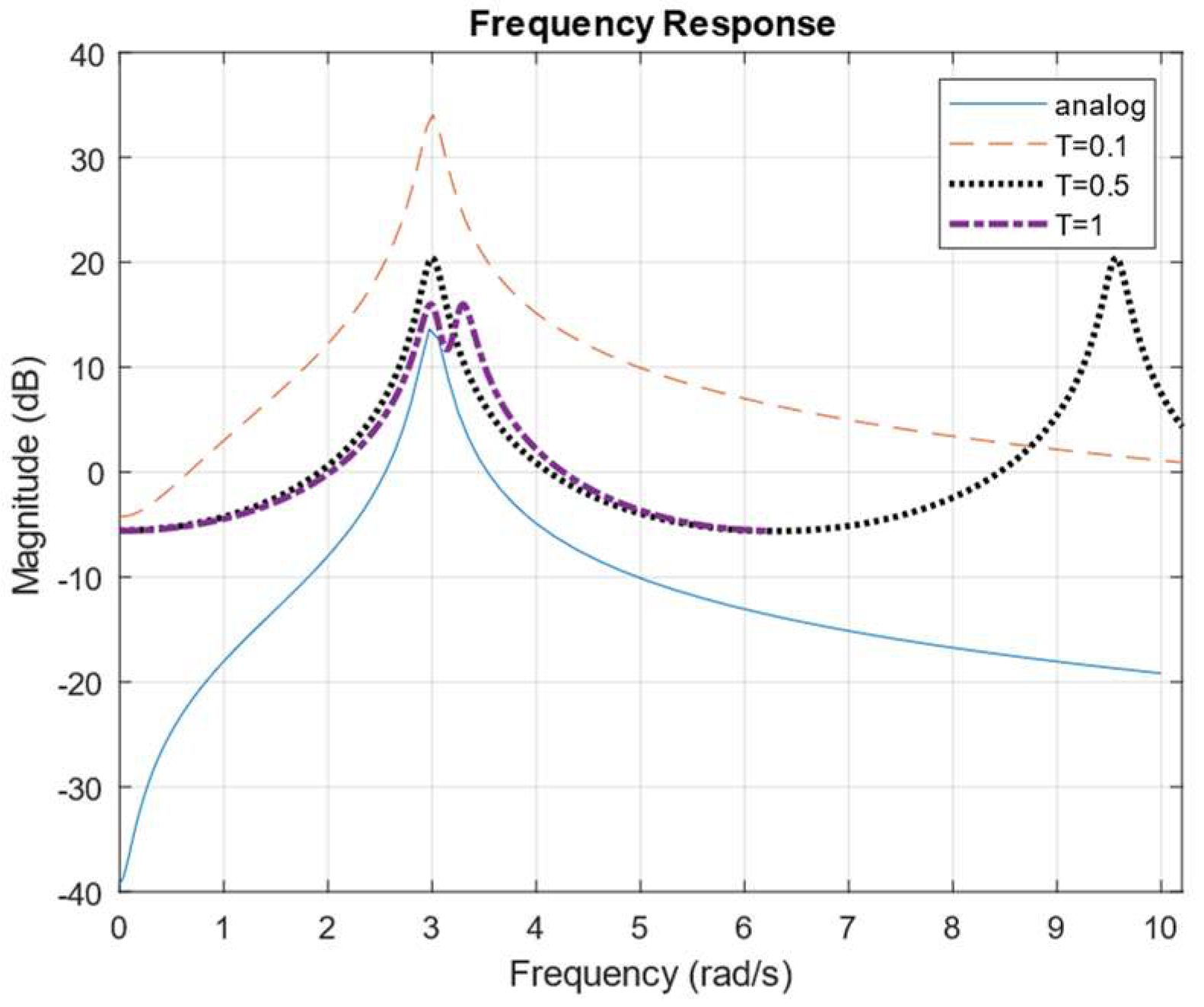
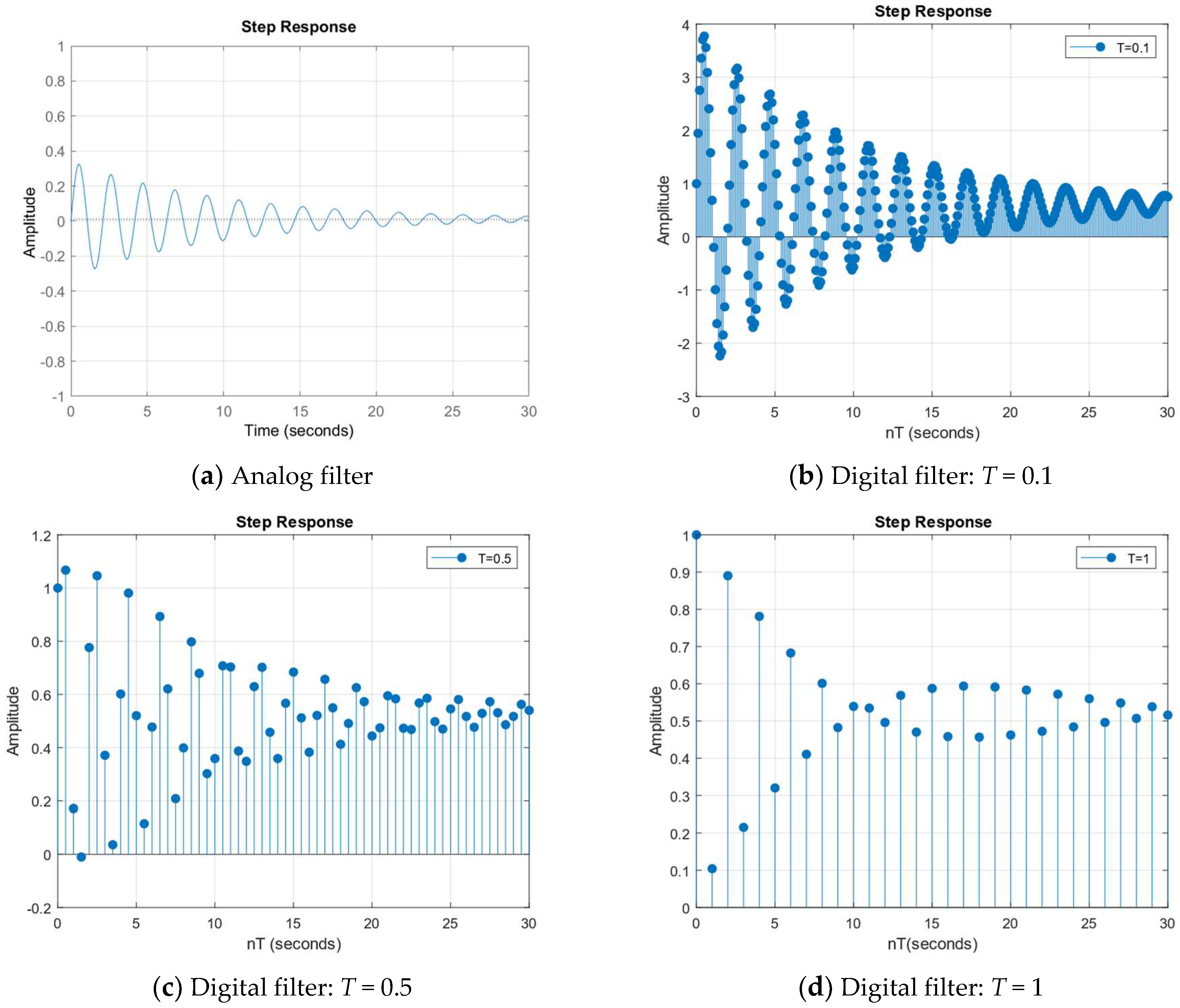
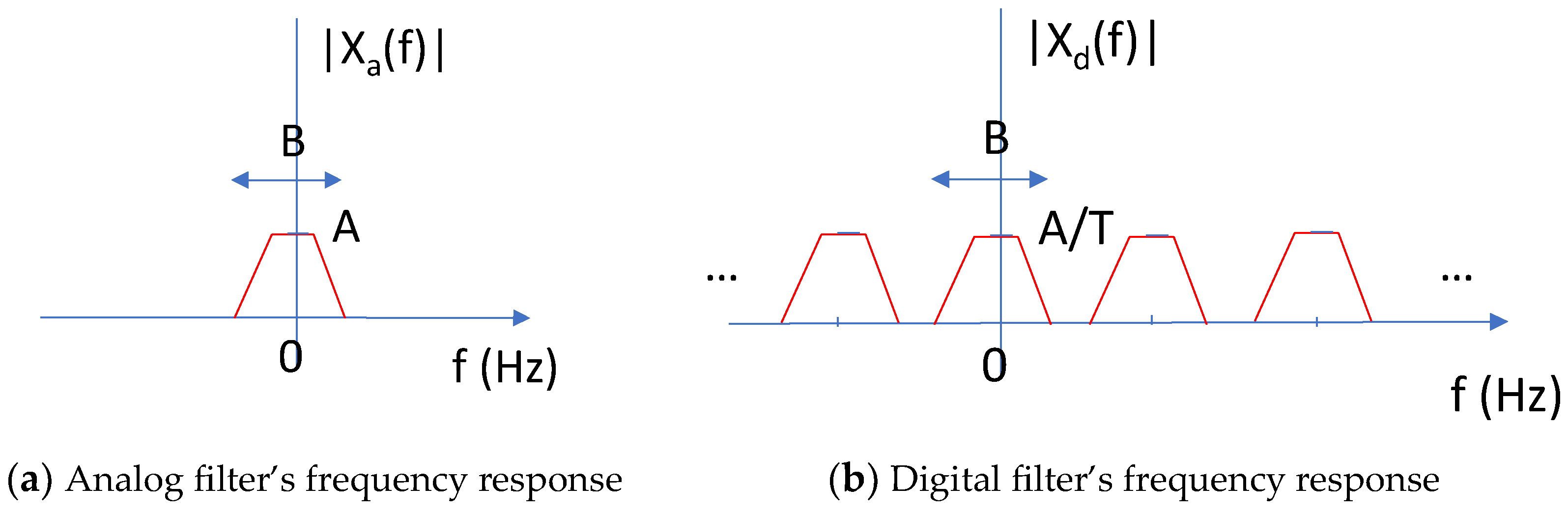
2.2. Issues
2.3. Remedies to Resolve the Inconsistency Issues in Frequency and Step Responses
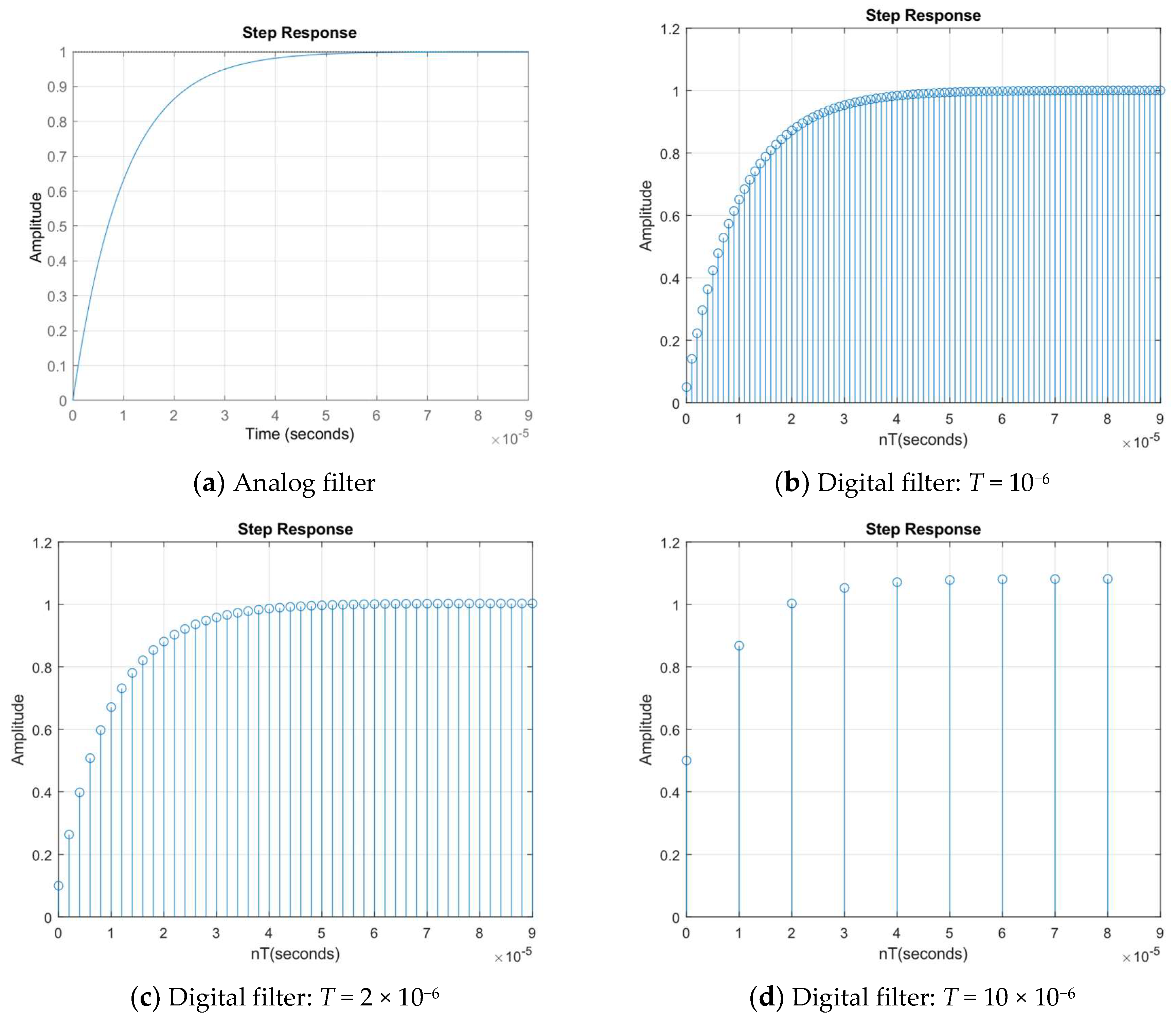
2.3.1. Remedy Method 1: Scale the Digital Filter Frequency and Step Responses by T
2.3.2. Remedy Method 2: Scale the Impulse Response by T
2.4. An Improved IIF Design
3. Additional Examples
3.1. Example 1: Lathi and Green’s Example 5.16 [2]
3.1.1. Traditional Impulse Invariance Design (Section 2.1)
3.1.2. Modified Impulse Invariance Design (Remedy 2 in Section 2.3)
3.1.3. Improved Impulse Invariance Design with a Correction Term
3.2. Example in Jackson’s Paper [3]
4. MATLAB R2021a’s Impinvar Command Using the Modified Impulse Invariance Method without a Correction Term
Example 3: Apply MATLAB R2021a’s Impinvar Command to Equation (21)
- >> omegac = 105; Ba = [omegac]; Aa = [1 omegac]; Fs = 106/pi;
- >> [B,A] = impinvar(Ba,Aa,Fs)
- B = 0.3142
- A = 1.0000−0.7304; % without correction term
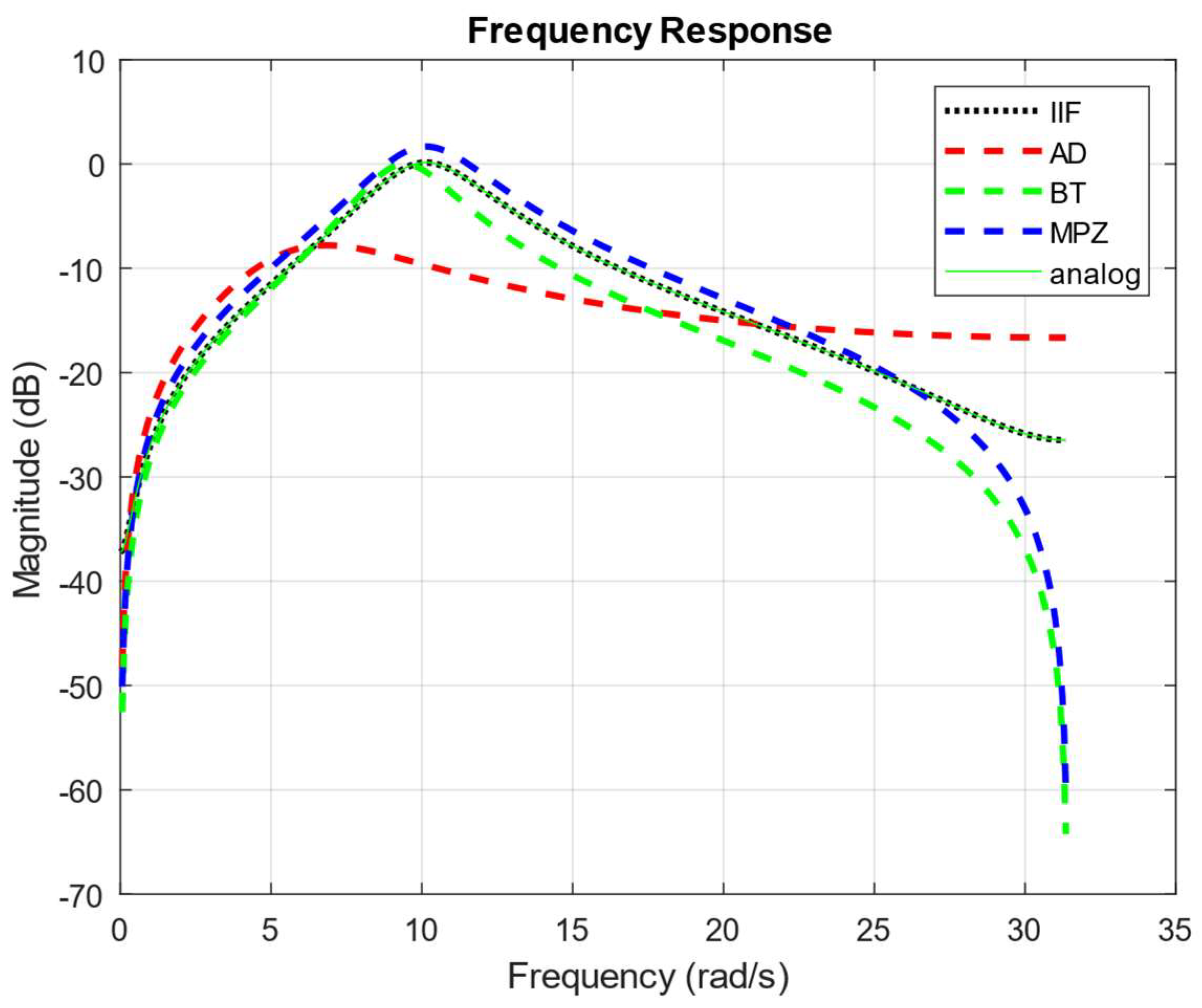
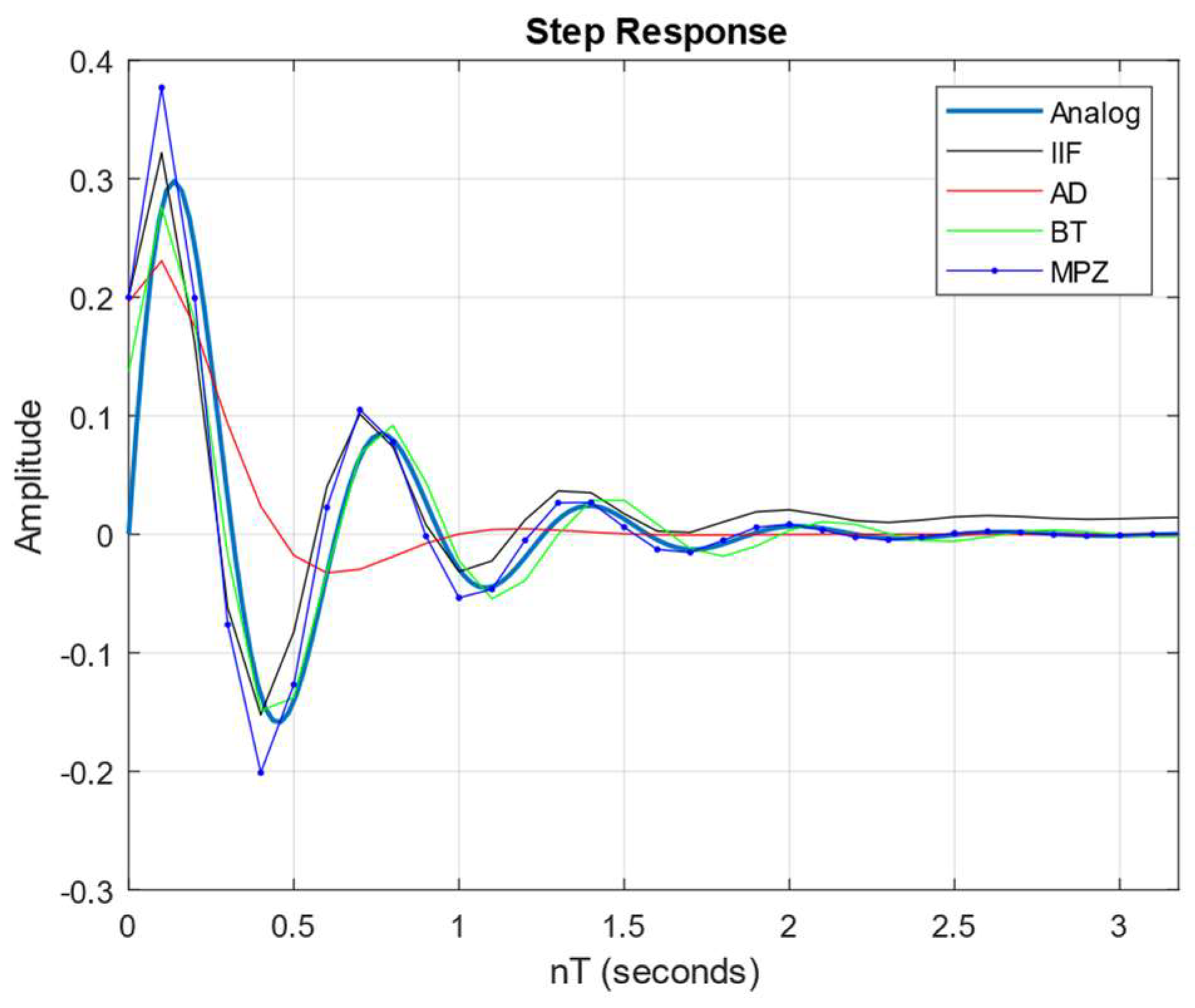
5. Comparative Studies with Three Well-Known Digital IIR Filter Design Techniques
5.1. Comparative Study 1
5.2. Comparative Study 2
5.3. Remarks
- Applicability of IIFAs noted by Oppenheim and Schafer in 1975 [19], IIF is most suitable for bandlimited applications, such as lowpass and bandpass filters. For applications requiring highpass filtering, bilinear transformation (BT) or other methods may be more appropriate.
- Scaling and Bias Term
- ○
- Scaling: The scaling issue is relevant to all IIF filters and should be addressed to ensure accurate filter design.
- ○
- Bias Term: The correction for the bias term is necessary primarily for IIF filters with a relative degree of one where discontinuities in the impulse response occur. For filters with a relative degree greater than one, the bias term is generally not required because the initial value theorem ensures that the initial impulse response value is zero.
- Importance of Correct Filter DesignIn order to select the best filter for an application, one needs to assess several available filters in the literature. If one filter has some inherent issues, such as the IIF without the bias term, then one may easily eliminate the IIF and select other filters. For example, in the second case study in our paper, if the IIF filter is used in the comparison without adding the bias term, then the IIF will be eliminated in the trade-off studies and another filter will be chosen instead. Hence, it is critical to have the correct filters in order to choose the right filter for a given application.
- Mathematical Analysis of ErrorsIt will be important to provide a detailed mathematical analysis of the errors introduced by the correction term, especially for a larger sampling interval T. Jackson’s paper [3] did address this issue, providing a mathematical expression for the error term, which highlights that the contribution of the bias term increases with the sampling period T. In particular, the mathematical expression from Jackson’s paper is as follows:which is actually Equation (19) in our paper. We can see that the last term shows the contribution of the bias term, which is proportional to the sampling period T. Larger Ts will give larger errors in the frequency response.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Proakis, J.; Manolakis, D.G. Digital Signal Processing, 5th ed.; Pearson: London, UK, 2021. [Google Scholar]
- Lathi, B.P.; Green, R. Linear Systems and Signals, 3rd ed.; Oxford University Press: Oxford, UK, 2018. [Google Scholar]
- Jackson, L.B. A correction to impulse invariance. IEEE Signal Process. Lett. 2000, 7, 273–275. [Google Scholar] [CrossRef]
- Shiung, D.; Huang, J.-J.; Yang, Y.-Y. Tricks for Designing a Cascade of Infinite Impulse Response Filters with an Almost Linear Phase Response [Tips & Tricks]. IEEE Signal Process. Mag. 2023, 40, 64–73. [Google Scholar]
- Jain, N.; Rathore, S.; Singh, S.K. Designing and Evaluation of the Reduced Order IIR Filter Design for Signal De-Noising. In Proceedings of the 10th IEEE International Conference on Communication Systems and Network Technologies (CSNT), Bhopal, India, 24–25 April 2021; pp. 375–380. [Google Scholar]
- Kwan, H.K.; Zhang, M. IIR Filter Design Using Multi-Objective Teaching-Learning-Based Optimization. In Proceedings of the 2018 IEEE Canadian Conference on Electrical & Computer Engineering (CCECE), Quebec, QC, Canada, 13–16 May 2018; pp. 1–4. [Google Scholar]
- Pal, R. Comparison of the design of FIR and IIR filters for a given specification and removal of phase distortion from IIR filters. In Proceedings of the International Conference on Advances in Computing, Communication and Control (ICAC3), Mumbai, India, 1–2 December 2017; pp. 1–3. [Google Scholar]
- Zahradnik, P. Closed-form design of optimal equiripple FIR filters. In Proceedings of the 2nd International Conference on Telecommunication and Networks (TEL-NET), Noida, India, 10–11 August 2017. [Google Scholar]
- Nagahara, M. Min-Max Design of FIR Digital Filters by Semidefinite Programming. 2013. Available online: http://arxiv.org/abs/1308.2013v1 (accessed on 17 September 2024).
- Boyaci, O.; Narimani, M.R.; Davis, K.; Serpedin, E. Infinite Impulse Response Graph Neural Networks for Cyberattack Localization in Smart Grids. 2022. Available online: http://arxiv.org/abs/2206.12527v1 (accessed on 17 September 2024).
- Kennedy, H.L. Digital Filters with Vanishing Moments for Shape Analysis. 2019. Available online: http://arxiv.org/abs/1912.07133v4 (accessed on 17 September 2024).
- Kennedy, H.L. Digital Filter Designs for Recursive Frequency Analysis. 2014. Available online: http://arxiv.org/abs/1408.2294v3 (accessed on 17 September 2024).
- Valderrama-Cuervo, J.C.; López-Parrado, A. Open Cores for Digital Signal Processing. 2014. Available online: http://arxiv.org/abs/1402.6005v1 (accessed on 17 September 2024).
- Raju, M.H.; Friedman, L.; Bouman, T.M.; Komogortsev, O.V. Filtering Eye-Tracking Data from an EyeLink 1000: Comparing Heuristic, Savitzky-Golay, IIR, and FIR Digital Filters. 2023. Available online: http://arxiv.org/abs/2303.02134v1 (accessed on 17 September 2024).
- Kennedy, H.L. Recursive and Non-recursive Filters for Sequential Smoothing and Prediction with Instantaneous Phase and Frequency Estimation Applications (Extended Version). 2023. Available online: http://arxiv.org/abs/2311.07089v3 (accessed on 17 September 2024).
- Vargas, R.A.; Burrus, C.S. Iterative Design of Lp Digital Filters. 2012. Available online: http://arxiv.org/abs/1207.4526v1 (accessed on 17 September 2024).
- Kumar, V.; Bhooshan, S. Design of One-Dimensional Linear Phase Digital IIR Filters Using Orthogonal Polynomials. 2013. Available online: http://arxiv.org/abs/1307.2817v1 (accessed on 17 September 2024).
- Carrasco, J.; Heath, W.P.; Ahmad, N.S.; Wang, S.; Zhang, J. Convex Searches for Discrete-Time Zames-Falb Multipliers. 2018. Available online: http://arxiv.org/abs/1812.02397v1 (accessed on 17 September 2024).
- Oppenheim, A.V.; Schafer, R.W. Digital Signal Processing, 1st ed.; Pearson: London, UK, 1975. [Google Scholar]
- Mecklenbräuker, W.F. Remarks on and correction to the impulse invariant method for the design of IIR digital filters. Signal Process. 2000, 80, 1687–1690. [Google Scholar] [CrossRef]
- Gabel, R.A.; Roberts, R.A. Signals and Linear Systems; Wiley: New York, NY, USA, 1987; pp. 408–422. [Google Scholar]
- Lyons, R.G. Understanding Digital Signal Processing, 3rd ed.; Prentice Hall: Hoboken, NJ, USA, 2011. [Google Scholar]
- Lewis, F.L. Applied Optimal Control and Estimation; Prentice-Hall: Hoboken, NJ, USA, 1992. [Google Scholar]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwan, C.; Ferguson, H. A Fresh Revisit of the Issues and Improvements in Impulse Invariance Filter Design for Infinite Impulse Response Filters. Electronics 2024, 13, 3753. https://doi.org/10.3390/electronics13183753
Kwan C, Ferguson H. A Fresh Revisit of the Issues and Improvements in Impulse Invariance Filter Design for Infinite Impulse Response Filters. Electronics. 2024; 13(18):3753. https://doi.org/10.3390/electronics13183753
Chicago/Turabian StyleKwan, Chiman, and Hal Ferguson. 2024. "A Fresh Revisit of the Issues and Improvements in Impulse Invariance Filter Design for Infinite Impulse Response Filters" Electronics 13, no. 18: 3753. https://doi.org/10.3390/electronics13183753